Изобретение относится к разработке методики измерения расхода реки с использованием ультразвуковой волны и, в частности к разработке способа измерения горизонтальной средней скорости течения на множестве глубин с использованием ультразвукового луча для вычисления расхода большой реки или открытого русла промывной галереи.
При осуществлении обычного способа измерения скорости течения открытого русла использовали ультразвуковую волну для расчета расхода открытого русла следующим образом.
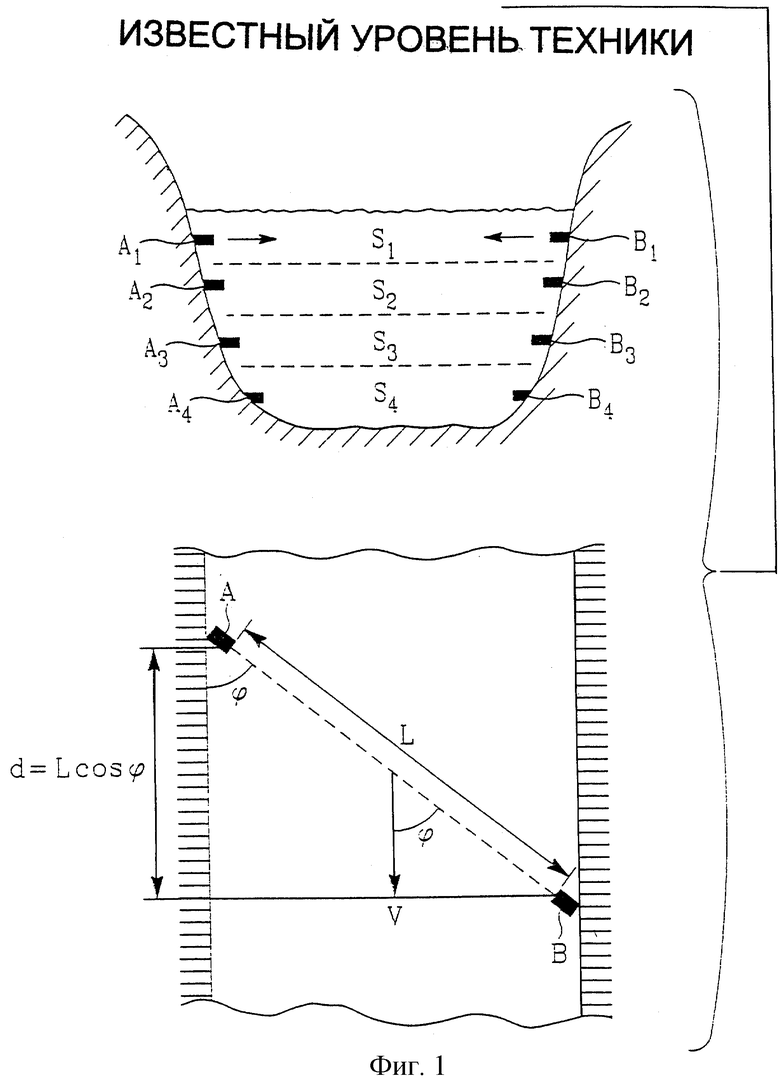
Как показано на фиг.1, множество парных ультразвуковых преобразователей A1 и B1, А2 и В2, А3 и В3, ... устанавливают на предварительно определенной глубине воды вдоль берега, по меньшей мере, на одной стороне открытого русла с образованием некоторого угла ϕ относительно направления скорости течения V. Времена ТАВ и ТВА распространения ультразвука, передаваемого от преобразователя Ai к Bi и от Bi к Ai, измеряют следующим образом:

где С - скорость распространения ультразвука (называемая ниже "скоростью звука") в воде, V - горизонтальная средняя скорость течения, а L - расстояние между преобразователями Ai и Bi.
Разность времен распространения Δt (=tВА-tАВ) вычисляют на основании выражений (а) и (b) следующим образом:
При этом скорость течения V имеет следующий вид:
Квадрат скорости звука, С2, имеет следующий вид:
Следовательно, если подставить вышеуказанное выражение в выражение (1), общее выражение для измерения скорости течения представляется в следующем виде:
Ультразвуковой способ измерения скорости течения, описанный выше, называют "Способом, предусматривающим определение разности времен распространения ультразвука", который воплощен в расходомере модели "ЮЭФ2100 СиОу" (UF2100 СО), изготавливаемом фирмой "Ю.Эс.Эй. Ультрафлюкс Ко." (U.S.A. Ultraflux Co.). В расходомере модели "ЮЭФ2100 СиОу" используется следующее выражение для измерения скорости расхода:
В результате, это равнозначно выражению (2).

Хорошо известный ультразвуковой расходомер применяют для измерения скорости течения с использованием способа, предусматривающего определение разности времен распространения ультразвука, не только в случае трубы, но и в случае открытого русла. Помимо способа, предусматривающего определение разности времен распространения, существуют способы, предусматривающие определение разности частот и фаз, для измерения расхода, но они основаны на времени распространения ультразвука. Способ расположения ультразвуковых преобразователей идентичен показанному на фиг.1.
И тогда, если река относительно широкая, известные методики измерения горизонтальной средней скорости создают некоторые проблемы, например - следующие.
Во-первых, если расход реки вычисляют согласно измерению горизонтальной средней скорости течения на множестве глубин, то выбирают открытую площадь или свободное поперечное сечение S под прямым углом к направлению течения воды. Поэтому расход Q вычисляют следующим образом:
Q-=Vs•S, (3)
где Vs - средняя скорость течения в свободном поперечном сечении, направленная под прямым углом к площади S свободного поперечного сечения. Таким образом, расход можно вычислить, измеряя среднюю скорость течения Vs в поперечных сечениях на множестве глубин воды.
Еще один способ предназначен для вычисления частичного расхода, получаемого путем умножения частичной площади Si на скорость течения Vi, и последующего суммирования всех частичных расходов. Это то же самое, что и способ вычисления расхода, используемый в расходомере модели "ЮЭФ2100 СиОу", следующим образом:
Какой бы способ ни использовался, имеются различные поперечные сечения на расстоянии d интервала, на которое распространяются ультразвуковые волны в различных формах, при этом поперечные сечения не равны друг другу, как показано на фиг.2. Иными словами, хотя ультразвуковые волны распространяются или передаются вдоль линии L под влиянием скорости течения, такие скорости течения в множестве точек на линии L отличаются в соответствии с профилями русла реки в любой соответствующей точке. Скорость течения, измеряемая с использованием ультразвуковой волны, является средней скоростью течения, но по средней скорости течения нельзя определить, как она связана с каким-либо поперечным сечением. Для этого нужно выбрать дополнительное поперечное сечение. Это может вызвать большую погрешность измерения расхода. Например, если ширина реки составляет 500 м, а угол ϕ составляет 45o, то расстояние d равно 500 м, но естественная река, имеющая одно и то же поперечное сечение на расстоянии d, почти не встречается. Если дополнительно выбирают свободное поперечное сечение, то погрешность измерения расхода не удается оценить с высокой достоверностью.
Во-вторых, обнаруживаются также скорости течения под косым углом и циркуляционные (вращательные) составляющие.
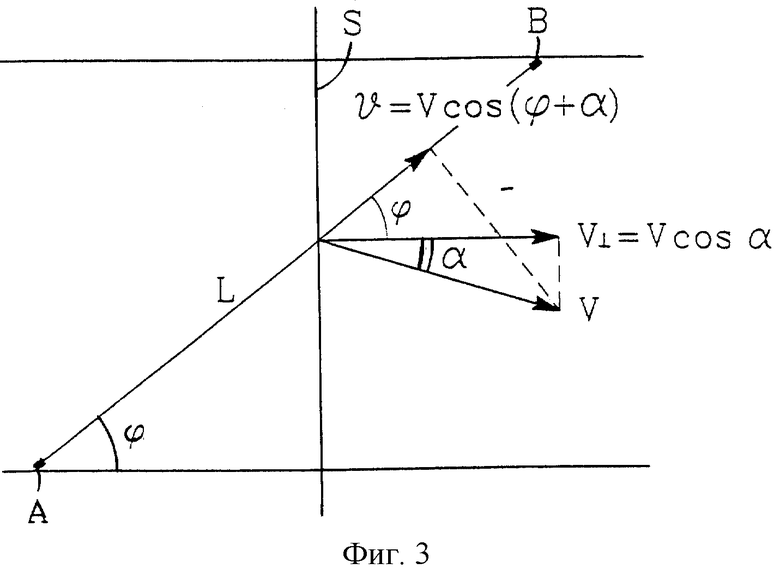
Как показано на фиг.3, подлежащая измерению скорость течения является скоростью течения V┴ перпендикулярной площади S поперечного сечения. Если направление скорости течения V соответствует направлению скорости течения V┴ и имеет угол ϕ относительно линии L, вдоль которой распространяется ультразвуковая волна, то результатом, вычисляемым с помощью выражения (2) для измерения скорости течения на основании разности времен распространения, является скорость течения V┴. Но если направление скорости течения имеет угол ϕ+α к линии L, это вызывает большую погрешность при вычислении скорости течения с помощью выражения (2). Исходя из фиг.3, выводят соответствующее выражение и измеряют скорость течения с использованием ультразвукового луча следующим образом:
Но когда угол α косого течения вычисляют с помощью выражения (2) при неопределенном условии, то результат представляют следующим образом:
Скорость течения для вычисления расхода должна иметь следующий вид:
Следовательно, V' рассматривают как V┴, и тогда погрешность δV измерения V┴ представляют следующим образом:
Если угол ϕ составляет 45o, то tаnϕ равен 1, a δV равна -tanα. Если угол α косого течения изменяется в диапазоне 1~10o, то погрешность δV измерения V┴ составляет до 1,745~ 17,63%. Как правило, угол α косого течения в реке составляет 2~3o. Даже если точно измерены время распространения ультразвука, линия L и расстояние d, то погрешность δV измерения скорости течения V┴ составляет 3,5~5,2%, что является проблемой при измерении скорости течения.
В-третьих, возникает проблема при использовании ультразвуковой волны. Ультразвуковой импульс сильно затухает из-за его распространенной гармонической составляющей. Это не только затрудняет обеспечение достаточной мощности на приеме, если линия L относительно длинная, но и может вызвать большую погрешность измерения времени распространения.
Как показано на фиг.4А, 4В и 4С, ультразвуковые импульсы двух типов изменяются во время передачи. Как правило, очень часто используют импульс воздействия (фиг. 4В). Ультразвуковой импульс поглощается или рассеивается, в значительной степени, соответственно изменению концентрации плавающих частиц или циркуляционной составляющей скорости течения. Это вызывает сильную пульсацию амплитуды принимаемого сигнала. Поэтому при фиксации момента времени приема ультразвукового импульса возникает погрешность измерения времени распространения ультразвука, соответствующая одному или двум периодам ультразвуковой частоты. Для уменьшения погрешности измерения времени распространения ультразвука нельзя дополнительно увеличивать частоту ультразвукового импульса в реке. Чем выше частота, тем больше затухание из-за поглощения. Кроме того, рассеивание становится больше из-за плавающих частиц. Таким образом, предпочтительно снижать частоту, но со снижением частоты уменьшается интенсивность ультразвукового импульса, вызывая явление кавитации. Это означает, что в реке нельзя передавать ультразвуковой импульс с интенсивностью, превышающей некоторую интенсивность. В результате, ширина реки, которую можно адаптировать к способу, предусматривающему определение разности времен распространения, весьма ограничена.
Из уровня техники известен способ измерения скорости для вычисления расхода с использованием ультразвукового луча, при котором ультразвуковой луч направляют перпендикулярно движению потока и измеряется отклонение луча от перпендикулярного движения потока и измеряют отклонение луча от перпендикулярного направления, зависящее от скорости потока (см. П.П. Кремлевский. Расходомеры и счетчики количества. Ленинград, "Машиностросние", 1989, Глава 22.10, с. 463-464, рис.273 б). Но в случае, если известное техническое решение используется при измерении расхода реки, имеющей значительную ширину, это может вызвать большую погрешность измерения. Поэтому способ измерения расхода с помощью ультразвуковой волны не используют на реке, за исключением искусственного открытого русла, имеющего малую ширину.
Следовательно, для решения этих проблем и исключения этих недостатков, задача изобретения состоит в том, чтобы разработать способ измерения горизонтальной средней скорости течения с помощью ультразвука для вычисления расхода реки, имеющей большую ширину.
Другая задача изобретения состоит в том, чтобы разработать способ коррекции и проверки устройства для измерения скорости течения, предназначенного для измерения горизонтальной средней скорости течения с помощью ультразвука.
Следовательно, изобретение относится к способу измерения расстояния ухода, на которое уходит ультразвуковой луч пропорционально скорости течения после распространения под прямым углом к направлению течения воды.
Как показано на фиг.5, ультразвуковой луч распространяется в жидкости от неплавающей точки О в направлении к неплавающей точке "а". Если жидкость стоячая (V= 0), ультразвуковой луч достигает точки "а". Но если жидкость движется, ультразвуковая волна достигает точки "b". Величину l сноса ультразвукового луча (расстояние l) между точками "а" и "b" представляют следующим образом:
где D - ширина реки, С - скорость распространения ультразвукового луча в жидкости, a t - время распространения передаваемого ультразвукового луча на ширину или расстояние D интервала.
Угол θ, который образуют линии "Оа" и "Оb", представляют следующим образом:

Если ультразвуковые излучающие и принимающие преобразователи перемещаются со скоростью, равной средней скорости течения, угол θ становится равным нулю и величина l сноса также становится равной нулю. Угол θ и величину l сноса называют "расстоянием ухода ультразвука" и "углом ухода ультразвука", как описано ниже. Исходя из выражений 5 и 6, скорость течения V представляют следующим образом:
V=C•tanθ (8)
Поэтому скорость течения V получают путем измерения угла Q или величины l (расстояния l) сноса ультразвука и скорости звука С.
Явление ухода ультразвукового луча является общеизвестным физическим явлением и его подробное описание опущено.
С другой стороны, если собираются вывести выражение для измерения скорости течения на основании разности времен распространения ультразвука, то скорость звука С могут ошибочно считать изменяющейся в соответствии со скоростью течения, потому что время распространения ультразвука представлено в виде L/(C+Vcosϕ). Скорость звука С изменяется только в зависимости от жидкости, а не от влияния скорости течения. Выражение для измерения разности времен распространения выводят, исходя из ухода (отклонения) ультразвукового луча. Иными словами, следует понимать, что угол θ ухода ультразвука представляет изменение направления распространения ультразвука. Направление распространения не подвержено влиянию скорости течения, но распространение происходит в соответствии с ней.
Если расстояние l или угол θ ухода, скорость звука С и время распространения t в выражениях (7) и (8) точно измерены, можно измерить скорость течения V. Это решает три проблемы известного уровня техники при измерении средней скорости течения для вычисления расхода реки, потому что ультразвуковой луч распространяется вдоль линии выбранного поперечного сечения течения реки. Это устраняет неясность, связанную с выбором поперечного сечения S. За счет использования непрерывных синусоидальных волн вместо ультразвукового импульса, также снимается проблема при усилении принимаемого сигнала даже в случае, если амплитуда принимаемого сигнала сильно пульсирует. Это решает проблемы, связанные с косым течением, потому что расстояние l или угол θ изменяется на основании составляющей под прямым углом к направлению распространения ультразвука даже несмотря на то, что угол α, который поперечное сечение S образует с направлением скорости косого течения, становится больше. Если скорость течения соответствует направлению распространения ультразвука, то и расстояние l, и угол θ становятся равными нулю.
Если направление скорости течения образует угол 90o±α с направлением распространения ультразвука, расстояние l представляют в следующем виде:

где V┴(= Vcosα) - составляющая скорости течения под прямым углом к направлению распространения ультразвука.
Следовательно, если направление распространения ультразвука почти соответствует поперечному сечению S, выбранному для измерения расхода, то для вычисления расхода используют скорость течения V┴. Однако измерение угла θ ухода и последующее получение V (=C-tanθ) с помощью выражения (8) не является предпочтительным, так как tanθ равен l/D. Например, желательно получать скорость течения с помощью выражения (7) без измерения расстояния l и вычисления значения tanθ. Здесь нужно отметить, что, в соответствии с изобретением, осуществляют точное измерение расстояния l ухода ультразвука.
Теперь изобретение будет подробно описано со ссылками на прилагаемые чертежи, где
фиг.1 изображает вид, иллюстрирующий принцип измерения расхода открытого русла в соответствии с известным уровнем техники,
фиг.2 изображает вид, иллюстрирующий изменение площади поперечного сечения открытого русла, например - реки,
фиг. 3 изображает вид, иллюстрирующий погрешность измерения скорости течения из-за косого течения,
фиг. 4А, 4В и 4С изображают виды, иллюстрирующие затухание ультразвукового импульса в жидкости,
фиг.5 изображает вид, иллюстрирующий уход при распространении ультразвукового луча из-за наличия скорости течения,
фиг. 6А и 6В изображают виды, иллюстрирующие способ измерения расстояния ухода ультразвука в соответствии с одним конкретным вариантом осуществления изобретения,
фиг.7 изображает график, иллюстрирующий кривые изменения сигналов, принимаемых в соответствии с изобретением,
фиг. 8 изображает вид, иллюстрирующий выбор интервала расстояния между двумя принимающими преобразователями в соответствии с изобретением,
фиг. 9А и 9В изображают виды, иллюстрирующие выбор интервала расстояния между двумя принимающими преобразователями в соответствии с изобретением,
фиг. 10 изображает график, иллюстрирующий способ измерения расстояния ухода ультразвукового луча в соответствии с другим конкретным вариантом осуществления изобретения,
фиг. 11 и 12 изображают виды, иллюстрирующие устройство, сконструированное в соответствии с конкретными вариантами осуществления изобретения, и
фиг. 13 изображает вид, иллюстрирующий способ коррекции и проверки погрешности измерения расстояния ухода ультразвука в соответствии с изобретением.
На фиг.6 показан способ измерения расстояния ухода ультразвука в соответствии с изобретением. Ультразвуковые излучающие преобразователи 31 и 32 выполнены в виде объединенной пары преобразователей, разнесенных на некоторый интервал L друг от друга. Ультразвуковой излучающий преобразователь 1 соединен с ультразвуковым генератором 2. Ультразвуковой излучающий преобразователь 1 распространяет непрерывные ультразвуковые лучи в воде вдоль свободного поперечного сечения S, выбранного для измерения расхода. Обращаясь к фиг. 6А, отмечаем, что если характеристики направленности ультразвуковых лучей из ультразвукового излучающего преобразователя 1 являются симметричными, то углы направленности достаточно малы, а центральная точка парных ультразвуковых принимающих преобразователей 31 и 32 (точка L/2) соответствует линии свободного поперечного сечения S, и когда скорость течения V равна нулю, парные ультразвуковые принимающие преобразователи 31 и 32 выдают сигналы выходных напряжений U31 и U32, равные друг другу; например, U31 равно U32. Эти выходные напряжения подают в дифференциальный усилитель 4 для усиления разности напряжений между ними. В этот момент дифференциальный усилитель 4 выдает напряжение сигнала ΔU, равное нулю; ΔU =К(U32-U31)=0, где К - коэффициент усиления.
Если скорость течения V не равна нулю, ультразвуковой луч уходит на расстояние l; l=(V/C)•D. Выходное напряжение U31 ультразвукового принимающего преобразователя 31 становится меньше, чем U32 ультразвукового принимающего преобразователя 32; ΔU =К(U32-U31)>0. В этот момент, поскольку парные ультразвуковые принимающие преобразователи 31 и 32 перемещаются в направлении под прямым углом к поперечному сечению S, например - в направлении X, ΔU уменьшается до нуля. Поскольку парные ультразвуковые принимающие преобразователи 31 и 32 непрерывно перемещаются, ΔU преобразуется в отрицательную величину; ΔU<0. Здесь нужно отметить, что когда величина ΔU становится равной нулю, она представляет измеряемый интервал l ухода ультразвука, как показано на фиг.6В.
На фиг. 7 показаны кривые изменения выходного значения ΔU дифференциального усилителя 4; ΔU =К(U32-U31). Когда коэффициент усиления дифференциального усилителя 4 становится больше, градиент кривой разности напряжений ΔU увеличивается. Следовательно, можно без затруднений точно зафиксировать момент времени, когда ΔU становится равной нулю. Например, выходной сигнал дифференциального усилителя подают на компаратор (не показан), а затем выходной сигнал компаратора приводит в действие моностабильный мультивибратор (не показан) для генерирования заданного импульсного сигнала. Заданный импульсный сигнал обеспечивает определение момента времени, когда парные ультразвуковые принимающие преобразователи 31 и 32 проходят через положение, в котором ΔU становится равной нулю.
Интервал L - расстояния между парными ультразвуковыми принимающими преобразователями 31 и 32 выбирают следующим образом.
На фиг.8 показано, что сначала получают угол β, образованный между точкой, в которой давление звука становится максимальным, Р/Рmах (=1/0) при использовании характеристик направленности ультразвукового излучающего преобразователя 1, и точкой, соответствующей давлению звука P1/Pmax/, в которой ультразвуковые принимающие преобразователи 31 и 32 осуществляют прием, а затем вычисляется интервал L расстояния с помощью следующего выражения:
Например, когда давление звука P1 выбирают имеющим значение 0,95Рmах в предположении, что угол β имеет значение 0,005o, L/D имеет значение 0,000166, равное 0 2•0,95•tan0,005o. Следовательно, когда каждое из значений ширины реки составляет 100 м, 500 м и 1000 м, значения интервала L расстояния соответственно составляют 0,166 м, 0,83 м или 1,66 м. Чтобы уменьшить интервал L расстояния между парными ультразвуковыми принимающими преобразователями 31 и 32, желательно, чтобы угол направленности ультразвукового луча, излучаемого из излучающего преобразователя 1, стал меньше. Легко обеспечить угол направленности 2o~3o. Кроме того, когда выбирают давление звука P1/Рmах, имеющим большую величину, угол направленности β и интервал L расстояния становятся меньше. Для этого нужно увеличить коэффициент усиления К дифференциального усилителя 4.
Минимальное и максимальное расстояния Хmin и Хmax перемещения парных ультразвуковых принимающих преобразователей 31 и 32 представляют следующим образом:

Поэтому ширину ΔХ между расстояниями перемещения
представляют следующим образом:
Здесь Vmax и Vmin - максимальная и минимальная скорости течения в реке, которые нужны для измерения средней скорости течения, Сmах и Cmin - максимальная и минимальная скорости распространения ультразвука в реке, D - ширина реки, а 1,2 - коэффициент для дополнительного перемещения парных ультразвуковых принимающих преобразователей 31 и 32 для точной фиксации момента времени, когда разность ΔU становится равной нулю, после чего Х становится равным 1.
Приводя пример вычисления ширины ΔХ, расстояния перемещения парных ультразвуковых принимающих преобразователей 31 и 32, отмечаем, что если Vmin составляет 0,5 м/с, Vmax составляет 3 м/с, Сmах составляет 1500 м/с в случае, когда температура воды в реке составляет около 26oС, и Сmin составляет 1423 м/с в случае, когда температура воды в реке составляет около 0oС, то вычисление ΔХ/D дает следующий результат:
Если каждое из значений ширины D реки составляет 100 м и 500 м, то ΔХ принимает значения 0,178 м и 0,89 м, соответственно.
Для пояснения преимуществ при измерении расстояния l ухода ультразвука в соответствии с изобретением, на фиг.9А и 9В проиллюстрирован другой способ измерения расстояния l.
Обращаясь к фиг.9А, отмечаем, что на интервале между расстояниями lmах и lmin расположено некоторое количество принимающих преобразователей в виде предварительно определенной мозаичной структуры, которые, в свою очередь, электрически соединены с одними концами некоторого количества дифференциальных усилителей. Эти дифференциальные усилители другими своими концами соединены с ультразвуковым принимающим преобразователем 31. Тогда, если максимальное давление звука ультразвукового луча приложено к принимающему преобразователю 31, разность выходных напряжений между ультразвуковыми принимающими преобразователями 31 и 31, максимизируется из-за наличия скорости течения. Если интервал между расстояниями 1max и 1min разделен на 100 частей, а разность напряжений между скоростями Vmax и Vmin измеряется таким устройством, как потенциометр, имеющий разрешение одна сотая, то нужен модуль, выполненный в виде 100 ультразвуковых принимающих преобразователей в форме мозаики. Если разность скоростей ΔV составляет 2,5 м/с, Vmax-Vmin=3-0,5= 2,5, то скорость течения измеряется при использовании разрешения 0,025 м/с (=2,5/100). В этом случае минимальная погрешность измерения скорости течения принимает следующее значение:
δVmin = (0,025×100)/0,5 = 5%
Погрешность измерения является относительно большой величиной.
Способ нужно осуществлять с применением мозаичного модуля, включающего в себя сотни принимающих преобразователей на интервале между расстояниями lmax и lmin, чтобы точно измерить интервал l расстояния. Таким образом, размер принимающего преобразователя 3i должен стать меньше. Принимаемое напряжение также можно сделать ниже уровня шума. Устройство для осуществления способа становится сложным.
Обращаясь к фиг.9В, отмечаем, что здесь проиллюстрирован другой способ измерения расстояния l. Способ предназначен для фиксации положения, в котором разность выходных напряжений ΔU между парными ультразвуковыми принимающими преобразователями 31 и 32 максимизируется при условии, что принимающий преобразователь 31 закреплен на заданном месте, а принимающий преобразователь 32 перемещается.
Отметим, что эти способы предназначены для измерения расстояния l путем фиксации положения, отмечаемого при максимальной разности напряжений ΔU между парными ультразвуковыми принимающими преобразователями.
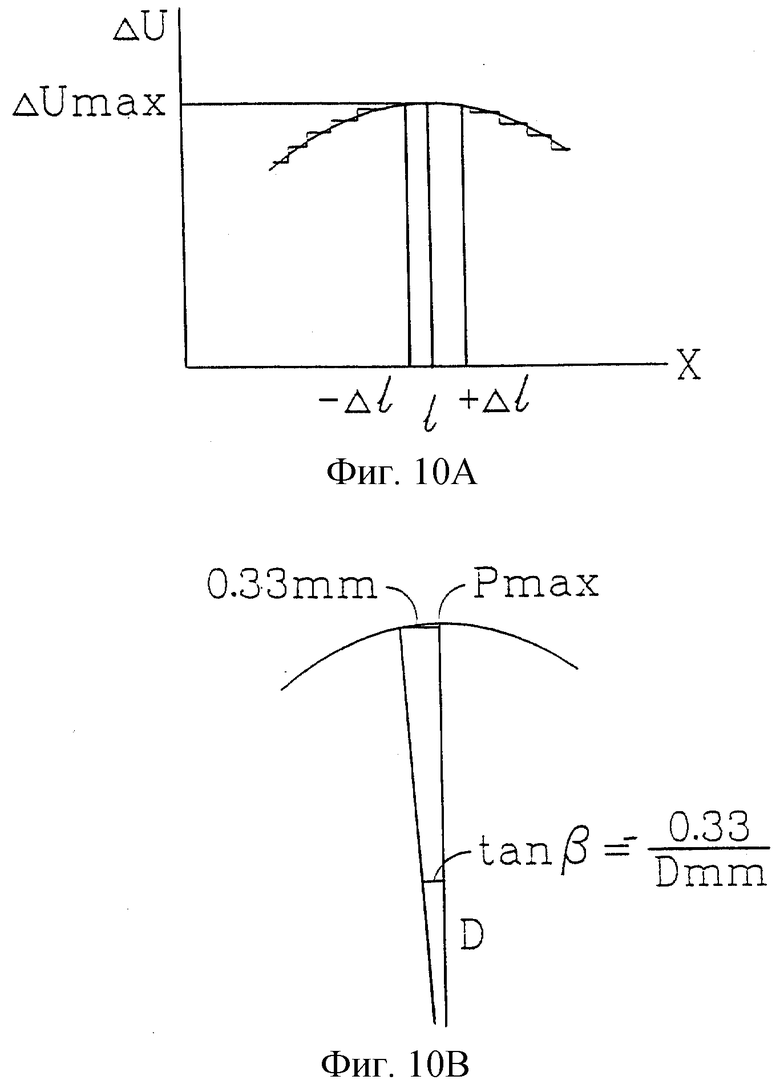
Обращаясь к фиг.10А, отмечаем, что ступенчатая кривая показывает напряжения выходного сигнала из множества ультразвуковых принимающих преобразователей в виде мозаичной структуры. Эта кривая может вызвать большую погрешность при фиксации момента времени, когда разность напряжений ΔU максимизируется, из-за неясности верхней точки кривой. Кривая изменения разности напряжений ΔU является той же самой для характеристики направленности излучающего преобразователя.
Если минимальная скорость течения составляет 0,5 м/с, ширина D реки составляет 100 м и скорость звука 331 м/с, то расстояние l составляет 33,3 мм. Если расстояние l должно измеряться в диапазоне погрешности 1%, расстояние ±Δ допустимой погрешности составляет 0,33 мм.
Обращаясь к фиг.10В, отмечаем, что точка (а), удаленная на расстояние Δ1 допустимой погрешности, составляющее 0,33 мм, от положения, в котором максимальное давление Рmах находится в точке максимума, исходя из характеристик направленности ультразвука, образует угол β относительно положения излучения ультразвука; например, β равен tan(0,33 мм/D). Если ширина D реки составляет 100 м, то угол β составляет 0,00019o. Поэтому даже если угол направленности ультразвукового излучающего преобразователя 1 зафиксирован как относительно больший острый угол величиной 2o~3o, невозможно зафиксировать положение, отображающее максимальное давление звука.
Только если принимающий преобразователь 32 (показанный на фиг.9В), принудительно перемещают с большой скоростью, коэффициент изменения кривой функции ΔU(t) разности напряжений значительно увеличивается, так что ее можно интегрировать. В этот момент максимальное значение давления звука Рmax можно как-то фиксировать, но устройство для перемещения принимающего преобразователя 32 может быть сложным.
Как описано выше, когда не интегрируют изменение разности напряжений, выдаваемое из принимающих преобразователей 31 и 32, и используют мозаичный тип принимающего преобразователя, то в случае, если коэффициент затухания пульсирует во время распространения ультразвукового луча, невозможно зафиксировать момент, когда давление звука максимизируется. В этом случае при измерении коэффициентов передачи по выходному напряжению принимающих преобразователей нужно фиксировать момент времени, когда измеряемый коэффициент передачи по напряжению максимизируется, но при фиксации момента, когда максимизируется коэффициент изменения, возникает большая ошибка, так как диапазон коэффициентов изменения выходных напряжений очень мал.
В отличие от этого, согласно изобретению, даже если интенсивность ультразвукового луча флуктуирует в положении приема, не возникают проблемы с фиксацией момента, когда разность напряжений ΔU становится равной нулю. Кроме того, скорость перемещения принимающих преобразователей 31 и 32 не связана с этим. Регулируя интервал L между принимающими преобразователями 31 и 32, можно гарантировать большую разность напряжений, прикладываемую к дифференциальным усилителям. Кроме того, устройство для фиксации момента, когда разность напряжений ΔU становится равной нулю, очень простое. Следовательно, с помощью изобретения можно точно измерять интервал l ухода ультразвука.
Чтобы измерить интервал l ухода ультразвука, а затем вычислить горизонтальную среднюю скорость течения V, нужно измерить ширину D реки и время t распространения ультразвука или скорость звука С в реке следующим образом:
Отметим, что способы измерения времени t распространения ультразвука и скорости звука С хорошо известны, а их подробное пояснение опущено, поскольку это не входит в техническую идею изобретения. Далее, для измерения времени t распространения ультразвука должен потребоваться сигнал, представляющий работу ультразвукового преобразователя 1 во время излучения ультразвука. Иными словами, с одного берега, где находится ультразвуковой излучающий преобразователь 1, нужно передавать сигнал излучения ультразвука на другой берег реки, где находится ультразвуковой принимающий преобразователь. В качестве средства передачи используется проводное или беспроводное устройство связи.
Кроме того, имеется хорошо известный способ измерения скорости звука С вместо времени t распространения ультразвука. Например, располагают два принимающих преобразователя в направлении распространения ультразвука так, что они отстоят на интервал d друг от друга. Далее, принимающие преобразователи принимают ультразвуковые лучи, излучаемые поочередно излучающим преобразователем, измеряют время t распространения ультразвука и вычисляют скорость звука С; С равна d/t. Скорость звука С равна единице на интервале d. И тогда измеряемая скорость звука является скоростью звука СD на интервале D. При условии, что С не равна СD, погрешность измерения СD равна δC[= (C-CD)/CD].
При том же условии, скорость звука С изменяется в соответствии с температурой воды.
C ≅ 1557 - 0,0244(74 - T2) ≅ 1557 - [1 - 1,57•10-5(74 - T2)],
где Т - средняя температура воды на интервале, отведенном для распространения ультразвукового луча. Поэтому погрешность измерения скорости СD имеет следующий вид:
Например, если средняя температура ТD на интервале D составляет 24oС, а температура воды ТD на интервале d у берега реки составляет 25oС, погрешность измерения δC составляет 0,0162%. Разность температур ΔТ между средней температурой ТD на ширине D реки и температурой Тd у берега реки претерпевает сезонные изменения, но не превышает 2oС.
Если горизонтальную среднюю скорость измеряют на множестве глубин воды, чтобы измерить расход, это должно сопровождаться измерением глубины воды. Методика измерения глубины воды путем использования ультразвукового луча хорошо известна. При условии возможности измерения глубины воды, можно точно измерить скорость звука С. Но эта измеренная скорость звука представляет скорость звука Сh на множестве глубин воды, не соответствующую скорости звука CDi на множестве горизонтальных интервалов. Если глубина воды относительно больше летом, горизонтальная средняя скорость звука СD на поверхности воды несколько больше, чем единичная Сh под водой. В отличие от этого, горизонтальная средняя скорость СD распространения ультразвука несколько меньше, чем единичная Сh под водой. Здесь нужно отметить, что погрешность измерения скорости течения на поверхности воды становится положительной, а погрешность измерения скорости течения под водой становится отрицательной. Поэтому погрешность, негативно влияющая на результат вычислений расхода, уменьшается.
Устройство для осуществления способа измерения интервала l ухода ультразвука и вычисления горизонтальной средней скорости течения является следующим.
Обращаясь к фиг.11, отмечаем, что здесь изображено устройство для измерения интервала ухода ультразвука, предназначенное для измерения средней горизонтальной скорости течения. Дифференциальный усилитель 4 принимает сигналы выходного напряжения от парных принимающих преобразователей (31)i и (32)i. Компаратор 5 генерирует импульсный сигнал для приведения в действие моностабильного мультивибратора или одновибратора 6, когда выходное напряжение дифференциального усилителя 4 становится равным нулю, причем парные принимающие преобразователи (31)i и (32)i, установлены на рейке 14, будучи разнесенными на интервал L друг от друга. Рейка 14 выполнена с возможностью принудительного перемещения влево и вправо в соответствии с направлением вращения шестерни 12. Вал 13 шестерни 12 сочленен с возможностью вращения с коробкой передач 9 для уменьшения числа оборотов электродвигателя. Электродвигатель 10, в свою очередь, соединен со счетчиком 11 для определения числа оборотов электродвигателя и первым таймером 16 и первым выключателем питания 17 для управления операциями включения-отключения электродвигателя. Мультиплексор 7 принимает импульсный сигнал из компаратора 6 и сигнал подсчета из счетчика 11 для генерирования сигнала данных, соответствующего расстоянию l перемещения рейки 14. Первый блок 8 арифметико-логической обработки запоминает горизонтальное расстояние Di(=const), предварительно введенное в запоминающее устройство, и принимает сигнал данных из мультиплексора 7 и сигнал данных скорости звука С из хорошо известного устройства, измеряющего скорость звука (не показано), для вычисления скорости течения V; V равна l•C/D. Второй блок 15 арифметико-логической обработки принимает сигнал данных из первого блока 8 арифметико-логической обработки для вычисления расхода реки. Корпус включает в себя шестерню и рейку, установленные в нем. Шестерня и рейка выполнены из такого материала, как полиуретан, чтобы они могли работать без использования смазочных веществ.
Обращаясь к фиг.12А и 12В, отмечаем, что ультразвуковые излучающие преобразователи li электрически соединены с генератором 2i для генерирования сигналов колебаний ультразвуковой синусоидальной волны, при этом ультразвуковые излучающие преобразователи li подвергаются колебаниям на ультразвуковых частотах, отличных друг от друга, для одновременного генерирования ультразвуковых лучей; например, f1 ≠ f2 ≠... ≠ fn. Генератор 2i, в свою очередь, соединен со вторым таймером 18 и вторым выключателем питания 19 для управления операцией включения-отключения генератора. Иными словами, второй таймер 18 подает сигнал на второй выключатель питания 19 один раз в течение заданного времени измерения расхода, например - одного часа. Первый таймер 16, установленный на принимающей стороне, синхронизирован со вторым таймером 18 на передающей стороне.
С другой стороны, как показано на фиг.11, устройство, включающее в себя шестерню 12 и рейку 14 для перемещения парных принимающих преобразователей (31)i и (32)i, расположено так, что они разнесены на половину расстояния L в направлении скорости течения от поперечного сечения S, выбранного для измерения расхода. В состоянии, когда скорость течения не измеряют, центральная точка L/2 между парными принимающими преобразователями (31)i и (32)i соответствует поперечному сечению S, выбранному для измерения расхода.
Устройство для измерения скорости течения работает следующим образом.
При измерении расхода, первый и второй таймеры 16 и 18 приводятся в действие для включения выключателей питания 17 и 19. В этот момент выключатели питания 17 и 19 приводят в действие излучающие преобразователи li для излучения ультразвукового луча непрерывных синусоидальных волн к парным принимающим преобразователям (31)i и (32)i. Вследствие этого, парные принимающие преобразователи (31)i и (32)i принимают излучаемый непрерывный ультразвуковой луч. В то же время, приводится в действие электродвигатель 10 для вращения шестерен 12, а также для перемещения реек 14 в направлении скорости течения. Одновременно, парные принимающие преобразователи (31)i и (32)i, прикрепленные к рейкам 14, перемещаются в том же направлении, что и рейка 14. Во время их перемещения, выходные напряжения парных принимающих преобразователей (31)i и (32)i становятся равными друг другу. Когда выходное напряжение ΔU становится равным нулю, моностабильный мультивибратор 6 генерирует импульс сигнала для подачи на мультиплексор 7. С другой стороны, когда электродвигатель 10 вращается, счетчик 11 подсчитывает число оборотов электродвигателя 10 для генерирования импульса сигнала, соответствующего расстоянию перемещения рейки 14. Когда мультиплексор 7 принимает импульс сигнала из моностабильного мультивибратора 6, он подает импульс сигнала на первый блок 8 арифметико-логической обработки, при этом импульс сигнала соответствует расстоянию l интервала ухода в соответствии с предлагаемым способом измерения расстояния ухода.
Первый блок 8 арифметико-логической обработки запоминает горизонтальное расстояние Di на множестве глубин воды, установленных заранее, и принимает сигналы данных глубин воды и скорости звука С из устройства для измерения скорости звука (не показано). Первый блок 8 арифметико-логической обработки вычисляет горизонтальную среднюю скорость течения Vi для выдачи вычисленного результата на второй блок 15 арифметико-логической обработки; Vi равна (li•C)/Di. После завершения измерения интервала li ухода ультразвука на множестве глубин воды, электродвигатель 10 останавливается, а затем вращается в обратном направлении для возврата парных принимающих преобразователей (31)i и (32)i в исходное положение, причем управляющая часть электродвигателя 10 не показана на фиг.11, а ее пояснение опущено, так как она хорошо известна в данной области техники.
Распределение скоростей течения в реке рассматривается в предположении, что наименьшая скорость получается под водой, а наибольшая скорость - на поверхности воды. Таким образом, расстояние l интервала равно lmin на самой нижней (наибольшей) глубине под водой, так что сигнал, представляющий момент времени, когда разность напряжений ΔU становится равной нулю, генерируется в самый ранний момент. Поскольку расстояние l интервала постепенно увеличивается по мере уменьшения глубины воды, положение, в котором напряжения выходного сигнала парных принимающих преобразователей (31)i и (32)i, расположенных ближе всего к поверхности воды, равны друг другу, соответствует максимальному расстоянию lmах интервала ухода, так что сигнал, представляющий момент времени, когда разность напряжений ΔU становится равной нулю, генерируется в самый последний момент.
Время измерения расхода зависит от скорости перемещения рейки 14. Нет сомнения в том, что устройство может точно измерять расстояние l интервала ухода. Иными словами, скорость вращения электродвигателя 10, коэффициент изменения передаточного отношения коробки передач 9, расстояние перемещения рейки 14 за один оборот шестерни 12, число оборотов электродвигателя 10, разрешение при измерении разности напряжений и т.д., выбирают надлежащим образом для регулирования допустимой погрешности измерения расстояния l интервала ухода.
Согласно изобретению, способ измерения расстояния интервала ухода ультразвука и последующего измерения горизонтальной средней скорости течения, легко осуществим, и можно точно измерить расход реки, в отличие от известных технических решений.
Кроме того, очень важно корректировать и проверять устройство для измерения расстояния интервала ухода ультразвукового луча и последующего измерения горизонтальной средней скорости течения. Способ коррекции и проверки такого устройства проиллюстрирован на фиг.13.
Резервуар 21 для воды включает в себя излучающий преобразователь 1 и парные принимающие преобразователи 31 и 32, соответственно, установленные с возможностью перемещения на микрометрических винтовых стержнях 22, причем микрометрические винтовые стержни 22 установлены в обеих торцевых частях резервуара 21 для воды. Когда парные принимающие преобразователи 31 и 32 перемещаются влево и вправо, измеряется положение перемещения, в котором моностабильный мультивибратор 6 генерирует импульс сигнала. Если характеристика направленности ультразвука излучающего преобразователя 1 симметрична, то линия, образованная под прямым углом относительно расстояния D интервала между парными принимающими преобразователями 31 и 32 и проходящая от излучающего преобразователя 1, пересекает половинную точку 1/2 расстояния D интервала. Если характеристика направленности ультразвука излучающего преобразователя 1 не симметрична, то эта линия пересекает другую точку между парными принимающими преобразователями 31 и 32, при этом точка пересечения является точкой пересечения свободного поперечного сечения S, выбранного для измерения расхода.
Далее, излучающий преобразователь 1 перемещается на расстояние Δl допустимой погрешности интервала l ухода ультразвукового луча с помощью микрометра 23 (например, на 0,25 мм). Когда парные принимающие преобразователи 31 и 32 перемещаются, они проходят через точку, соответствующую расстоянию Δl допустимой погрешности. В этот момент определяют, генерирует ли моностабильный мультивибратор 6 импульс сигнала в момент прохождения на расстояние Δl допустимой погрешности. Если моностабильный мультивибратор 6 не генерирует импульс сигнала, это случается потому, что коэффициент усиления К дифференциального усилителя 4 относительно мал или угол направленности ультразвука излучающего преобразователя 1 относительно велик. Таким образом, когда коэффициент усиления К дифференциального усилителя 4 подлежит увеличению в случае, если моностабильный мультивибратор 6 не генерирует импульс сигнала, расстояние D интервала между парными принимающими преобразователи 31 и 32 регулируют, чтобы заставить моностабильный мультивибратор 6 генерировать импульс сигнала в момент прохождения на расстояние Δl допустимой погрешности. Затем излучающий преобразователь 1 перемещают на некоторые интервалы, разделив расстояние интервала между минимальным и максимальным расстояниями lmin и lmах на несколько интервалов. Одновременно перемещают парные принимающие преобразователи 31 и 32. Во время их работы определяют соответствует ли положение в момент, когда моностабильный мультивибратор 6 генерирует импульс сигнала, положению перемещения излучающего преобразователя 1. А затем проверяют допустимую погрешность расстояния l интервала ухода. Резервуар 21 для воды является достаточно приемлемым, если его длина составляет 5 м.
Следовательно, данное изобретение обладает большим преимуществом, заключающимся в том, что легко проверять и корректировать расстояние l интервала ухода ультразвука. Иными словами, расстояние l интервала ухода ультразвука равно расстоянию, на которое перемещается излучающий преобразователь 1 при скорости течения V за время t распространения ультразвукового луча в реке, имеющей ширину D; t равно D/C. Для этого после перемещения излучающего преобразователя 1 на расстояние l интервала в резервуаре для воды можно провести проверку с целью коррекции допустимой погрешности расстояния l интервала ухода во время перемещения парных принимающих преобразователей 31 и 32.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВОЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2193208C2 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ВОДЫ В ОТКРЫТОМ РУСЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2139502C1 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 1999 |
|
RU2186399C2 |
| УЛЬТРАЗВУКОВОЕ МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ РАСХОДА | 1997 |
|
RU2138782C1 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА (ВАРИАНТЫ) | 2000 |
|
RU2189602C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ВОДЫ ИЛИ ЖИДКОСТИ (ВАРИАНТЫ) И БАРБОТАЖНЫЙ УРОВНЕМЕР | 1996 |
|
RU2124702C1 |
| Ультразвуковой способ измерения скорости течения и расхода воды в открытых водоемах | 2016 |
|
RU2664456C2 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ИЗМЕРЕНИЯ РАСХОДА ГАЗА | 2010 |
|
RU2453815C2 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ИЗМЕРЕНИЯ РАСХОДА ГАЗА | 2008 |
|
RU2396518C2 |
| УЛЬТРАЗВУКОВОЙ РАСХОДОМЕР С МЕТАЛЛИЧЕСКИМ ДАТЧИКОМ | 2016 |
|
RU2649421C1 |










Изобретение предназначено для измерения горизонтальной средней скорости течения на множестве глубин воды с использованием ультразвукового луча для вычисления расхода реки, имеющей большую ширину. Излучают ультразвуковые лучи вдоль свободного поперечного сечения, выбранного для измерения расхода, с одного берега реки и измеряют расстояние перемещения парных ультразвуковых принимающих преобразователей, разнесенных на некоторое расстояние друг от друга, до тех пор, пока выходные напряжения парных ультразвуковых принимающих преобразователей не станут равными друг другу. Измеряют горизонтальную среднюю скорость течения, при этом парные ультразвуковые принимающие преобразователи электрически соединены с дифференциальными усилителями, чтобы измерять положение в момент, когда разность их выходных напряжений становится равной нулю. Обеспечивается возможность использования ультразвукового способа для вычисления расхода реки, имеющей большую ширину. При этом обеспечивается проверка и коррекция измеренной величины. 3 з.п. ф-лы, 13 ил.

где t - время распространения ультразвука на расстояние D;
с - скорость звука в жидкости в момент измерения скорости течения;
D - расстояние между излучающим преобразователем и центральной точкой, находящейся на середине линии между парой принимающих преобразователей, пересекающей поперечное сечение S,
отличающийся тем, что перемещают парные принимающие ультразвуковые преобразователи в направлении скорости течения, ориентируясь на центральную точку, фиксируют точку, в которой выходные напряжения парных принимающих ультразвуковых преобразователей равны и измеряют величину l сноса ультразвукового луча между зафиксированной точкой и центральной точкой, при этом для измерения расхода в сечении реки на множестве глубин устанавливают ряд ультразвуковых излучающих преобразователей на одном берегу реки для излучения в направлении к другому берегу и несколько пар ультразвуковых принимающих преобразователей на другом берегу реки.
где Рmах - максимальное звуковое давление;
Р1 - заданное звуковое давление для приема принимающими преобразователями;
β - угол между линиями, соединяющими центральную точку характеристики направленности с координатами, определяющими Р1 и Pmax.
| Кремлевский П.П | |||
| Расходомеры и счетчики количества | |||
| -Л.: Машиностроение, 1989, с | |||
| Приспособление для автоматического перевода стрелок машинистом | 1922 |
|
SU463A1 |
| Способ измерения расхода воды в реке | 1987 |
|
SU1506278A1 |
| Ультразвуковой расходомер | 1984 |
|
SU1326891A1 |
| US 5228347, 20.07.1993. | |||

