Изобретение относится к машиностроению и может быть использовано для обеспечения передачи вращения в одном направлении.
Известен клиновой механизм свободного хода, содержащий вал с эксцентриком, обойму и заклинивающее устройство в виде установленного на цапфе эксцентрика промежуточного кольца, расположенного между обоймой и подпружиненным клином (а.с. SU №302525, МПК F16D 41/06, опубл. 28.04.1971, Бюл. №15).
Недостатки данного клинового механизма свободного хода: низкая нагрузочная способность, большой угол срабатывания из-за периодической потери контакта рабочих поверхностей клина и обоймы.
Известен также клиновой механизм свободного хода, содержащий обойму, эксцентрик, свободно установленное на нем промежуточное кольцо, кинематически связанное с обоймой, и подпружиненный клин трапециедальной формы, размещенный в клиновой полости между промежуточным кольцом и обоймой, причем длина контактной линии в поперечном сечении клина обратно пропорциональна его толщине в том же сечении (а.с. SU №1160152, МПК4 F16D 41/06, опубл. 07.06.1985, Бюл. №21) - прототип.
Недостатком данного клинового механизма свободного хода является большой мертвый ход из-за перекладки зазоров и нестабильное срабатывание при высокой частоте включения.
Технический результат - увеличение нагрузочной способности, уменьшение мертвого хода и повышение стабильности работы.
Указанный технический результат достигается тем, что в клиновом механизме свободного хода, содержащем обойму с зубчатым венцом, эксцентрик, свободно установленное на нем промежуточное кольцо, кинематически связанное с обоймой, и подпружиненный клин, размещенный в клиновой полости между промежуточным кольцом и обоймой, последняя выполнена из двух частей, соединенных через упругую связь с возможностью относительного поворота так, что зубчатые венцы обеих частей являются продолжением друг друга, при этом плоскость сопряжения частей обойм совпадает с плоскостью симметрии клина и промежуточного кольца, а наружные рабочие поверхности клина и взаимодействующие с ними рабочие поверхности обеих частей обоймы в поперечном сечении выполнены под углом относительно плоскости симметрии клина не меньше двойного угла трения между материалами указанных деталей.
Такое выполнение позволяет увеличить нагрузочную способность за счет совпадения плоскости симметрии клина и плоскости сопряжения частей обоймы и увеличенной площади наружных рабочих поверхностей клина и взаимодействующих с ними рабочих поверхностей обеих частей обоймы, а упругая связь последних обеспечивает выборку зазоров, что сказывается на уменьшении мертвого хода и повышении стабильности работы.
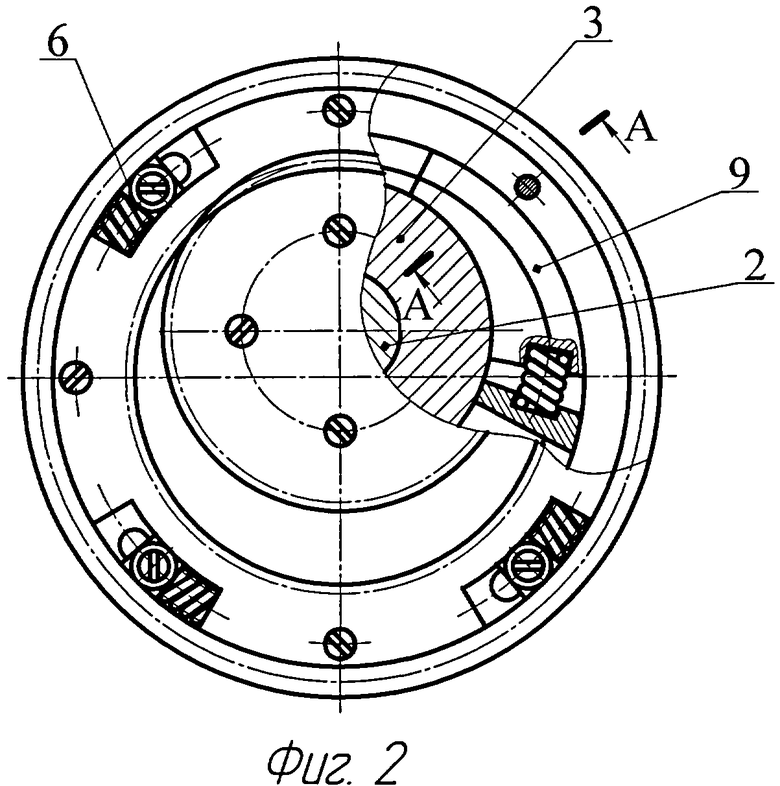
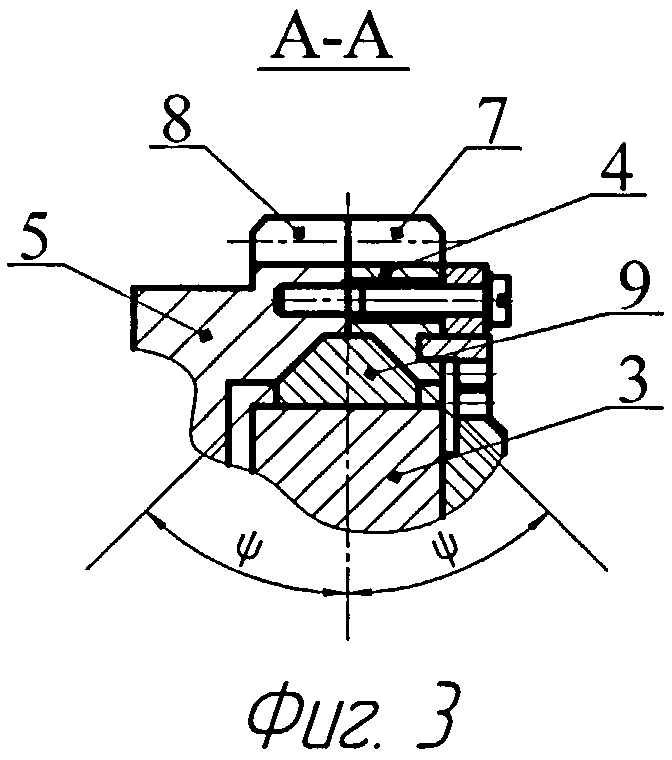
На фиг.1 изображен клиновой механизм свободного хода, вид спереди, в разрезе; на фиг.2 - вид сбоку; на фиг.3 - разрез А-А на фиг.2.
Клиновой механизм свободного хода содержит ведущий вал 1 с эксцентриком 2, на котором подвижно установлено промежуточное кольцо 3, кинематически связанное с обоймой, состоящей из двух частей 4 и 5. Последние соединены между собой через упругую связь 6 так, что зубчатый венец 7 одной части 4 является продолжением зубчатого венца 8 другой 5, а плоскость сопряжения частей обоймы 4 и 5 совпадает с плоскостью симметрии промежуточного кольца 3 и взаимодействующего с ним клина 9. В свою очередь, клин 9 имеет наклонные к его плоскости симметрии рабочие поверхности, взаимодействующие с наклонными к той же плоскости рабочими поверхностями частей 4 и 5 обоймы, причем угол ψ наклона не меньше, чем двойное значение угла трения между материалами указанных деталей.
Клиновой механизм свободного хода работает следующим образом.
При вращении ведущего вала 1 с эксцентриком 2 по часовой стрелке промежуточное кольцо 3, установленное на эксцентрике 2, затягивает клин 9 в клиновую полость. При этом наружные рабочие поверхности клина 9 взаимодействуют с рабочими поверхностями сразу обеих частей 4 и 5 обоймы с равным усилием, это обеспечено увеличенной площадью контакта и совпадением плоскости симметрии клина 9 и плоскости сопряжения частей 4 и 5 обоймы, что приводит к заклиниванию. Дальнейшее движение возможно только совместно с частями 4 и 5 обоймы, которые через зубчатые венцы 7 и 8 передают вращение далее. Вращение ведущего вала 1 с эксцентриком 2 против часовой стрелки приводит к уменьшению давления промежуточного кольца 3 на клин 9, а кинематическая связь с частями 4 и 5 обоймы обеспечивает перемещение клина 9 вслед за ведущим валом по наклонным рабочим поверхностям, причем высвобождение клина гарантировано углом ψ наклона рабочих поверхностей не меньшем, чем двойное значение угла трения между материалами указанных деталей, что обеспечивает мгновенное расклинивание. При смене направления вращения ведущего вала выборка зазоров осуществляется посредством относительного поворота частей 4 и 5 обоймы за счет упругой связи 6.
Таким образом, в предлагаемом клиновом механизме свободного хода простыми средствами достигается: увеличение нагрузочной способности, уменьшение мертвого хода и повышение стабильности работы механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клиновой механизм свободного хода | 1982 |
|
SU1057714A1 |
| ВЫПРЯМИТЕЛЬ МЕХАНИЧЕСКИХ ИМПУЛЬСНЫХ КОЛЕБАНИЙ | 2014 |
|
RU2563380C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| Клиновой механизм свободного хода | 1983 |
|
SU1160152A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2004 |
|
RU2279001C1 |
| Клиновой механизм свободного хода | 1981 |
|
SU966354A1 |
| Клиновой механизм свободного хода | 1985 |
|
SU1260579A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| Клиновой механизм свободного хода | 1974 |
|
SU497431A1 |
| Клиновой механизм свободного хода | 1980 |
|
SU962690A1 |
Изобретение относится к машиностроению и может быть использовано для обеспечения передачи вращения в одном направлении. Клиновой механизм свободного хода содержит ведущий вал с эксцентриком, на котором подвижно установлено промежуточное кольцо, кинематически связанное с обоймой, состоящей из двух частей. Последние соединены между собой через упругую связь так, что зубчатый венец одной части является продолжением зубчатого венца другой части, а плоскость сопряжения частей обоймы совпадает с плоскостью симметрии промежуточного кольца и взаимодействующего с ним клина. Клин имеет наклонные к его плоскости симметрии рабочие поверхности, взаимодействующие с наклонными к той же плоскости рабочими поверхностями частей обоймы, причем угол наклона выполнен не меньше двойного угла трения между материалами указанных деталей. Техническим результатом является увеличение нагрузочной способности, уменьшение мертвого хода и повышение стабильности работы механизма. 3 ил.
Клиновой механизм свободного хода, содержащий обойму с зубчатым венцом, эксцентрик, свободно установленное на нем промежуточное кольцо, кинематически связанное с обоймой, и подпружиненный клин, размещенный в клиновой полости между промежуточным кольцом и обоймой, отличающийся тем, что обойма выполнена из двух частей, соединенных через упругую связь с возможностью относительного поворота так, что зубчатые венцы обеих частей обоймы являются продолжением друг друга, при этом плоскость сопряжения частей обоймы совпадает с плоскостью симметрии клина и промежуточного кольца, а наружные рабочие поверхности клина и взаимодействующие с ними рабочие поверхности обеих частей обоймы в поперечном сечении выполнены под углом относительно плоскости симметрии клина не меньше двойного угла трения между материалами указанных деталей.
| Клиновой механизм свободного хода | 1983 |
|
SU1160152A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| Клиновой механизм свободного хода | 1988 |
|
SU1610118A1 |
| US 3447650 A, 03.06.1969. | |||

