Изобретение относится к грузоподъемным средствам и может быть использовано в угольной и других отраслях народного хозяйства для подъема и горизонтального перемещения груза.
За аналог в обоих вариантах принято устройство для перемещения груза, содержащее корпус, в котором установлены неподвижная и подвижная обоймы грузового полиспаста и гидропривод в виде силовых гидроцилиндров, смонтированных снаружи корпуса между осями обойм полиспаста, при этом корпус выполнен из отдельных корытообразных частей, между которыми образованы пазы для перемещения ползунов, закрепленных на концах оси подвижной обоймы грузового полиспаста, причем зазор между внутренней поверхностью корпуса и блоками меньше диаметра грузового каната (1).
Недостатком данного устройства является необходимость применения дополнительных средств для устранения провисания каната между блоками обойм при возвращении его в исходное положение.
Кроме того, устройством невозможно поднимать тяжеловесные грузы, поскольку в противном случае должен быть применен канат больших диаметров, а это влечет за собой увеличение массы устройства, что крайне неудобно при работе с ним в стесненных условиях горных выработок.
Причем такое устройство с открытым корпусом затруднительно применять в горных выработках с сырой средой и угольной пылью.
Перечисленные недостатки снижают эффективность эксплуатации устройства, особенно при применении его в шахтных условиях.
Наиболее близким по совокупности существенных признаков по обоим вариантам является устройство для перемещения груза, содержащее корпус, в котором установлены гидропривод подвижной обоймы, выполненный в виде домкрата, неподвижная обойма грузового полиспаста, канат которого размещен с зазором между внутренней поверхностью корпуса и блоками обойм, и телескопические подвижные и неподвижные трубы для каната, размещенные между подвижной и неподвижной обоймами и из которых одни огибают блоки подвижной обоймы, при этом в каждой из труб выполнен вырез по длине контактирования каната с блоком, и их диаметр не превышает трех диаметров каната. Причем корпус своими торцевыми частями закреплен на опорах (2).
Недостатком известного устройства является то, что им невозможно поднимать тяжеловесные грузы, поскольку тяговое усилие развивает только одна (сбегающая) ветвь каната полиспаста вследствие применения несимметричной схемы его запасовки. Чтобы повысить тяговое усилие, необходимо использовать канат большего диаметра, а это повлечет за собой соответственно увеличение габаритов устройства, которое не обеспечит удобств в эксплуатации, особенно в стесненных условиях горных выработок.
Причем во время работы устройства по подъему груза оно должно быть закреплено как минимум в двух точках опоры, в противном случае (при закреплении его в одной точке) образуется плечо, которое приводит к неравномерному распределению тягового усилия на сбегающую ветвь каната и, как следствие, к угловому смещению, а это снижает его работоспособность. Кроме того, требуются дополнительные трудозатраты по переносу устройства на новое место в заданной зоне его действия с применением ручного труда, что ухудшает условия его эксплуатации.
Причем данное устройство, выполняя операции по вертикальному перемещению груза, практически не может выполнять операции по его перемещению в горизонтальном направлении без применения дополнительных средств и ручных работ, что сужает зону обслуживания им.
Вследствие указанных недостатков известного устройства снижается эффективность его использования, особенно при перемещении груза по горизонтали.
В основу изобретения поставлена задача повысить эффективность работы устройства для подъема и горизонтального перемещения груза за счет улучшения эксплуатационных характеристик, обусловленного увеличением тягового усилия каната грузового полиспаста, за счет этого увеличить грузоподъемность устройства, а также расширить зону обслуживания им за счет обеспечения возможности перевода устройства из режима работы по подъему (или опусканию) груза в режим работы по перемещению его по горизонтали и наоборот.
Для достижения поставленной задачи по первому варианту в устройстве для перемещения груза, содержащем корпус, в котором установлены привод в виде гидродомкрата и подвижная обойма грузового полиспаста, закрепленная на штоке гидродомкрата, и канат грузового полиспаста, охватывающий блоки подвижной обоймы с возможностью размещения его ветвей вдоль продольной оси устройства в телескопически связанных подвижных и неподвижных трубах, расположенных параллельно друг другу, причем подвижные трубы огибают блоки подвижной обоймы посредством соответствующего выреза, выполненного по длине контактирования каната с упомянутыми блоками, а корпус своей одной торцевой частью со стороны расположения подвижной обоймы соединен с опорой, согласно изобретению канат грузового полиспаста выполнен замкнутым таким образом, что одни из его ветвей, размещенные в одних из телескопически связанных подвижных и неподвижных трубах и выполняющие функцию тяговых, выведены из соответствующих неподвижных труб наружу, а также из другой торцевой части корпуса с возможностью закрепления их концов на блоке, имеющем захват для груза, при этом канат своей средней частью жестко закреплен с помощью сегмента на торце цилиндра гидродомкрата с возможностью образования других ветвей полиспаста, расположенных в других упомянутых трубах и параллельно тяговым ветвям, причем последние размещены в соответствующих подвижных и неподвижных трубах, которые расположены диаметрально противоположно относительно цилиндра гидродомкрата и с противоположных сторон от его соответствующей оси, а первая из упомянутых торцевых частей соединена с опорой с возможностью поворота устройства относительно опоры посредством промежуточного элемента, например отрезка цепи.
Для достижения поставленной задачи по второму варианту в устройстве для перемещения груза, содержащем корпус, в котором установлены привод в виде гидродомкрата и подвижная обойма грузового полиспаста, закрепленная на штоке гидродомкрата, и канат грузового полиспаста, охватывающий блоки подвижной обоймы с возможностью размещения его ветвей вдоль продольной оси устройства в телескопически связанных подвижных и неподвижных трубах, расположенных параллельно друг другу, причем подвижные трубы огибают блоки подвижной обоймы посредством соответствующего выреза, выполненного по длине контактирования каната с упомянутыми блоками, а корпус своей одной торцевой частью со стороны расположения подвижной обоймы соединен с опорой, согласно изобретению канат грузового полиспаста выполнен замкнутым таким образом, что одни из его ветвей, размещенные в одних из телескопически связанных подвижных и неподвижных трубах и выполняющие функцию тяговых, выведены из соответствующих неподвижных труб наружу, а также из другой торцевой части корпуса с возможностью закрепления их концов на блоке, имеющем захват для груза, при этом канат своей средней частью жестко закреплен с помощью сегмента на торце цилиндра гидродомкрата с возможностью образования других ветвей полиспаста, расположенных в других упомянутых трубах и параллельно тяговым ветвям, причем последние размещены в соответствующих подвижных и неподвижных трубах, которые расположены диаметрально противоположно относительно цилиндра гидродомкрата и с противоположных сторон от его соответствующей оси, причем в качестве опоры используют цепь, закрепленную между двумя упорами и расположенную вдоль корпуса по одну из его сторон, а первая из упомянутых торцевых частей соединена с упомянутой цепью посредством фиксатора, имеющего корпус, шарнирно соединенный с указанной частью корпуса устройства, и клин, вставленный в одно из звеньев этой цепи, причем длина цепи соответствует протяженности зоны действия устройства.
При этом устройство снабжено дополнительным фиксатором, взаимодействующим с подвижной обоймой посредством тяги, проходящей через сквозное отверстие в корпусе устройства.
В сравнении с известным уровнем техники указанная выше совокупность существенных признаков заявляемого изобретения позволяет создать эффективное в работе устройство, надежно работающее по перемещению груза в вертикальном и горизонтальном направлениях за счет изменения схемы запасовки каната грузового полиспаста по сравнению с прототипом (2) и, как следствие, может быть использовано для перемещения тяжеловесных грузов при одновременной мобильности движения в зоне его действия и снижении трудозатрат.
Причинно-следственная связь между совокупностью существенных признаков заявляемого изобретения в двух вариантах, указанных выше, и достигаемым техническим результатом следующая.
Одним из существенных признаков заявляемого устройства по первому варианту является то, что канат грузового полиспаста выполнен замкнутым и запасован симметрично относительно продольной оси устройства. Причем симметричная схема запасовки каната выполнена так, что одни из его ветвей, размещенные в одних из телескопически связанных подвижных и неподвижных трубах и выполняющие функцию тяговых, выведены из соответствующих неподвижных труб наружу, а также из другой торцевой части корпуса со стороны, противоположной стороне расположения подвижной обоймы, с возможностью закрепления их концов на блоке, имеющем захват для груза, при этом канат своей средней частью жестко закреплен с помощью сегмента на торце цилиндра гидродомкрата с возможностью образования других ветвей полиспаста.
Принятая схема запасовки каната позволяет, без увеличения диаметра каната, повысить вдвое его тяговое усилие по сравнению с прототипом (2) и за счет этого увеличить грузоподъемность устройства.
Другим существенным признаком заявляемого устройства является то, что другие ветви полиспаста расположены в других из телескопически связанных подвижных и неподвижных труб и параллельно тяговым ветвям, причем последние размещены в соответствующих телескопически связанных подвижных и неподвижных трубах, которые расположены диаметрально противоположно относительно цилиндра гидродомкрата и с противоположных сторон от его соответствующей оси. Благодаря этому конструкция устройства, без увеличения его габаритов, выполнена более компактной и удобной в эксплуатации.
Кроме того, одна из торцевых частей корпуса со стороны расположения подвижной обоймы соединена с опорой с возможностью поворота устройства относительно этой опоры посредством промежуточного элемента, например отрезка цепи. Такая взаимосвязь корпуса устройства с опорой позволяет осуществить повороты устройства из горизонтальной плоскости в вертикальную плоскость и наоборот без применения дополнительных средств, что расширяет зону обслуживания этим устройством.
Второй вариант заявляемого устройства отличается от первого тем, что за счет использования в качестве опоры цепи, закрепленной между двумя упорами и расположенной вдоль корпуса по одну из его сторон, и соединения одной из торцевых частей корпуса со стороны подвижной обоймы с упомянутой цепью посредством фиксатора, имеющего корпус, шарнирно соединенный с указанной частью корпуса устройства, и клин, вставленный в одно из звеньев цепи, обеспечивается поворот устройства в горизонтальной и вертикальной плоскостях, то есть, как и в первом варианте, достигается изменение режима работы устройства с одновременным расширением зоны обслуживания им.
Из изложенного следует, что второй вариант позволяет полностью осуществить процесс перемещения груза как по вертикали, так и по горизонтали, и соответственно достигнуть поставленной задачи - повысить эффективность устройства в процессе его эксплуатации, особенно в стесненных условиях шахтных выработок.
Кроме того, положительный эффект при реализации заявляемого устройства по второму варианту достигается также и за счет того, что оно снабжено дополнительным фиксатором, взаимодействующим с подвижной обоймой посредством тяги, проходящей через сквозное отверстие в корпусе устройства. Это обеспечивает возможность передвижения устройства на новое место в зоне его действия без применения дополнительных трудозатрат, выполнив при этом только одну операцию - рассоединив или соединив фиксатор со звеном цепи, который во время работы устройства отсоединен от цепи.
Таким образом, оба варианта заявляемого устройства, благодаря предлагаемой компоновке его элементов, позволяют повысить тяговое усилие каната в два раза по сравнению с прототипом (2), что, в свою очередь, улучшает эксплуатационные характеристики устройства, а также дает возможность расширить зону обслуживания им.
Преимуществом первого варианта по сравнению со вторым является конструктивная простота соединения торцевой части корпуса с опорой, поскольку эта связь выполнена только через один промежуточный элемент, например отрезок цепи, что повышает эксплуатационную надежность устройства.
При втором варианте заявляемого устройства взаимосвязь корпуса устройства с опорой (цепью) выполнена посредством фиксатора клинового типа, что позволяет надежно закрепить устройство на этой опоре, исключая возможность поворота его относительно опоры во время перемещения груза.
Кроме того, снабжение устройства дополнительным фиксатором обеспечивает возможность передвижения его вдоль цепи, при сокращении штока гидродомкрата, и позволяет снизить трудозатраты на выполнение такой операции.
В настоящей заявке на выдачу патента соблюдено требование единства изобретения, поскольку оба варианта предназначены для перемещения груза по вертикали и горизонтали, решают одну и ту же задачу - улучшение эксплуатационных характеристик за счет повышения тягового усилия каната и расширения зоны обслуживания при достижении одного и того же технического результата - увеличение грузоподъемности устройства.
Таким образом, существенные признаки каждого из заявляемых устройств находятся в причинно-следственной связи с достигаемым техническим результатом и из анализа уровня техники в данной области не очевидны явным образом для специалиста. Следовательно, каждое из заявляемых изобретений соответствует условию патентоспособности "изобретательский уровень".
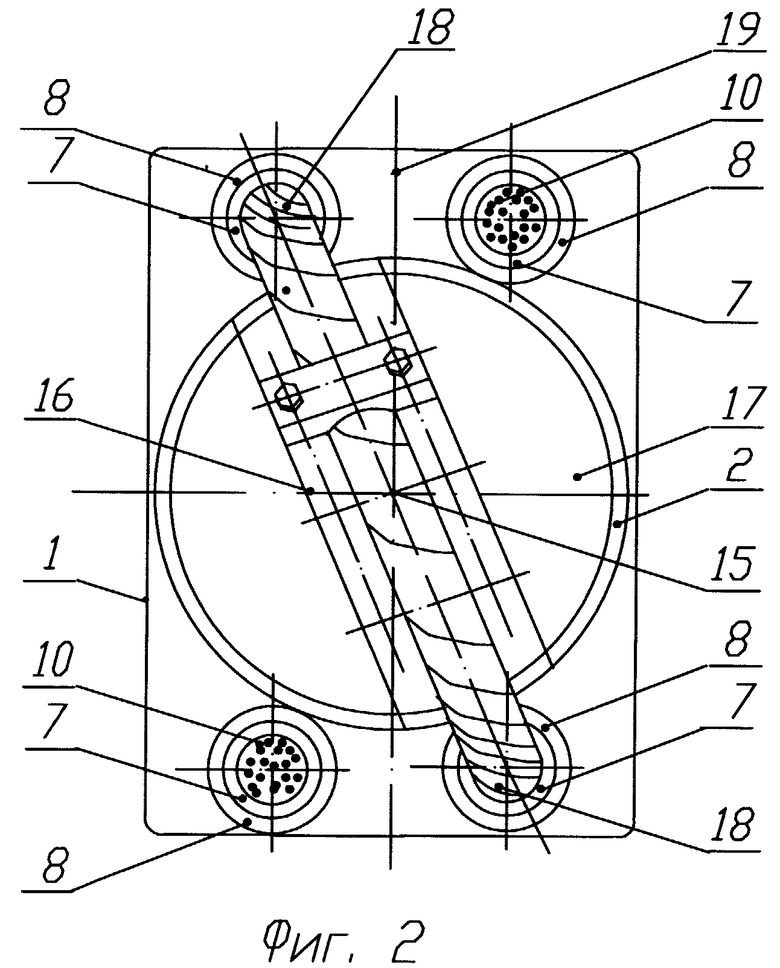
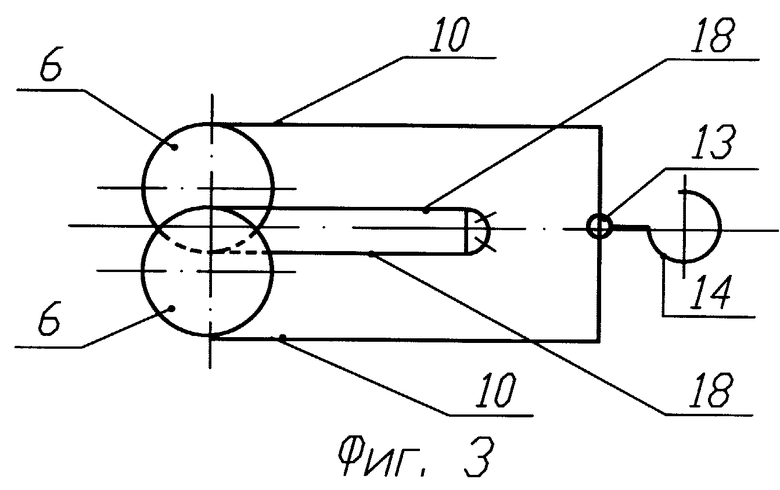
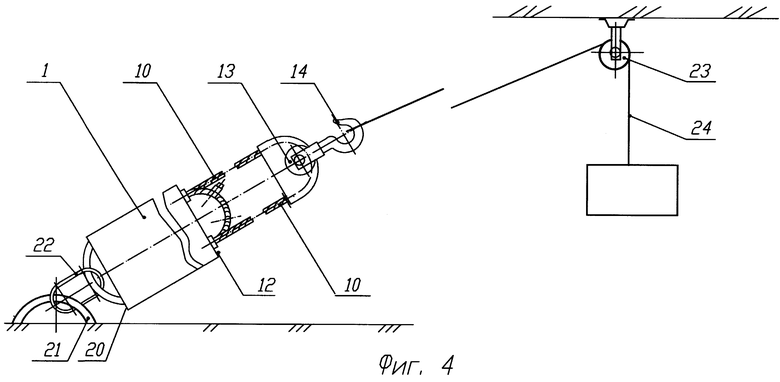
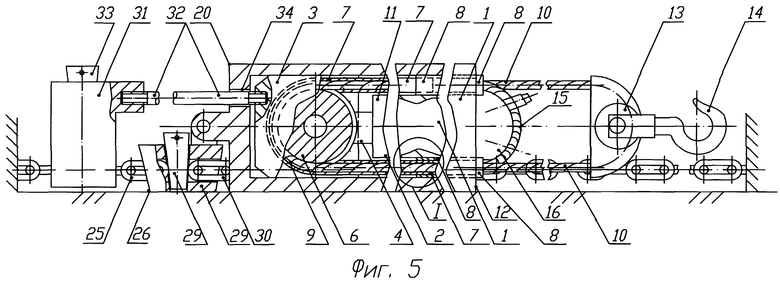
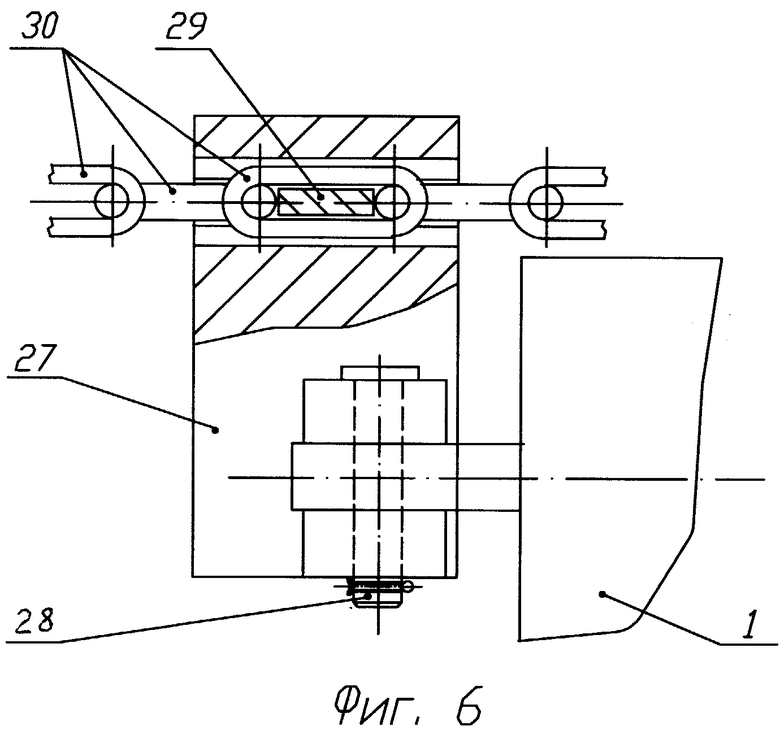
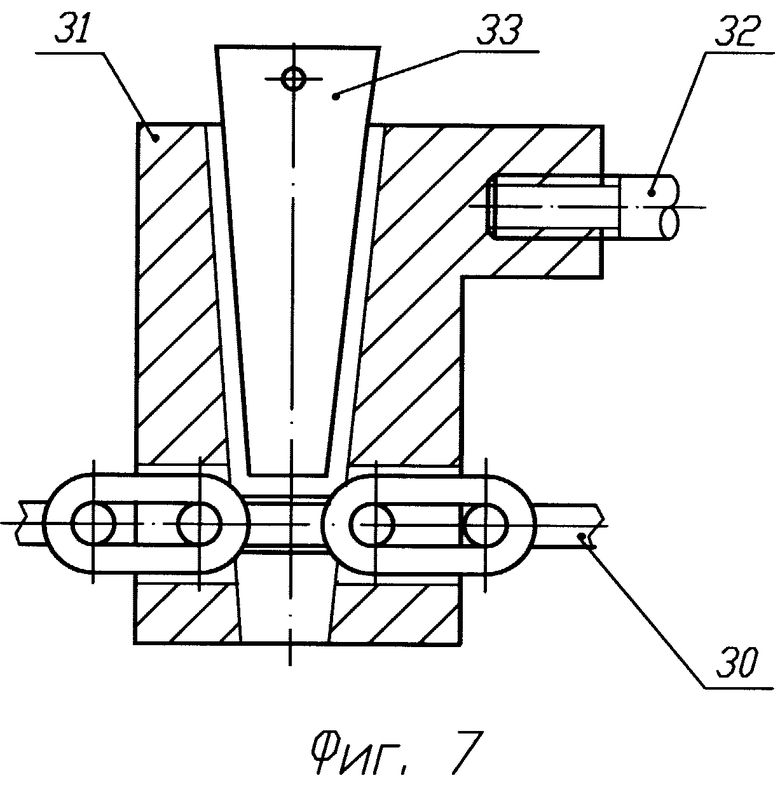
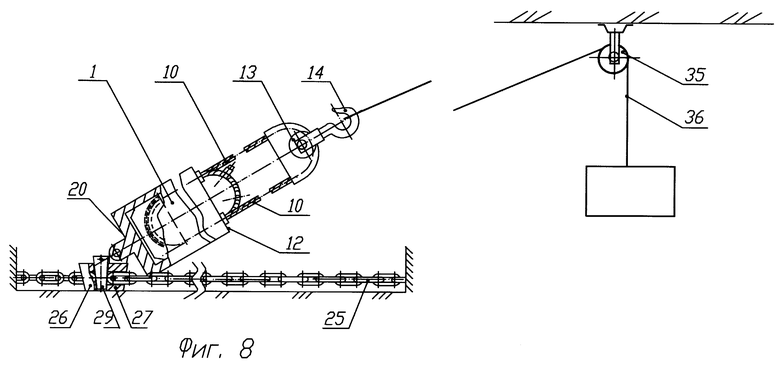
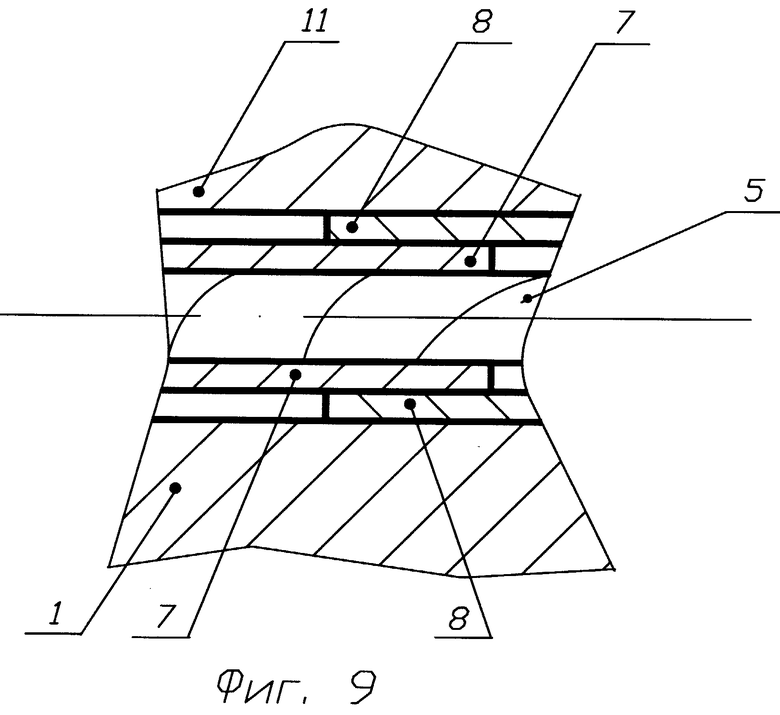
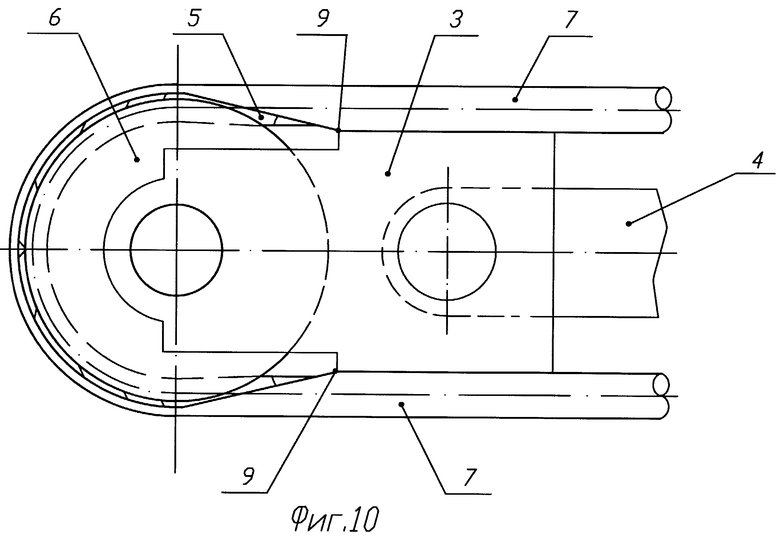
На фиг. 1 изображено описываемое устройство, общий вид (положение устройства для перемещения груза по горизонтали), первый вариант; на фиг.2 - разрез по А-А фиг.1; на фиг.3 - схема запасовки каната в устройстве; на фиг. 4 - то же, что на фиг.1 (положение устройства для перемещения груза по вертикали); на фиг. 5 изображено описываемое устройство, общий вид (положение устройства для перемещения груза по горизонтали), второй вариант; на фиг.6 - вид по стрелке Б фиг.5; на фиг.7 - зажимной фиксатор, размещенный на цепи, продольное сечение; на фиг.8 - то же, что на фиг.5, положение устройства для перемещения груза по вертикали; фиг.9 - узел I фиг.1 и фиг.5; на фиг.10 - подвижная труба, огибающая посредством выреза блок подвижной обоймы.
В первом варианте устройство для перемещения груза содержит корпус 1, в котором установлены привод, выполненный в виде гидродомкрата 2, и подвижная обойма 3 грузового полиспаста, закрепленная на штоке 4 гидродомкрата 2, и канат 5 грузового полиспаста, выполненный замкнутым и охватывающий блоки 6 подвижной обоймы 3 с возможностью размещения его ветвей вдоль продольной оси устройства в телескопически связанных подвижных 7 и неподвижных 8 трубах. Причем подвижные трубы 7 огибают блоки 6 подвижной обоймы 3 посредством выреза 9, выполненного в каждой из этих труб по длине контактирования каната 5 с блоками 6 (фиг.10).
Причем одни из ветвей 10 каната 5 размещены в одних из телескопически связанных подвижных и неподвижных трубах 7 и 8, расположенных диаметрально противоположно относительно цилиндра 11 гидродомкрата 2.
Чтобы ветви 10 каната 5 могли выполнять функцию тяговых ветвей, каждая из которых охватывает соответственно блок 6 подвижной обоймы 3, они выведены из соответствующих неподвижных труб 8 наружу, а также из торцевой части 12 корпуса 1 на длину не менее двойного хода штока 4 гидродомкрата 2, с возможностью закрепления их концов на блоке 13, имеющем захват 14 для груза и расположенным соосно с продольной осью гидродомкрата 2.
При этом канат 5 своей средней частью 15 жестко закреплен с помощью сегмента 16 на торце 17 цилиндра 11 гидродомкрата 2 с возможностью образования других (нетяговых) ветвей 18 полиспаста, расположенных в других из телескопически связанных подвижных и неподвижных трубах 7 и 8 и параллельно ветвям 10 (тяговым) каната 5 (фиг.1, 2, 3).
Телескопически связанные подвижные 7 и неподвижные 8 трубы для тяговых ветвей 10 каната 5 кроме того, что они размещены диаметрально противоположно относительно цилиндра 11 гидродомкрата 2, они также размещены с противоположных сторон от соответствующей, например, вертикальной оси 19 цилиндра 11 гидродомкрата 2, как это показано на фиг.2.
Причем параллельно упомянутым трубам для тяговых ветвей 10 расположены соответствующие телескопически связанные подвижные 7 и неподвижные 8 трубы для других ветвей 18 полиспаста.
На фиг.1 показаны следующие вырывы в устройстве: корпуса 1 вдоль продольной оси устройства; первого блока 6, одной ветви 10, охватывающей этот блок, и телескопической связи подвижной 7 и неподвижной 8 труб ниже продольной оси устройства до его вертикальной оси; второго блока 6, второй ветви 10, охватывающей этот блок, и подвижной трубы 7 для упомянутой ветви 10 выше продольной оси устройства за его вертикальной осью; телескопической связи подвижных 7 и неподвижных 8 труб выше продольной оси устройства до его вертикальной оси.
Кроме того, корпус 1 своей торцевой частью 20 со стороны расположения подвижной обоймы 3 соединен с опорой 21 с возможностью поворота устройства относительно опоры и посредством промежуточного элемента 22, например отрезка цепи.
Устройство для перемещения груза по горизонтали по первому варианту работает следующим образом.
В исходном положении шток 4 гидродомкрата 2 сокращен, подвижные трубы 7 вдвинуты в неподвижные трубы 8, т.е. находятся в максимальной телескопической связи между собой, каждая тяговая ветвь 10 каната 5 выходит из корпуса наружу на длину не менее двойного хода штока 4 гидродомкрата 2, захват 14 прицеплен к перетягиваемому грузу (не показан).
Включив гидродомкрат 2 на выдвижение его штока 4, последний воздействует на подвижную обойму 3 и тянет тяговые ветви 10 каната 5 в сторонe блоков 6, которые по мере их перемещения выбирают часть своей длины, равной двойному ходу штока 4. При этом ветви 10 каната 5 скользят по неподвижным трубам 8, затем по подвижным трубам 7, которые, в свою очередь, выдвигаются из неподвижных труб 8. Далее каждая тяговая ветвь 10 каната 5 обегает свой блок 6 через вырез 9 в подвижной трубе 7 и переходит в другую ветвь 18, которая перемещается по подвижной трубе 7, выдвигаемой из неподвижной трубы 8. После этого уже каждая ветвь 18 следует к месту закрепления средней части 15 каната 5, т.е. на торце 17 цилиндра 11 гидродомкрата 2. По мере выбора длины тяговых ветвей 10 каната 5 происходит перетягивание груза на расстояние, равное двукратной величине хода штока 4 гидродомкрата 2.
После перемещения груза по горизонтальной поверхности канат 5 возвращают в исходное положение под действием сокращения штока 4 гидродомкрата 2.
Причем в процессе перемещения груза достигается равномерное распределение тягового усилия на ветви 10 каната 5 за счет ориентирования устройства вдоль его продольной оси прямолинейно по отношению к перетягиваемому грузу без образования плеча (как это имеет место в прототипе), обусловленного соединением торцевой части 20 корпуса 1 с опорой 21 через промежуточный элемент 22 вдоль продольной оси устройства, совпадающим с направлением его перемещения.
Для перемещения устройства на новое место в зоне его действия необходимо переставить опору 21, в качестве которой могут быть использованы, например, анкер, скоба, кронштейн и другие подобные средства.
В случае использования устройства для подъема (или опускания) груза торцевую часть 20 корпуса 1 поворачивают вокруг промежуточного элемента 22 в направлении отводного блока 23, через который пропущен строп 24 для подъема или опускания груза (фиг.4).
Принцип действия устройства в этом случае аналогичен принципу его действия при перемещении груза по горизонтали. В случае необходимости изменения зоны действия устройства его вновь поворачивают вокруг промежуточного элемента 22, и оно работает по вышеописанному принципу.
Отличительной особенностью второго варианта по сравнению с первым вариантом является то, что в качестве опоры 21 используют цепь 25, закрепленную между двумя упорами и расположенную вдоль корпуса 1 по одну из его сторон. При этом торцевая часть 20 корпуса 1 со стороны расположения подвижной обоймы 3 соединена с цепью 25 посредством фиксатора 26, имеющего корпус 27, который посредством шарнира 28 соединен с торцевой частью 20 корпуса 1 и в котором расположен клин 29, вставленный в одно из звеньев 30 цепи 25, причем длина цепи 25 соответствует протяженности зоны действия устройства (фиг.5, 6).
Указанное отличие обеспечивает поворот устройства из горизонтального положения в вертикальное положение и наоборот за счет наличия шарнирной связи торцевой части 20 корпуса 1 с фиксатором 26.
Кроме того, чтобы обеспечить возможность передвижения устройства на новое место в зоне его действия, т.е. в пределах закрепленной между упорами цепи 25, последняя оснащена дополнительным фиксатором 31, взаимодействующим с подвижной обоймой 3 посредством тяги 32, а непосредственно с цепью 25 - посредством, например, клина 33. В свою очередь, тяга 32 проходит через сквозное отверстие 34 в торцевой части 20 корпуса 1 (фиг.5, 7).
Принцип работы устройства по второму варианту для перемещения груза по горизонтали (фиг.5) аналогичен принципу работы устройства по первому варианту (фиг.1) за исключением того, что в исходном положении клин 29 корпуса 27 вставлен в звено 30 цепи 25, которое имеет горизонтальное положение, дополнительный фиксатор 31 находится рядом с фиксатором 26, а его тяга 32 вдвинута в корпус 1, клин 33 фиксатора 31 не вставлен в звено 30 цепи 25 (фиг.7).
В процессе работы устройства по перетягиванию груза по горизонтали (описано в первом варианте) одновременно происходит выдвижение тяги 32 из корпуса 1 через отверстие 34 и соответственно смещение дополнительного фиксатора 31 по цепи 25 на длину, равную величине хода штока 4 гидродомкрата 2.
После перетягивания груза устройством, как это было описано в первом варианте, приступают к передвижению его на новое место в пределах зоны его действия.
Для чего вставляют клин 33 дополнительного фиксатора 31 в звено 30 цепи 25, а клин 29 фиксатора 26 вытаскивают из звена 30 цепи 25. После этого включают гидродомкрат 2 на сокращение штока 4, и корпус 1 передвигается по тяге 32 вдоль цепи 25, поскольку цепь 25 жестко связана с тягой 32, одновременно с этим передвигается по цепи 25 и фиксатор 26.
По мере сокращения штока 4 гидродомкрата 2 перемещается корпус 1 совместно с неподвижными трубами 8, при этом подвижная обойма 3 не перемещается, а канат 5 проталкивается в упомянутые трубы 7 и 8 по мере их телескопического сдвижения, удлиняя таким образом тяговые ветви 10 на величину, равную величине двойного хода штока 4 гидродомкрата 2. После этого клин 33 вытаскивают из звена 30 цепи 25, а клин 29 фиксатора 26 вставляют в другое звено 30 этой цепи.
В результате выполнения описанных операций устройство приведено в исходное положение и готово для дальнейшего перемещения груза по горизонтали в пределах заданной зоны его действия (фиг.5).
Для выполнения дальнейших работ по перемещению груза в упомянутой зоне его действия не только по горизонтали, но и по вертикали (подъем или опускание) необходимо вынуть клин 33 дополнительного фиксатора 31 из звена 30 цепи, отсоединив таким образом фиксатор 33 с тягой 32 от устройства. После этого устройство поворачивают вокруг шарнира 28 на заданный угол в вертикальной плоскости.
На фиг. 8 показано положение устройства для перемещения груза по вертикали (подъем пли опускание), в котором оно закреплено торцевой частью 20 корпуса 1 на цепи 25 через фиксатор 20, а вторая торцевая часть 12 корпуса 1 занимает положение в направлении отводного блока 35, через который пропущен строп 36 для подъема или опускания груза.
Причем принцип действия устройства по перемещению груза по вертикали (подъем или опускание), изображенного на фиг.4 и 8, аналогичен принципу действия по перемещению груза по горизонтали (фиг.1, 5).
Предложенное устройство в обоих вариантах обеспечивает преимущества по сравнению с прототипом (2).
В данном устройстве тяговое усилие передается на обе ветви каната грузового полиспаста вследствие изменения схемы запасовки, которая выполнена симметричной относительно продольной оси устройства с жестким закреплением на торце цилиндра гидродомкрата средней части каната. То есть предложенная схема запасовки каната улучшает техническую характеристику устройства по тяговому усилию.
Обеспечивается изменение положения устройства из горизонтальной плоскости в вертикальную плоскость и наоборот, что расширяет его функциональные возможности.
Обеспечивается самопередвижение устройства во втором варианте на новое место в зоне его действия без применения дополнительных средств и трудозатрат.
Из сказанного следует, что улучшаются эксплуатационные качества устройства, а следовательно, повышается эффективность его использования при расширении зоны обслуживания им.
Источники информации, принятые во внимание при составлении описания изобретения
1. Авторское свидетельство СССР 313765, кл. В 66 В 1/04, 1970.
2. Патент Российской Федерации 1763337, кл. В 66 В 9/00, 1990 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНАТОУКЛАДЧИК ДЛЯ ЛЕБЕДОК | 2001 |
|
RU2209176C2 |
| СПОСОБ МОНТАЖА МЕХАНИЗИРОВАННОЙ КРЕПИ ОЧИСТНЫХ КОМПЛЕКСОВ (ВАРИАНТЫ) И ПОГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2186218C1 |
| ТЕЛЕСКОПИЧЕСКАЯ ГОЛОВКА СКРЕБКОВОГО КОНВЕЙЕРА | 1997 |
|
RU2121458C1 |
| ЛИНЕЙНАЯ СЕКЦИЯ СКРЕБКОВОГО КОНВЕЙЕРА МЕХАНИЗИРОВАННОГО КОМПЛЕКСА | 1998 |
|
RU2151092C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ МОНТАЖА-ДЕМОНТАЖА СЕКЦИЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1994 |
|
RU2064586C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПЕРЕКРЫТИЯ С ГИДРОСТОЙКОЙ | 1999 |
|
RU2165024C2 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС | 2001 |
|
RU2185514C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ СОПРЯЖЕНИЯ ЛАВЫ СО ШТРЕКОМ | 1997 |
|
RU2134788C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ ГРУЗА В ГРУЗОВУЮ КАБИНУ ЛЕТАТЕЛЬНОГО АППАРАТА И ВЫГРУЗКИ ГРУЗА ИЗ НЕЕ | 2000 |
|
RU2186002C1 |
| Фронтальный очистной агрегат | 2002 |
|
RU2224111C1 |
Изобретение относится к грузоподъемным средствам и может быть использовано в угольной и других отраслях промышленности для подъема и горизонтального перемещения груза. Устройство, согласно вариантам выполнения, содержит корпус, в котором установлены привод в виде гидродомкрата и подвижная обойма грузового полиспаста, закрепленная на штоке гидродомкрата, и канат грузового полиспаста. Канат образует ветви, расположенные вдоль продольной оси устройства в телескопически связанных подвижных и неподвижных трубах, расположенных параллельно друг другу. Согласно вариантам выполнения устройства, канат выполнен замкнутым таким образом, что одни из его ветвей выведены из соответствующих неподвижных труб и из торцевой части корпуса с возможностью закрепления их концов на блоке, имеющем захват для груза. Канат своей средней частью жестко закреплен с помощью сегмента на торце цилиндра гидродомкрата. Телескопически связанные подвижные и неподвижные трубы расположены диаметрально противоположно относительно цилиндра гидродомкрата и с противоположных сторон от его соответствующей оси. Согласно первому варианту, гидроцилиндр соответствующей торцевой частью соединен с опорой с возможностью поворота устройства относительно нее посредством промежуточного элемента, например отрезка цепи. Согласно второму варианту, в качестве опоры используют цепь, закрепленную между двумя упорами и расположенную вдоль корпуса по одну из его сторон, а соответствующая торцевая часть соединена с упомянутой цепью посредством фиксатора, имеющего корпус, шарнирно соединенный с указанной частью корпуса устройства, и клин, вставленный в одно из звеньев этой цепи, причем длина цепи соответствует протяженности зоны действия устройства. Устройство может быть снабжено дополнительным фиксатором, взаимодействующим с подвижной обоймой посредством тяги, проходящей через сквозное отверстие в корпусе устройства. Изобретение обеспечивает улучшение эксплуатационных характеристик путем увеличения тягового усилия. 2 с. и 1 з.п. ф-лы, 10 ил.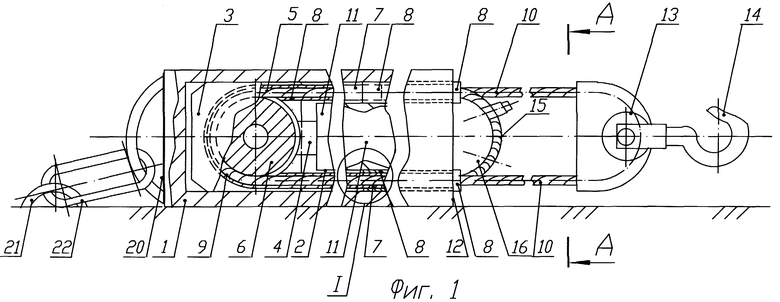
| Подъемник | 1990 |
|
SU1763337A1 |
| Гидрополиспаст | 1988 |
|
SU1601083A1 |
| Гидравлический лифт | 1980 |
|
SU908728A2 |

