Изобретение относится к области автоматики и гидравлики и может применяться в электрогидравлических следящих системах, в том числе в системах наведения и стабилизации вооружения объектов бронетехники.
К моментным гидроприводам предъявляются высокие требования по диапазону скоростей, габаритам и быстродействию.
Известны моментные гидроприводы, например, в электрогидравлической системе стабилизации танка "Леопард" [1], содержащие гидроусилитель, исполнительный гидродвигатель.
Наиболее близким к предлагаемому является устройство [2], содержащее гидроусилитель, включающий гидронасос (источник рабочей жидкости) и электрогидравлический усилитель мощности, исполнительный гидродвигатель с двумя полостями, пополнительный гидробак (место забора и слива рабочей жидкости).
Недостатком является невозможность увеличения диапазона скоростей путем увеличения производительности гидронасоса без увеличения габаритов и снижения быстродействия из-за недопустимого нагрева рабочей жидкости при постоянном увеличенном потоке рабочей жидкости (производительности) гидронасоса независимо от времени работы гидропривода с большими скоростями в случае сохранения размеров электрогидравлического усилителя мощности, увеличение размеров электрогидравлического усилителя мощности приводит к увеличению его инерционности и, как следствие, к снижению быстродействия гидропривода.
Предлагаемое изобретение направлено на увеличение диапазона скоростей при сохранении габаритов и быстродействия моментного гидропривода за счет кратковременного увеличения расхода (потока рабочей жидкости) через электрогидравлический усилитель мощности только на период работы гидропривода с большой скоростью при постоянном увеличенном потоке рабочей жидкости (производительности) гидронасоса.
Это достигается тем, что в моментный гидропривод, содержащий гидроусилитель, включающий гидронасос и электрогидравлический усилитель мощности, исполнительный гидродвигатель с двумя полостями, пополнительный гидробак, введены клапан ИЛИ и регулятор давления, при этом входы клапана ИЛИ соединены с полостями исполнительного гидродвигателя, а выход соединен с управляющим входом регулятора давления, регулирующий вход которого соединен с полостью нагнетания гидронасоса.
Такое выполнение предлагаемого изобретения позволяет увеличить диапазон скоростей моментного гидропривода без увеличения габаритов и снижения быстродействия.
Сущность изобретения поясняется чертежом, где приведена примерная принципиальная гидравлическая схема моментного гидропривода.
Моментный гидропривод включает гидронасос 1 постоянной производительности, электрогидравлический усилитель мощности, содержащий моментный управляющий электромагнит 2, корпус 3, управляющие золотники 4 и 5 с поршнями 6 и 7 обратной связи по давлению соответственно, исполнительный гидроцилиндр (гидродвигатель) 8 с поршнем 9, клапан ИЛИ 10, регулятор давления 11, пополнительный гидробак 12.
Полость нагнетания гидронасоса 1 соединена с полостями 13 и 14 управляющих золотников 4 и 5 соответственно, а также с регулирующим входом регулятора давления 11. Рабочая жидкость с давлением нагнетания рн из полостей 13 и 14 через дросселирующие щели между золотниками 4, 5 и корпусом 3, в которых теряется часть давления, поступает в полости 15 и 16 уже с меньшим давлением. При протекании жидкости далее через щели между золотниками и корпусом в полости 17 и 18 и в пополнительный гидробак 12 давление снижается до давления слива рсл. Из полостей 15 и 16 по поперечным и продольным каналам в золотниках 4 и 5 рабочая жидкость поступает к поршням обратной связи по давлению 6 и 7, в полости 19 и 20 исполнительного гидроцилиндра, а также на входы клапана ИЛИ 10.
1. При отсутствии управляющего сигнала на электромагните 2 и отсутствии усилия на поршень 9 и, соответственно, отсутствии перемещения поршня 9 исполнительного гидроцилиндра 8 электромагнит 2 не развивает механический момент, управляющие золотники 4 и 5 находятся в начальном положении, при котором в полостях 15 и 16 давление жидкости близко по величине давлению в полостях 17 и 18, т.е. практически равно давлению слива рсл. Равные давления рсл поступают из полостей 15 и 16 в полости 19 и 20 исполнительного гидроцилиндра 8 и на входы клапана ИЛИ 10. С выхода клапана ИЛИ 10 это давление рсл поступает на управляющий вход регулятора давления 11. Гидравлическое сопротивление регулятора давления 11 является наименьшим, во много раз меньшим, чем гидравлическое сопротивление электрогидравлического усилителя мощности (гидравлическое сопротивление управляющих золотников 4 и 5). В этом случае практически вся нагнетаемая гидронасосом 1 жидкость протекает через регулирующий вход регулятора давления 11, сам регулятор давления 11 на слив в пополнительный бак 12. Величина давления в полости нагнетания гидронасоса 1 рн определяется низким гидравлическим сопротивлением регулятора давления 11.
Давление рн в полости нагнетания гидронасоса 1 низкое.
2. При поступлении сигнала управления, но при отсутствии перемещения поршня 9 гидроцилиндра 8 (при стопорении поршня 9), на моментном управляющем электромагните 2 возникает механический момент, направление и величина которого зависят от полярности и величины сигнала управления. Электромагнит 2 воздействует на управляющий золотник, например, 4 и смещает его вниз пропорционально управляющему сигналу, в полости 15 давление возрастает pсл+Δp, через каналы золотника 4 это давление pсл+Δp воздействует на поршень 6 обратной связи по давлению, создавая силовое обратное воздействие на управляющий электромагнит. При равенстве механического управляющего момента электромагнита 2 и усилия (момента) от давления обратной связи золотник 4 остановится. Давление pсл+Δp из полости 15, зависящее от величины перемещения управляющего золотника 4, поступает в полость 19 исполнительного гидроцилиндра 8 и одновременно на один из входов клапана ИЛИ 10. Давление в полостях 16, 20 и на втором входе клапана ИЛИ остается практически прежним, равным давлению слива рсл.
Давление pсл+Δp поступает с выхода клапана ИЛИ (клапан ИЛИ пропускает наибольшее из двух входных давлений) на управляющий вход регулятора давления 11. На регуляторе давления 11 возрастает гидравлическое сопротивление для жидкости, поступающей из полости нагнетания гидронасоса 1, соответственно возрастает давление нагнетания рн пропорционально управляющему сигналу.
Возросшее гидравлическое сопротивление регулятора давления 11 при отсутствии перемещения поршня 9 остается значительно меньше гидравлического сопротивления электрогидравлического усилителя мощности - практически весь поток рабочей жидкости, как и в разделе 1, проходит через регулятор давления 11.
3. При поступлении сигнала управления и при наличии возможности перемещения поршня 9, при его расстопорении, режим наведения объекта вооружения, процессы, происходящие в моментном гидроприводе, аналогичны разделу 2. Давление в полости нагнетания гидронасоса 1 рн и разность давлений в полостях 19 и 20 исполнительного гидроцилиндра также пропорциональны управляющему сигналу. Отличие только в том, что гидравлическое сопротивление электрогидравлического усилителя мощности уменьшается из-за смещения, как и в разделе 2, золотника 4 вниз и подключения полости 19 исполнительного гидродвигателя через полость 15 практически к полости 13, и количество рабочей жидкости, протекающей через золотники 4 и 5, увеличится за счет снижения потока жидкости через регулятор давления 11 на величину, необходимую на заполнение объема увеличивающейся полости 19 исполнительного гидроцилиндра 8, и только на время, необходимое для осуществления движения поршня 9. При этом, чем больше будет давление рн, тем больше будет усилие, развиваемое поршнем 9 для преодоления противодействующего усилия, и больше будет ускорение поршня 9 при постоянной статической нагрузке на поршень.
4. При отсутствии управляющего сигнала и при наличии относительного перемещения поршня 9 и корпуса исполнительного гидроцилиндра 8, режим стабилизации объекта вооружения, т.е. сохранение положения поршня при перемещении вдоль оси корпуса гидроцилиндра 8, электромагнит 2 не развивает механический момент. Однако сам корпус гидроцилиндра 8 начинает перемещаться относительно поршня 9, например, в сторону уменьшения объема полости 19. При сохранении положения поршня 9 рабочая жидкость в полости 19 сжимается, в ней несколько увеличивается давление на величину Δp1, оно станет pсл+Δp1. Из полости 19 давление pсл+Δp1 поступит в полость 15 и через поперечный и продольный каналы золотника 4 - к поршню 6. Поршень 6 обратной связи по давлению переместит золотник 4 вверх, соединяя полость 15 с полостью 17, т.е. со сливом, обеспечивая свободный слив жидкости из уменьшаемой полости 19 гидроцилиндра 8. Перемещение золотника 4 вверх вызывает одновременное перемещение золотника 5 вниз, соединяя полость 16, а с ней и полость 20 с полостью 14, т.е. с полостью нагнетания гидронасоса 1, снижая аналогично разделу 3 гидравлическое сопротивление электрогидравлического усилителя мощности и обеспечивая заполнение за счет снижения потока жидкости через регулятор давления 11 увеличивающейся полости 20 гидроцилиндра 8. Давление pсл+Δp1 из полости 19 одновременно поступает через клапан ИЛИ на управляющий вход регулятора давления 11, увеличивает его гидравлическое сопротивление, соответственно увеличивая давление нагнетания рн гидронасоса 1, обеспечивая необходимый расход (поток жидкости) через золотник 5 в полость 20. При этом положение поршня 9 сохраняется, т.е. положение поршня стабилизируется.
Предлагаемый моментный гидропривод обеспечивает усилие (момент) исполнительного гидроцилиндра (гидродвигателя) пропорциональным управляющему сигналу как в режиме движения (наведения), так и в застопоренном режиме, а также обеспечивает слив и восполнение жидкости в полостях исполнительного гидроцилиндра (гидродвигателя) в режиме стабилизации, при этом протекание рабочей жидкости через управляющие золотники электрогидравлического усилителя мощности практически происходит только во время движения подвижных элементов (поршня) исполнительного гидродвигателя (гидроцилиндра), что позволяет применять для расширения диапазона выходных скоростей гидронасос более высокой производительности при сохранении габаритов и быстродействия.
Источники информации
1. "Зарубежная техника", серия III, выпуск 6, 1976 г.
2. Устройство по А.С. 922340, ОИПОТЗ, бюллетень 15, 1982 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОМЕНТНЫЙ ГИДРОПРИВОД | 2005 |
|
RU2305801C2 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2004 |
|
RU2272181C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2006 |
|
RU2322618C1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2000 |
|
RU2184281C2 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
Гидропривод предназначен для электрогидравлических следящих систем. Моментный гидропривод содержит гидроусилитель, включающий гидронасос и электрогидравлический усилитель мощности, исполнительный гидродвигатель с двумя полостями, пополнительный гидробак, при этом гидропривод содержит клапан ИЛИ и регулятор давления, причем входы клапана ИЛИ соединены с полостями исполнительного гидродвигателя, а выход соединен с управляющим входом регулятора давления, регулирующий вход которого соединен с полостью нагнетания гидронасоса. Технический результат: повышение надежности гидропривода. 1 ил.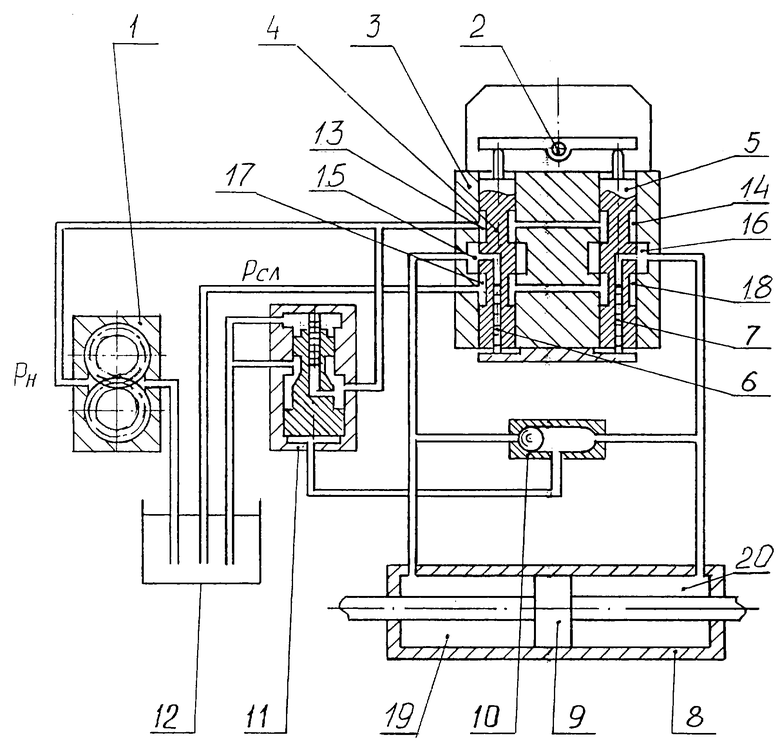
Моментный гидропривод, содержащий гидроусилитель, включающий гидронасос и электрогидравлический усилитель мощности, исполнительный гидродвигатель с двумя полостями, пополнительный гидробак, отличающийся тем, что содержит клапан ИЛИ и регулятор давления, при этом входы клапана ИЛИ соединены с полостями исполнительного гидродвигателя, а выход соединен с управляющим входом регулятора давления, регулирующий вход которого соединен с полостью нагнетания гидронасоса.
| Способ управления гидродвигателем и устройство для его осуществления | 1980 |
|
SU922340A1 |
| Электрогидравлический усилитель | 1986 |
|
SU1333872A1 |
| RU 2052673 С1, 20.01.1996 | |||
| Система радиосвязи с подвижными объектами | 1986 |
|
SU1401626A1 |
| US 3487750 A, 06.01.1970. | |||

