Изобретение относится к радиопеленгации и может быть использовано в комплексах радиоконтроля для определения местоположения источников излучения коротковолнового диапазона с ионосферным распространением радиоволн.
Известен триангуляционный способ определения местоположения источника излучения (Кондратьев B.C., Котов А.Ф., Марков Л.Н. Под ред. проф. В.В. Цветнова. Многопозиционные радиотехнические системы. - М.; Радио и связь, 1986 г., с.241-242), включающий одновременный прием радиосигналов и измерение пеленгов не менее чем в двух пространственно разнесенных пунктах пеленгования, передачу пеленгов на центральный пункт и вычисление по ним координат источника.
Для достижения требуемой точности определения координат данным способом взаимное удаление пунктов пеленгования должно быть порядка расстояния до источника и достигает тысяч километров. Отсюда и основной недостаток способа - сложность и значительные экономические затраты на обеспечение связи с удаленным центральным пунктом. Другим недостатком является необходимость выполнения условия одновременности приема и пеленгования сигналов в пунктах пеленгования, что не всегда возможно из-за различий в условиях распространения радиоволн.
Из известных способов наиболее близким к предлагаемому по технической сущности является способ однопунктного определения местоположения источника коротковолнового излучения (Мезин В.К. Автоматические пеленгаторы. М., «Сов. радио», 1969 г., с.127-132), включающий определение параметров ионосферных слоев: высоты и критических частот, и, с учетом длины волны излучения, эффективно отражающего ионосферного слоя, прием радиосигналов с помощью пространственно разнесенных пеленгаторных антенн и приемников, измерение пеленга и угла места прихода радиоволн, и определение дальности до источника излучения по измеренному углу места с учетом высоты эффективно отражающего ионосферного слоя.
Недостатки данного способа состоят в ограничении области его применения: способ не применим для трасс распространения радиоволн с числом отражений (скачков) более одного, а также при многолучевом распространении радиоволн, когда количество эффективных отражающих слоев ионосферы превышает единицу. Практически диапазон измеряемых дальностей при этом лежит в пределах от 500 до 1000 км.
Ограничение, связанное с многолучевым распространением радиоволн, принципиально может быть снято при определении пеленга способами многосигнального двухмерного пеленгования (например, патент РФ №2289146, 2006, G01S 3/00, 5/04). Однако такое решение наталкивается на две проблемы. Первая из них состоит в необходимости определения углового спектра в многомерном пространстве и потребного для этого значительного числа операций обработки сигналов. Так, при одновременном пеленговании двух сигналов угловой спектр становится уже трехмерным, по пеленгу и углу места каждого из сигналов. Число точек его представления с дискретностью один градус составляет порядка трех миллионов и возрастает примерно на два порядка при каждом последующем увеличении числа лучей (пеленгуемых сигналов). Вторая проблема заключается в отсутствии (по крайней мере, не установлено в известных источниках) порядка последующей обработки измеренных углов места с привязкой их к ионосферным слоям и дальности. При этом раздельное независимое измерение совокупности углов прихода радиоволн при неизвестном их числе, сопровождается погрешностям определения, как числа сигналов, так и самих углов, и, в конечном счете, приводит к практически не приемлемым погрешностям определения координат.
Технической задачей данного изобретения является расширение области применения известного способа на варианты распространения радиоволн с произвольным числом скачков и количеством лучей.
Поставленная техническая задача решается за счет того, что в известном способе однопунктного определения местоположения источника коротковолнового излучения, включающем определение высоты ионосферных слоев и критических частот, прием радиосигналов с помощью пространственно разнесенных пеленгаторных антенн и приемников, определение пеленга и дальности до источника излучения, новым является то, что предварительно для точек возможного положения источника по дальности рассчитывают число и углы места прихода лучей, удовлетворяющих условиям отражения от ионосферных слоев с учетом их высоты, критических частот и длины волны излучения, затем для каждого из лучей, их расчетных углов места, возможных значений пеленга рассчитывают набеги фаз сигналов в антеннах, после чего в принятых радиосигналах компенсируют радиосигналы источника с учетом расчетных набегов фаз, скомпенсированные сигналы квадратично детектируют и усредняют по совокупности антенн, а пеленг и дальность до источника излучения определяют по минимуму результатов усреднения, взвешенных пропорционально числу лучей.
Решение поставленной технической задачи выполнено путем перехода от двухэтапной процедуры: измерения параметров, определяющих местоположение источника излучения (пеленга и угла места, прототип), с последующим расчетом координат, к одноэтапной обработке принимаемых радиосигналов на основе определения и учета априорной информации о числе скачков, количестве пеленгуемых сигналов и углах места их прихода. Априорную информацию определяют путем учета параметров ионосферы и условий отражения радиоволн из мест возможного положения источника, а последующую обработку выполняют уже при априорно известном числе и пространственных параметрах принятых радиосигналов. Это переводит проблему измерения параметров неизвестного числа сигналов (прототип) в задачу определения наиболее правдоподобного местоположения источника из мест, удовлетворяющих условиям отражения от ионосферных слоев. При этом рассчитывают набеги фаз сигналов в антеннах для каждого из лучей, значений пеленга и дальности, после чего в принятых радиосигналах компенсируют радиосигналы источника с учетом расчетных набегов фаз, выполняют детектирование и усреднение результатов детектирования по совокупности антенн. Совокупность результатов усреднения представляет собой функцию пространственной неопределенности источника излучения в координатах «пеленг-дальность», имеющей, вследствие компенсации, минимум, в точке истинного положения источника. Особенность этой функции состоит в различии уровня минимума для различного числа пеленгуемых сигналов. Для устранения этого противоречия результаты усреднения взвешивают пропорционально числу лучей и только затем определяют пеленг и дальность до источника излучения по минимуму результатов усреднения, взвешенных пропорционально числу лучей.
Таким образом, учет априорной информации о числе скачков, лучей и углах места их прихода, переход к одноэтапной обработке в соответствии с предложенными новыми действиями над сигналами, условиями и порядком их выполнения, позволяет решить поставленную техническую задачу: расширить область применения известного способа на варианты распространения радиоволн с произвольным числом скачков и количеством лучей.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые фигуры.
На фиг.1 представлена структурная схема комплекса радиоконтроля для реализации заявленного способа;
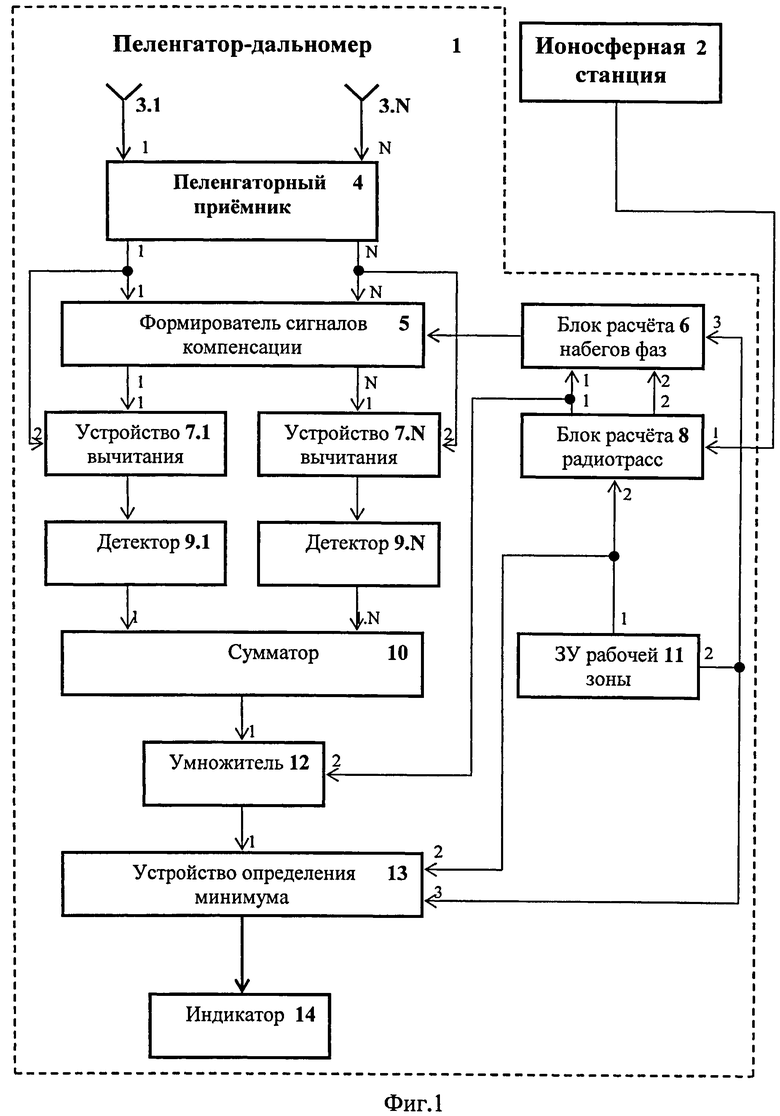
на фиг.2 представлены расчетные трассы распространения радиоволн;
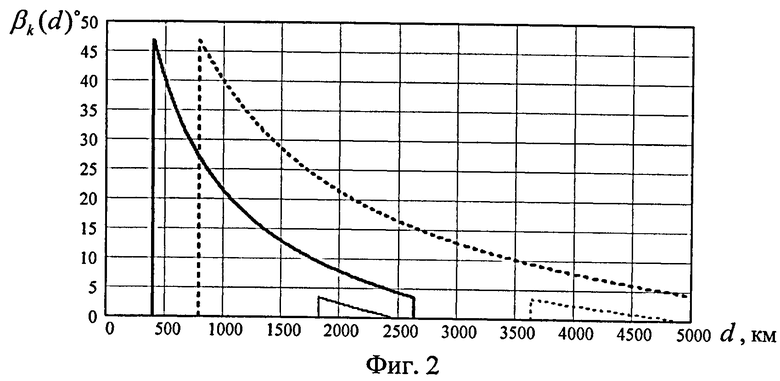
на фиг.3 показаны сечения функции пространственной неопределенности по пеленгу;
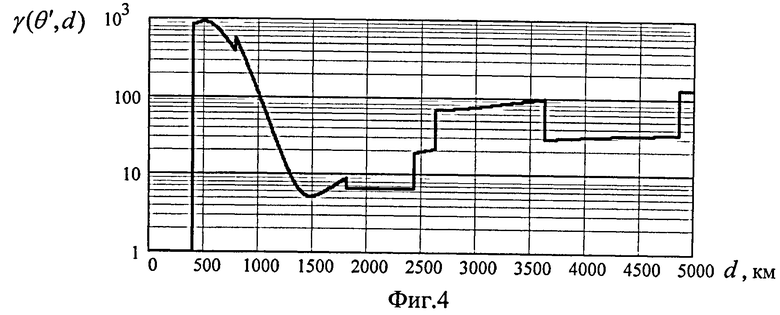
на фиг.4 показаны сечения функции пространственной неопределенности по дальности;
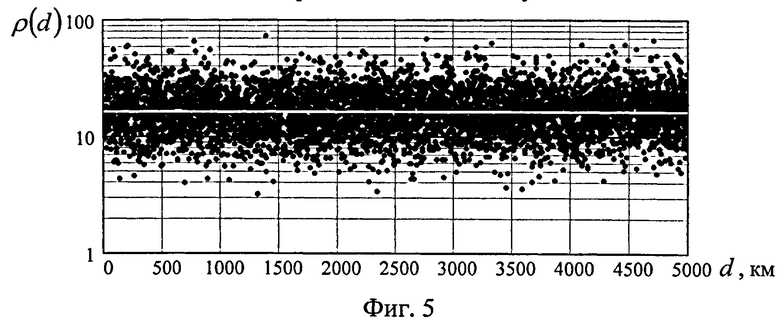
фиг.5 - зависимость отношения сигнал/шум от дальности до источника;
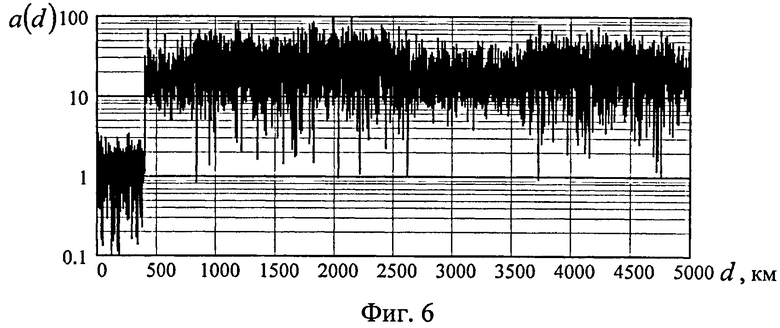
фиг.6 - зависимость уровня сигнала в антенне от дальности до источника;
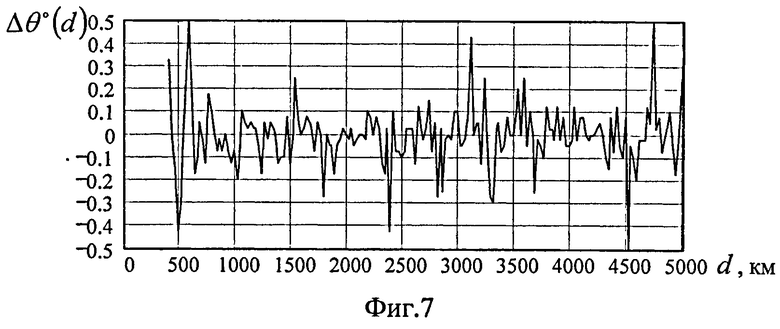
фиг.7 - зависимость погрешности пеленгования от дальности до источника;
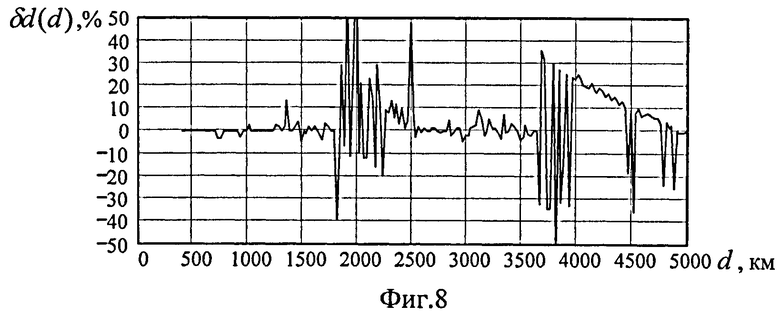
фиг.8 - зависимость относительной погрешности определения дальности от дальности до источника.
Комплекс радиоконтроля (фиг.1), реализующий предложенный способ, содержит пеленгатор-дальномер 1 и ионосферную станцию 2. В состав пеленгатора-дальномера 2 входят пеленгаторные антенны 3.1-3.N, пеленгаторный приемник 4, входами 1-N подключенный к выходам антенн 3.1-3.N, формирователь сигналов компенсации 5, блок расчета набегов фаз 6, устройства вычитания 7.1-7.N, блок расчета радиотрасс 8, детекторы 9.1-9.N, сумматор 10, запоминающее устройство (ЗУ) рабочей зоны 11, умножитель 12, устройство определения минимума 13 и индикатор 14.
Выходы 1-N пеленгаторного приемника 4 подключены к одноименным входам формирователя сигналов компенсации 5, 0 вход которого соединен с выходом блока расчета набегов фаз 6. Выходы 1-N формирователя сигналов компенсации 5 подключены к первым входам соответственно устройств вычитания 7.1-7.N, вторые входы которых соединены соответственно с выходами 1-N пеленгаторного приемника 4. Выходы устройств 7.1-7.N вычитания подключены через детекторы 9.1-9.N соответственно к входам 1-N сумматора 10, выход которого через первый вход умножителя 12 подключен к входу 1 устройства 13 определения минимума, ко второму входу которого и второму входу блока расчета радиотрасс 8 подключен выход один ЗУ рабочей зоны 11, второй выход которого соединен с третьим входом устройства определения минимума 13 и одноименным входом блока 6 расчета набегов фаз, первый и второй вход которого соединены с одноименными выходами блока расчета радиотрасс 8, к первому входу которого подключен выход ионосферной станции 2, а выход устройства определения минимума 13 подключен к индикатору 14.
Ионосферная станция 2 обеспечивает вертикальное зондирование ионосферы с измерением высоты и критической частоты каждого из слоев ионосферы (Грудинская Г.П. Распространение радиоволн. М. «Высш. школа», 1975, с.174-181). Как альтернатива могут быть использованы метод возвратно-наклонного зондирования, данные наблюдений мировой сети ионосферных станций или «Месячные прогнозы распространения радиоволн» (см. указанный источник).
Пеленгаторные антенны 3.1-3.N пеленгатора-дальномера 1 идентичные, типа вертикальный вибратор, ненаправленные в горизонтальной плоскости. Образуют кольцевую эквидистантную антенную решетку радиусом r. Антенна 3.1 с номером n=1 ориентирована на Север, нумерация других антенн - по часовой стрелке от первой в порядке возрастания номеров: n=1, 2, …, N. Число антенн N на единицу больше максимального числа одновременно принимаемых лучей, практически должно быть N≥5.
Другие составные части 4-14 пеленгатора-дальномера 1 представляют собой типичные элементы систем аналого-цифровой обработки и вычислительных систем комплексов радиоконтроля. Пеленгаторный приемник 4 многоканальный, с числом каналов равным числу антенн, цифрового типа. Обеспечивает синхронный прием радиосигналов с их представлением в комплексном виде совокупностью квадратурных составляющих. Может быть выполнен с применением цифровой элементной базы, например, по варианту, приведенному в (Побережский Е.С. Цифровые радиоприемные устройства. - М.: Радио и связь, 1987, с.11-13).
В запоминающее устройство (ЗУ) рабочей зоны 11 заносят координаты точек возможного положения источника в системе координат (θ, d) «пеленг-дальность». Отсчет пеленга выполняют от направления на Север по часовой стрелке, дальность от комплекса радиоконотроля до источника указывают по поверхности Земли. Координаты квантуют исходя из требуемой точности определения местоположения источника. С выхода 1 запоминающего устройства 11 считывают значение дальности d, а с выхода 2 значение пеленга θ.
До начала непосредственно приема радиосигналов в блоке расчета радиотрасс 8 по данным ионосферного зондирования, поступающим на его первый вход от ионосферной станции 2 (в виде числа отражающих ионосферных слоев J и, для каждого из слоев, высоты Hj и критической частоты слоя Fj, где j=1, …, J - номер ионосферного отражающего слоя), для точек возможного положения источника по дальности, поступающих на вход 2 этого блока с выхода 1 запоминающего устройства 11, рассчитывают число (выход 1 блока 8) и углы места (выход 2 блока 8) прихода лучей, удовлетворяющих условиям отражения от ионосферных слоев.
Расчет выполняют в следующей последовательности и по формулам, полученным на основе работы (Грудинская Г.П. Распространение радиоволн. М. «Высш. школа», 1975, с.151-154).
Односкачковые трассы. Для каждого слоя ионосферы с номером j рассчитывают углы места прихода волны (отсчет от касательной к Земле), как функции дальности

где  , R=6370 км - радиус Земли, π=3,1428…, дальность d выражена в километрах,
, R=6370 км - радиус Земли, π=3,1428…, дальность d выражена в километрах,
а также критические значения этих углов для каждого слоя ионосферы

где f - частота излучения источника.
Расчетные значения углов места прихода радиоволн (1) сравнивают с критическими значениями (2) соответствующего слоя и при не превышении критического значения регистрируют выполнение условия отражения и соответствующее значение угла места. Для слоя ионосферы с большей высотой дополнительно сравнивают угол места прихода радиоволны от него с критическими значениями всех нижележащих слоев и при превышении всех критических значений регистрируют условие не экранировки луча нижележащими слоями ионосферы. При выполнении обоих указанных условий (отражения и отсутствия экранировки) регистрируют наличие луча, удовлетворяющего интегральным условиям отражения, и соответствующее значение угла места.
Двух скачковые трассы рассчитывают аналогично, заменяя в правой части формулы (1) значения дальности на уменьшенные вдвое.
В результате выполнения расчета в блоке 8 расчета радиотрасс определяют число лучей K(d), удовлетворяющих интегральным условиям отражения на данной дальности, и углы их места βk(d), где k=1, …, K(d) - номер луча (сигнала).
Рассчитанные указанным образом трассы распространения радиоволн в виде зависимости углов места прихода лучей от дальности до источника приведены на фиг.2.
Результаты даны для длины волны излучения 25 м, условий зимнего дня, с отражением радиоволн от слоев Е и F на высотах 120 и 220 км с критическими частотами 2,4 МГц и 9,1 МГц. Сплошной линией указаны односкачковые трассы, пунктиром двух скачковые, большая толщина линий соответствует слою F. В соответствии с рисунком, на расстояниях менее 400 км прием сигналов отсутствует, на больших расстояниях возможен прием от одного до трех сигналов (лучей) с распространением по одно и двух скачковым траекториям.
В блоке расчета набегов фаз 6 для каждого из K(d) лучей (1 вход блока), расчетных углов места βk(d) (2 вход блока) и возможных значений пеленга θ (3 вход блока со второго выхода ЗУ рабочей зоны 11) рассчитывают набеги фаз сигналов в антеннах:

где r - радиус решетки, n=1, 2, …, N - номер антенны, λ=С/f - длина волны излучения, С=3·108 м/с - скорость света.
Результаты расчета набегов фаз (3) выдают с выхода блока 6 на вход 0 формирователя 5 сигналов компенсации.
Последующее функционирование комплекса радиоконтроля происходит следующим образом.
Радиосигналы источника принимают с помощью пространственно разнесенных антенн 3.1-3.N и пеленгаторного приемника 4 пеленгатора-дальномера 1. Принятые радиосигналы представляют собой смесь сигналов источника, отраженных от различных слоев ионосферы и шумов (помех).
Комплексные напряжения на выходе каналов приемника 4 можно представить в виде суммы

где штрихом отмечены истинные значения пеленга и дальности,  - комплексная амплитуда k-го сигнала (луча) для истинного пеленга и дальности,
- комплексная амплитуда k-го сигнала (луча) для истинного пеленга и дальности, 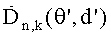 - комплексная диаграмма направленности n-й антенны в направлении истинного пеленга на источник θ′ и угла места прихода k-го луча с дальности d′,
- комплексная диаграмма направленности n-й антенны в направлении истинного пеленга на источник θ′ и угла места прихода k-го луча с дальности d′,  - комплексные шумы приемных каналов.
- комплексные шумы приемных каналов.
Для кольцевой эквидистантной антенной решетки комплексные диаграммы направленности антенн определяются соотношением

где i - мнимая единица.
В формирователе сигналов компенсации 5 на основе принятых радиосигналов (4) с учетом расчетных набегов фаз (3) оценивают комплексные амплитуды каждого сигнала (луча) из места возможного положения источника.
Эту оценку выполняют посредством преобразований, которые удобно записать в матричном виде

где Π-1 - матрица обратная Π.
Элементы матриц, входящих в соотношение (6), определяют по формулам


где k,k′=1, 2, …, K(d) - номер луча для дальности d, звездочка сверху величины означает операцию ее комплексного сопряжения.
Соотношение (7) определяет комплексный угловой спектр k-го принимаемого сигнала из места возможного положения источника излучения.
Затем, на основе оценок комплексных амплитуд лучей (6), умножением их на комплексные диаграммы антенн и суммированием по совокупности всех возможных для данной дальности лучей, получают компенсационные сигналы каждой антенны

После чего компенсируют радиосигналы источника, вычитая из принятых радиосигналов (4) в устройствах 7.1-7.N сформированные компенсационные сигналы (9). Результаты компенсации квадратично детектируют в детекторах 9.1-9.N, усредняют по совокупности антенн в сумматоре 10 и умножают в умножителе 12 на соответствующее дальности число лучей, поступающее по второму входу умножителя 12 с выхода 1 блока расчета радиотрасс 8. В результате на выходе умножителя формируют функцию пространственной неопределенности источника излучения в координатах «пеленг-дальность»:

Сечение функции неопределенности (10) в точке истинных координат источника: пеленг 180 градусов, дальность 1500 км, приведено на фиг.3, 4, соответственно, по пеленгу и дальности.
Результаты даны для решетки радиусом r=50 м, состоящей из N=16 равноудаленных антенн и условий распространения радиоволн, соответствующих фиг.2. Имитируются независимые гауссовские шумы приема из условия обеспечения среднего отношения сигнал/шум (амплитуды принятого сигнала к среднему квадратическому значению шума) равного 16,1, независимые в точках трассы флуктуации уровней сигналов лучей по логарифмически нормальному закону со средним квадратическим отклонением 4 ДБ и случайные равномерно распределенные на интервале [±π] начальные фазы сигналов лучей.
Согласно фиг.2, от источника удаленного на расстояние 1500 км приходят одновременно два луча с одно- и двукратным отражением от слоя F и углами места соответственно 12,5 и 30 градусов. Функция неопределенности фиг.3, 4 в точке истинных координат имеет минимум. Данное обстоятельство позволяет на заключительном этапе обработки определять в устройстве 13 пеленг и дальность до источника излучения по минимуму функции пространственной неопределенности (10). При этом соответствующие минимуму функции пространственной неопределенности значения пеленга и дальности, поступающие с ЗУ рабочей зоны 11 (выходы 2 и 1 на входы 2 и 3 устройства определения минимума 13), выдают на выход устройства 13 и отображают на индикаторе 14.
При многократных измерениях операции способа дублируют с накоплением получаемых функций пространственной неопределенности и последующим определением минимума суммарной функции пространственной неопределенности.
Эффективность изобретения выражается в расширении области применения известного способа на варианты распространения радиоволн с произвольным числом скачков и количеством лучей.
Количественная оценка выполнена методом имитационного моделирования для условий распространения радиоволн и приема радиосигналов, указанных ранее. Имитировалось размещение источника излучения на удалении от комплекса радиоконтроля на интервале от 0 до 5000 км с дискретностью 25 км. Для каждого положения источника выполнялось определение его местоположения, с шагом квантования диапазона дальностей 25 км и диапазона пеленгов ±0,5° с шагом 0,025°. Таким образом, число квантов рабочей зоны (потребный объем ЗУ рабочей зоны 11) составляет 200·40.
Изменение отношения сигнал/шум ρ(d) в месте приема показано на фиг.5. Белой линией на темном фоне отмечено среднее 16,1 отношение сигнал/шум (ОСШ), имитируемые флуктуации ОСШ лежат в пределах от 3 до 70.
Флуктуации уровня сигналов в антеннах существенно больше из-за интерференции лучей. Например, для антенны 1 они изменяются от единицы, соответствующей среднему квадратическому значению шума, до ста и более, см. фиг.6 зависимость a(d).
Погрешности определения местоположения источника предлагаемым способом характеризуются результатами моделирования, показанными на фиг.7, 8 в виде зависимости погрешности пеленгования Δθ(d) и относительной погрешности определения дальности (отношение разности измеренного и истинного значения к истинной дальности δd(d) в процентах) от дальности до источника.
Из анализа фиг.2, 7, 8 следует, что при принятых условиях предлагаемый способ обеспечивает определение местоположения источника во всей зоне его электромагнитной доступности с распространением радиоволн по одно и двух скачковым трассам и приемом от одного до трех сигналов (лучей). Способ-прототип в данных условиях имеет ограниченную область применения с односкачковым однолучевым распространением радиоволн от F слоя ионосферы в диапазоне дальностей 400-800 км, что примерно на порядок меньше обеспечиваемого предлагаемым способом.
Погрешности определения пеленга фиг.7 предлагаемым способом не превышают 0,5 градуса во всем диапазоне дальностей от 400 до 5000 км. Погрешности определения дальности фиг.8 не превышают 10% на удалении до 1800 км, возрастают до 50% для дальностей 1800-2500 км, после чего снижаются до 10% при дальности 2500-3700 км и далее вновь возрастают до 50%. Причина увеличения погрешностей до 50% обусловлена наличием для указанных дальностей лучей с малыми углами места прихода радиоволн (менее 10 градусов), соответственно, с малыми различиями набегов фаз сигналов в антеннах и, в связи с этим, потенциальными ограничениями возможности их компенсации. Увеличение точности может достигаться усреднением результатов многократных независимых измерений.
Моделирующая программа разработана в системе Mathcad, имеется у авторов и патентообладателя.
Таким образом, предложенное техническое решение обеспечивает расширение области применения известного способа на варианты распространения радиоволн с произвольным числом скачков и количеством лучей с увеличением дальности примерно на порядок.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОКОНТРОЛЯ | 2014 |
|
RU2560098C1 |
| Способ местоопределения источников декаметрового радиоизлучения | 2022 |
|
RU2798776C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОСИГНАЛОВ КОНТРОЛИРУЕМОГО ОБЪЕКТА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА | 2011 |
|
RU2496118C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| Способ однопозиционного определения координат источников радиоизлучений коротковолнового диапазона радиоволн при ионосферном распространении | 2019 |
|
RU2713188C1 |
| СПОСОБ ПОИСКА ДЕКАМЕТРОВЫХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2302646C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ НАД ЗЕМНОЙ ПОВЕРХНОСТЬЮ ИЗЛУЧАТЕЛЯ ИЛИ ПЕЛЕНГАТОРНЫХ АНТЕНН | 2019 |
|
RU2711400C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
Изобретение относится к радиопеленгации и может быть использовано в комплексах радиоконтроля для определения местоположения источников излучения коротковолнового диапазона с ионосферным распространением радиоволн. Достигаемый технический результат - расширение функциональных возможностей. Указанный результат достигается тем, что включает определение высоты ионосферных слоев и критических частот, прием радиосигналов с помощью пространственно разнесенных пеленгаторных антенн и приемников, определение пеленга и дальности до источника излучения при этом, предварительно для точек возможного положения источника по дальности рассчитывают число и углы места прихода лучей, удовлетворяющих условиям отражения от ионосферных слоев с учетом их высоты, критических частот и длины волны излучения. Затем для каждого из лучей, их расчетных углов места, возможных значений пеленга рассчитывают набеги фаз сигналов в антеннах, после чего в принятых радиосигналах компенсируют радиосигналы источника с учетом расчетных набегов фаз. Скомпенсированные сигналы квадратично детектируют и усредняют по совокупности антенн, а пеленг и дальность до источника излучения определяют по минимуму результатов усреднения, взвешенных пропорционально числу лучей. 8 ил.
Способ однопунктного определения местоположения источника коротковолнового излучения, включающий определение высоты ионосферных слоев и критических частот, прием радиосигналов с помощью пространственно разнесенных пеленгаторных антенн и приемников, определение пеленга и дальности до источника излучения, отличающийся тем, что предварительно для точек возможного положения источника по дальности рассчитывают число и углы места прихода лучей, удовлетворяющих условиям отражения от ионосферных слоев с учетом их высоты, критических частот и длины волны излучения, затем для каждого из лучей, их расчетных углов места, возможных значений пеленга рассчитывают набеги фаз сигналов в антеннах, после чего в принятых радиосигналах компенсируют радиосигналы источника с учетом расчетных набегов фаз, скомпенсированные сигналы квадратично детектируют и усредняют по совокупности антенн, а пеленг и дальность до источника излучения определяют по минимуму результатов усреднения, взвешенных пропорционально числу лучей.
| МЕЗИН В.К | |||
| Автоматические пеленгаторы | |||
| Москва, Советское радио, 1969, с.127-132 | |||
| Сборная железобетонная крепь для горных выработок | 1957 |
|
SU112446A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАТИВНЫХ ПАРАМЕТРОВ И ХАРАКТЕРИСТИК РАДИОСИГНАЛОВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2251803C1 |
| Машина для мытья, сушки и подготовки шерсти к дальнейшей обработке | 1944 |
|
SU67279A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШИРИНЫ ФУНКЦИИ РАССЕЯНИЯ СРЕДЫ | 2001 |
|
RU2204844C2 |
| US 6051967 A, 18.04.2000 | |||
| WO 2011022197 A1, 24.02.2011 | |||
| WO 2005073752 A1, 11.08.2005 | |||
| ХИМИЧЕСКИЙ ИСТОЧНИК ТОКА | 1991 |
|
RU2030029C1 |

