Изобретение относится к летательным аппаратам, а именно к самолетам.
Известен самолет, состоящий из фюзеляжа с нижним и верхним крыльями, в хвостовой части которого смонтировано оперение в виде киля с рулем поворота и стабилизатора с рулем высоты (Журнал: Крылья родины, 1999, 10.2, с.20).
Недостаткам указанного самолета является ухудшение эксплуатационных свойств при смещении центра тяжести груза относительна центровки.
Наиболее близким к заявляемому устройству является самолет, содержащий фюзеляж с хвостовым оперением в виде киля с рулем поворота и стабилизатора с рулем высоты, к нижней чести которого прикреплено нижнее крыло, а на верхней части установлено с возможностью смещения верхнее крыло, которое связано с механизмом передвижения верхнего крыла, который выполнен в виде направляющих и привода (Патент РФ 2018465, кл. В 64 С 39/06, 1994).
К недостатку прототипа относится невозможность автоматического изменения расположения верхнего крыла при смещении центра тяжести груза относительно центровки из-за конструктивного оформления.
Задачей изобретения является создание самолета с улучшенными эксплуатационными свойствами.
Поставленная цель достигается тем, что в самолете, включающем фюзеляж, нижнее и верхнее крылья, хвостовое oпeрение в виде киля с рулем поворота и стабилизатора с рулем высоты, механизм передвижения верхнего крыла и привод, согласно изобретению на верхней части фюзеляжа выполнены опорная площадка с продольным пазом для установки верхнего крыла и две щели, расположенные вдоль боков опорной площадки, а механизм передвижения верхнего крыла смонтирован в салоне на верхней части фюзеляжа и выполнен из двух расположенных с боков под опорной площадкой и симметрично относительно оси фюзеляжа направляющих со стойками на концах, винта, размещенного между направляющими, двух ползунов, помещенных втулками на направляющие и связанных через щели с верхним крылом, и гаек, насаженных на винт, четырех выключателей, попарно закрепленных на направляющих на расстоянии одной пары до другой, определяемом экспериментально, четырех датчиков, попарно заделанных в пол салона фюзеляжа на расстоянии одной пары до другой, определяемом соотношением
где Г - расстояние между датчиками на длине салона фюзеляжа;
Б - расстояние от первой (носовой) пары датчиков до заднего торца фюзеляжа,
при этом на середине нижней поверхности верхнего крыла выполнено поперечное ребро по форме паза опорной площадки, ширина щелей выполнена с возможностью перемещения в них проушин втулок ползунов, а привод состоит из электродвигателя, редуктора и двух муфт, причем датчик выполнен в виде выключателя и упора.
Предлагаемый самолет поясняется чертежами, где:
на фиг.1 - самолет, вид сбоку;
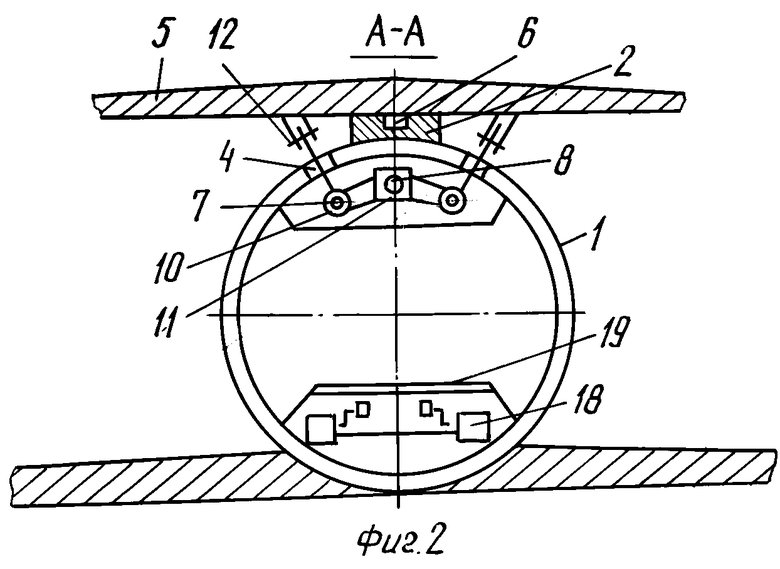
не фиг.2 - самолет, поперечный разрез по А-А на фиг.1;
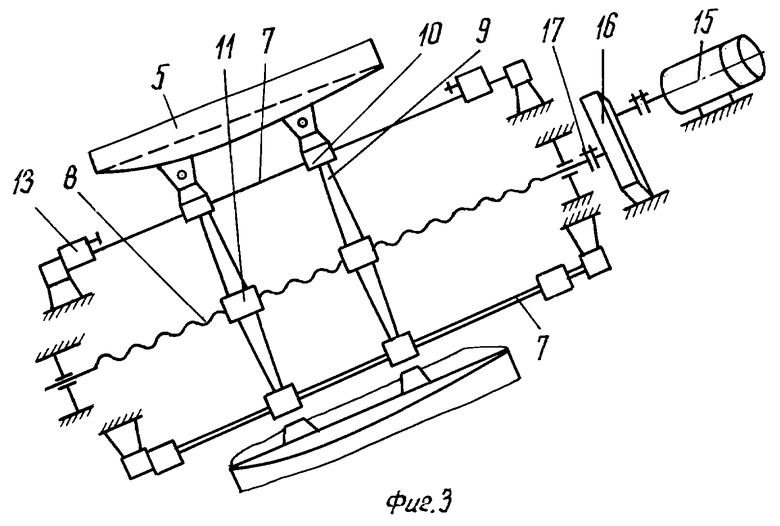
на фиг. 3 изображен механизм передвижения верхнего крыла со смонтированным крылом;
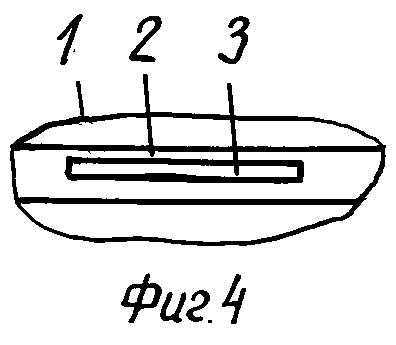
на фиг.4 показана опорная площадка, вид сверху;
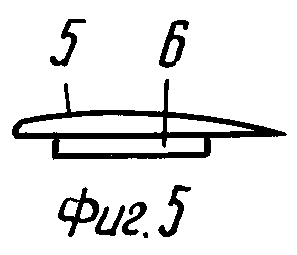
на фиг.5 показано верхнее крыло, вид сбоку;
на фиг.6 изображен ползун, вид спереди;
на фиг.7 показана щель, вид сбоку;
на фиг.8 изображен датчик, вид сбоку.
Самолет включает фюзеляж 1 с нижним крылом и хвостовым оперением в виде киля с рулем поворота и стабилизатора с рулем высоты.
На верхней части фюзеляжа 1 выполнена опорная площадка 2. На верхней поверхности опорной площадки 2 прорезан продольный паз 3. С боков опорной площадки 2 на фюзеляже 1 сделаны две продольные щели 4, расположенные друг против друга и симметрично относительно продольной оси фюзеляжа 1. Верхнее крыло 5 установлено на опорную площадку 2. На середине нижней поверхности крыла 5 выполнено поперечное ребро 6 (по форме паза опорной площадки). При установке крыла 5 ребро 6 помещают в паз 3. В салоне на верхней части фюзеляжа 1 смонтирован механизм передвижения верхнего крыла 5. Он состоит из двух расположенных с боков под опорной площадкой 2 и симметрично относительно продольной оси фюзеляжа 1 направляющих 7 со стойками на концах, прикрепленными к потолку фюзеляжа 1, винта 8, размещенного между направляющими 7 и концами заделанного в подшипники стоек, жестко связанных с потолком фюзеляжа 1, двух ползунов 9, каждый из которых выполнен из двух втулок 10, помещенных на направляющие 7, с проушиной, пропущенной через щель 4, и гайки 11, насаженной на винт 8, пальца 12, соединяющих проушины втулок 10 с проушинами верхнего крыла 5, четырех выключателей 13, попарно закрепленных на направляющих 7 на расстоянии друг от друга, определяемом экспериментально, четырех датчиков 14, попарно заделанных в пол салона фюзеляжа 1 на расстоянии одной пары до другой, определяемом соотношением Г = Б + 1/4Б, где Г - расстояние между датчиками на длине салона фюзеляжа, Б - расстояние от первой (носовой) пары датчиков до заднего торца фюзеляжа 1, привода, состоящего из электродвигателя 15, редуктора 16 и двух муфт 17, которые связывают между собой электродвигатель, редуктор и винт 8, закрепленных на кронштейне, мягко связанном с фюзеляжем. Каждый датчик 14 состоит из выключателя 18 и упора 19.
Самолет работает следующим образом.
При размещении груза в салоне фюзеляжа 1 центр тяжести располагают соответственно центровке самолета, благодаря чему обеспечивают самолету горизонтальное положение при перемещении в воздушной среде и легкость управления.
При ручном управлении расположением верхнего крыле 5 оператор в зависимости от положения центра тяжести груза относительно центровки включает в электроцепь электродвигатель 15, вал которого вращается по часовой стрелке, когда груз смещен к носу, направление стрелки В на фиг.1, а может и против часовой стрелки, когда груз смещен к хвосту, направление стрелки Д на фиг.1. В обоих случаях при вращении винта 8 оба ползуна 9 перемещаются гайкой по винту 8, втулками 10 по направляющим 7. При этом передвигается и крыло 5 по опорной площадке 2, а его ребро 6 движется в пазу 3. Когда втулки 10 одной пары, например носовой, войдут в контакт с выключателями 13 первой пары, происходит размыкание цепи, а значит, и обесточивание привода. В этой случае двигатель 15, редуктор 16 и муфты 17 прекращают вращение, а крыло 5 занимает фиксированное положение соответственно нахождению центра тяжести груза. Для передвижения крыла 5 в сторону хвоста фюзеляжа 1 приводу задают вращение в направлении, например, против часовой стрелки посредством перевода рукоятки реверсивного переключателя в нужное положение.
При работе в автоматическом режиме задействуют датчики 14. При этом, если во время полета (а может и при размещении груза при заполнении салона фюзеляжа 1 на стоянке) центр тяжести груза смещается к носу устройства, т.е. в направлении стрелки В на фиг.1, груз наползает на упоры 19 первой (носовой) пары датчиков 14. При этом yпоp 19 нажимает на ролик выключателей 18, цепь замыкается и ток поступает на электродвигатель 15, с вала которого вращение, например, по часовой стрелке передают через муфту 17 редуктору 16, а через другую муфту 17 винту 8. При вращении винта 8 вдоль его оси движутся гайки 11 ползунов 9. Вместе с гайками втулки 10 скользят по направляющим 7 в том же направлении, т.е. к носу фюзеляжа. Когда втулки 10 первого ползуна 9 войдут в контакт с выключателями 13 носовой пары, цепь обесточивается и происходит останов привода. Перемещенное к носу фюзеляжа 1 верхнее крыле 5 фиксируется в положении, соответствующем нахождению центра тяжести груза. При этом условии фюзеляж 1 занимает горизонтальное положение в воздушной среде, благодаря чему облегчают управление самолетом.
Если при перемещении в воздушной среде центр тяжести груза сместится к хвосту фюзеляжа 1, то при этом условии крыло 5 передвигается в направлении второй (хвостовой) пары датчиков 14. Груз наползает на упоры задних датчиков 14, которые нажимают на ролики выключателей 18. Электрическая цепь замыкается и ток подается на привод. Крыло 5, скользя по опорной площадке 2, движется к хвосту и, как только втулки 10 второго ползуна 9 войдут в контакт с выключателями 13 второй пары, происходит обесточивание цепи, а значит, и останов привода. Крыло 5 фиксируется этим в положении, соответствующем нахождению центра тяжести смещенного груза. Самолет летит горизонтально.
Ручное и автоматическое управление механизмом передвижения верхнего крыла на земле и при перемещении в воздушной среде улучшает условия эксплуатации.
Размещение механизма передвижения верхнего крыла внутри салона фюзеляжа предохраняет его от воздействия внешней окружающей среды.
Выполнение на опорной площадке продольного паза, а на нижней поверхности верхнего крыла поперечного ребра упрощает установку крыла на фюзеляж и облегчает проведение наладочных и ремонтных работ.
Щели, выполненные на боковой поверхности фюзеляжа, обеспечивают размещение механизма передвижения крыла в салоне фюзеляжа, а пальцы 12 - надежную связь крыла 5 с ползунами.
Данное устройство может быть использовано в качестве транспортного средства для транспортирования груза и пассажиров в воздушной среде.
Значительно упрощается управление самолетом за счет автоматического изменения расположения верхнего крыла в зависимости от смещения центра тяжести груза относительно центровки. Понижается трудоемкость обслуживания и ремонта.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ | 2003 |
|
RU2231475C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ВОЗДУШНОЙ СРЕДЕ | 1999 |
|
RU2172701C2 |
| САМОЛЕТ | 2003 |
|
RU2231476C1 |
| САМОЛЕТ | 2003 |
|
RU2231477C1 |
| САМОЛЕТ | 2005 |
|
RU2284949C1 |
| САМОЛЕТ | 2004 |
|
RU2261196C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ВОЗДУШНОЙ СРЕДЕ | 2000 |
|
RU2184054C2 |
| САМОЛЕТ | 2003 |
|
RU2249544C1 |
| САМОЛЕТ | 2003 |
|
RU2228283C1 |
| САМОЛЕТ | 2004 |
|
RU2277060C1 |
Изобретение относится к летательным аппаратам. Самолет включает фюзеляж, нижнее и верхнее крылья, хвостовое оперение, механизм передвижения верхнего крыла с приводом. На верхней части фюзеляжа выполнены опорная площадка с продольным пазом для установки верхнего крыла и две щели, расположенные вдоль боков опорной площадки. Механизм передвижения верхнего крыла смонтирован в салоне на верхней части фюзеляжа. Механизм выполнен из двух направляющих со стойками на концах, расположенных с боков под опорной площадкой и симметрично относительно продольной оси фюзеляжа, винта, размещенного между направляющими, двух ползунов, помещенных втулками на направляющие и связанных через щели с верхним крылом, гаек, насаженных на винт, четырех выключателей, попарно закрепленных на направляющих на расстоянии одной пары до другой, четырех датчиков, попарно заделанных в пол салона фюзеляжа на расстоянии одной пары до другой. На середине нижней поверхности верхнего крыла выполнено поперечное ребро по форме паза опорной площадки. Привод состоит из электродвигателя, редуктора и двух муфт. Датчик выполнен в виде выключателя и упора. Изобретение направлено на улучшение эксплуатационных свойств. 8 ил.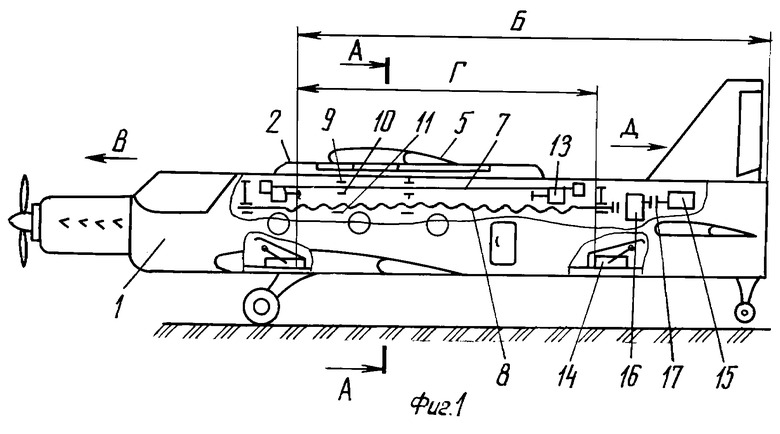
Самолет, включающий фюзеляж, нижнее и верхнее крылья, хвостовое оперение в виде киля с рулем поворота и стабилизатора с рулем высоты, механизм передвижения верхнего крыла и привод, отличающийся тем, что на верхней части фюзеляжа выполнена опорная площадка с продольным пазом для установки верхнего крыла и две щели, расположенные вдоль боков опорной площадки, а механизм передвижения верхнего крыла смонтирован в салоне на верхней части фюзеляжа и выполнен из двух расположенных с боков под опорной площадкой и симметрично относительно продольной оси фюзеляжа направляющих со стойками на концах, винта, размещенного между направляющими, двух ползунов, помещенных втулками на направляющие и связанных через щели с верхним крылом, и гаек, насаженных на винт, четырех выключателей, попарно закрепленных на направляющих на расстоянии одной пары до другой, четырех датчиков, попарно заделанных в пол салона фюзеляжа на расстоянии одной пары до другой, определяемом соотношением
где Г - расстояние между датчиками на длине салона фюзеляжа;
Б - расстояние от первой (носовой) пары датчиков до заднего торца фюзеляжа,
при этом на середине нижней поверхности верхнего крыла выполнено поперечное ребро по форме паза опорной площадки, ширина щелей выполнена с возможностью перемещения в них проушины втулок ползунов, а привод состоит из электродвигателя, редуктора и двух муфт, причем датчик выполнен в виде выключателя и упора.
| ЭКРАНОЛЕТ | 1991 |
|
RU2018465C1 |
| US 4899954 А, 13.02.1990 | |||
| ДВУХСТАДИЙНЫЙ ТЕМПЕРАТУРНЫЙ ПРОФИЛЬ ДЛЯ КУЛЬТИВИРОВАНИЯ ВИРУСОВ | 2008 |
|
RU2476594C2 |
| Шланговое соединение | 0 |
|
SU88A1 |

