оо ;о со
СП
4
12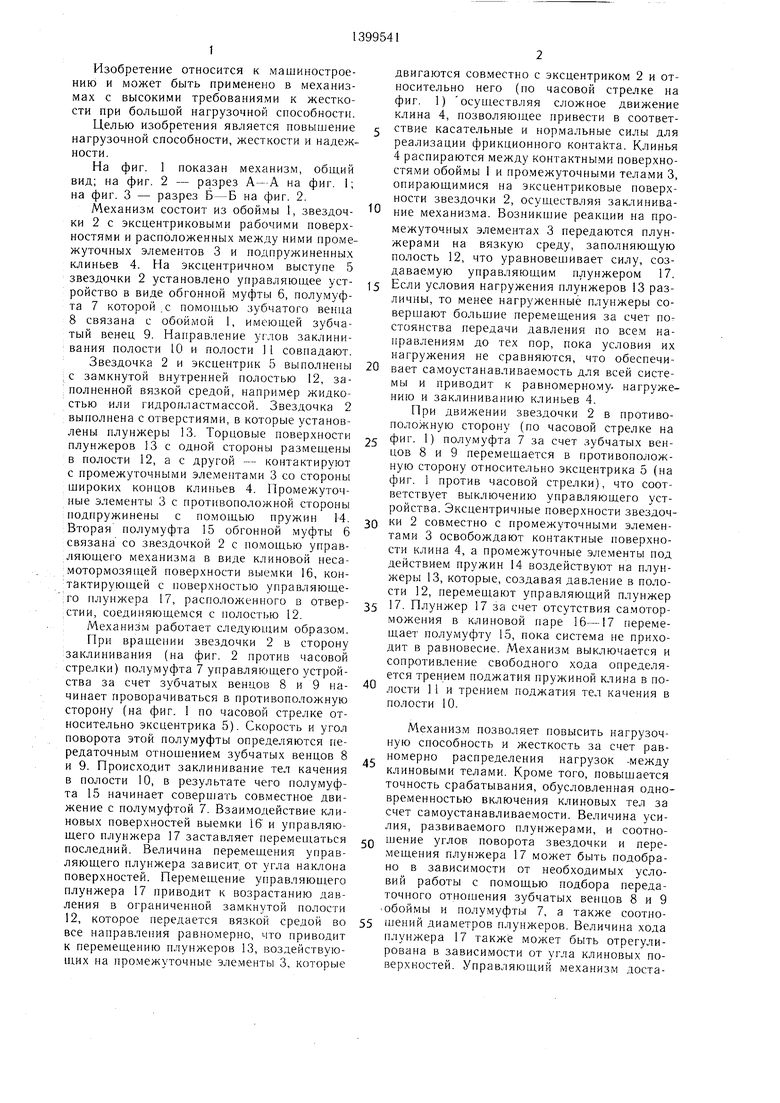
| название | год | авторы | номер документа |
|---|---|---|---|
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2004 |
|
RU2279001C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| Клиновой механизм свободного хода | 1981 |
|
SU966354A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| НЕФРИКЦИОННАЯ ЗУБЧАТО-ЭКСЦЕНТРИКОВАЯ ОБГОННАЯ МУФТА | 2022 |
|
RU2782057C1 |
| ВЫПРЯМИТЕЛЬ МЕХАНИЧЕСКИХ ИМПУЛЬСНЫХ КОЛЕБАНИЙ | 2014 |
|
RU2563380C1 |
| КЛИНОВАЯ МУФТА СВОБОДНОГО ХОДА | 2001 |
|
RU2221942C2 |
| ЗУБЧАТАЯ ОБГОННАЯ МУФТА | 2005 |
|
RU2298711C2 |
| ОБГОННАЯ МУФТА | 1992 |
|
RU2029148C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2012 |
|
RU2490524C1 |
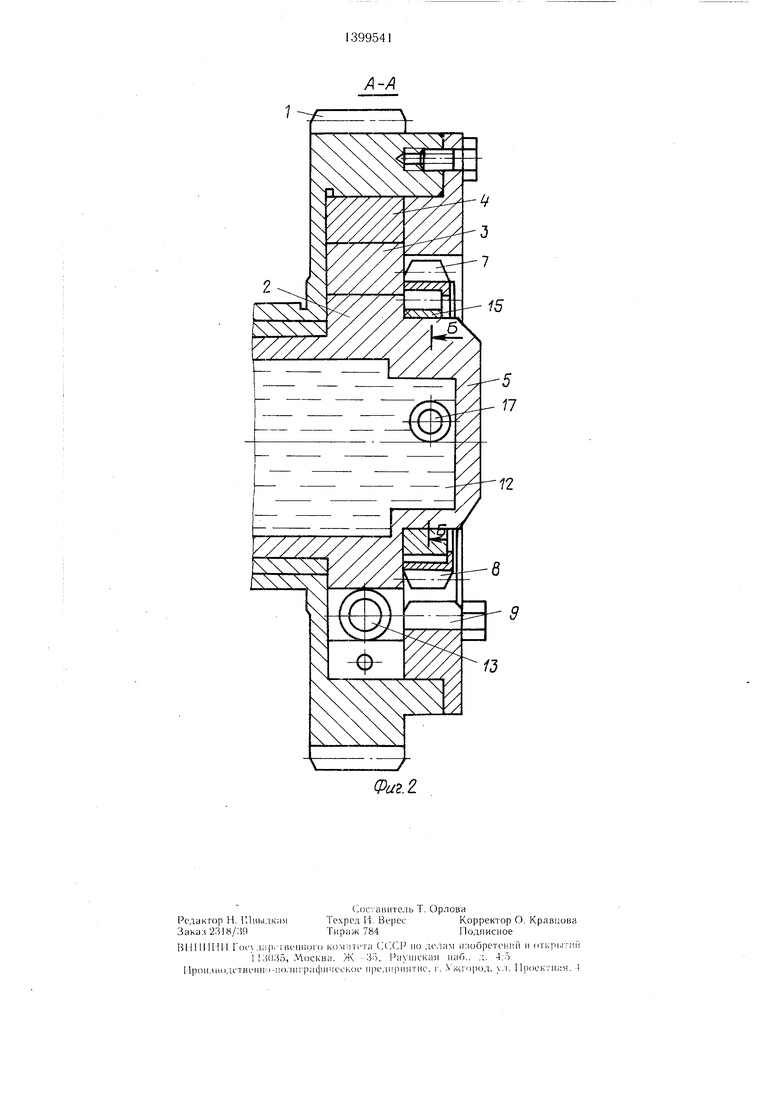
Изобретение относится к машиностроению и может быть использовано в механизмах для передачи враш,ения в одном направлении. Цель - повышение нагрузочной способности, жесткости и надежности. Механизм состоит из обоймы 1, звездочки 2 и расположенных между ними подпружиненных клиньев 4 и промежуточных элементов 3. На эксцентриковом выступе 5 звездочки 2 расположено управляюш,ее устройство в виде обгонной муфты, полумуфта (П) 7 которой связана зубчатым зацеплением с обоймой, а другая П связана со звездочкой посредством управляющего механизма. Звездочка 2 выполнена с полостью 12, заполненной вязкой жидкостью. При передаче враш,ения взаимодействие клиновых поверхностей управляющего плунжера и П 15 приводит к равномерному воздействию жидкости на плунжеры 13, которые воздействуют на промежуточные элементы 3 и заклинивают клинья 4. При врайле- нии механизма в противоположную сторону пружины отжимают промежуточные элементы,, происходит расклинивание. За счет передачи жидкостью равномерного давления на все клинья происходит их одновременное заклинивание. 3 ил. i (Л
фаг. 5
Изобретение относится к машиностроению и может быть применено в механизмах с высокими требованиями к жесткости при большой нагрузочной способности.
Целью изобретения является повышение нагрузочной способности, жесткости и надежности.
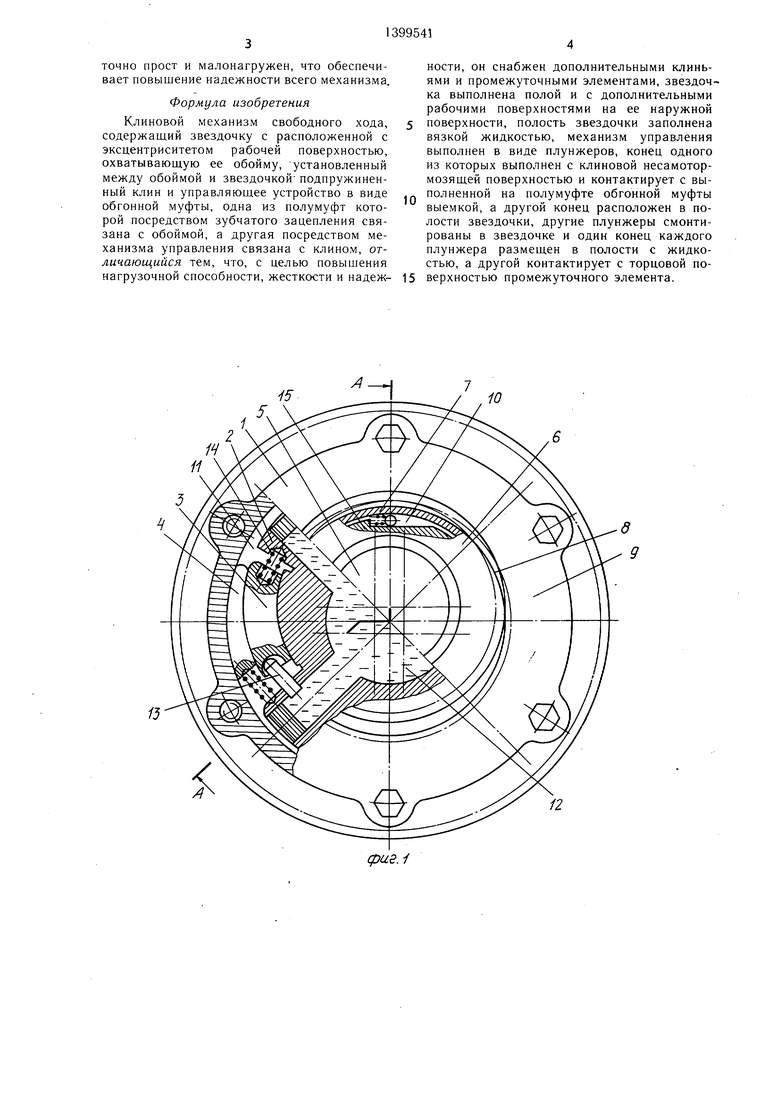
На фиг. 1 показан механизм, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Механизм состоит из обоймы 1, звездочки 2 с эксцентриковыми рабочими поверхностями и расположенных между ними промежуточных элементов 3 и подпружиненных клиньев 4. На эксцентричном выступе 5 звездочки 2 установлено управляющее устройство в виде обгонной муфты 6, полумуфта 7 которой ,с помощью зубчатого венца 8 связана с обоймой 1, имеющей зубчатый венец 9. Направление уг лов заклинивания полости 10 и полости 11 совпадают.
Звездочка 2 и эксцентрик 5 выполнены с замкнутой внутренней полостью 12, заполненной вязкой средой, например жидкостью или гидропластмассой. Звездочка 2 выполнена с отверстиями, в которые установлены плунжеры 13. Торцовые поверхности плунжеров 13 с одной стороны размещены в полости 12, а с другой - контактируют с промежуточными элементами 3 со стороны широких концов клиньев 4. Промежуточные элементы 3 с противоположной стороны подпружинены с помощью пружин 14. Вторая полумуфта 15 обгонной муфты 6 связана со звездочкой 2 с помощью управляющего механизма в виде клиновой неса- мотормозящей поверхности выемки 16, контактирующей с поверхностью управляющего плунжера 17, расположенного в отверстии, соединяющемся с полостью 12.
Механизм работает следуюпшм образом.
При вращении звездочки 2 в сторону заклинивания (на фиг. 2 против часовой стрелки) полумуфта 7 управляющего устройства за счет зубчатых венцов 8 и 9 начинает проворачиваться в противоположную сторону (на фиг. по часовой стрелке относительно эксцентрика 5). Скорость и угол поворота этой полумуфты определяются передаточным отношением зубчатых венцов 8 и 9. Происходит заклинивание тел качения в полости 10, в результате чего полумуфта 15 начинает совершать совместное движение с полумуфтой 7. Взаимодействие клиновых поверхностей выемки 16 и управляющего плунжера 17 заставляет перемещаться последний. Величина перемещения управляющего плунжера зависит от угла наклона поверхностей. Перемещение управляющего плунжера 17 приводит к возрастанию давления в ограниченной замкнутой полости 12, которое передается вязкой средой во все направления равномерно, что приводит к перемещению плунжеров 13, воздействующих на про.межуточные элементы 3, которые
двигаются совместно с эксцентриком 2 и относительно него (по часовой стрелке на фиг. 1) осуществляя сложное движение клина 4, позволяю дее привести в соответствие касательные и нормальные силы для реализации фрикционного контакта. Клинья 4 распираются между контактными поверхностями обоймы 1 и промежуточными телами 3, опирающимися на эксцентриковые поверхности звездочки 2, осуществляя зак тинивание механизма. Возникшие реакции на промежуточных элементах 3 передаются плунжерами на вязкую среду, заполняющую полость 12, что уравновешивает силу, создаваемую управляющим плунжером 17.
5 Если условия нагружения плунжеров 13 различны, то менее нагруженные плунжеры совершают большие перемещения за счет постоянства передачи давления по все.м направлениям до тех пор, пока условия их нагружения не сравняются, что обеспечи0 вает самоустанавливаемость для всей системы и приводит к равномерно.му. нагруже- нию и заклиниванию клиньев 4.
При движении звездочки 2 в противоположную сторону (по часовой стрелке на
5 фиг. 1) полумуфта 7 за счет зубчатых венцов 8 и 9 перемещается в противополож- сторону относительно эксцентрика 5 (на фиг. 1 против часовой стрелки), что соответствует выключению управляющего устройства. Эксцентричные поверхности звездоч0 2 совместно с промежуточными элементами 3 освобождают контактные поверхности клина 4, а промежуточные элементы под действием пружин 14 воздействуют на плунжеры 13, которые, создавая давление в полости 12, перемещают управляющий плунжер
5 17. Плунжер 17 за счет отсутствия самоторможения в клиновой паре 16-17 перемещает полумуфту 15, пока система не приходит в равновесие. Механизм выключается и сопротивление свободного хода определяется трением поджатия пружиной клина в по лости 11 и трением поджатия тел качения в полости 10.
Механизм позволяет повысить нагрузочную способность и жесткость за счет рав- номерно распределения нагрузок -между клиновыми телами. Кроме того, повыщается точность срабатывания, обусловленная одновременностью включения клиновых тел за счет самоустанавливаемости. Величина усилия, развиваемого плунжерами, и соотноQ шение углов поворота звездочки и перемещения плунжера 17 может быть подобрано в зависимости от необходимых условий работы с помощью подбора передаточного отношения зубчатых венцов 8 и 9 -обоймы и полумуфты 7, а также соотно5 1пений диаметров плунжеров. Величина хода плунжера 17 также может быть отрегулирована в зависи.мости от угла клиновых поверхностей. Управляющий механизм достаточно прост и малонагружен, что обеспечивает повышение надежности всего механизма,
Формула изобретения
Клиновой механизм свободного хода, содержащий звездочку с расположенной с эксцентриситетом рабочей поверхностью, охватывающую ее обойму, установленный между обоймой и звездочкой подпружиненный клин и управляющее устройство в виде обгонной муфты, одна из полумуфт которой посредством зубчатого зацепления связана с обоймой, а другая посредством механизма управления связана с клином, отличающийся тем, что, с целью повышения нагрузочной способности, жесткости и надеж5.
i5
14
ности, он снабжен дополнительными клиньями и промежуточными элементами, звездочка выполнена полой и с дополнительными рабочими поверхностями на ее наружной
поверхности, полость звездочки заполнена вязкой жидкостью, механизм управления выполнен в виде плунжеров, конец одного из которых выполнен с клиновой несамотор- мозящей поверхностью и контактирует с выполненной на полумуфте обгонной муфты выемкой, а другой конец расположен в полости звездочки, другие плунжеры смонтированы в звездочке и один конец каждого плунжера размещен в полости с жидкостью, а другой контактирует с торцовой поверхностью промежуточного элемента.
10
12
(fius.i
| Клиновой механизм свободного хода | 1984 |
|
SU1214954A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
