Изобретение относится к грузозахватным устройствам и может применяться в промышленности общего машиностроения, а также в любых отраслях народного хозяйства (автомобилестроение, народное хозяйство и т.д.).
Известна лебедка, содержащая зубчатую планетарную передачу, в которой сателлит установлен на игольчатый подшипник (а.с. 1744051). Недостатком указанной лебедки являются заклинивание при ее работе, т.к. необходима смазка игольчатого подшипника, которая вытесняется при вращении сателлита.
Известна ручная лебедка (а.с. 1733368), содержащая цепной орган и тормозной механизм с пакетом тормозных колодок, которые перемещаются в осевом направлении гайкой с трапецеидальной резьбой.
Недостатком известной лебедки являются ее низкие эксплуатационные характеристики, т. к. при торможении требуется значительное вращение гайки на большой угол, а при расторможении необходимо прилагать большое усилие.
Технической задачей изобретения является повышение надежности и удобства в эксплуатации за счет исключения заклинивания, а также снижение усилия на рукоятке.
Техническая задача решается тем, что в лебедке, содержащей цепной грузовой механизм, планетарный редуктор с сателлитами, тормозной механизм с механическим приводом и рукоятку, причем сателлиты планетарного редуктора установлены на металлофторополастовых подшипниках, при этом механический привод тормозного механизма выполнен из двух подпружиненных полумуфт, взаимодействующих с валом-шестерней тормозного механизма, причем полумуфты представляют собой две втулки с торцевыми кулачками в виде винтовой поверхности большого шага, при этом одной из полумуфт соединены шлицы, взаимодействующие с подпружиненной собачкой, установленной в рукоятке, причем тормоз посредством кольца упорного взаимодействует через вал, шестерню и сателлиты с барабаном. На фиг.1 представлен общий вид малогабаритной ручной лебедки.
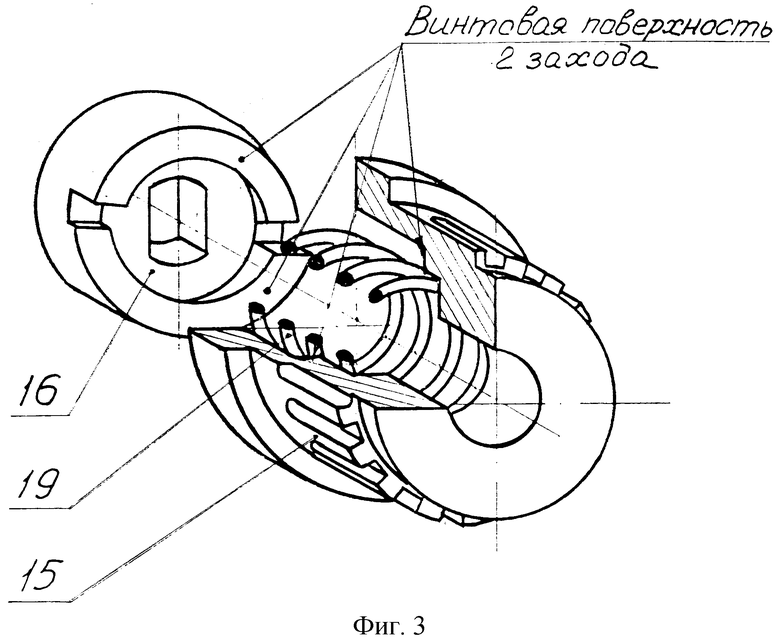
Малогабаритная ручная лебедка (см. фиг.1, фиг.2, фиг.3) содержит корпус 1 с барабаном 2 на радиальных шарикоподшипниках 3, переброшенную через барабан 2 грузовую цепь 4 с грузозахватным крюком 5. Планетарный редуктор содержит колесо 6, водило 7 и два сателлита 8, установленных на металлофторопластовых подшипниках 9. Ведущая вал-шестерня 10, проходя через барабан 2, за счет сателлитов 8 разгружена от поперечных нагрузок и не нуждается в специальных подшипниках. На конце вала-шестерни 10 установлен тормозной механизм, состоящий из храпового колеса 11 в двух фрикционных колец 12, кольца упорного 13, связанного с валом-шестерней 10, собачки 14 и механического привода. Механический привод тормоза состоит из двух подпружиненных полумуфт 15,16, закрепленных на валу-шестерне 10 гайкой 17, шайбой стопорной 18 и пружиной 19. Полумуфты привода представляют собой втулки с торцевыми кулачками в виде двух отрезков двухзаходной винтовой поверхности. В рукоятке 20, которая выполнена полой, установлена подпружиненная собачка 21, которая взаимодействует со шлицами полумуфты 15. Тормозной механизм взаимодействует через кольцо упорное 13, вал-шестерню 10 и сателлиты 8 с барабаном 2. Планетарный редуктор, барабан 2, тормозной механизм и рукоятка 20 расположены на одной оси. Малогабаритная ручная лебедка работает следующим образом.
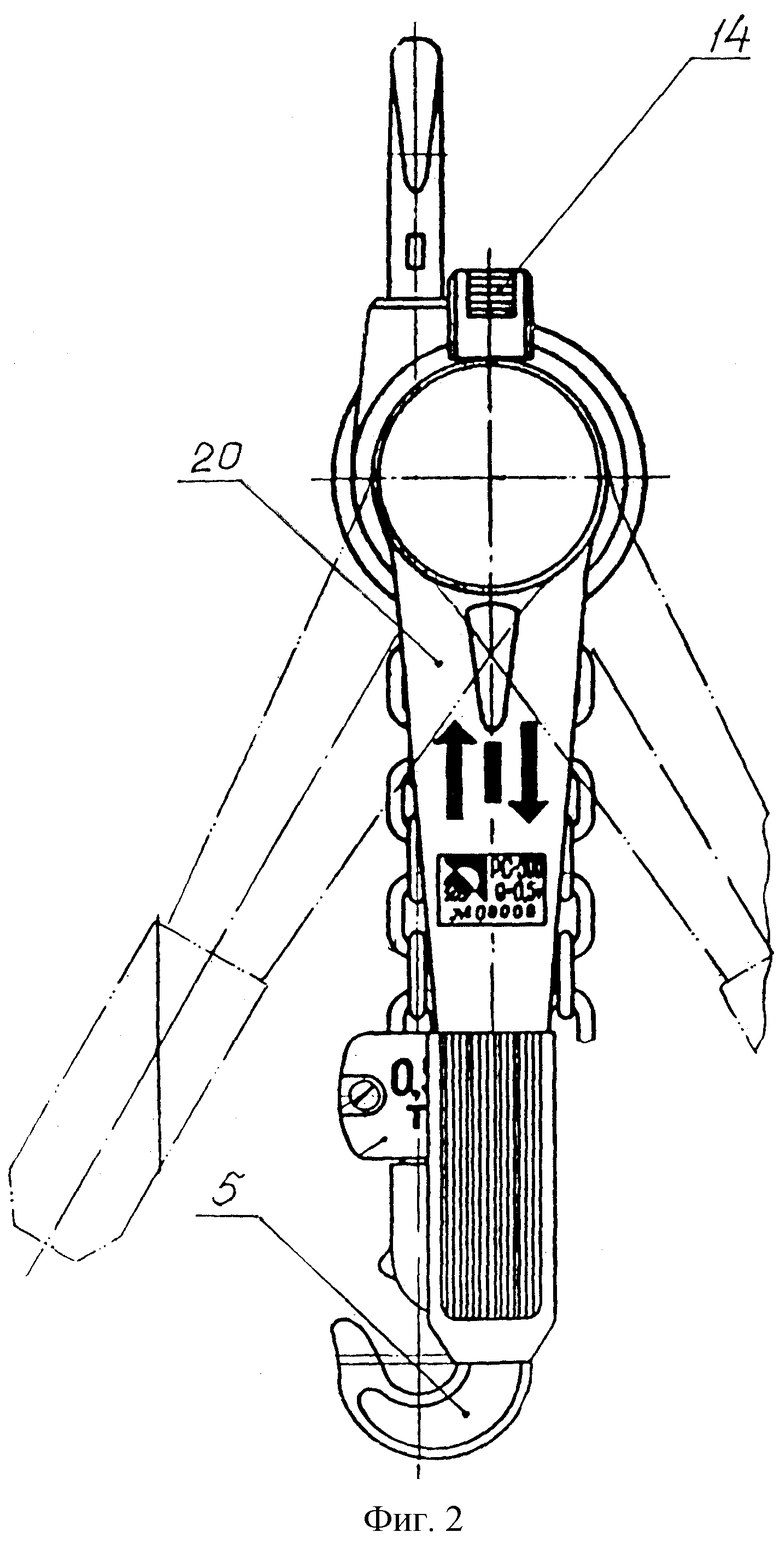
Для подъема груза переключатель на рукоятке 20 устанавливается в положение  (фиг.2). При равномерном качании рукоятки 20 собачка 21 через шлицы поворачивает полумуфту 15, храповое колесо 11, кольцо упорное 13, вал-шестерню 10 и сателлиты 8. Сателлиты 8, обкатываясь по колесу 6, поворачивают водило 7 и через шпоночное соединение 22 поворачивают барабан 2.
(фиг.2). При равномерном качании рукоятки 20 собачка 21 через шлицы поворачивает полумуфту 15, храповое колесо 11, кольцо упорное 13, вал-шестерню 10 и сателлиты 8. Сателлиты 8, обкатываясь по колесу 6, поворачивают водило 7 и через шпоночное соединение 22 поворачивают барабан 2.
Для спуска груза переключатель устанавливается в положение  . При качании рукоятки 20 полумуфта 15 поворачивается в сторону растормаживания тормозного механизма. Барабан 2 поворачивается под действием груза, отслеживает вращение тормозной полумуфты 15.
. При качании рукоятки 20 полумуфта 15 поворачивается в сторону растормаживания тормозного механизма. Барабан 2 поворачивается под действием груза, отслеживает вращение тормозной полумуфты 15.
Таким образом, тормозной механизм под действием груза работает как астатическая следящая система. Ускоренное перемещение грузозахватного крюка 5 в положении строповки груза (движение цепи вверх или вниз без груза) происходит при выводе из зацепления или при нейтральном положении собачки 2 рукоятки 20 (движение грузозахватного крюка только вверх).
Предложенное техническое решение надежно в эксплуатации за счет исключения заклинивания при работе лебедки, а также при растормаживании, что повышает эксплуатационные свойства лебедки. Предложенная лебедка компактна, имеет малый вес (5-6 кг) и удобна в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручная лебедка | 1985 |
|
SU1258809A1 |
| СОЛНЕЧНАЯ БАТАРЕЯ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2167793C2 |
| Ручная лебедка | 1989 |
|
SU1791358A1 |
| ЛЕБЕДКА С ПРИВОДОМ ОТ РАЗДАТОЧНОЙ КОРОБКИ ТРАНСПОРТНОГО СРЕДСТВА ТИП КАМЛЮКА | 1997 |
|
RU2179948C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2176950C2 |
| ИНДИВИДУАЛЬНЫЙ ЭВАКУАТОР | 2006 |
|
RU2326807C2 |
| ЛЕБЕДКА | 2001 |
|
RU2192385C1 |
| УСТРОЙСТВО НАДУВНОЙ ПАССИВНОЙ СИСТЕМЫ ТОРМОЖЕНИЯ ПОСЛЕДНЕЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 2000 |
|
RU2199474C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 1995 |
|
RU2084395C1 |
| ТРАВЕРСА | 2002 |
|
RU2225826C1 |
Изобретение относится к грузоподъемным устройствам, в частности к ручным лебедкам. Малогабаритная ручная лебедка содержит цепной грузовой механизм, планетарный редуктор с сателлитами, тормозной механизм с механическим приводом и рукоятку, причем сателлиты планетарного редуктора установлены на металлофторопластовых подшипниках. Согласно изобретению механический привод тормозного механизма выполнен из двух подпружиненных полумуфт, взаимодействующих с валом-шестерней тормозного механизма, причем полумуфты представляют собой две втулки с торцевыми кулачками в виде двухзаходной винтовой поверхности большого шага. На одной из полумуфт выполнены шлицы, взаимодействующие с подпружиненной собачкой, установленной в рукоятке. Тормоз посредством кольца упорного взаимодействует через вал-шестерню и сателлиты с барабаном. Изобретение позволяет повысить надежность и удобство эксплуатации. 3 ил.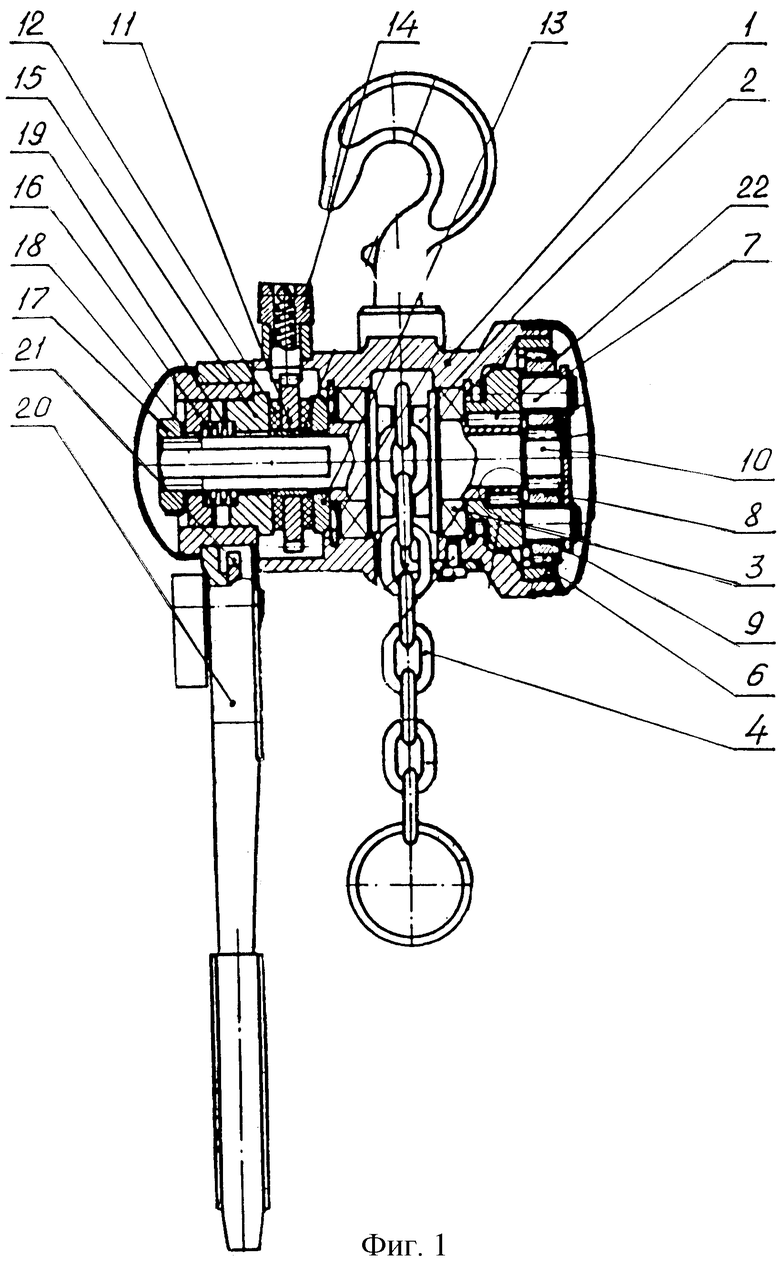
Малогабаритная ручная лебедка, содержащая цепной грузовой механизм, планетарный редуктор с сателлитами, тормозной механизм с механическим приводом и рукоятку, причем сателлиты планетарного редуктора установлены на металлофторопластовых подшипниках, отличающаяся тем, что механический привод тормозного механизма выполнен из двух подпружиненных полумуфт, взаимодействующих с валом-шестерней тормозного механизма, причем полумуфты представляют собой две втулки с торцевыми кулачками в виде двухзаходной винтовой поверхности большого шага, при этом на одной из полумуфт выполнены шлицы, взаимодействующие с подпружиненной собачкой, установленной в рукоятке, причем тормоз посредством кольца упорного взаимодействует через вал-шестерню и сателлиты с барабаном.
| Ручная лебедка | 1990 |
|
SU1733368A1 |
| Пространственное покрытие зданияпРяМОугОльНОй фОРМы B плАНЕ | 1979 |
|
SU808634A1 |
| ЭЛЕКТРОНАСОС | 1990 |
|
RU2021546C1 |

