Изобретение относится к области гидроавтоматики и может быть использовано в силовых следящих гидроприводах, содержащих дистанционно управляемый регулируемый насос.
К силовым следящим гидроприводам предъявляются высокие требования по быстродействию и обеспечению точности отработки управляющих сигналов, вырабатываемых системой управления. Например, реакция силового следящего гидропривода на сброс управляющего сигнала, вызванная обрывом цепи электропитания системы управления, должна быть такой, чтобы останов объекта управления был практически немедленным.
Известны электрогидравлические автоматические приводы, управляемые дистанционно при помощи электрического сигнала [1, стр.23, 24]. В их состав входит регулируемый насос, гидравлически связанный с гидромотором, при этом управление регулируемым насосом осуществляется с помощью установленного на нем механизма управления, электрический управляющий сигнал на который поступает от усилителя. С учетом имеющихся в приводе компенсирующих и обратных связей он по технической сущности является силовой электрогидравлической следящей системой, обеспечивающей необходимые динамические свойства электрогидропривода.
Известны также механизмы управления, предназначенные для управления регулируемыми насосами, которые содержат гидроусилитель с электромеханическим преобразователем, преобразующим электрический управляющий сигнал в поворот якоря и связанной с ним заслонки [1, стр.21-23]. Для обеспечения соответствия позиции заслонки величине и полярности управляющего сигнала электромеханический преобразователь выполняется с возбуждением или от постоянного магнита, или от источника постоянного тока. Выходные магистрали гидроусилителя подключены к гидроцилиндрам, изменяющим угол наклона люльки регулируемого насоса, от которого зависит частота вращения вала гидромотора.
Обладая высокими динамическими характеристиками, описанные электрогидроприводы тем не менее не обеспечивают достаточно четкий останов вала гидромотора и связанного с ним объекта при резком сбросе управляющего сигнала, при обрыве сети электропитания. Из-за недостаточного быстродействия механизма нуль-установления во время перехода люльки из отклоненного в нулевое положение вал гидромотора и объект еще некоторое время продолжают вращаться.
Наибольшее сходство с изобретением по признакам имеет аксиально-поршневой регулируемый насос [2]. Он содержит механизмы регулирования и нуль-установителя с выполненными заодно исполнительными цилиндрами, подключенными к двухкаскадному гидроусилителю, связанному линией гидропитания с вспомогательным насосом, а также электромеханический преобразователь для управления гидроусилителем, подключенный к цепи электропитания и к цепи обратной связи по положению механизма регулирования. Кроме того, в нем имеется гидравлический автомат разгрузки с электромагнитом, подключенный к гидроусилителю и к исполнительным цилиндрам.
При обрыве сети электропитания электромеханического преобразователя и связанного с ней электромагнита переключения автомата разгрузки происходит перемещение золотника гидрораспределителя, через который исполнительные цилиндры замыкаются друг с другом, и механизм нуль-установителя устанавливает люльку насоса в нейтральное положение.
Недостатком насоса по [2] является медленная установка люльки насоса в нейтральное положение и связанная с ней задержка остановки объекта управления после снятия управляющего сигнала. Это происходит из-за замедленного перемещения люльки к нейтральному положению под воздействием механизма нуль-установителя после срабатывания электромагнита автомата разгрузки. Время установления люльки насоса в нейтральное положение только механизмом нуль-установления на порядок больше, чем время возвращения ее с помощью механизма управления.
Изобретение направлено на повышение быстродействия электрогидропривода по останову объекта регулирования после обрыва сети электропитания. Это достигается тем, что в электрогидравлнческом приводе, содержащем гидродвигатель, гидравлически связанный с регулируемым насосом, к механизму управления которым подключен выход блока управления, связанного с сетью электропитания, причем в качестве механизма управления насоса применен гидроусилитель с электромеханическим преобразователем, содержащим систему возбуждения, выходные магистрали которого подключены к цилиндрам управления люлькой насоса с нуль-установителями, с которыми также гидравлически связан автомат разгрузки с электромагнитом, электромагнит автомата разгрузки подключен к сети электропитания блока управления, а в качестве системы возбуждения в электромеханическом преобразователе установлен постоянный магнит.
Во время работы электрогидравлнческого привода после отключения сети электропитания прекращает действовать обратная связь по положению люльки, якорь электромеханического преобразователя за счет собственных сил постоянного магнита с большой скоростью устанавливается в нейтральную позицию, золотник гидрораспределителя автомага разгрузки в связи с обесточиванием электромагнита пружиной с задержкой, связанной с инерционностью и трением золотника, переключается в положение, при котором полости цилиндров управления люлькой регулируемого насоса сообщаются друг с другом, а механизм нуль-установителя приводит люльку к нейтральному положению. При этом вспомогательный насос продолжает подавать рабочую жидкость, что позволяет механизму управления насоса в процессе приведения к нейтрали гидроусилителя и переключения золотника автомата разгрузки, дополнительно к механизму нуль-установителя принудительно приводить люльку к нейтральному положению. Вал гидромотора останавливается, движение связанного с ним объекта возможно только за счет срабатывания предохранительных клапанов.
Сущность предполагаемого изобретения поясняется чертежом, на котором приведена структурная схема электрогидравлического привода.
Электрогидравлический привод содержит гидродвигатель 1, который рабочими магистралями 2 и 3 связан с регулируемым насосом 4. К магистралям 2 и 3 подключены подпиточные клапаны 5 и 6, своими входами подключенные к вспомогательному насосу (на чертеже не показан), а также предохранительные клапаны 7 и 8. Механизм 9 управления насоса 4 связан с люлькой 10, к которой нуль-установителями 11 и 12 поджаты плунжеры 13 и 14 цилиндров 15 и 16 управления.
К электромеханическому преобразователю 17 механизма 9 управления подключена электрическая цепь 18 от блока 19 управления, который электрической цепью 20 связан с сетью электропитания (на чертеже не показана). Электромеханический преобразователь 17 связан с гидроусилителем 21, который через магистрали 22 и 23 подключен к цилиндрам 15 и 16, а линией 24 питания соединен с автоматом 25 разгрузки. Магистралью 26 автомат 25 разгрузки подключен к вспомогательному насосу. Электромагнит 27 автомата 25 разгрузки подключен к электрической цепи 20.
Механизм управления 9 содержит электромеханический преобразователь 17 с системой возбуждения, выполненной в виде постоянного магнита 28. Якорь с заслонкой электромеханического преобразователя 17 магнитными силами постоянного магнита 28, а также люлька 10 насоса 4 нуль-установителями 11 и 12 удерживаются в нейтральном положении.
При включении электрогидравлического привода (сеть электропитания включена, вспомогательный насос задействован, вал насоса 4 вращается) золотник автомата 25 разгрузки электромагнитом 27 переключается и сообщает магистраль 26 с линией 24, запитывая гидроусилитель 21, и разобщает гидроцилиндры 15 и 16.
При подаче от блока 19 на электромеханический преобразователь 17 электрического управляющего сигнала его заслонка поворачивается и занимает позицию в соответствии с величиной и фазой управляющего сигнала. В выходных магистралях гндроусилителя 21 создается перепад давлений, пропорциональный управляющему сигналу. Люлька 10 плунжерами 13 и 14 цилиндров 15 и 16 поворачивается и занимает угол в соответствии с величиной управляющего сигнала. Вал гидродвигателя 1 вращается с частотой согласно углу люльки 10. При снижении управляющего сигнала люлька 10 движется к нейтральному положению, обороты вала гидродвигателя 1 снижаются.
При внезапном несанкционированном отключении сети электропитания, например при ее обрыве, якорь электромеханического преобразователя 17 с помощью магнитного поля постоянного магнита 28 устанавливается в нейтральное положение, люлька 10 в процессе движения якоря отклоняется к нулевому положению, а после срабатывания золотника автомата 25 разгрузки, которое происходит с задержкой по отношению к срабатыванию электромеханического преобразователя 17, нуль-установителями 11 и 12 устанавливается в нулевое положение, вал гидродвигателя 1 останавливается. Движение объекта, связанного с валом, возможно только при срабатывании предохранительных клапанов 7 и 8.
В ГУП "ВНИИ "Сигнал" был изготовлен образец электрогидравлического привода в соответствии с предложением и проведены его испытания в сравнении с электрогидроприводом, в котором использовался насос согласно [2]. При максимальном начальном управляющем сигнале останов объекта в первом случае происходил на угле 11 град, а во втором случае - на угле 120 град.
Библиография
1. Машиностроительный гидропривод. /Под ред. В. Н. Прокофьева, М., "Машиностроение", 1978 г. , 496 с. Авт: Л.А. Кондаков, Г.А. Никитин, В.Н. Прокофьев и др.
2. Патент РФ 1828945. Бюл. 27, 1993 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСИАЛЬНО-ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ НАСОС | 2001 |
|
RU2206788C2 |
| ОБЪЕМНО-ЗАМКНУТЫЙ ГИДРОПРИВОД | 2006 |
|
RU2318148C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 1991 |
|
RU2018708C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2211376C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2007626C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1973 |
|
SU1840517A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1974 |
|
SU1840519A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
Изобретение относится к гидроавтоматике и может быть использовано в силовых следящих гидроприводах, содержащих дистанционно управляемый регулируемый насос. Техническим результатом является повышение быстродействия по останову объекта управления после обрыва сети электропитания. Технический результат достигается за счет того, что электрогидравлический привод содержит гидродвигатель, гидравлически связанный с насосом, к механизму управления которым подключен выход блока управления, связанного с сетью электропитания, причем в качестве механизма управления насосом применен гидроусилитель с электромеханическим преобразователем, содержащим систему возбуждения, в качестве которой в электромеханическом преобразователе гидроусилителя установлен постоянный магнит. 1 ил.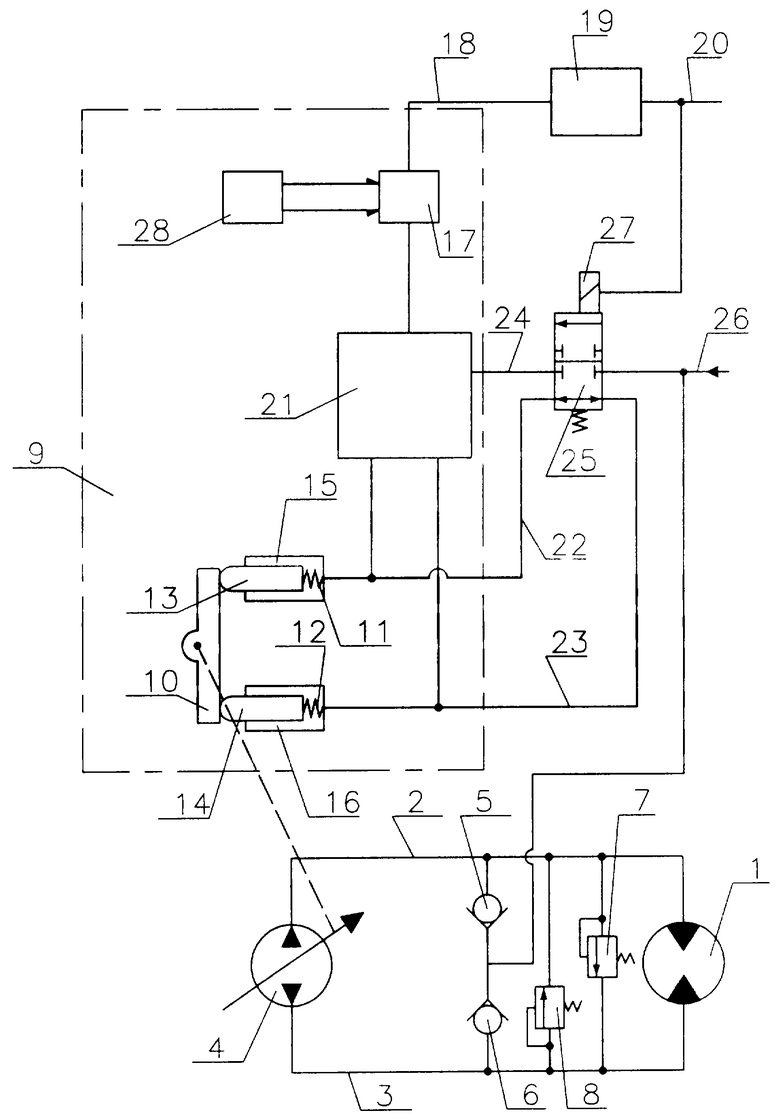
Электрогидравлический привод, содержащий гидродвигатель, гидравлически связанный с регулируемым насосом, к механизму управления которым подключен выход блока управления, связанного с сетью электропитания, причем в качестве механизма управления насосом применен гидроусилитель с электромеханическим преобразователем, содержащим систему возбуждения, выходные магистрали гидроусилителя подключены к цилиндрам управления люлькой насоса, к которой нуль-установителями поджаты плунжеры цилиндров управления, причем цилиндры управления также гидравлически связаны с автоматом разгрузки с электромагнитом, отличающийся тем, что в нем электромагнит автомата разгрузки подключен к сети электропитания блока управления, а в качестве системы возбуждения в электромеханическом преобразователе установлен постоянный магнит.
| Аксиально-поршневой регулируемый насос | 1990 |
|
SU1828945A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2007626C1 |
| АКСИАЛЬНО-ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ НАСОС | 1995 |
|
RU2109167C1 |
| Литьевая форма для полимерныхиздЕлий C МЕХАНичЕСКиМ ОТРыВОМ TO-чЕчНОгО лиТНиКА | 1979 |
|
SU821163A1 |

