Предпосылки изобретения
Изобретение касается устройства контроля и управления для машинного агрегата, предназначенного для выполнения операции намотки по меньшей мере одного проволочного элемента на основной кабель для получения обмотанного кабеля, причем упомянутый машинный агрегат снабжен рабочими органами, содержащими
- наматывающую головку, которая направляет упомянутый проволочный элемент, намотанный по меньшей мере на одну подающую катушку,
- первый двигатель головки для приведения во вращение наматывающей головки,
- второй двигатель для приведения во вращение приемной катушки, на которую наматывается упомянутый обмотанный кабель,
- средство для механического натяжения проволочного элемента, когда происходит фаза намотки,
упомянутое устройство контроля и управления, содержащее
- оптический измерительный прибор, содержащий по меньшей мере один световой излучатель для проецирования светового пучка на проволочный элемент, и приемник для восприятия отраженного светового пучка с получением сигнала измерения,
- схему обработки данных с микропроцессором, предназначенным для приема упомянутого сигнала измерения и передачи на упомянутые рабочие органы сигналов управления и/или регулирования,
- средство внешнего управления, содержащее в частности микрокомпьютер для ввода параметров автоматической операции машинного агрегата в соответствии с заданной программой схемы обработки данных.
Настоящее изобретение относится в целом к машинному агрегату, предназначенному для выполнения операции намотки по меньшей мере одного проволочного элемента. Более конкретно, изобретение относится к устройству контроля и управления с выборкой данных в реальном времени для такого машинного агрегата.
Изобретение может применяться, например, для машинного агрегата, предназначенного для намотки вместе проволочных элементов один на другой или один с другим, и также может применяться для машинного агрегата, предназначенного для намотки одного или более периферийных проволочных элементов на центральный кабель. Эти элементы могут быть металлическими или состоящими из других материалов.
В дальнейшем в тексте под термином "проволочный элемент" будет пониматься любой объект в форме кабеля или проволоки, поперечное сечение которого может иметь любую форму (проволочный элемент может быть, например, тонкой лентой), но в большинстве случаев он приблизительно круговой обычной формы, постоянной по всей его длине. Такой проволочный элемент может составлять простой проволочный объект, выполняющий, по существу, механическую функцию (например, арматурная проволока или изолирующая или защитная лента) или может составлять кабель, включающий одну или несколько проволок, осуществляющих передачу энергии или сигналов в электрическом, магнитном, оптическом или любом другом виде.
В дальнейшем в тексте под термином "центральный кабель" будет пониматься любой проволочный элемент, как он определен выше, но жесткость или прочность на растяжение которого в обычных условиях относительно высока для того, чтобы другой проволочный элемент мог бы наматываться вокруг этого центрального проволочного элемента.
В дальнейшем в тексте под термином "периферийный проволочный элемент" будет пониматься любой проволочный элемент, как он определен выше, но жесткость которого в обычных условиях ниже, чем жесткость центрального проволочного элемента, так что периферийный проволочный элемент может наматываться вокруг центрального кабеля.
Однако центральный кабель с более низкой жесткостью, чем жесткость периферийного проволочного элемента, также может быть предусмотрен, не выходя за рамки сущности изобретения, в котором центральный кабель держится с достаточно высоким натяжением для него, однако чтобы можно было бы наматывать периферийный проволочный элемент вокруг этого центрального кабеля.
В дальнейшем в тексте под термином "операция намотки" будет пониматься любая операция, выполненная устройством согласно настоящему изобретению, предназначенная для обеспечения намотки по меньшей мере одного проволочного элемента на по меньшей мере другой проволочный элемент, или с по меньшей мере другим проволочным элементом, или на центральный кабель.
В качестве таких возможных операций намотки можно привести следующие примеры:
- нахлест, т. е. намотка на центральный кабель проволочного элемента последовательными витками, которые могут быть соединены или в общем случае не соединены.
- скрутка, т. е. намотка нескольких проволочных элементов с предварительно определенным шагом намотки (расстояние, измеренное на центральном кабеле, между началом и концом витка, имеющего одну и ту же точку отсчета на окружности кабеля в начале и конце витка).
- навивка, покрытие центрального кабеля одной или несколькими лентами,
- операция, состоящая в создании плетения вокруг центрального кабеля, причем это плетение формируется с помощью нескольких плоских лент, а плоская лента образована несколькими проволочными элементами или индивидуальными проволочными элементами, намотанными вокруг центрального кабеля и чередующимися друг с другом, образовывая один или более слоев плетения вокруг центрального кабеля, особенно для выполнения коаксиального кабеля. Плетение может образовываться путем сцепления нескольких плоских лент, образованных несколькими проволочными элементами. Такое плетение может быть использовано, например, для образования экранирующей оболочки для центрального кабеля или для любой другой защиты центрального кабеля,
- плетение, выполненное "само по себе", т.е. без образования покрытия вокруг центрального кабеля, а так, чтобы образовывался твердый шнур или полый шнур.
В дальнейшем в тексте под термином "машинный агрегат" будет пониматься любая установка, которая способна выполнять такие возможные операции намотки, даже если вместо комплекса операций эти установки выполняют только собственно плетение, навивку, скрутку, нахлест или операцию, им подобную.
Описание уровня техники
Документ WO 93/07330 и документ FR-A 2739701 описывают устройства для выполнения операции намотки по меньшей мере одного проволочного элемента, содержащие оптическое средство, обеспечивающее следующие измерения, которые выполняются во время операции намотки
- измерение интенсивности отражения падающего светового пучка на натянутом проволочном элементе, вытянутом между наматывающей головкой и местом самой намотки;
- измерение амплитуды колебаний угла зеркального отражения падающего светового луча на натянутом проволочном элементе, вытянутом между наматывающей головкой и местом самой намотки, причем эта амплитуда колебаний характеризует натяжение проволочного элемента в ходе намотки;
- выполнение на натянутом проволочном элементе, вытянутом между наматывающей головкой и местом самой намотки, одного из упомянутых выше измерений только в определенном временном окне с помощью средства непрерывного определения углового положения наматывающей головки, для выбора одного конкретного проволочного элемента, на котором проводится это измерение;
- измерение на натянутом проволочном элементе, вытянутом между наматывающей головкой и местом самой намотки, наличия/отсутствия интенсивности отражения падающего светового пучка для непрерывного измерения углового положения наматывающей головки.
в этих документах, известных из уровня техники, используется оптический узел, предназначенный для подачи светового пучка на проволочный элемент и для выполнения соответствующих оптических измерении на отраженном свете, а также электронное средство, которое принимает сигналы, поступающие из оптического узла и дополнительные сигналы, поступающие из измерительных элементов, для получения требующихся данных по работе установки или для выполнения автоматической регулировки рабочих параметров установки.
Проблема, возникающая для этого типа машинного агрегата, известного из уровня техники, состоит в том, что в случае автоматической работы требуется выполнение следующих операций:
- выбор и приспособление конкретного типа оптического измерительного устройства к установке, чтобы характеристики устройства были совместимы с типом используемого проволочного элемента,
- выбор и приспособление к установке конкретного типа компонента, предназначенного для передачи мощности, чтобы характеристики этого компонента были совместимы с типом функциональной аппаратуры, которая предназначена для автоматического управления,
- набор и приспособление конкретного устройства к установке, которое обеспечивает работу компонента передачи мощности во время работы установки, когда отключается начальное ручное управление функциональной аппаратурой машинного агрегата, и в котором этот компонент имеет автоматическое управление, и отключение этого компонента, когда осуществляется оперативное исходное ручное управление, когда оператор хочет выполнять ручное управление этой функциональной аппаратурой вместо автоматического управления.
Условия технологического процесса могут значительно изменяться по следующим причинам:
- существующие агрегаты глобально представляют довольно большой объем установок, но которые включают большое разнообразие типов установок (например, установки с вертикальной или горизонтальной осью, установки для намотки одной нити или для намотки большого числа нитей, установки с автоматическим или ручным управлением);
- для установок конкретного типа могут выполняться операции намотки различных типов (например, скрутка, нахлест, навивка или плетение);
- для конкретной операции намотки могут обрабатываться проволочные элементы очень различной природы (например, определенные проволоки являются очень хорошо отражающими, а другие имеют очень низкое отражение, определенные проволоки толстые, а другие очень тонкие, например несколько микрон).
Условия окружающего освещения установки могут изменяться в значительной степени в течение дня"(например, когда установка переключается с нормального искусственного освещения в ночное время на непосредственно солнечное освещение через окно во время светового дня), а также могут изменяться в большой степени мгновенно (например, когда искусственное освещение производственного участка включается или выключается).
Эти наблюдения приводят к необходимости создания устройства контроля и управления с функциями выборки данных, поступающих в реальном времени, которое может подходить для машинного агрегата с любым рабочим циклом.
Цель изобретения
Целью настоящего изобретения является создание устройства контроля и управления в реальном времени для универсального машинного агрегата, которое может быть использовано при нескольких типах операций и при различных режимах намотки.
Устройство контроля и управления согласно изобретению характеризуется тем, что
- микропроцессор схемы обработки данных принимает и осуществляет выборку данных, поступающих из оптического измерительного прибора, для определения положения проволочного элемента и его поведения при механическом колебании в реальном времени до того, как проволочный элемент наматывается на основной кабель,
- запоминающее устройство, а именно стираемое программируемое постоянное запоминающее устройство (СППЗУ - EPROM), программируется для генерации функции самокоррекции возникающего отклонения для данных по положению и колебанию проволочного элемента,
- а электрические средства управления первого двигателя, второго двигателя и механическое средство натяжения выполняются так, чтобы переустанавливать оптимум работы машинного агрегата.
Согласно предпочтительному варианту реализации изобретения электрические средства управления управляются в реальном масштабе времени с помощью микропроцессора для регулировки синхронизации между первым двигателем наматывающей головки и вторым двигателем приемной катушки, натягивающей основной кабель, и установки заданного механического натяжения на проволочном элементе с помощью по меньшей мере одного электромагнитного тормоза. Схема обработки данных запоминает значения максимальных, минимальных и средних колебаний проволочного элемента после выборки данных, для наблюдения в реальном масштабе времени колебательного поведения и позиционирования упомянутого проволочного элемента на экране микрокомпьютера, при этом резидентная программа СППЗУ обеспечивает, чтобы машинный агрегат был "заблокирован" по положению и колебанию проволочного элемента относительно основного кабеля.
Согласно одному из признаков изобретения вспомогательные датчики окружающей температуры и/или влажности соединены со схемой обработки данных для предоставления информации, должно ли возникнуть смещение проволочного элемента, связанное с изменением параметров окружающей среды.
Согласно другому признаку изобретения излучатель и приемник оптического измерительного прибора снабжены средствами регулировки наклона для регулировки поля излучения и приема светового пучка, взаимодействующего с проволочным элементом.
Краткое описание чертежей
Другие преимущества и особенности изобретения станут более понятными из последующего описания варианта осуществления изобретения, представленного только в качестве примера, но не ограничивающего изобретение, вместе с прилагаемыми чертежами, на которых
фиг. 1 представляет схематичное изображение машинного агрегата, оснащенного устройством контроля и управления с выборкой данных, поступающих в реальном времени, согласно изобретению;
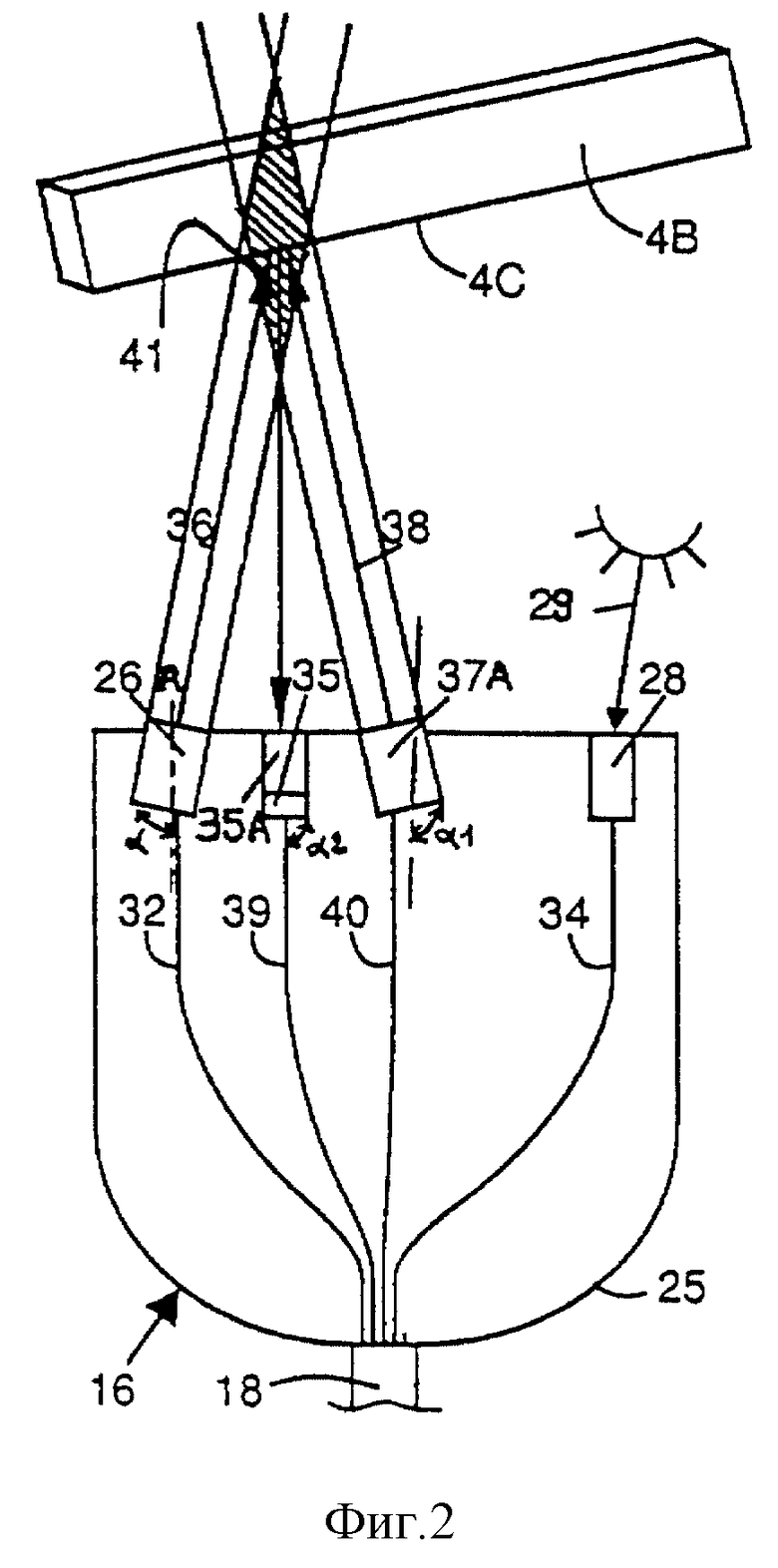
фиг. 2 - поперечное сечение оптического измерительного датчика, составляющего один из элементов устройства на фиг. 1;
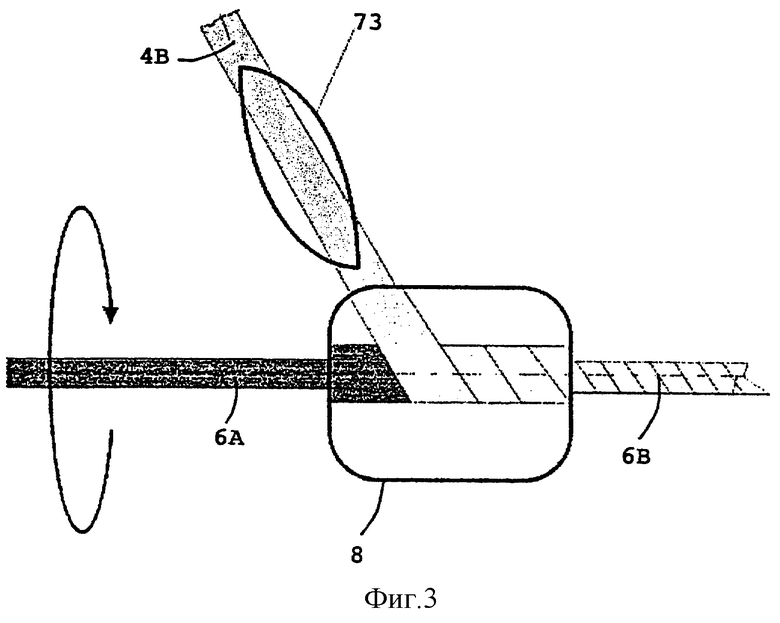
фиг. 3 представляет зону контроля процесса намотки в увеличенном масштабе;
фиг.4 представляет блок-схему электронной схемы обработки данных устройства контроля и управления;
фиг. 5 и 6 соответственно иллюстрируют измеряемые диаграммы максимальных и минимальных колебаний проволочных элементов для различных значений механического натяжения;
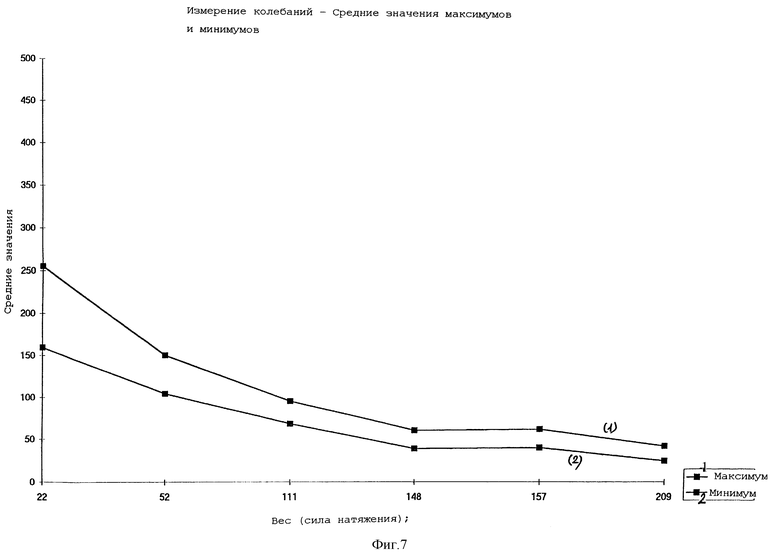
фиг.7 показывает две кривые 1 и 2, представляющие средние значения максимальных и минимальных колебаний в зависимости от механического натяжения, прикладываемого к проволочному элементу.
Описание предпочтительного варианта
На фиг.1: машинный агрегат 15 содержит наматывающую головку 50, снабженную эксцентриковым роликом 51, который направляет проволочный элемент 4 или 4А, намотанный на первую подающую катушку 52 или вторую подающую катушку 52А, обе замедляются с помощью электромагнитного тормоза 53F и 53А соответственно. Третья подающая катушка 54 поддерживает намотанный основной кабель 6, свободный конец жилы 6А которого вытянут от катушки 54 к приемной катушке 55, которая приводится в движение двигателем 56М, и проходит натянутым через наматывающую головку 40 соосно. Свободный конец нити 4В проволочного элемента 4 или 4А вытянут от ролика 51 в зону 8 нити кабеля 6А, причем эта зона расположена между наматывающей головкой 50 и приемной катушкой 55. Двигатель 57М головки приводит во вращение наматывающую головку 50 через подходящую передачу 58. Такая установка описана подробно в документе FR-A-2739701.
Преобразователь 59 скорости и углового положения в код измеряет скорость и угловое положение наматывающей головки 50. Во время работы проволочный элемент или элементы 4 или 4А наматываются на центральный кабель 6 для получения обмотанного, объединенного, скрученного кабеля 6В, который затем наматывается на приемную катушку 55. Устройство 15 контроля и управления с выборкой данных, поступающих в реальном времени (ограничено пунктирными линиями), содержит
- оптический измерительный прибор 16, предназначенный для получения оптических сигналов измерения и размещенный так, чтобы лицевая сторона была обращена на конец нити 4В,
- схема 17 обработки данных, которая принимает сигналы измерения из оптического измерительного прибора 16 через кабель 18,
- средство 20 внешнего управления, например микрокомпьютер, который позволяет оператору управлять по меньшей мере одним параметром автоматической работы машинного агрегата путем управления программируемой работой схемы 17 обработки данных через кабель 21.
Выход схемы 17 соединен с вариатором 56V двигателя 56М через ветвь кабеля 64А, а вход схемы 17 соединен с соответствующим управлением 63 через ветвь кабеля 64В.
Другой выход схемы 17 соединен с источником 53С питания тормоза 53 F через ветвь кабеля 66А, а вход соединен; с управлением 65 через кабель 66В, чтобы управлять двигателем 53G первой подающей катушки 52, создающим вращающий момент.
Другой выход схемы 17 соединен с вариатором 57 V двигателя 57М через ветвь кабеля 62А, а вход соединен с соответствующим блоком управления 61 через ветвь кабеля 62В.
Вход схемы 17 соединен с преобразователем 59 через
ветвь кабеля 68А, а выход соединен с соответствующим средством 67 индикации через ветвь кабеля 68В.
Тогда компьютер 20 работает как средство управления вообще
- для управления двигателями 56М и 57М через вариаторы 56V и 57V,
- для управления тормозами 53А, 53F или двигателем 53G, который работает на создание вращающего момента,
- для контроля скорости и углового положения наматывающей головки 50 через преобразователь 59,
- для индикации значения оптического измерительного прибора 16,
- и/или для обработки, вычислений или индикации любых других данных.
На фиг. 2: оптический измерительный прибор 16 содержит оптический корпус 25, включающий средство проецирования для проецирования светового пучка с помощью инфракрасных излучателей 26А и 37А, датчик 28 света окружающей среды и светоприемник 35.
Средство проецирования содержит первый инфракрасный излучатель 26А и второй инфракрасный излучатель 37А, которые проецируют два световых пучка 36 и 38, имеющих точные исходные угловые отклонения α и α1, обеспечивающие пересечение 41 на определенном расстоянии.
Приемник 35 инфракрасного излучения размещен внутри трубки 35А и измеряет свет, отраженный проволочным элементом 4В. Приемник 35 позволяет измерять отраженный свет не в зеркальной конфигурации и поэтому он может работать
- как детектор наличия/отсутствия проволоки,
- как непрерывной аналоговый измеритель характеристики отражения проволоки (например, изменение яркости проволоки или изменение цвета проволоки), для осуществления непрерывного контроля качества проволоки,
- как высокочувствительные датчики с очень быстрым откликом в случае, если проволока становится чрезмерно тонкой или очень темной, чтобы выявлять точным образом во времени появление проволочного элемента 4В в поле инфракрасных пучков 36 и 38.
Проволоки 32, 40, подсоединенные внутри корпуса 25 к излучателям 26А, 37А, проволока 39, подсоединенная к приемнику 35, а также проволока 34, подсоединенная к датчику 28, - все они покрыты оболочкой в кабеле 18.
Излучатели 26А, 37А света 10 оптического измерительного прибора 16 могут иметь различные длины волн излучения и различные мощности излучения. Угол α, α1 наклона излучателей 26А, 37А может регулироваться для увеличения или уменьшения расстояния от зоны 41 пересечения. Угол наклона α2 приемника 35 излучения также является регулируемым для модификации зоны приема.
Выбор типа излучателей 26А, 37А и фотоприемника 35 зависит от характеристик отражательной способности проволочного элемента 4 и от типа измерения, которое должно осуществляться.
На фиг.3 показана в увеличенном масштабе зона контроля в реальном времени процесса навивки. Оптический измерительный прибор 16 позволяет контролировать степень колебания 73 навиваемой ленты проволочного элемента 4В до того, как выполняется ее намотка на нить 6А основного кабеля 6. Анализ колебания с помощью схемы 17 обработки данных позволяет регулировать за счет тормоза 53F механическое натяжение, которому подвергается эта лента. Точка намотки также контролируется с помощью оптического измерительного прибора 16 в зоне 8 для получения оптимальной точности расположения витков, когда рассматривается нахлест и шаг витков, и для выявления любых изгибов или переворотов ленты.
На фиг.4: электронная схема 17 обработки данных содержит микропроцессор 75, предназначенный для приема данных в реальном масштабе времени из датчика 16 и работающий в сочетании с микрокомпьютером средства 20 внешнего управления для ввода данных и параметров в соответствии с требующимися рабочими условиями. Микропроцессор 75 также подключен к постоянному запоминающему устройству ПЗУ 77, к оперативному запоминающему устройству ОЗУ 78 и к стираемому программируемому постоянному запоминающему устройству (СППЗУ) 80, которое имеет резидентную программу, которая генерирует функцию самокоррекции наблюдаемого смещения (положения или колебания проволочного элемента) путем воздействия на активные компоненты (тормозы 53А проволочного элемента 4А, синхронизация двигателей 56М, 57М и др.).
Выборка данных в реальном времени с помощью датчика 16 позволяет знать положение проволочного элемента 4 и его поведение относительно его максимального колебания.
На диаграммах фиг. 5 и 6 показано поведение проволочного элемента 4 в зависимости от значения механического натяжения, определяемого тормозом 53F.
Обозначение SV-22G на диаграмме А соответствует натяжению в 22 грамма, приложенному к проволочному элементу 4. На фиг. 5 показано максимальное значение колебания, а фиг. 6 иллюстрирует минимальное значение после выборки данных, выполненной с помощью схемы 17 обработки данных.
Другие диаграммы В, С, D, Е и F соответствуют большим механическим натяжениям, а именно 52 грамма для варианта, обозначенного SV-52G, 111 граммов для варианта, обозначенного SV-111G, 148 граммов для варианта, обозначенного SV-148G, 157 граммов для варианта, обозначенного SV-157G, и 209 граммов для варианта, обозначенного SV-209G.
На фиг.7 показано, что среднее значение колебания, наблюдаемого на проволочном элементе 4, подвергающемся натяжению в 22 грамма (SV-22G), составляет 260 точек. Разница между максимумом и минимумом уменьшается после того, как натяжение было увеличено, и становится почти постоянным между 148 грамм и 209 грамм.
Это наблюдение в реальном времени поведения проволочного элемента 4 позволяет очень быстро корректировать работу машинного агрегата. Положение проволочного элемента 4 по отношению к нити основного кабеля 6 также известно на протяжении всего времени.
Работа машинного агрегата может выполняться в двух различных режимах:
1/ Ручной режим
Он позволяет регулировать положение проволочного элемента 4 машинного агрегата так, чтобы он находился в точном месте на опоре основного кабеля 6.
Регулируются:
- синхронизация между наматывающей головкой 50 проволочного элемента 4 и вращением приемной катушки 55, которая тянет основной кабель 6,
- натяжение, прикладываемое к проволочному элементу 4 с помощью электромагнитного тормоза 53А.
После этой ручной регулировки устройства 15 контроля и управления на машинном агрегате поведение проволочного элемента можно наблюдать на экране микрокомпьютера 20, т.е.:
- колебание проволочного элемента (Среднее - фиг.7, Максимальное - фиг. 5, Минимальное - фиг.6),
- положение проволочного элемента (Среднее за колебание, фиг.7).
Оператор может осуществлять регулировку для установления вышеупомянутых наладочных параметров и для установления наладочных параметров машинного агрегата в любое время.
Например, в случае, если используются хрупкие материалы (например, политетрафторэтилен PTFE), то окружающая температура или влажность окружающей среды непосредственно влияет на поведение проволочного элемента 4. На пути, по которому проходит проволочный элемент (направляющий ролик, направляющая и т. д. ), можно резко или постепенно создавать повышенную сложность его прохождения (прижатый направляющий ролик, изогнутая направляющая и т.д.), следовательно, увеличивая натяжение проволочного элемента 4 и нарушая позиционирование проволочного элемента 4 относительно ранее настроенного основного кабеля 6.
И другие параметры могут влиять на положение проволочного элемента 4, в частности в случае размерного дефекта (ширины или диаметра).
2/ Вариант использования в автоматическом режиме
Когда производится переключение с ручного режима в автоматический режим, то значения колебаний проволочного элемента 4 запоминаются после выборки, как среднее значение позиционирования проволочного элемента 4. Таким образом, эти значения используются как опорные значения для работы установки в автоматическом режиме.
Резидентная программа СППЗУ 80 обеспечивает для машинного агрегата, чтобы проволочный элемент 4 был "заблокирован" по положению и колебанию по отношению к основному кабелю 6А. Резидентная программа обеспечивает регулировку активных компонентов устройства 15 для компенсирования наблюдаемого смещения (положения проволочного элемента, колебания проволочного элемента) с помощью очередности команд, предварительно запрограммированных в СППЗУ 80.
При возникновении смещения положения проволочного элемента 4 по отношению к его исходному запомненному положению программа позволяет выполнить регулировку контролируемого вращения наматывающей головки 50, ускоряя или замедляя наматывающую головку 50, или выполнить регулировку контролируемого натяжения приемной катушки 55, усиливая или ослабляя тяговое натяжение на кабель 6В, или путем регулировки контролируемого механического натяжения, прикладываемого к проволочному элементу, которое также влияет на его положение.
Порядок очередности воздействия на активные компоненты может быть видоизменен оператором машинного агрегата в любое время для получения оптимального позиционирования проволочного элемента 4 по отношению к основному кабелю 6, и/или уменьшения, или увеличения колебания проволочного элемента 4.
Если наблюдаемые смещения слишком велики для самокоррекции, то резидентная программа СППЗУ 80 предназначена для остановки машинного агрегата.
Контролирование положения проволочного элемента 4 и его колебания в реальном времени связано с прослеживаемостью, которая позволяет оператору быть информированным о наблюдаемых смещениях, чтобы знать получающийся в результате уровень качества на данном производстве и знать технологический процесс изготовления, касающийся такого продукта, связывая его с временем изготовления, скоростями изготовления (вращение наматывающей головки, и т.д. ) и любыми задержками (остановками), которые могут произойти (например, замена проволочного элемента). Этот контроль проволочного элемента также позволяет знать смещение, которое может произойти вследствие воздействия внешних параметров на машинный агрегат (окружающая температура, влажность и т.д.). Для этого дополнительные датчики 82 передают в микропроцессор 75 данные измерений по температуре и влажности.



Изобретение относится к автоматизации процессов в кабельной промышленности. Технический результат - автоматизация универсального агрегата, характеризующегося несколькими типами операций и различными режимами намотки. Устройство контроля и управления с выборкой данных, поступающих в реальном времени, содержит оптический измерительный прибор, схему обработки данных с микропроцессором и средство внешнего управления. Микропроцессор принимает и осуществляет выборку данных, поступающих из оптического измерительного прибора, чтобы знать положение проволочного элемента и его механическое колебательное поведение в реальном времени до того, как он наматывается на основной кабель. Программирование осуществляется так, чтобы генерировать функцию самокоррекции возникающего отклонения в данных, касающихся положения и колебания проволочного элемента. Первый двигатель, второй двигатель и механическое средство натяжения регулируются так, чтобы переустанавливать оптимум работы машинного агрегата. 7 ил.
Устройство контроля и управления для машинного агрегата, предназначенного для выполнения операции намотки по меньшей мере одного проволочного элемента на основной кабель для получения обмотанного кабеля, причем машинный агрегат содержит наматывающую головку, которая направляет проволочный элемент, намотанный по меньшей мере на одну подающую катушку, первый двигатель для приведения во вращение наматывающей головки, второй двигатель для приведения во вращение приемной катушки, на которую наматывается обмотанный кабель, и средство для механического натяжения проволочного элемента при осуществлении процесса намотки, содержащее оптический измерительный прибор, включающий по меньшей мере один световой излучатель для проецирования светового пучка на проволочный элемент, и приемник для восприятия отраженного светового пучка с формированием сигнала измерения, схему обработки данных с микропроцессором, предназначенным для приема сигнала измерения и подачи сигналов управления и/или регулировки на первый и второй двигатели, и средство внешнего управления, содержащее, в частности, микрокомпьютер, для ввода параметров автоматической работы машинного агрегата в соответствии с заданной программой схемы обработки данных, причем схема обработки данных содержит запоминающее устройство, отличающееся тем, что микропроцессор схемы обработки данных предназначен для приема и выборки данных, поступающих из оптического измерительного прибора, для определения положения проволочного элемента и его поведения при механическом колебании в реальном времени до того, как проволочный элемент наматывается на основной кабель, запоминающее устройство программировано для хранения данных, касающихся значений максимальных, минимальных и средних колебаний проволочного элемента, выходы схемы обработки данных соединены с первым и вторым двигателями через вариаторы, с двигателем подающей катушки, с источником питания тормоза двигателя подающей катушки.
| СПОСОБ ОРГАНОСОХРАНЯЮЩЕГО ЛЕЧЕНИЯ УРОТЕЛИАЛЬНОГО РАКА ЛОХАНКИ ПОЧКИ | 2020 |
|
RU2739701C2 |
| Устройство для измерения времени распространения поперечных колебаний в канате подъемной установки | 1986 |
|
SU1440836A1 |
| US 3756004, 04.09.1973 | |||
| DE 3219677 А1, 24.11.1983. | |||

