Изобретение относится к области диагностики технического состояния морских участков трубопроводов и может быть использовано для оценки напряженно-деформированного состояния трубопроводов и оценки остаточного ресурса трубопровода.
Отличительной особенностью глубоководных трубопроводов большой протяженностью, уложенных без заглубления в грунт, является то, что для них остается неизвестной или труднодоступной для контроля фактическая геометрия прокладки труб на дно, при которой из-за неровностей дна, естественных ошибок в процессе прокладки (например, не полностью скомпенсированный дрейф судна-трубоукладчика) или других причин могут возникнуть большие дополнительные статические напряжения.
Возможность образования прогибов труб на различных длинах, изменения величин этих прогибов и длин в эксплуатации трубопровода за счет изменения геометрии дна под воздействием течений или различного рода подвижек, в том числе и систематического характера, может приводить к тому, что на различных участках протяженного трубопровода могут возникать нежелательные резонансные сверхнизкочастотные колебания. При этом форма упругой линии, частота собственных колебаний и амплитуды для одного и того же участка в процессе эксплуатации трубопровода под воздействием указанных выше факторов также могут меняться.
Поэтому для морских трубопроводов данные о фактической геометрии трубопровода и изменения геометрии во времени имеют принципиальное значение для мониторинга технического состояния трубопроводов.
Известен способ аналогичного назначения, в котором частично поставленная задача решается с помощью системы гидроакустических радиобуев [1].
Недостатком известного способа являются его невысокие точность и надежность, что обусловлено наличием морских шумов и низким пространственным разрешением используемой гидроакустической аппаратуры. Также недостатком является отсутствие информации о фактической геометрии трубопровода и изменениях его положения во времени.
За прототип принят способ определения места расположения потенциально опасного участка подводного трубопровода [2], заключающийся в том, что на контролируемом участке трубопровода с заданным шагом устанавливают последовательность акустических приемников. При этом в сам трубопровод вводят специальный источник звука. Акустические приемники принимают звуковые волны от движущего внутри трубопровода источника звука и направляют их на обработку в береговое устройство.
Недостатком прототипа является необходимость ввода (и вывода) в трубопровод специального движущего источника звука, что не позволяет осуществлять мониторинг технического состояния глубоководного трубопровода непосредственно в процессе его работы (транспортировки продукта). Прототип также не обеспечивает данными о фактической геометрии трубопровода и изменениях его положения во времени, что является необходимым для корректной оценки остаточного ресурса трубопровода.
Техническим результатом, получаемым от внедрения изобретения, является устранение данных недостатков прототипа, т.е. получение возможности непрерывного или периодического проведения мониторинга технического состояния глубоководного трубопровода.
Данный технический результат достигают за счет того, что в известном способе определения места расположения потенциально опасного участка глубоководного трубопровода, заключающемся в приеме в заданные моменты времени акустических сигналов последовательностью акустических приемников, установленных на трубопроводе, акустические приемники выполняют в виде гидроакустических приемоответчиков, снабженных датчиками глубины, а акустические сигналы принимают от последовательности гидроакустических приемоизлучателей, установленных на известном расстоянии от трубопровода в горизонтальной плоскости, причем после принятия акустических сигналов измеренная датчиками глубины информация переизлучается приемоответчиками на соответствующие приемоизлучатели и по временной задержке принятых приемоизлучателями акустических сигналов определяют пространственные координаты трубопровода в горизонтальной плоскости, а по информации датчиков глубины определяют пространственные координаты трубопровода в вертикальной плоскости, при этом о расположении потенциально опасного участка трубопровода судят по обнаруженному изгибу последнего в вертикальной или горизонтальной плоскости.
Кроме того, по изменению пространственных координат различных участков трубопровода во времени определяют параметры сверхнизкочастотных колебаний трубопровода, по которым уточняют место расположение его потенциально опасного участка.
Изобретение поясняется чертежом, на котором представлена схема устройства для реализации способа.
Устройство для реализации способа включает в себя последовательность автономных гидроакустических приемоответчиков 11, 12...1N, установленных на контролируемом участке глубоководного трубопровода 2 с заданным шагом и смонтированных в корпусах 31, 32...3N, совместно с датчиками 41, 42...4N глубины.
Выходы датчиков 41, 42...4N глубины через модуляторы 51, 52...5N соединены с управляемыми электрическими входами приемоответчиков 11, 12... 1N.
Автономное питание элементов 1, 4, 5 осуществляется от источника питания 6, закрепленного также на трубопроводе 2.
Напротив приемоответчиков 1 на морском дне (плоскость YZ) расположена последовательность гидроакустических приемоизлучателей 71, 72... 7N, соединенных подводным кабелем 8, по которому на приемоизлучатели 7 подается электропитание и отводятся выходные сигналы на береговую обрабатывающую аппаратуру (не показано).
Автономные приемоответчики 1 представляют собой гидроакустические приемники, которые по таймеру (не показан) запускают режим ожидания приемоответчика. Перевод приемоответчика в режим ожидания производится в заданные моменты времени, когда излучаются сигналы приемо-излучателя. После приема сигнала приемоизлучателя приемоответчик посылает к нему соответствующую кодовую гидроакустическую посылку.
Приемоизлучатели 7 представляют собой гидроакустические направленные излучатели и гидроакустические приемники, соединенные подводным кабелем.
Береговая аппаратура (не показана) включает типовой информационно-вычислительный комплекс и устройство дистанционного питания и управления.
Остальные элементы устройства особенностей не имеют.
Способ определения места расположения потенциально опасного участка глубоководного трубопровода реализуется следующим образом.
Приемоответчики 1 находятся постоянно в отключенном состоянии и включаются в режим ожидания приема по команде таймера (не показан). Такое включение производится, исходя из необходимости экономии элекропотребления и требуемой скважности определения координат трубопровода, и обычно составляет около 10 дней. В режиме, когда работает только таймер, энергопотребление от автономного источника питания 6 незначительно (0,1 мВт). В режиме приема сигналов электропотребление составляет 50 мВт.
В установленные временные интервалы (когда приемоответчики находятся в режиме ожидания приема сигнала) по подводному кабелю 8 от берегового устройства дистанционного питания на приемоизлучатели 7 поступает командный сигнал и последний переходит в режим излучения. Приемоответчики 1, приняв излученный сигнал, переходят в режим переизлучения с энергопотреблением 1 Вт. При этом в переизлученный сигнал вводится информация о глубине данного участка трубопровода 2 (координата Z перпендикулярная плоскости чертежа) от датчика глубины 4.
С другой стороны, относительная временная задержка принятых приемоизлучателями 7 сигналов, переизлученных приемоответчиками 1, несет информацию о координате Y, ортогональной оси трубопровода 2.
Принятые сигналы по подводному кабелю 8 направляются на береговую аппаратуру (не показана).
По измеренным значениям координат трубопровода определяются изгибы последнего в вертикальной или горизонтальной плоскости и параметры сверхнизкочастотных вибраций, которые указывают на место расположения потенциально опасного участка трубопровода.
Данным способом мониторинг технического состояния трубопровода может проводиться непрерывно или периодически с наперед заданными циклами.
Таким образом, достигается поставленный технический результат.
Источники информации
1. Подводная технология. / Под ред. И.Б. Иконникова, "Судостроение", 1, 1981, с 84.
2. Заявка Японии 2 - 46840, кл. F 17 D 5/06, G 01 M 3/24, 1990 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СТАЦИОНАРНАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГЛУБОКОВОДНОГО ТРУБОПРОВОДА | 2001 |
|
RU2193724C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МОРСКОГО УЧАСТКА ТРУБОПРОВОДА | 2000 |
|
RU2183303C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА | 2015 |
|
RU2592741C1 |
| СТАНЦИЯ КОНТРОЛЯ УРОВНЕЙ ШУМОВ МОРСКИХ НЕФТЕГАЗОВЫХ КОМПЛЕКСОВ | 2011 |
|
RU2480789C2 |
| УСТРОЙСТВО КОНТРОЛЯ ИСПРАВНОСТИ ТРУБОПРОВОДА ГАЗОКОНДЕНСАТА | 2010 |
|
RU2464485C2 |
| СПОСОБ СЕЙСМИЧЕСКОГО МИКРОРАЙОНИРОВАНИЯ | 2010 |
|
RU2436125C1 |
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ГЛУБОКОВОДНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА (ВАРИАНТЫ) | 2008 |
|
RU2392537C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
Изобретение относится к области диагностики технического состояния морских участков трубопроводов и может быть использовано для мониторинга технического состояния глубоководных трубопроводов большой протяженностью. Существо изобретения: вдоль контролируемого участка трубопровода закрепляют с заданным шагом последовательность гидроакустических приемоответчиков, снабженных датчиками глубины, напротив которых устанавливают с тем же шагом последовательность гидроакустических приемоизлучателей. При этом по выходным сигналам датчиков глубины определяют вертикальные координаты различных участков трубопровода, а по временной задержке переизлученных акустических сигналов - горизонтальные. Техническим результатом изобретения является получение информации об изгибе последнего в вертикальной и горизонтальной плоскостях, по которому судят о расположении потенциально опасного участка трубопровода. 1 з.п. ф-лы, 1 ил.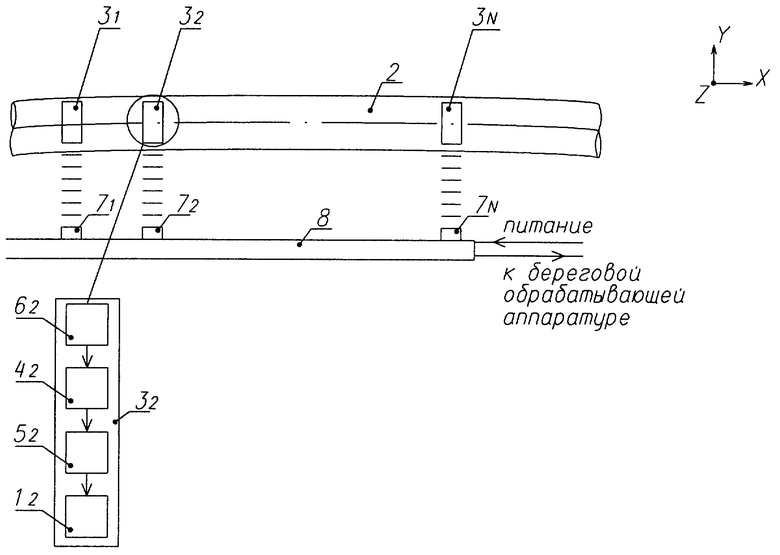
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТ УТЕЧЕК В НАПОРНЫХ ТРУБОПРОВОДАХ | 1992 |
|
RU2053436C1 |
| ТЕЧЕИСКАТЕЛЬ | 1991 |
|
RU2047039C1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА И МЕСТА ПОВРЕЖДЕНИЯ ТРУБОПРОВОДА | 0 |
|
SU191284A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНРГ^ ТРУБОПРОВОДА | 0 |
|
SU380909A1 |
| Способ определения момента и места утечки газа в системе газопроводов периодического действия | 1987 |
|
SU1698562A1 |

