Изобретение относится к машиностроению, а именно к механизмам свободного хода, и может найти применение, в частности, в импульсных приводах и устройствах.
Известен механизм свободного хода, содержащий ведущую и ведомую полумуфты, образующие клиновую полость, размещенный в ней упор, закрепленный на ведущей полумуфте, в корпусе упора установлены пружина и дискретный клин, контактные поверхности составных частей которого выпуклы [Патент ФРГ 882778, кл. 47 С 6, 1949].
Нагрузочная способность такого механизма невелика, так как ролики в дискретном клине расположены в клиновом пространстве в один ряд, суммарная контактная поверхность их невелика и, кроме того, при заклинивании создается возможность, за счет неточности изготовления, неодновременного заклинивания всех роликов.
Известен механизм свободного хода, содержащий ведущую и ведомую полумуфты, образующие клиновую полость, размещенный в ней упор, закрепленный на ведущей полумуфте, в корпусе упора установлены пружина и дискретный клин, составные части которого выполнены одинаковыми и расположены в несколько рядов, а их контактные поверхности имеют равные радиусы кривизны [Авторское свидетельство СССР 697759, кл. F 16 D 41/06, 1978].
Нагрузочная способность такого механизма выше за счет перераспределения нагрузок среди элементов дискретного клина и повышения контактной поверхности за счет самоустанавливаемости дискретных тел.
Кинематическая связь передает часть рабочего момента, но в целом механизм является фрикционным, т.е. на рабочих поверхностях клина требуется создание фрикционных условий контакта. Известно, что нормальные силы в этом случае в пять - десять раз выше полезных касательных.
Известен клиновой механизм свободного хода, содержащий обойму, эксцентрик, установленное на нем промежуточное кольцо, кинематически связанное с обоймой, подпружиненный клин, имеющий составные части, размещенный в клиновой полости между промежуточным кольцом и обоймой, отличающийся тем, что составные части клина выполнены в виде дискретных элементов, размещенных в сепараторе, опирающихся на зубчатые поверхности, выполненные на промежуточном кольце и обойме, а промежуточное кольцо установлено с возможностью дополнительного движения в направлении движения эксцентрика [прототип - патент РФ 2156897, F 16 D 41/06, Б.И. 27, 2000].
Указанные механизмы имеют значительно более высокую нагрузочную способность и долговечность, однако компенсация погрешностей изготовления в таких устройствах может производиться только за счет подбора точных размеров дискретных элементов и их упругих свойств. Неравномерность нагруженности элементов приводит к снижению нагрузочной способности, с одной стороны, снижению долговечности, с другой. Кроме того, дискретные элементы постоянно работают одними и теми же контактными поверхностями, что приводит к локальному повышенному износу. Необходимость изготовлять дискретные элементы упругими для компенсации погрешностей и снижения динамических нагрузок при свободном ходе приводит к снижению усталостной прочности элементов, что снижает долговечность указанных механизмов.
Задачей данного изобретения является создание клинового механизма свободного хода (МСХ,) обеспечивающего высокую долговечность и нагрузочную способность.
Техническим результатом изобретения являются повышение нагрузочной способности МСХ и долговечности.
Для получения технического результата в клиновом механизме свободного хода, содержащем обойму с внутренними зубчатыми поверхностями, эксцентрик, установленное на нем промежуточное кольцо с наружными зубчатыми поверхностями и возможностью дополнительного движения в направлении движения эксцентрика, кинематически связанное с обоймой, подпружиненный клин, размещенный в клиновой полости между промежуточным кольцом и обоймой, имеющий составные части, выполненные в виде дискретных элементов, опирающихся на зубчатые поверхности, размещенных в сепараторе, в сепараторе установлен дополнительный подпружиненный клин с размещенными на его поверхностях компенсирующими элементами, взаимодействующими с дискретными элементами в направлении радиусов обоймы и промежуточного кольца, а сепаратор ограничивает перемещение дискретных элементов в радиальном направлении при свободном ходе.
Такое выполнение позволило осуществлять передачу полезного момента нормальными силами, при этом дискретные тела при контакте с зубчатыми поверхностями автоматически перераспределяют между собой нагрузки за счет взаимодействия между собой, компенсирующими элементами и дополнительным подпружиненным клином, а так же сепаратором, компенсируя неточности изготовления, фактически повышая площадь контактной поверхности между дискретными телами и зубьями и тем самым повышая нагрузочную способность. Дискретные элементы, выполненные, например, в виде роликов, имеют высокую жесткость и износостойкость за счет возможностей создания высококачественных поверхностей, с одной стороны, и за счет постоянной смены контактных поверхностей и равномерного износа, а также возможностей его автоматической компенсации, с другой. Таким образом, значительно повышается долговечность. Имеется возможность подбора рациональных геометрических параметров и упругих свойств, что позволяет повысить долговечность механизма. В процессе выключения клиновая полость разгружает дискретные элементы, подпружиненный дополнительный клин и компенсирующие элементы продолжают воздействовать на дискретные элементы, однако их нахождение в сепараторе позволяет поддерживать требуемую форму набора как единого целого. Весь клин поддерживается в постоянном контакте с рабочими поверхностями клиновой полости с помощью пружины, воздействующей на сепаратор, жесткость которой определяется динамическими характеристиками клина и фрикционными условиями свободного хода. Наличие зубчатых поверхностей не приводит к ударным нагрузкам, как в случае с храповыми механизмами, так как во время свободного хода клин с дискретными элементами представляет из себя единое целое, клин скользит по вершинам зубчатых поверхностей, а усилия пружины, воздействующей на сепаратор, не достаточно для того, чтобы дискретные элементы были расположены во впадинах. Таким образом, повышается долговечность и нагрузочная способность и из-за отсутствия ударного (храпового) режима работы свободного хода.
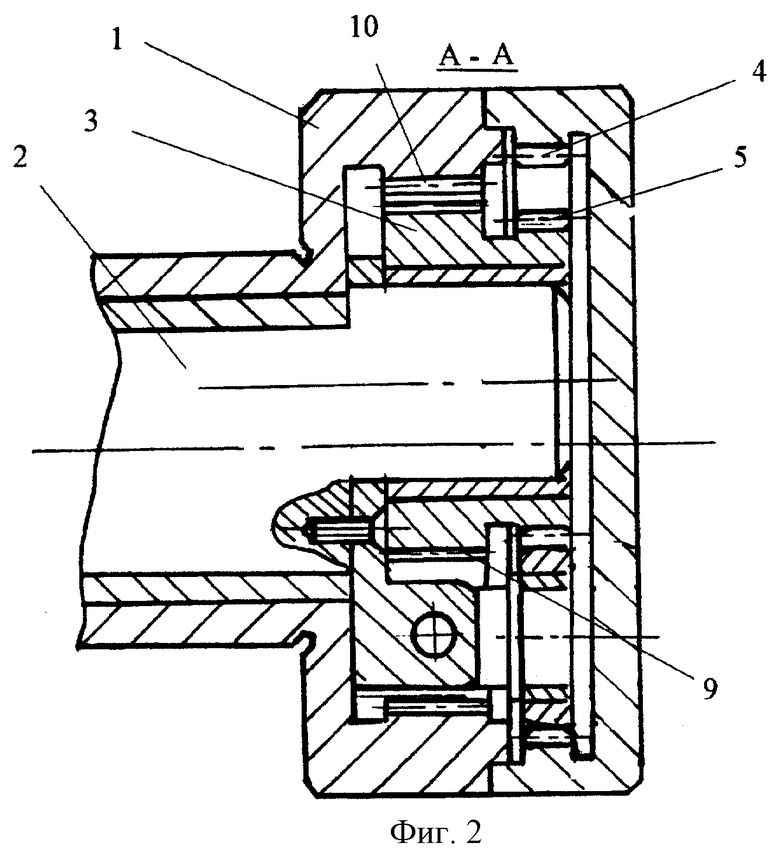
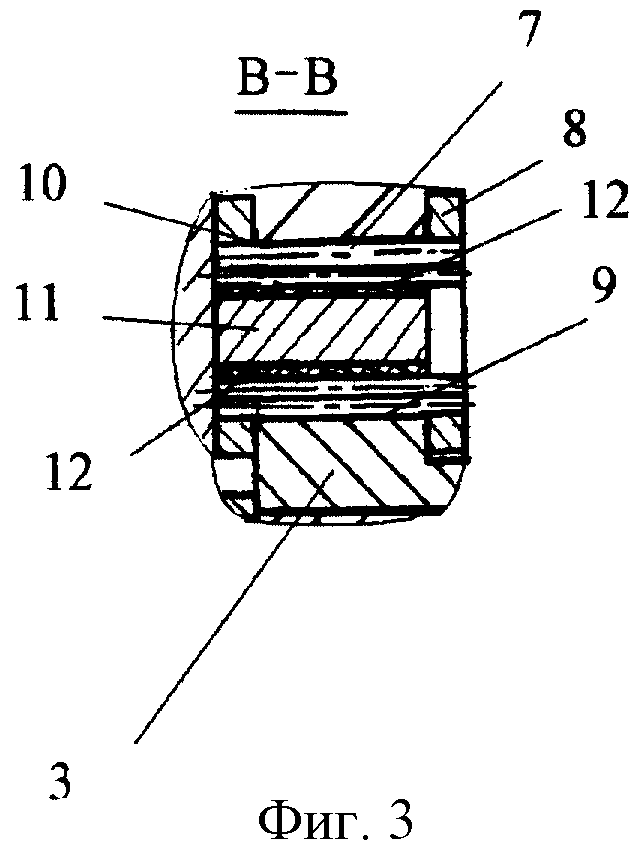
Сущность изобретения поясняется чертежом, где на фиг.1 показан механизм свободного хода; на фиг.2 - разрез по А-А на фиг.1; на фиг.3 - разрез по В-В на фиг.1.
Механизм свободного хода состоит из обоймы 1, эксцентрика 2, установленного на нем промежуточного кольца 3, кинематически, например, с помощью внутренних зубчатых поверхностей 4 обоймы 1, наружных зубчатых поверхностей 5 промежуточного кольца 3 и паразитного колеса 6 связанного с обоймой, подпружиненного клина, выполненного в виде дискретных элементов 7, размещенных в сепараторе 8. Составные части 7 опираются на зубчатые поверхности 9, выполненные на промежуточном кольце 3, установленном на эксцентрике 2 с возможностью дополнительного движения в направлении, совпадающем с направлением движения эксцентрика, и на зубчатые поверхности 10, выполненные на обойме 1. В сепараторе 8 установлен дополнительный подпружиненный клин 11, на поверхностях которого размещены компенсирующие элементы 12, взаимодействующие с дискретными элементами 7 в направлении радиусов обоймы 1 и промежуточного кольца 3. Сепаратор 8 ограничивает перемещение дискретных элементов 7 в радиальном направлении при свободном ходе.
Механизм свободного хода работает следующим образом.
При вращении эксцентрика 2 в сторону заклинивания (фиг.1 против часовой стрелки) дискретные элементы 7 распираются между поверхностями клиновой полости обоймы 1 и промежуточного кольца 3. Вершины зубчатых поверхностей 9 промежуточного кольца 3 и зубчатые поверхности 10 обоймы 1, перемещаясь в радиальном направлении, заставляют деформироваться компенсирующие элементы 12 и за счет тангенциальной составляющей силы переместиться внутри сепаратора 8 подпружиненный клин 11, что приведет к размещению дискретных элементов 7 во впадинах зубьев с компенсацией погрешностей изготовления и самоустановкой под нагрузкой. Кинематическая связь - зубчатые поверхности 4, 5 и паразитное колесо 6, создает дополнительное движение промежуточному кольцу 3 в сторону движения эксцентрика 2 и дополнительно нагружает полезной силой дискретные элементы 7, передающие полезный момент через зубья зубчатых поверхностей 9 промежуточного кольца 3 и зубчатые поверхности 10 обоймы 1 с помощью нормальных сил. Наблюдается фаза передачи полезного момента.
При движении эксцентрика 2 в противоположном направлении дискретные элементы 7 освобождаются от нагрузок со стороны промежуточного кольца 3 и обоймы 1 за счет смещения клиновой полости и дополнительного вращения промежуточного кольца 3 в направлении эксцентрика 2. Подпружиненный дополнительный клин 11 перемещается внутри сепаратора 8, сжимая в пакет дискретные элементы 7 совместно с компенсирующими элементами 12, воздействующими на дискретные элементы 7 в радиальном направлении. Перемещение дискретных элементов 7 в радиальном направлении ограничивается сепаратором 8. При перемещении дискретные элементы 7 осуществляют вращение вокруг собственной оси, меняя контактные поверхности. Клин поддерживается в контакте с вершинами зубчатых поверхностей 9, 10 клиновой полости за счет сохранения своей формы в сепараторе 8 и действия пружины. При этом происходит только скольжение дискретных элементов 7 клина по вершинам зубчатых поверхностей 10 обоймы 1 и зубчатых поверхностей 9 промежуточного кольца 3. Наблюдается фаза выбега или свободного движения.
Конструкция механизма позволяет повысить нагрузочную способность за счет передачи полезного момента нормальными силами и автоматического перераспределения нагрузок среди дискретных элементов и компенсации погрешностей изготовления. Механизм позволяет повысить долговечность за счет улучшения условий свободного хода по сравнению с микрохраповыми, за счет безударного скольжения по поверхностям вершин зубьев, минуя впадины, и равномерного износа за счет постоянной смены контактных поверхностей, а также компенсации погрешностей и самоустановки под нагрузкой. Таким образом, повышается долговечность механизма и его нагрузочная способность.
Конструкция механизма технологична для различных типов машиностроительных производств.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
- средство, воплощающее заявленное изобретение при его осуществлении, относится к машиностроению, а именно к механизмам свободного хода, и может найти применение, в частности, в импульсных вариаторах и инерционно-импульсных приводах и устройствах;
- для заявленного изобретения, в том виде, как оно охарактеризовано в формуле изобретения, подтверждается возможность его осуществления с помощью известных в заявке средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить достижение усматриваемого заявителем технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2004 |
|
RU2279001C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1995 |
|
RU2115837C1 |
| УНИВЕРСАЛЬНАЯ МАШИНА ДЛЯ ЧИСТКИ ТРУБОПРОВОДОВ | 1999 |
|
RU2145528C1 |
| Клиновой механизм свободного хода | 1983 |
|
SU1160152A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2012 |
|
RU2490524C1 |
| ВЫПРЯМИТЕЛЬ МЕХАНИЧЕСКИХ ИМПУЛЬСНЫХ КОЛЕБАНИЙ | 2014 |
|
RU2563380C1 |
| Клиновой механизм свободного хода | 1981 |
|
SU966354A1 |
| Клиновой механизм свободного хода | 1986 |
|
SU1399541A1 |
| СЕКТОРНАЯ МУФТА СВОБОДНОГО ХОДА | 1996 |
|
RU2113642C1 |
Изобретение относится к области машиностроения, в частности к механизмам свободного хода, и может найти применение в импульсных вариаторах и для передачи полезного момента в одном направлении. Клиновой механизм свободного хода содержит обойму с внутренними зубчатыми поверхностями, эксцентрик, установленное на нем промежуточное кольцо с наружными зубчатыми поверхностями и возможностью дополнительного движения в направлении движения эксцентрика, кинематически связанное с обоймой, подпружиненный клин, размещенный в клиновой полости между промежуточным кольцом и обоймой, имеющий составные части, выполненные в виде размещенных в сепараторе дискретных элементов, опирающихся на зубчатые поверхности обоймы и промежуточного кольца. Новым является то, что в сепараторе установлен дополнительный подпружиненный клин с размещенными на его поверхностях компенсирующими элементами, взаимодействующими с дискретными элементами в направлении радиусов обоймы и промежуточного кольца. Сепаратор ограничивает перемещение дискретных элементов в радиальном направлении при свободном ходе. Техническим результатом является повышение нагрузочной способности и долговечности механизма. 3 ил.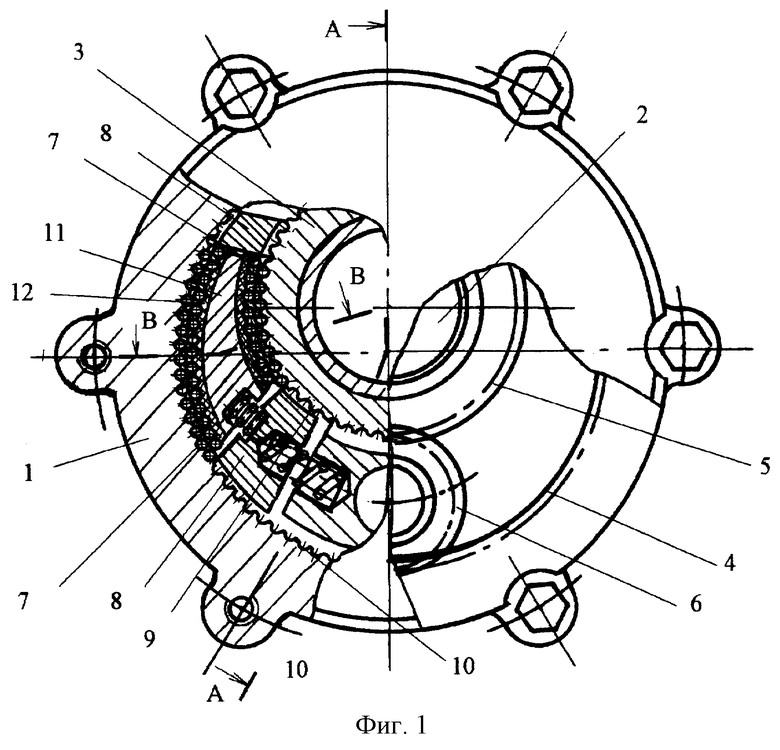
Клиновой механизм свободного хода, содержащий обойму с внутренними зубчатыми поверхностями, эксцентрик, установленное на нем промежуточное кольцо с наружными зубчатыми поверхностями и возможностью дополнительного движения в направлении движения эксцентрика, кинематически связанное с обоймой, подпружиненный клин, размещенный в клиновой полости между промежуточным кольцом и обоймой, имеющий составные части, выполненные в виде размещенных в сепараторе дискретных элементов, опирающихся на зубчатые поверхности обоймы и промежуточного кольца, отличающийся тем, что в сепараторе установлен дополнительный подпружиненный клин с размещенными на его поверхностях компенсирующими элементами, взаимодействующими с дискретными элементами в направлении радиусов обоймы и промежуточного кольца, а сепаратор ограничивает перемещение дискретных элементов в радиальном направлении при свободном ходе.
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| КЛИНОВАЯ МУФТА СВОБОДНОГО ХОДА | 1972 |
|
SU453513A1 |
| КОМБИНИРОВАННЫЙ СЪЕМНЫЙ ПРОТЕЗ. МЕТОД (ТЕХНИКА) ИЗГОТОВЛЕНИЯ ЦЕЛЬНОЛИТОГО МЕТАЛЛИЧЕСКОГО КАРКАСА ДЛЯ КОМБИНИРОВАННОГО СЪЕМНОГО ПРОТЕЗА | 2007 |
|
RU2382618C2 |
| DE 2913642 A1, 16.10.1980. | |||
