Изобретение относится к аэрокосмической технике и может быть использовано при создании сопловых блоков ракетных и реактивных двигателей.
Применение в ракетных двигателях сопла с переменной степенью расширения, которое в транспортном положении занимает минимальные габариты, а после снятия габаритных ограничений (отделение космического аппарата от ракеты-носителя, разделение ступеней, сход с транспортно-пусковых установок и т.п.) превращается в полноразмерное сопло, позволяет решить две задачи:
- уменьшить габариты двигательной установки или (при неизменных габаритах) разместить дополнительное топливо;
- увеличить в условиях космического пространства тягу двигателя за счет использования сопла с диаметром выходного сечения, выходящим за мидель двигателя.
Один из самых эффективных способов решения этих задач реализуют сопла с лепестковыми насадками [Фахрутдинов И. Х., Котельников А.В. Конструкция и проектирование РДТТ: Учебник для машиностроительных вузов. - М.: Машиностроение, 1987. - 328 с.: ил. (см.стр. 145-146)]. Однако большинство известных схем лепестковых насадков требует сложных устройств синхронного раскрытия с одновременным разворотом лепестков (см., например, там же рис.6.20). Топология складки лепестков в известных схемах, проектируемая в угоду стремлению упростить устройства раздвижки, далека от совершенства и слабо реализует потенциальные возможности уменьшения габаритов лепесткового насадка (если лепестки сложить стопкой, они будут занимать габариты и объем в десятки раз меньше, чем сложенный телескопический раздвижной секционный насадок (там же, стр.142, рис.6.14).
Наиболее близким по технической сущности и достигаемому положительному эффекту к предлагаемому изобретению является решение по заявке Японии N 58-51149 от 15.11.83 (МКИ F 02 K 9/97) "Телескопическое сопло", по которому к стационарной части сопла шарнирно присоединены продольные пластины (лепестки), образующие газовый тракт закритической части сопла. На срезе сопла лепестки шарнирами скреплены со шпангоутом. Уменьшение осевых габаритов сопла происходит за счет деформации лепестков при осевом смещении с поворотом вокруг своей оси шпангоута.
Недостатком этой схемы является деформативность лепестков. Требования деформативности в комплексе с требованиями по эрозионной и тепловой стойкости являются труднореализуемыми, приводящими к снижению надежности и усложнению конструкции.
Технической задачей настоящего изобретения является упрощение конструкции сопла и повышение его надежности при максимальном сокращении габаритов в осевом и радиальном направлениях.
Сущность изобретения заключается в том, что в известном сопле с переменной степенью расширения, содержащем стационарную часть и складывающийся насадок, образованный набором продольных лепестков, шарнирно соединенных со стационарной частью, и шпангоутом, шпангоут соединен с лепестками при помощи звеньев, расположенных в радиальных плоскостях. Шарниры в стыке лепестков со стационарной частью и звеньями выполнены сферическими или карданными, а в стыке звеньев со шпангоутом - цилиндрическими с расположением оси вращения перпендикулярно соответствующим радиальным плоскостям сопла.
Технический результат достигается за счет того, что предлагаемая топология расположения лепестков позволяет
1) выполнять лепестки в виде жестких пластин, т.е. из материалов, обладающих необходимой эрозионной и тепловой стойкостью, а также выполнять все остальные узлы и детали сопла жесткими из традиционных для подобных конструкций материалов;
2) уменьшить осевые габариты сложенного сопла при упрощении кинематики его раздвижки и соответствующем упрощении устройств раздвижки;
3) уменьшить радиальные габариты сложенного сопла за счет введения между лепестком и шпангоутом звеньев при сохранении простоты и надежности раздвижки по п.(2).
Уменьшение осевых габаритов сложенного сопла по п.(2) для простоты рассуждении первоначально будем рассматривать при условии жесткого закрепления звеньев в шпангоуте (т.е. звенья являются частью шпангоута). При этом сферические шарниры позволяют насадку, имеющему коническую (или близкую к конической) форму (см. фиг.1), при провороте шпангоута относительно стационарной части вокруг продольной оси на угол ϕ превращаться в однополостной гиперболоид вращения с переменной длиной l, являющейся функцией от угла разворота ϕ: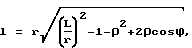
где L - длина лепестков;
r - радиус среза стационарной части сопла;
ρ = R/r - относительный радиуса
R - радиус шпангоута (см., например, патент РФ N2109158).
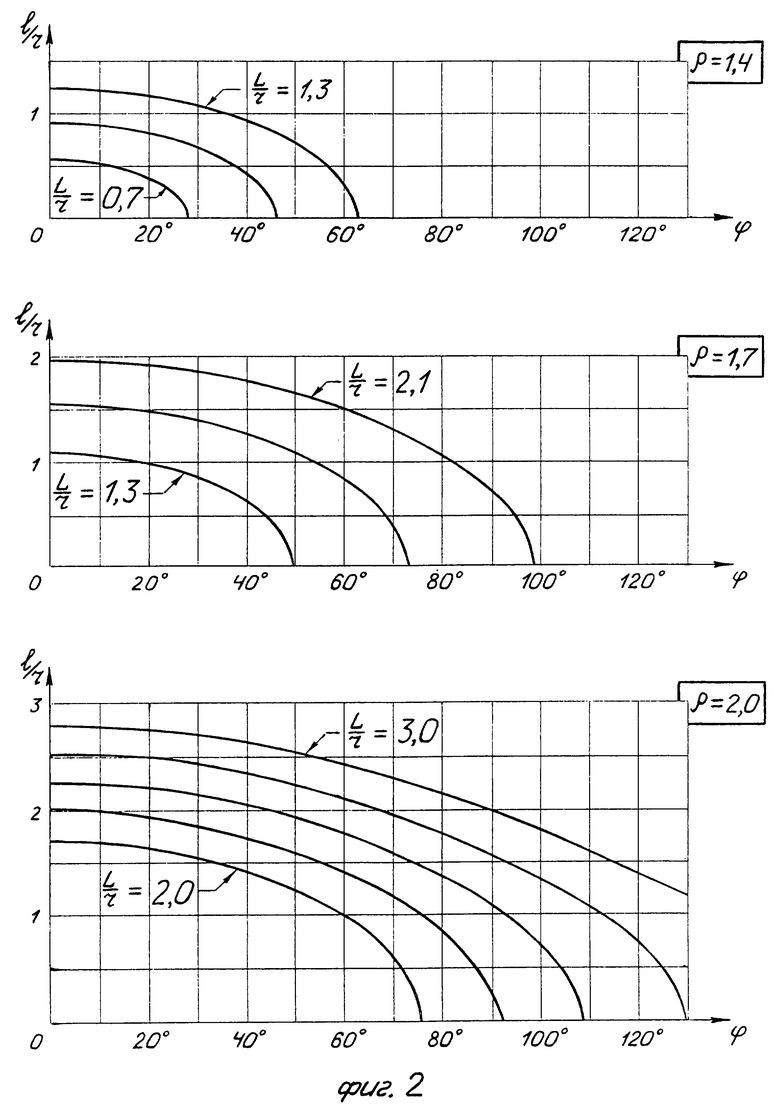
График зависимости l=f(ϕ) представлен на фиг.2.
Как видно из графика, теоретически длина насадка, приобретающего при закрутке форму гиперболоида, может сокращаться до нуля. Минимальная практическая длина такого гиперболоида определяется моментом соприкосновения соседних лепестков (с учетом стрелы прогиба их сечения, определяемой шириной, и их толщины) и составляет 10-20% от длины насадка в рабочем положении.
Отметим, что при истечении газа через раструб создается внутреннее, переменное по длине соплового насадка, давление. При этом, по оценкам, проведенным авторами, момент сил MR, стремящихся развернуть гиперболоид в конус, относится к противодействующему ему моменту сил MQ, стремящихся сложить раструб, в раздвинутом положении сопла как
где α - угол полураствора конического раструба, т.е. условием устойчивости раструба при его работе является α<45o.
Важным достоинством схемы является пространственная жесткость конструкции как в крайних, так и в любом промежуточном положении. Покажем, что система, представленная на фиг.1, имеет только одну степень свободы - возможность движения точек шпангоута по винтовой линии. Подвижность механизма (число степеней свободы) определяется по структурной формуле А.П. Малышева [Л. Н. Решетов. "Конструирование рациональных механизмов". - М.: Машиностроение, 1987]
W=6n-(Σp-q)-r,
где W - число степеней свободы механизма;
n - число подвижных звеньев;
Σp - число связей;
q - число избыточных связей, устранение которых не влияет на подвижность механизма;
r - число лишних степеней свободы, не влияющих на общую подвижность механизма.
Кроме того, взаимовлияние связей друг на друга может накладывать дополнительные связи, не выявленные при формальном структурном анализе механизма, т. к. "Подвижность механизма практически устанавливается при внешнем осмотре, исходя из общих рассуждении (получается проще и надежнее, чем по структурной формуле Малышева)" [там же, cтр.9]. Выявленные при общих рассуждениях нереализуемые (вследствие взаимовлияния связей) степени свободы следует вычитать из общего числа степеней свободы, формально определенных по формуле Малышева.
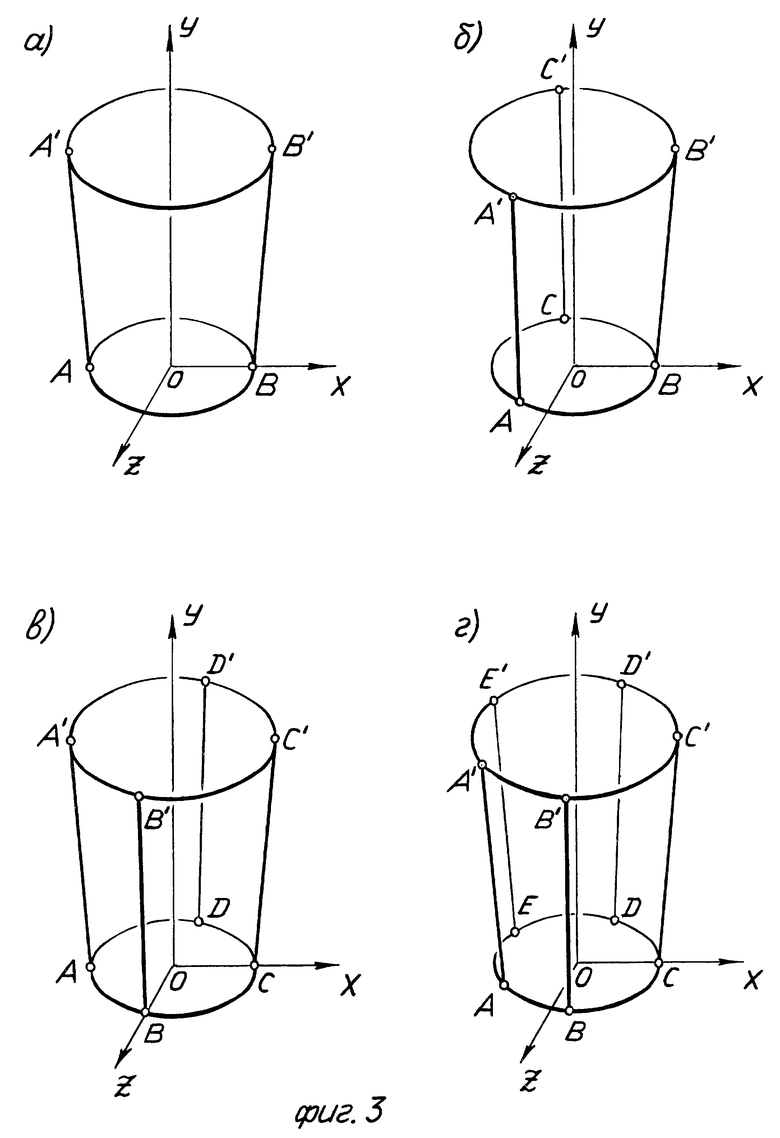
Представим гиперболоид (фиг.1) в виде двух колец (подвижного и неподвижного), шарнирно связанных стержнями, количество которых "m" (см. фиг.3). Определим по формуле А.П. Малышева число степеней свободы гиперболоида, состоящего из двух стержней (фиг.3а)
m=2 число звеньев n=3;
число связей Σp=4•3 (4 сферических, т.е. трехстепенных шарнира);
число избыточных связей q=0;
число лишних степеней свободы r=2 (вращение стержней вокруг своих осей);
число степеней свободы механизма W=6•3-(4•3-0)-2=4
(в плоскостях XOУ, ZОУ, вокруг оси ОУ, вокруг оси A'B').
Определим число степеней свободы гиперболоида, состоящего из трех стержней (фиг.3б):
m=3 число звеньев n=4;
число связей ΣP=6•3 (6 сферических шарниров);
число избыточных связей q=0;
число лишних степеней свободы r=3 (вращение стержней вокруг своих осей);
число степеней свободы механизма W=6•4-(6•3-0)-3=3
(вокруг оси ОУ, в двух разных произвольно выбранных плоскостях, например в плоскости ⊥AB и в плоскости ⊥BC).
Определим число степеней свободы гиперболоида, состоящего из четырех стержней (фиг.3в):
m=4 число звеньев n=5;
число связей ΣP=8•3 (8 сферических шарниров);
число избыточных связей q=1 (четвертый стержень не влияет на подвижность механизма);
число лишних степеней свободы r=4 (вращение стержней вокруг своих осей);
число степеней свободы механизма W=6•5-(8•3-1)-4=3
(вокруг оси ОУ, в двух разных произвольно выбранных плоскостях, например, в плоскости ⊥AB и в плоскости ⊥BC).
Определим число степеней свободы гиперболоида, состоящего из пяти стержней (фиг.3г):
m=5 число звеньев n=6;
число связей ΣP=10•3 (10 сферических шарниров);
число избыточных связей
число лишних степеней свободы r=5 (вращение стержней вокруг своих осей);
число степеней свободы механизма
Дальнейшее увеличение количества стержней каждый раз прибавляет 6 степеней свободы и 6 ограничений (связей), одну избыточную связь и одну лишнюю степень свободы, т.е. не меняет подвижность.
Из приведенных рассуждении следует, что пространственной жесткостью (одной степенью свободы) при зафиксированных относительно шпангоута звеньях (т. е. при неизменном миделе сопла) обладает сопловой насадок, имеющий не менее 5 лепестков и R≠r.
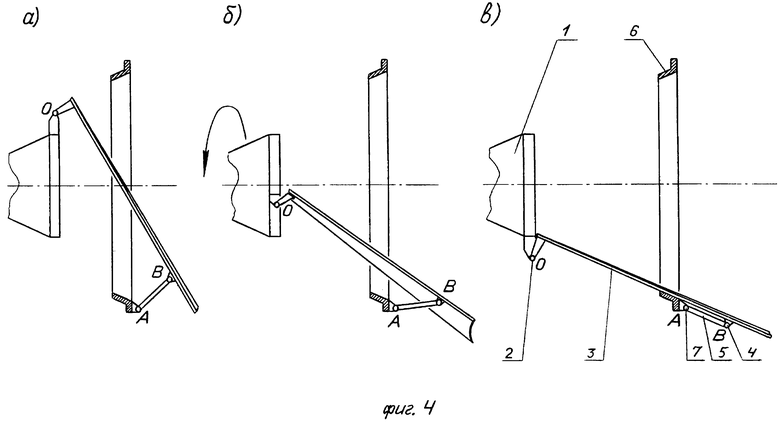
Рассмотрим уменьшение радиальных габаритов сложенного сопла при расфиксированных относительно шпангоута звеньях. Уменьшение радиальных габаритов достигается за счет того, что радиус геометрического места точки В (сферического шарнира) в рабочем (раздвинутом) положении сопла (см. фиг.4в) больше радиуса геометрического места точки В в транспортном положении сопла (см. фиг. 4а). На фиг.4 изображена связь стационарной части сопла со шпангоутом посредством одного лепестка и одного звена. Остальные лепестки и звенья условно не показаны, но при рассуждениях будем учитывать их действие на пространственное положение механизма. С целью наглядности процесса раздвижки на фиг.4 шпангоут считается неподвижным, а раздвижка сопла происходит за счет того, что стационарная часть сопла (и весь двигатель) вращается вокруг неподвижного шпангоута. Угол закрутки ϕ стационарной части сопла относительно шпангоута по сравнению с первоначальным положением (фиг.4в) для простоты и наглядности рассуждении на фиг.4а равен 180o (лепесток находится в плоскости чертежа). В реальной конструкции угол закрутки ϕ не может быть больше 165o-176o из-за влияния соседних лепестков.
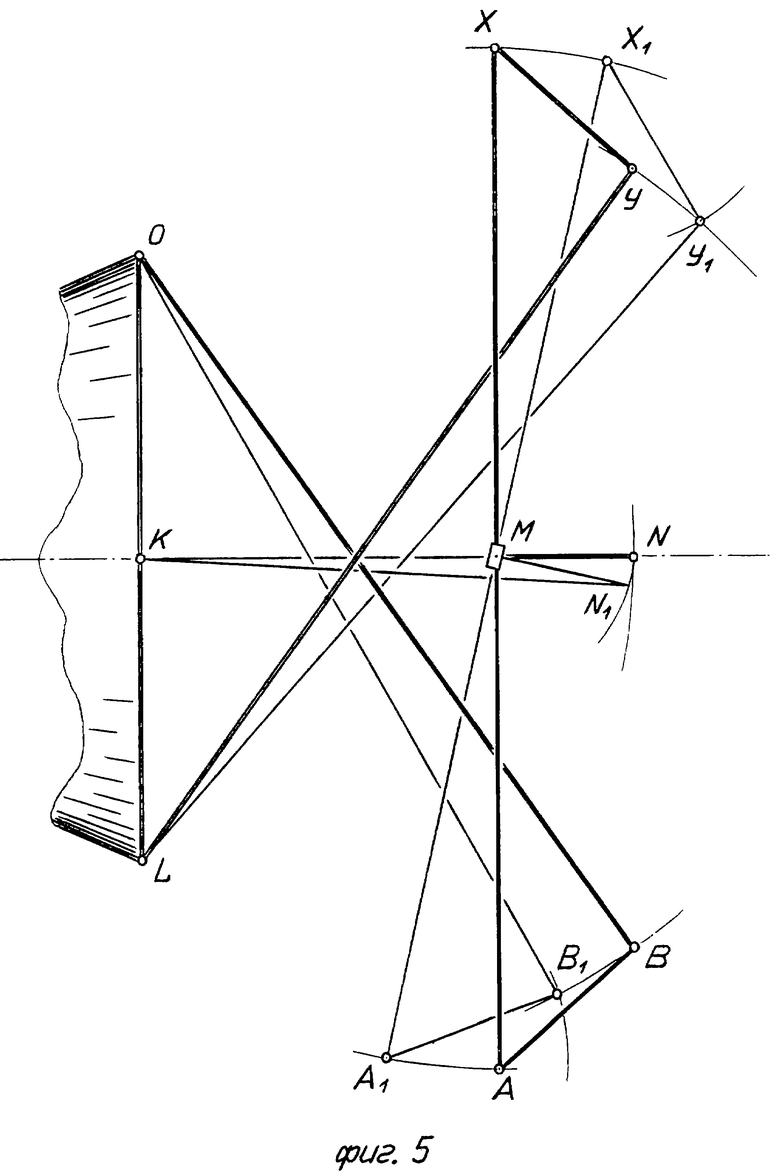
Вопрос раздвижки механизма, представленного на фиг.4, связан с вопросом определения числа его степеней свободы. На фиг.5 показан перпендикулярный плоскости чертежа шпангоут АХ, соединенный посредством звеньев АВ, ХУ и лепестков ОВ, УL со стационарной частью сопла ОL. Т.к. угол разворота ϕ равен 180o, все указанные отрезки лежат в плоскости чертежа. Очевидно, что в общем случае, когда радиус точки В не равен радиусу точки А, шпангоут АХ не может совершать плоскопараллельного движения при неизменном расстоянии до стационарной части ОL (|MK|=const).
Двухлепестковый механизм при неизменном расстоянии до стационарной части OL (|MK|= const) допускает поворот шпангоута АХ вокруг точки М. При этом механизм занимает положение LХ1У1А1В1О (см. фиг.5). Покажем, что четырехлепестковый механизм такого поворота не допускает. Допустим, что в результате поворота шпангоут занял положение А1Х1. Зафиксированное на шпангоуте посредством цилиндрического шарнира звено МN при таком повороте занимает положение MN1, а лепесток КN занимает положение KN1. Заметим, что длина отрезка |KN1| меньше длины отрезка |KN|. Компенсировать уменьшение длины отрезка КN1 может увеличение длины проекции звена МN (т.е. увеличение длины |MN1|). Это может произойти при повороте звена MN в цилиндрическом шарнире М. Звено MN может поворачиваться только в плоскости, перпендикулярной плоскости чертежа (след этой плоскости - линия МN1). С другой стороны, звено МN может поворачиваться только в плоскости треугольника KMN1. Но плоскость треугольника КМN1 совпадает о плоскостью, следом которой является линия MN1, только в том случае, если точки N1 и N совпадают. Это доказывает невозможность поворота шпангоута АХ четырех- (и более) лепесткового механизма.
Таким образом, данный механизм характеризуется невозможностью при |MK|= const плоскопараллельного отклонения от оси вращения в двух взаимно перпендикулярных направлениях и невозможностью перекоса шпангоута в этих же направлениях, т. е. имеет 4 нереализуемые (вследствие взаимовлияния связей) степени свободы.
Определим по формуле А.П. Малышева число степеней свободы рассматриваемого механизма с числом лепестков "m":
m=4 число звеньев n=9;
число связей ΣP=8•3+4•5 (8 сферических, т.е. трехстепенных шарнира и 4 цилиндрических, т.е. одностепенных шарнира);
число избыточных связей q=0;
число лишних степеней свободы r=4 (вращение 4-х лепестков вокруг своих осей); формально число степеней свободы механизма W=9•6-(8•3+4•5-0)-4=6, а с учетом 4-х нереализуемых степеней свободы W=2 (вращение шпангоута (т.е. движение его точек по винтовой линии) и осевое плоскопараллельное перемещение шпангоута без его вращения).
Увеличение количества лепестков каждый раз прибавляет 12 степеней свободы, 11 ограничений (связей) и одну лишнюю степень свободы, т.е. не меняет подвижность (число степеней свободы) механизма. Избыточные связи отсутствуют, т.к. устранение одного из лепестков увеличивало бы число степеней свободы механизма на число степеней свободы того звена, к которому был присоединен лепесток.
Заметим, что при формальной неопределенности траектории движения точек механизма при раздвижке, связанной с наличием двух его степеней свободы, есть основания признать кинематическую простоту раздвижки, т.к. она не требует дополнительных направляющих устройств или пантографов. В самом деле, одна из степеней свободы (осевое плоскопараллельное перемещение шпангоута) направлена вдоль другой (движение шпангоута по винтовой линии). Поэтому шпангоут двигается только вдоль оси вращения сопла, без перекосов. При этом все лепестки поворачиваются синхронно на один и тот же угол. Неопределимость системы заключается в том, что промежуточное положение шпангоута неодназначно определяет этот угол (в статике при данном промежуточном положении шпангоута лепестки могут отклоняться в обе стороны (но обязательно синхронно) вокруг некоторого угла). Это не влияет на работоспособность и надежность механизма, тем более, что его крайние положения (независимо от промежуточной траектории) являются однозначными (начальное - по условию закрепления стопорно-фиксирующими устройствами, конечное - с упором лепестков в шпангоуте обусловлено центробежными силами, возникающими при раздвижке, стремящимися прижать лепестки к шпангоуту, и газодинамическим прижатием при запуске двигателя). При желании можно свести к минимуму неопределенность траектории раздвижки, например, посредством подпружинивания шарниров (хотя бы части из них).
Указанное техническое решение неизвестно из патентной и технической литературы.
Изобретение поясняется следующим графическим материалом:
На фиг.1 представлена схема лепесткового насадка, у которого лепестки со шпангоутом соединены только посредством цилиндрических шарниров (звенья условно отсутствуют, точнее, они жестко закреплены в шпангоуте).
На фиг.2 представлены графики зависимости длины l=f(ϕ) лепесткового насадка, изображенного на фиг.1, от угла разворота шпангоута ϕ;
На фиг. 3а, б,в,г представлены соответственно 2-, 3-, 4- и 5-стержневая модели механизма лепесткового насадка по фиг.1.
На фиг. 4а, б, в, представлены соответственно начальное (транспортное), промежуточное и конечное (рабочее) положение одного из лепестков соплового насадка при условии обратимого движения раздвижки (стационарная часть сопла вращается вокруг шпангоута);
На фиг.5 представлено геометрическое доказательство прямолинейного движения шпангоута.
Сопло с переменной степенью расширения содержит стационарную часть 1 (см. фиг. 4), с которой посредством сферических шарниров 2 (или карданов) соединены лепестки 3, соединенные на некотором расстоянии от среза сопла посредством сферических шарниров 4 (или карданов) со звеньями 5. Звенья 5 соединены со шпангоутом 6 посредством цилиндрических шарниров 7. Шпангоут 6 относительно стационарной части 1 сопла в транспортном положении (фиг.4а) соединен посредством какого-либо из известных стопорно-фиксирующих устройств (не показано). Приводом сопла могут являться микро-РДТТ, размещенные по касательной на шпангоуте 6 (не показаны).
Устройство работает следующим образом. По команде от системы управления происходит расфиксация стопорно-фиксирующих устройств и срабатывание микро-РДТТ, установленных на шпангоуте 6 (или срабатывание какого-либо другого из известных приводов раздвижки). В результате возникшего момента сил начинается раскрутка шпангоута 6 вокруг оси вращения с соответствующим разворачиванием гиперболоида в конус. Вращение шпангоута 6 приводит к тому, что на лепестки 3 и звенья 5 действуют центробежные силы. Действие центробежных сил, реакций в связях и подпружинивания шарниров (если такое имеется) приводит к стремлению лепестков 3 приблизиться к шпангоуту 6 вплоть до упора в него в крайнем (рабочем) положении насадка. Запуск двигателя после раздвижки насадка приводит к появлению газодинамических сил, фиксирующих насадок в рабочем положении.
Технико-экономическая эффективность предлагаемого изобретения по сравнению с прототипом, в качестве которого выбрано "телескопическое сопло" по заявке Японии N 58-51148 от 15.11.83 заключается в упрощении конструкции сопла и повышении его надежности при максимальном сокращении габаритов в осевом и радиальном направлениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2109158C1 |
| Сопло ракетного двигателя | 2016 |
|
RU2620480C1 |
| СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ С МЕХАНИЗМОМ РАЗДВИЖКИ | 2015 |
|
RU2602462C1 |
| СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ И МЕХАНИЗМ РАЗДВИЖКИ СОПЛА РАКЕТНОГО ДВИГАТЕЛЯ | 2013 |
|
RU2542650C2 |
| СПОСОБ ИСПЫТАНИЙ РАЗДВИЖНОГО СОПЛА РАКЕТНОГО ДВИГАТЕЛЯ В БАРОКАМЕРЕ С ГАЗОДИНАМИЧЕСКОЙ ТРУБОЙ И СТЕНДОВОЕ РАЗДВИЖНОЕ СОПЛО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2482322C1 |
| Сопло ракетного двигателя с механизмом раздвижки | 2015 |
|
RU2614436C1 |
| РАКЕТНЫЙ ДВИГАТЕЛЬ ТВЕРДОГО ТОПЛИВА | 1996 |
|
RU2109160C1 |
| РАЗДВИЖНОЕ СОПЛО РАКЕТНОГО ДВИГАТЕЛЯ | 2000 |
|
RU2175725C1 |
| РАКЕТНЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2432485C2 |
| РАЗДВИЖНОЕ СОПЛО ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2237189C2 |
Сопло с переменной степенью расширения, используемое при создании сопловых блоков ракетных и реактивных двигателей, содержит стационарную часть и складывающийся насадок, образованный набором продольных лепестков, шарнирно соединенных со стационарной частью, и шпангоутом. Шпангоут соединен с лепестками при помощи звеньев, расположенных в радиальных плоскостях. Шарниры в стыке лепестков со стационарной частью и звеньями выполнены сферическими или карданными, а в стыке звеньев со шпангоутом - цилиндрическими с расположением оси вращения перпендикулярно соответствующим радиальным плоскостям сопла. Изобретение позволяет упростить конструкцию сопла и повысить его надежность при максимальном сокращении габаритов в осевом и радиальном направлениях. 5 ил.
Сопло с переменной степенью расширения, содержащее стационарную часть и складывающийся насадок, образованный набором продольных лепестков, шарнирно соединенных со стационарной частью, и шпангоутом, отличающееся тем, что шпангоут соединен с лепестками при помощи звеньев, расположенных в радиальных плоскостях, при этом шарниры в стыке лепестков со стационарной частью и звеньями выполнены сферическими или карданными, а в стыке звеньев со шпангоутом - цилиндрическими с расположением оси вращения перпендикулярно соответствующим радиальным плоскостям сопла.
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| ФАХРУТДИНОВ И.Х | |||
| и др | |||
| Конструкция и проектирование ракетных двигателей твердого топлива | |||
| - М.: Машиностроение, 1987, с.142, рис.6.14 | |||
| ФАХРУТДИНОВ И.Х | |||
| и др | |||
| Конструкция и проектирование ракетных двигателей твердого топлива | |||
| - М.: Машиностроение, 1987, с.145, рис.6.20 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| ОБОЛОЧКА НАРУЖНАЯ ВЛАГОЗАЩИТНАЯ ДЛЯ ДЛИННОМЕРНЫХ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО КАБЕЛЕЙ И ТРУБ (ВАРИАНТЫ) | 2010 |
|
RU2457390C2 |
| Фальцевое соединение спирально-навивных оболочек силосов | 2001 |
|
RU2217558C2 |
| US 4638947 А, 27.01.1987 | |||
| US 4754926 А, 05.06.1988 | |||
| СПОСОБ ОДНОПУНКТНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА КОРОТКОВОЛНОВОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2523650C2 |
| СПОСОБ ВЫСОТНОГО РЕГУЛИРОВАНИЯ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 1993 |
|
RU2076938C1 |
| РЕГУЛИРУЕМОЕ СОПЛО АВИАЦИОННОГО ДВИГАТЕЛЯ С ОТКЛОНЯЕМЫМ ВЕКТОРОМ ТЯГИ | 1997 |
|
RU2142571C1 |

