Настоящее изобретение относится к силовой установке для высокоскоростных морских судов. В частности, изобретение касается усовершенствованной силовой установки с надводным приводом, имеющей высокий коэффициент полезного действия.
Для известных силовых установок, предназначенных для высокоскоростных судов, характерны значительные недостатки эксплуатационных характеристик при низких скоростях, при высоких скоростях и по всему желаемому скоростному диапазону. Наиболее простая форма движителя морского судна - погруженный гребной винт имеет много недостатков и демонстрирует низкие рабочие характеристики при высоких скоростях. Усовершенствованная силовая установка, Z-образный (или кормовой) привод, внедренная в 1960-х годах, обеспечивает более высокий коэффициент полезного действия при повышенных скоростях малых судов. Однако при весьма больших скоростях гребного винта этого типа возникают проблемы и часто вместо него должен быть установлен гребной винт, пересекающий поверхность воды.
В случае пересекающих поверхность воды гребных винтов высокоскоростных судов, предназначенных для специальной надводной приводной системы или Z-образного привода, обеспечивается наиболее высокий коэффициент полезного действия. Однако для обычных гребных винтов, пересекающих поверхность воды, характерно чрезвычайно высокое потребление мощности при низких скоростях. Одна из причин этого заключается в том, что, поскольку эти гребные винты предназначены для работы в полупогруженном состоянии, их диаметр значителен по сравнению с обычным гребным винтом. Таким образом, пока судно не достигнет скорости глиссирования, гребной винт обычно сильно погружен, так что требования в отношении потока и крутящего момента весьма высоки. Второй фактор, который учитывают в меньшей степени, заключается в том, что при низких скоростях и высокой мощности лопатки работают с высоким коэффициентом подъемной силы, паровая полость позади лопатки широка и расстояние между внешней поверхностью полости одной лопатки и поверхностью продвижения последующей лопатки мало.
Таким образом происходит эффективное подталкивание лопатки к паровому пузырю с очевидной потерей тяги. Эти два фактора, в частности, приводят к значительным трудностям глиссирования судна с установленными надводными приводами, а это означает, что они должны быть оснащены весьма мощными двигателями. Вследствие недостатков, свойственных этим приводам, их использование весьма ограничено, при этом их стоимость высока. Кроме того, эти гребные винты обычно устанавливают позади корпуса судна, что приводит к возможности их повреждения при маневрировании или у причала. В большинстве случаев гребной винт не может быть достаточно приподнят, чтобы вплотную подходить к берегу.
В последние годы также возрастает использование приводов со струйными насосами, предназначенных для двух классов судов - для небольших катеров и персональных плавучих средств (реактивных велосипедов и т.д.), а также больших по размерам прогулочных яхт и рабочих катеров. Однако струйным приводам свойственно определенное количество характерных недостатков: на практике коэффициент полезного действия составляет менее 60%, а часто и менее 50%. Струйные приводы также относительно сложны и имеют значительную стоимость; их монтаж более затруднителен, чем монтаж других приводов.
Цель настоящего изобретения заключается в создании силовой установки, которая фактически позволяет избежать или сводит к минимуму один или более из вышеупомянутых недостатков.
Соответственно, предлагается силовая установка для плавучих судов, содержащая по меньшей мере один вал, который проходит в заднем направлении от транца корпуса водного судна, гребной винт, пересекающий поверхность воды, установленный на упомянутом по меньшей мере одном валу вблизи от задней кромки корпуса, так что при работе судна гребной винт действует в полости, образованной позади транца корпуса, приводное средство для приведения в движение по меньшей мере одного вала, при этом гребной винт содержит ступицу и большое количество лопаток, расположенных вокруг нее и отстоящих друг от друга под некоторым углом предпочтительно на равном расстоянии, при этом отношение (S/C) промежутка (S) между лопатками к хорде (С) лопаток составляет по меньшей мере 2,0 фактически по всей длине лопаток.
Преимущество силовой установки согласно изобретению заключается в том, что высокое отношение промежутка между лопатками к хорде лопаток (по меньшей мере 2 фактически по всей длине каждой лопатки) позволяет достичь гораздо большего коэффициента полезного действия, чем в случае известных силовых установок с гребным винтом, пересекающим поверхность воды, в которых отношение промежутка между лопатками к хорде лопаток в общем находится в зоне единицы, а чаще составляет менее единицы.
Одна из причин достигаемого повышения коэффициента полезного действия заключается в том, что расстояние между задней поверхностью одной лопатки и движущей поверхностью последующей лопатки относительно велико и поэтому при работе поле давления последней (последующей) лопатки находится позади полости, созданной за задней кромкой первой (предыдущей) лопатки. Повышенный коэффициент полезного действия, получаемый вследствие этого отличительного признака, главным образом проявляется на малых скоростях судна. Другое преимущество относительно небольшой хорды лопаток заключается в том, что периоды перехода, в течение которых каждая лопатка входит в воду и покидает воду, составляют относительно небольшую часть цикла гребного винта по сравнению с известными установками с надводным приводом, в которых лопатки имеют относительно большую хорду. В течение таких переходных периодов лопатки действуют при значительно пониженном коэффициенте полезного действия.
Следует иметь в виду, что термин "полость транца" применительно к корпусу судна относится к воздушному карману, создаваемому непосредственно позади задней кромки корпуса после начала движения судна, а также при его малых и высоких скоростях. Посредством расположения гребного винта вблизи от задней кромки корпуса, так, чтобы он действовал в упомянутой создаваемой полости транца, можно избежать больших потерь мощности, характерных для влияния вихреобразования, когда лопатки работают в зонах высокой вихревой скорости воды (как в случае обычных систем движения).
Можно оценить, что термин "полость лопатки" применительно к каждой из лопаток относится к (подводному) паровому пространству, создаваемому за задней кромкой каждой из лопаток гребного винта при его работе.
Желательно, чтобы отношение (S/C) промежутка (S) между смежными лопатками к хорде (С) лопаток находилось в диапазоне от двух до пяти или более, а предпочтительно в диапазоне от 2,3 до 4,0, фактически по всей длине лопаток. Хотя значение отношения S/C может быть выбрано превышающим пять, можно оценить, что имеется верхний предел, за которым лопатки будут слишком длинными и тонкими, чтобы на практике обеспечивать эффективную работу. Мы полагаем, что это вероятно в большинстве случаев, когда отношение S/C составляет выше 10. Однако высокое отношение желательно в том случае, когда стремятся преобразовать малую мощность двигателя в высокую скорость гребного винта.
Отношение (S/C) промежутка (S) между лопатками к хорде (С) лопаток предпочтительно составляет по меньшей мере 2,0 по меньшей мере на 90% длины лопаток, а желательно по меньшей мере на 95% или более длины лопаток.
Предпочтительно, чтобы ступица гребного винта была относительно большой. Желательно, чтобы отношение (Нd/Рd) диаметра (Нd) ступицы к диаметру (Рd) гребного винта составляло по меньшей мере 0,35, а предпочтительно 0,4 или более. Преимущество ступицы с таким большим диаметром заключается в том, что при низких скоростях (когда гребной винт стремится находиться в более низком положении в воде, чем при высоких скоростях глиссирования) значительная часть площади, ометаемой лопатками при каждом повороте гребного винта, находится в воздухе. Это особенно выгодно при низких скоростях судна, когда для получения при таких скоростях высокой тяги требуется, чтобы значительная часть ометаемой площади находилась в воздухе. В известных системах движения при малых скоростях значительная часть площади ометания находится под водой (таким образом при работе лопаток требуется большее потребление мощности от двигателя), что приводит к значительному понижению тяги на малых скоростях по сравнению с установкой согласно настоящему изобретению.
Кроме того, большое отношение диаметра ступицы к диаметру гребного винта означает, что будет иметь место тенденция к гораздо меньшим колебаниям скорости водяного потока по длине лопаток гребного винта, чем в случае обычных гребных винтов, а вследствие этого изменения эксплуатационных качеств при нерасчетных условиях менее заметны; в общем, чем короче лопатки относительно диаметра ступицы, тем меньше создаваемые в воде силы потока, действующие в радиальном направлении, и, в свою очередь, тем больше коэффициент полезного действия силовой установки. Далее, чем короче лопатки, тем меньше кручение и искажение лопаток при работе. Во многих случаях лопатки могут иметь постоянное сечение и лишь закручены по их длине без существенного ухудшения эксплуатационных качеств.
Гребной винт предпочтительно крепят на упомянутом по меньшей мере одном валу таким образом, чтобы плоскость винта фактически была перпендикулярна валу. Кроме того, вал предпочтительно крепят к судну таким образом, чтобы плоскость гребного винта фактически была перпендикулярна линии тяги. Этим обеспечивается преимущество, заключающееся в доведении до максимума тяги, получаемой от двигателя в начале движения и на малых скоростях.
Также желательно, чтобы диаметр гребного винта был выбран относительно большим. Например, отношение (Рd/Нs) диаметра (Рd) гребного винта к статической осадке (Hs) корпуса может составлять по меньшей мере 1,4 или более. Одна из выгод использования гребного винта большого диаметра заключается в том, что при тех же самых оборотах в минуту, что и у обычных гребных винтов, могут быть получены большие периферийные скорости.
В силовой установке согласно изобретению угол или "питч" (β) лопаток гребного винта относительно его оси вращения предпочтительно может изменяться. Это может достигаться путем оснащения силовой установки средствами управления наклоном лопаток. Средства управления наклоном лопаток могут представлять собой механические средства и/или электрические средства, и/или текучую среду под давлением - предпочтительно гидравлические средства. Средство управления наклоном предпочтительно формируют и компонуют таким образом, чтобы оно обеспечивало изменение угла (β) наклона лопаток между 50 и 120o. За счет такого управления наклоном лопаток может быть повышен общий коэффициент полезного действия силовой установки. Например, упомянутые средства управления лопатками могут быть сформированы и скомпонованы так, чтобы обеспечивать наклон лопаток под углом до 80o, а в некоторых случаях под углом, доходящим до 90o, в рабочем диапазоне низких скоростей судна. Это позволяет довести до максимума тягу при заданной мощности двигателя.
Упомянутое средство управления лопатками в его простейшей форме содержит механическое средство управления углом наклона в виде штока, связанного с несущим средством, на котором установлены лопатки, при этом упомянутый управляющий шток и несущее средство сформированы и скомпонованы таким образом, что осевое движение управляющего штока преобразуется во вращательное движение несущего средства, за счет чего лопатки поворачиваются для изменения их угла или так называемого "питча" (по отношению к оси вращения гребного винта). Обычно вал, на котором установлен гребной винт, выполнен полым и шток управления углом наклона расположен внутри него.
Предпочтительно, чтобы силовая установка включала в себя по меньшей мере два вала, проходящих в заднем направлении от транца корпуса судна, при этом на каждом валу устанавливают описанный выше гребной винт. В том случае, когда установлено два таких гребных винта, средство управления углом наклона лопаток предпочтительно обеспечивается для управления углом наклона лопаток каждого гребного винта. Упомянутое средство управления лопатками преимущественно может быть образовано и скомпоновано для изменения угла наклона лопаток каждого гребного винта, причем предпочтительно независимо друг от друга, но в зависимости от желаемого и/или фактического курса судна, за счет чего обеспечивается возможность управления курсом судна. При этом нет необходимости устанавливать на судно руль. В своей простейшей форме средство управления лопатками может содержать упомянутый шток управления углом наклона, расположенный в каждом из двух валов гребных винтов так, как описано выше.
В том случае, когда система приведения в движение включает в себя два гребных винта, соответствующие приводные валы обычно предназначены для вращения в противоположных направлениях, с тем, чтобы фактически исключить какую-либо боковую тягу, создаваемую винтами.
Упомянутое приводное средство обычно содержит короткий универсальный приводной вал и, если желательно, понижающую коробку передач с приводом от двигателя внутреннего сгорания. Как вариант, приводное средство может содержать электрический, гидравлический или пневматический двигатель.
Средство управления углом наклона лопаток предпочтительно может дополнительно включать в себя регулятор с развитой логикой для автоматического управления углом наклона лопаток в зависимости от одного или более из следующих факторов: желаемой скорости судна, фактической скорости судна, желаемой скорости двигателя, фактической скорости двигателя, положения судна в воде, желаемого или фактического курса судна. Регулятор с развитой логикой, предназначенный для управления углом наклона, может, например, управлять осевым движением штока или каждого штока (когда он установлен) управления углом наклона, с тем, чтобы изменять угол наклона лопаток двух гребных винтов, причем предпочтительно независимым образом, для руления, а предпочтительно также и управления скоростью судна. Регулятор для управления углом наклона может соответствующим образом содержать электрическое или электронное устройство с замкнутым контуром, которое управляет осевым движением штоков, предназначенных для управления углом наклона лопаток.
Регулятор с развитой логикой для управления углом наклона лопаток также может управлять скоростью двигателем.
В предпочтительном варианте осуществления конструкции упомянутый регулятор с развитой логикой, управляющий углом наклона, предназначен для изменения угла наклона лопаток таким образом, чтобы удерживать скорость вращения гребного винта постоянной, причем предпочтительно с заданной постоянной скоростью, с которой гребной винт предназначен работать в том случае, когда судно перемещается вперед на высоких скоростях.
Поскольку лопатки могут быть оптимально ориентированы для обеспечения максимальной тяги при каких-либо определенных условиях работы, этим компенсируются любые потери тяги, характерные для использования лопаток, имеющих относительно узкую хорду, чтобы достичь заявленного сравнительно большого отношения промежутка между лопатками к хордам лопаток. Кроме того, привод для движения вперед и назад с бесступенчатым изменением скоростей, обеспечиваемый посредством желаемого управления углом наклона лопаток, особенно в том случае, когда установлено по меньшей мере два гребных винта, позволяет судну легко маневрировать в порту, а при высоких скоростях сопротивление значительно уменьшается вследствие отсутствия рулей.
Количество лопаток на гребной винт обычно находится между двумя и пятью, а предпочтительно составляет три или четыре лопатки на гребной винт. В некоторых случаях, например, для получения более плавного привода, может оказаться желательным наличие более пяти лопаток. Лопатки могут быть закручены по их длине. Предпочтительно, чтобы закрутка составляла не более 25o, а наиболее желательно, чтобы она составляла не более 20o. Как установлено, при превышении 20o обычно происходит уменьшение коэффициента полезного действия.
Когда по практическим соображениям проектирования невозможно установить гребной винт в непосредственной близости от транца корпуса судна, может быть дополнительно установлен полый стакан, с тем, чтобы ликвидировать разрыв между транцем и гребным винтом. Полый стакан способствует направлению потока текучей среды к лопаткам гребного винта.
Как вариант, торцевой профиль корпуса судна может содержать по меньшей мере один выпуклый, в общем дугообразный профиль, выступающая часть которого в общем соответствует профилю ступицы упомянутого по меньшей мере одного гребного винта. Дуга упомянутой выпуклой части может доходить примерно до 180 градусов. Упомянутый по меньшей мере один гребной винт предпочтительно находится на своем валу перед выпуклой торцевой частью так, что он располагается противоположно упомянутому выступу торца корпуса.
В том случае, когда судно с силовой установкой согласно изобретению представляет собой судно для проведения досуга, например лыжи, движущиеся посредством реактивной струи, предпочтительно обеспечиваются средства защиты для ограждения гребного винта (винтов), с тем, чтобы в целях безопасности предотвратить захождение какого-либо препятствия между лопатками.
Далее предпочтительные варианты осуществления конструкции согласно изобретению будут представлены лишь посредством примера со ссылками на прилагаемые фигуры, на которых:
на фиг.1 представлен частично схематический боковой вид части плавучего судна, обеспеченного силовой установкой согласно одному из вариантов осуществления изобретения;
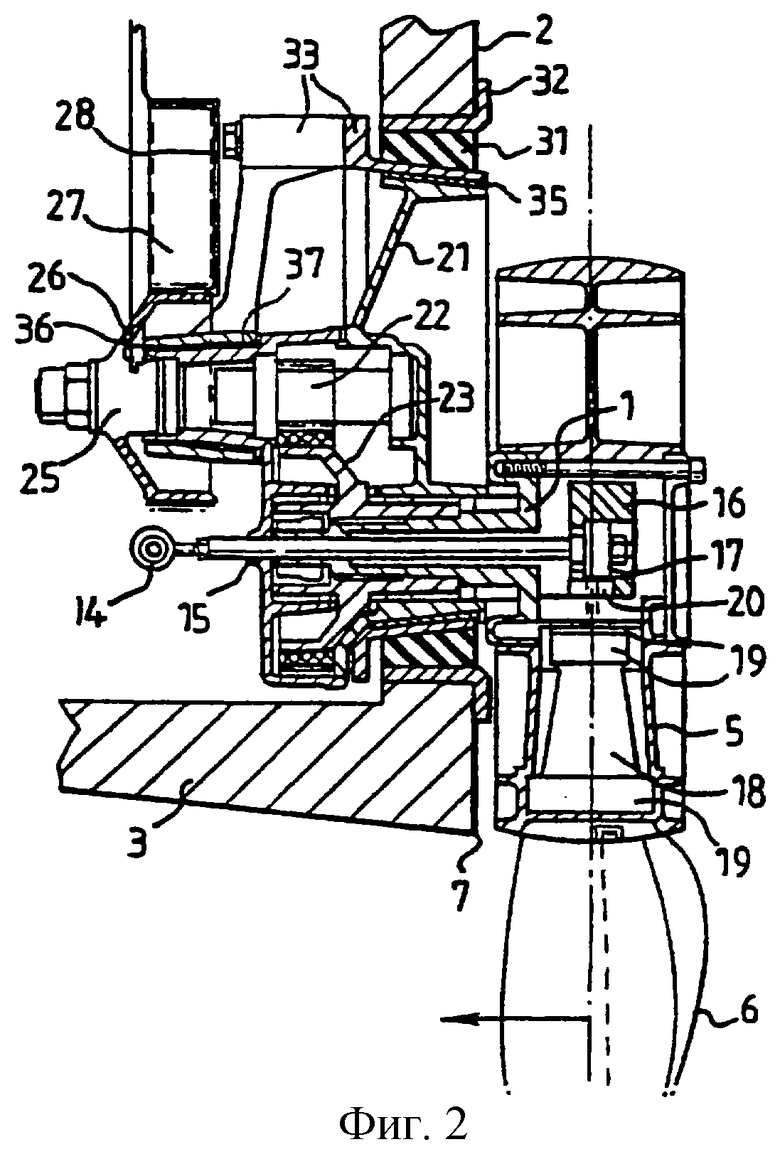
на фиг. 2 представлен боковой вид в отдельном поперечном сечении (по линии Х-Х на фиг.6) части плавучего судна, оснащенного силовой установкой согласно другому варианту осуществления изобретения;
на фиг.3 представлен вид сзади части механизма управления углом наклона лопаток, встроенного в устройство согласно фиг.2;
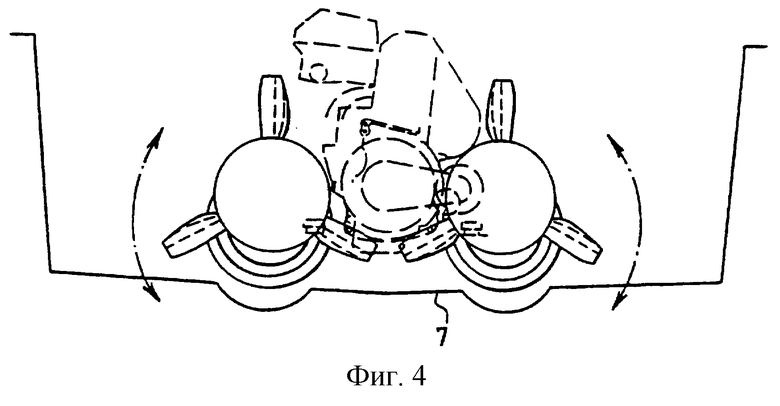
на фиг.4 представлен торцевой вид устройства согласно фиг.2, если смотреть с наружной стороны корпуса судна, причем с гребными винтами, приподнятыми для подхода к берегу;
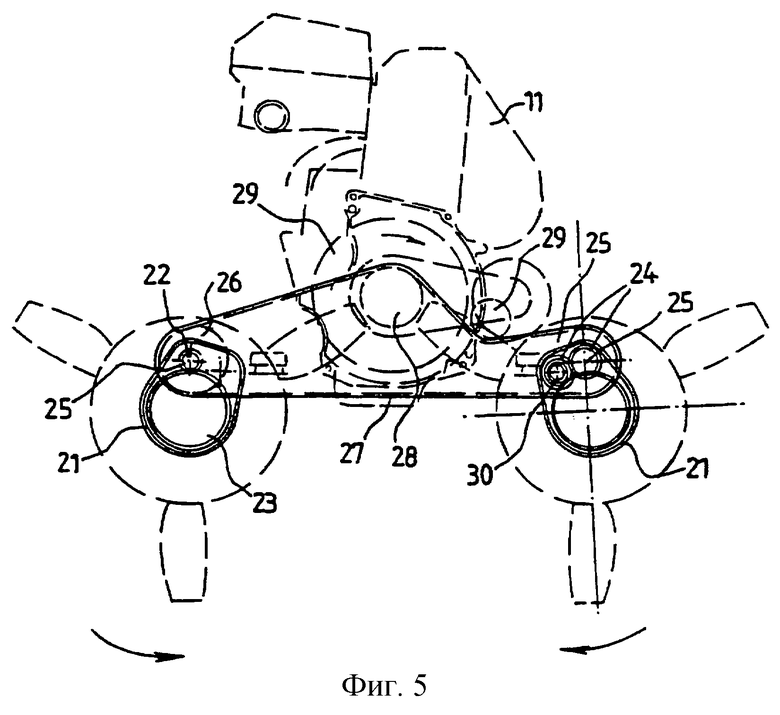
на фиг. 5 представлен торцевой вид устройства согласно фиг.2, если смотреть с внутренней стороны корпуса судна, причем с двигателем судна, показанным штриховой контурной линией (для простоты);
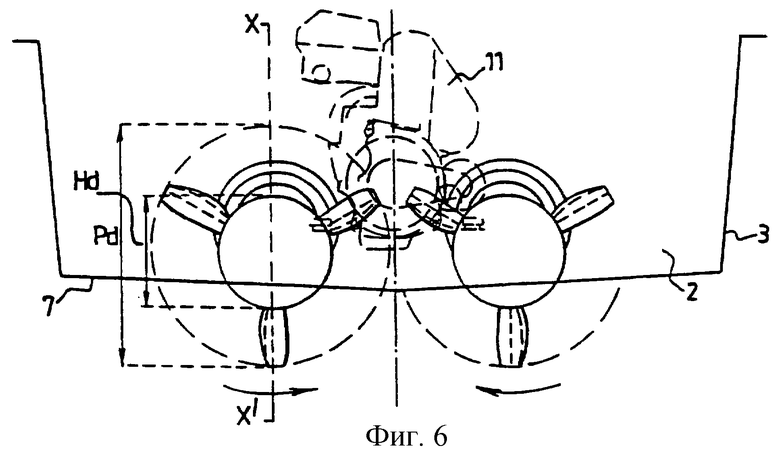
на фиг. 6 представлен торцевой вид устройства согласно фиг.2, если смотреть с наружной стороны корпуса судна, причем с гребными винтами в их рабочем (опущенном) положении;
на фиг.7 представлен схематический боковой вид силовой установки согласно еще одному варианту осуществления конструкции согласно изобретению;
на фиг.8 представлен схематический торцевой вид компоновки двух гребных винтов в силовой установке согласно фиг 7;
на фиг. 9 представлено механическое устройство управления углом наклона лопаток силовой установки согласно одному из вариантов осуществления изобретения;
на фиг. 10а представлен боковой вид в поперечном сечении части гребного винта силовой установки согласно фиг.1 или фиг.2;
на фиг.10b представлен боковой вид в поперечном сечении соответствующей части обычного гребного винта с изменяемым углом наклона лопаток;
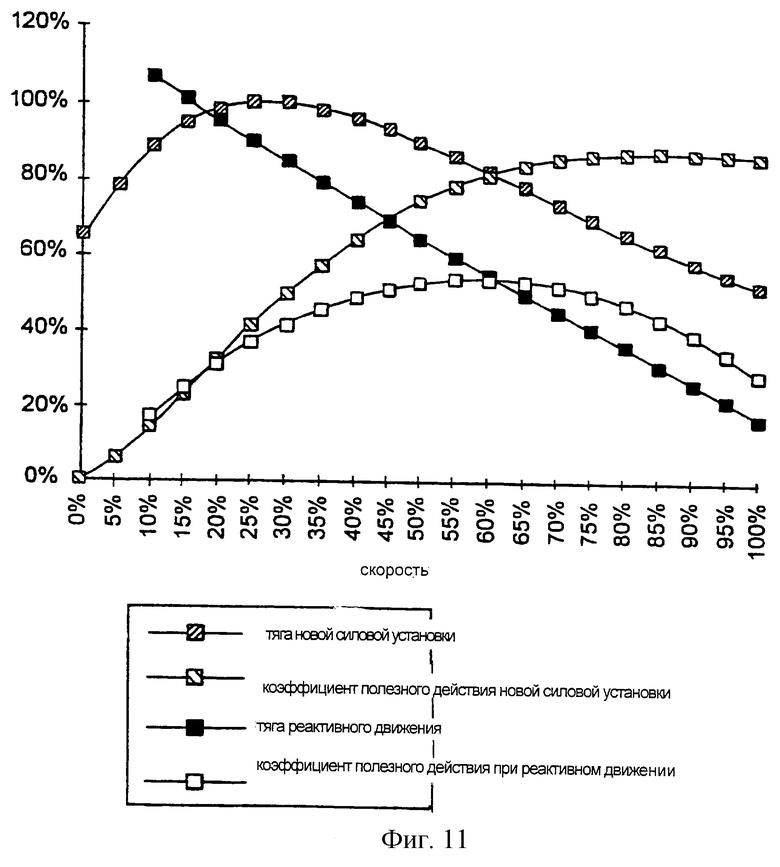
на фиг.11 представлено графическое сравнение тяги новой силовой установки NPS, представленной на фиг.1 или фиг.2, с обычной реактивной силовой установкой;
на фиг. 12 представлен схематический вид участка с двумя лопатками обычного частично погруженного гребного винта с фиксированным углом наклона лопаток, действующего при высокой мощности, при этом две лопатки показаны в поперечном сечении с радиусом R от центра гребного винта;
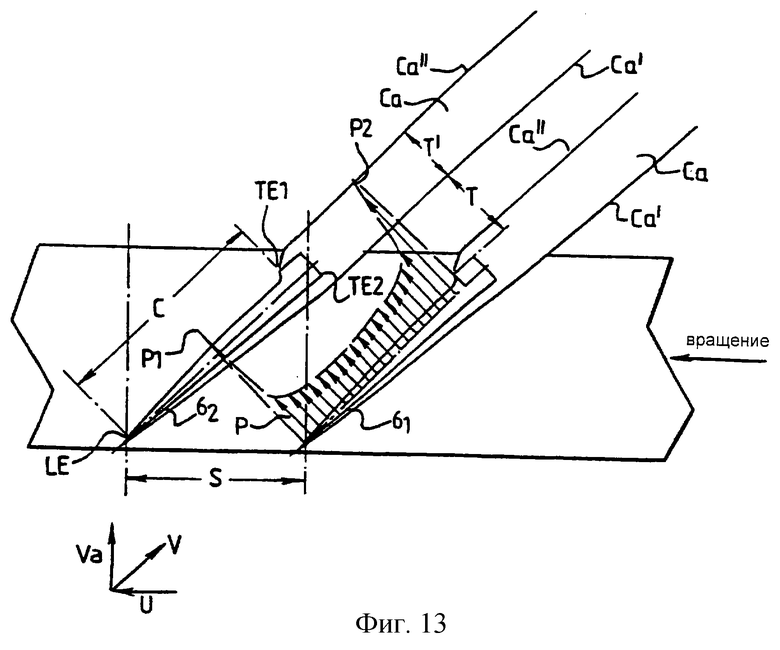
на фиг.13 представлен схематический вид того же самого участка гребного винта с двумя лопатками, что и на фиг.12, который работает с крейсерской скоростью;
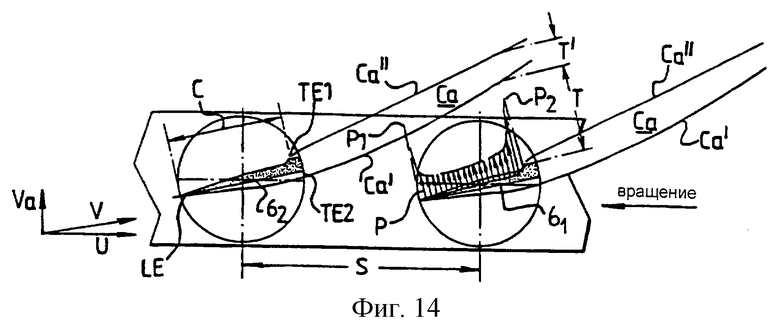
на фиг. 14 представлен схематический вид участка с двумя лопатками гребного винта силовой установки согласно изобретению, работающего на малой (крейсерской) скорости, при этом две лопатки показаны в поперечном сечении с радиусом R от центра гребного винта;
на фиг. 15 представлен схематический вид того же самого участка с двумя лопатками гребного винта, что и на фиг.14, работающего на высокой скорости;
на фиг. 16 представлен схематический вид того же самого участка с двумя лопатками гребного винта, что и на фиг.14, работающего при нулевой тяге;
на фиг.17 представлен вид в поперечном сечении одной из лопаток согласно фиг.15 и 16 на разных радиусах, иллюстрирующий закрутку лопаток;
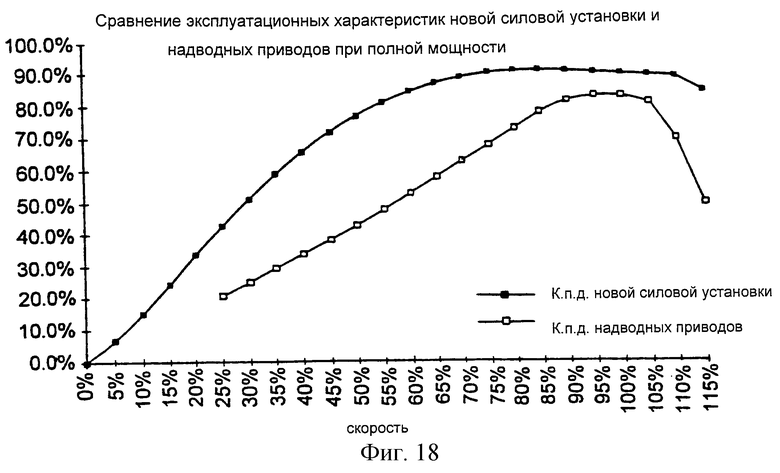
на фиг. 18 представлен график сравнения коэффициента полезного действия новой силовой установки NPS в зависимости от скорости с коэффициентом полезного действия известной силовой установки, работающей с пересечением поверхности воды, в зависимости от скорости;
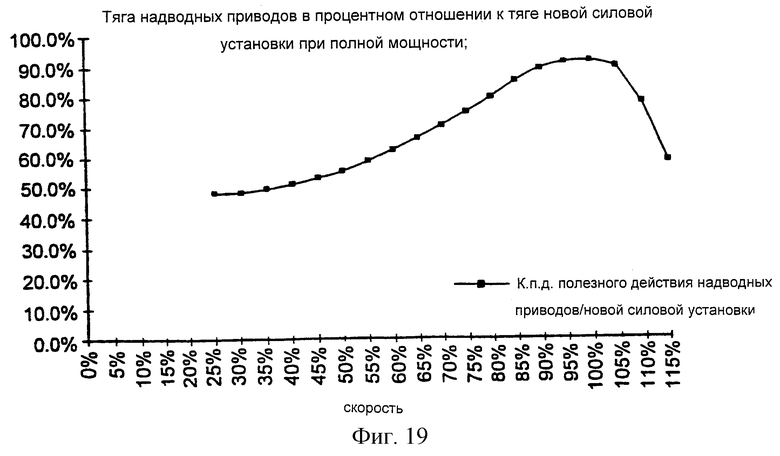
на фиг. 19 представлено отношение коэффициента полезного действия новой силовой установки (NPS) к коэффициенту полезного действия упомянутой известной силовой установки;
на фиг. 20 представлена блок-схема, иллюстрирующая систему управления трансмиссией, встроенную в предпочтительный вариант осуществления изобретения;
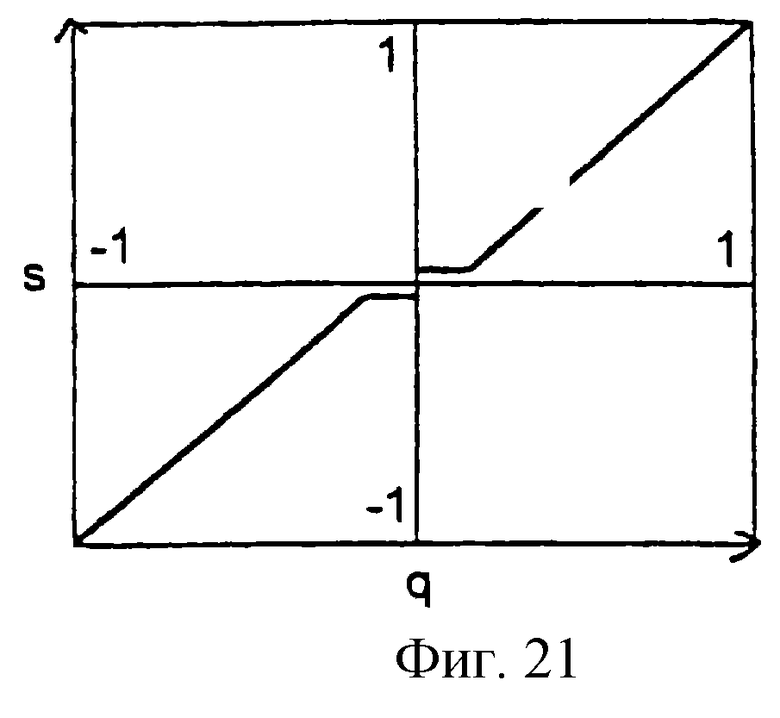
на фиг.21 представлен график положения s дроссельной заслонки двигателя по отношению к основному положению q управления дросселированием в установке согласно фиг.20;
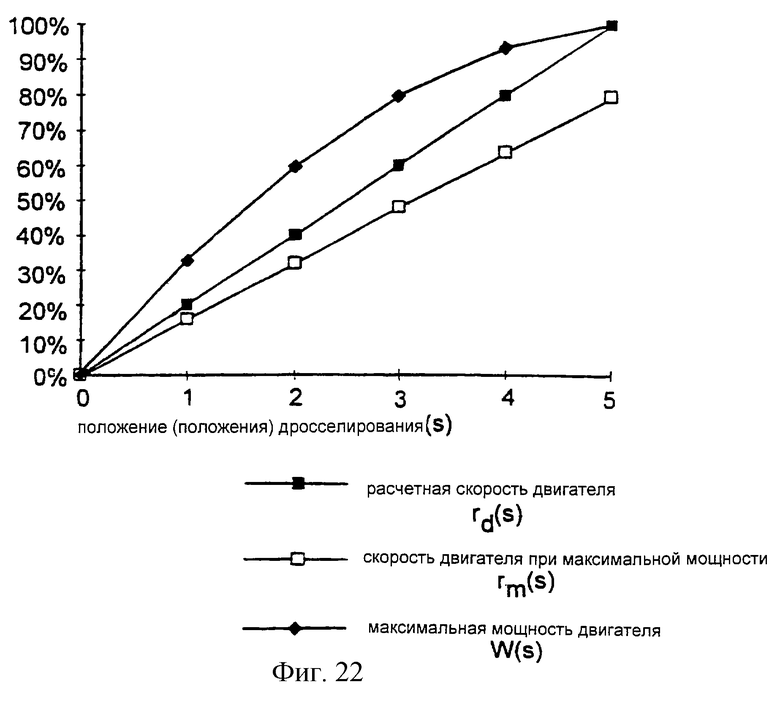
на фиг.22 представлен график сравнения расчетной скорости rd(S) двигателя, скорости rm(S) двигателя при максимальной мощности и максимальной мощности W(S) двигателя;
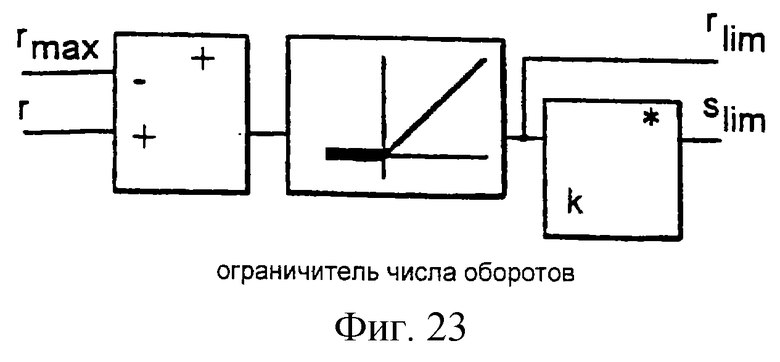
на фиг.23 представлена блок-схема ограничителя числа оборотов двигателя в установке согласно фиг.20;
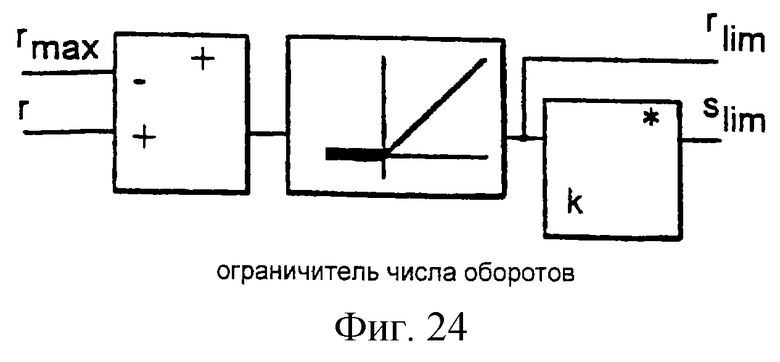
на фиг.24 представлена блок-схема ограничителя падения скорости в установке согласно фиг.20;
на фиг.25 представлена блок-схема дроссельного устройства установки согласно фиг.20;
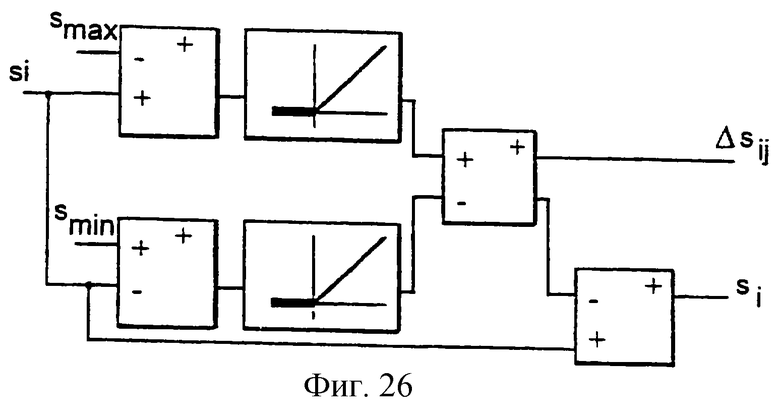
на фиг. 26 представлена блок-схема ограничителя дросселирования в установке согласно фиг.20;
на фиг. 27 представлена блок-схема устройства рулевого управления установки согласно фиг.20.
Во избежание сомнений следует иметь в виду, что термины "промежуток (S) между лопатками" и "хорда (С) лопаток", которые используются выше и далее, можно разъяснить следующим образом.
Хорда (С) лопатки представляет собой длину линии, проходящей через нормально смоченную поверхность лопатки от передней кромки (LE) к эффективной задней кромке (ТЕ) лопатки при постоянном радиусе от оси вращения гребного винта.
Эффективную заднюю кромку (ТЕ1) лопатки можно определить как кромку нормально смоченной поверхности лопатки, с которой связана передняя сторона (Сa") полости (Са) лопатки.
Промежуток (S) между лопатками представляет собой расстояние по окружности между двумя смежными лопатками, измеренное от центра хорды одной лопатки до центра хорды другой, последующей смежной лопатки.
(Позиции в скобках, используемые в приведенных выше определениях, взяты из фиг. 12-16, причем варианты осуществления конструкции, представленные на этих фигурах, подробно описаны в приведенной ниже части последующего текста).
Силовая установка согласно одному из возможных вариантов осуществления изобретения показана на фиг.1. На фиг.1 установка показана в частично схематическом боковом виде и имеет вал 1, проходящий в заднем направлении от транца 2 корпуса 3 судна (показан в поперечном сечении), к которому прикреплен гребной винт 4, пересекающий поверхность воды, отличающийся относительно большим диаметром ступицы 5, к которой крепят определенное количество лопаток 6, имеющих относительно малую длину и относительно узкую хорду (по сравнению с обычными гребными винтами, пересекающими поверхность воды). Гребной винт 4 крепят в непосредственной близости от задней кромки 7 корпуса 3, так что при работе судна он действует в плоскости транца, образованной непосредственно позади корпуса. Статическая осадка корпуса (то есть высота уровня Sw поверхности воды над основанием корпуса 3) обозначена на фиг.1 позицией Hs. Основание ступицы 5 гребного винта совпадает с основанием корпуса 3. Если ротор не может быть расположен непосредственно за задней кромкой корпуса, обычным образом может быть установлен полый стакан (не показан), чтобы ликвидировать разрыв между корпусом 3 и лопатками 6 для направления потока к последним. Вал 1 работает в несущем корпусе 8, прикрепленном к транцу 2. Вал 1 приводят в движение посредством короткого универсального приводного вала 9 и понижающей коробки передач 10 от двигателя внутреннего сгорания 11. Такой тип привода показан лишь в качестве примера, при этом возможно определенное количество других приводных устройств. Например, на фиг. 7 представлен упрощенный привод для использования с электрическими, гидравлическими или пневматическими моторами.
Вариант осуществления изобретения, основанный на установке, показанной на фиг. 1, но имеющей два гребных винта, представлен на фиг.2-6, на которых показана силовая установка, имеющая два вращающихся в противоположные стороны вала 1, проходящих в заднем направлении от транца 2 корпуса 3, к каждому из которых прикреплен гребной винт 4, пересекающий поверхность воды, отличающийся ступицей 5 относительно большого диаметра, к которой с возможностью поворота прикреплено определенное количество лопаток 6, имеющих относительно малую длину и относительно узкую хорду. Отношение (Нd/Рd) диаметра (Hd) ступицы к диаметру (Рd) гребного винта составляет по меньшей мере 0,35. Отношение (S/C) промежутка между лопатками к хорде лопаток составляет по меньшей мере 2,0 фактически по всей длине каждой лопатки. Гребной винт 4 установлен непосредственно вблизи от задней кромки 7 судна 3, так что он действует в плоскости транца.
Как описано применительно к фиг.1, обычным способом может быть установлен полый стакан (не показан), чтобы ликвидировать разрыв между корпусом 3 и лопатками 6 для направления потока к последним. Угол наклона лопаток 6 может изменяться как в положительную, так и в отрицательную сторону. Хотя для управления углом наклона могут быть предусмотрены многочисленные механические, гидравлические или электрические устройства, в качестве примера показано простое механическое устройство управления углом наклона. В этом устройстве управления штоки 14, расположенные посредством втулок 15 внутри полых приводных валов 1, приводят в действие кулачковые пластины 16, прикрепленные к управляющему штоку посредством двунаправленных упорных подшипников 17. Лопатки 6 болтами крепят к несущему устройству 18, шарнирно удерживаемому внутри ступиц 5 гребных винтов посредством уплотненных упорных и радиальных подшипников 19. Кулачковые толкатели 20 крепят к внутренним концам несущих устройств 18 так, что осевое перемещение управляющих штоков 14 вызывает вращательное движение несущих устройств 18. Валы 1 вращаются в подшипниках коробок 21 передач, жестко прикрепленных к транцу 2, при этом одна из них вмещает в себя пару шестерен 22, 23 для изменения вращения на обратное. Входные валы 25 приводятся в движение синхронизирующим приводным ремнем 27. Приводной шкив 28 при помощи болтов крепят непосредственно к маховику 29 двигателя 11 внутреннего сгорания (см. фиг.5). Шкивы 26, прикрепленные к входным валам 25, передают мощность коробкам 21 передач.
Правосторонняя коробка передач имеет горизонтальный вал 30, так что левосторонний и правосторонний гребные винты вращаются в противоположных направлениях. Коробки 21 передач крепят к транцу 2 посредством гибких кольцеобразных монтажных деталей 31, находящихся вокруг круглых колец 32, крепящихся болтами к транцу 2. Гибкие элементы 31 расположены таким образом, чтобы воспринимать тягу, сообщаемую гребными винтами 4. Коробки передач 21 шарнирно крепят к кожуху 33, который жестко крепят к корпусу 34 маховика двигателя, так что они могут отклоняться вверх для возможности подхода судна к берегу (фиг.4). Для этой цели могут быть обеспечены исполнительные механизмы (не показаны). Втулки 35, 36, 37, расположенные между кожухом 34 и коробками 21 передач, служат для уменьшения трения. Привод показан в качестве примера, при этом могут быть предусмотрены и другие одинарные или многочисленные устройства с приводом от двигателя.
В варианте осуществления изобретения, представленном на фиг.2-6, корпус 3 имеет два выступа в виде дугообразного выпуклого профиля (дуга каждого составляет приблизительно 120o), каждый из которых в общем соответствует ступице одного из двух гребных винтов (см. фиг.4). В том случае, когда ступица каждого гребного винта расположена противоположно соответствующему выступу корпуса, такая компоновка увеличивает площадь, ометаемую винтом под водой. В некоторых случаях это может повысить коэффициент полезного действия гребного винта. Однако можно оценить, что этот тип профиля корпуса непрактичен для глиссирования судна при весьма высокой скорости, поэтому для такого судна выступы с профилем этого типа в его корпусе 3 не будут выполняться.
Предпочтительный вид привода для небольшого судна (например, для лыж с движением посредством реактивной струи) или для судна, которое должно вытаскиваться на берег, показан на фиг.7 и 8. Он имеет ротор 4, крепящийся непосредственно к валу 12 двигателя, а кожух 13 двигателя прикреплен к транцу 2 корпуса 3. Вал 12 двигателя предпочтительно выполнен полым для возможности прохождения штока 14 управления углом наклона лопаток. (Однако, если такие приводы обеспечивают переменную скорость и реверсируемы, лопатки в некоторых случаях могут иметь фиксированный угол наклона). В этом варианте осуществления изобретения вокруг нижней части периферии каждого гребного винта установлено ограждение 38, а входная сетка 39 и выходная сетка 40 установлены соответственно спереди и сзади от ограждения и служат для предотвращения аварии, а также выполняют функцию спрямления потока. Сетка может иметь сотообразные или круглые отверстия, либо какую-то иную приемлемую форму отверстий.
Хотя рулевое управление судами, имеющими сдвоенный или многократный привод, может быть осуществлено посредством обычных рулей, установленных позади гребных винтов, более эффективное средство рулевого управления представляет собой средство для дифференцированного приведения в действие средств управления углом наклона лопаток, так, чтобы гребной винт с внешней стороны желаемого поворота работал при большем угле наклона, чем гребной винт с внутренней стороны поворота. Внутренний гребной винт может действовать с реверсированием угла наклона при крутых поворотах и почти неизменном маневрировании.
Хотя для большинства судов был бы предпочтителен гидравлический или электрический привод (что описано далее) управления углом наклона лопаток, может быть использовано простое механическое устройство, в котором применяют штоки управления углом наклона лопаток и которое описано применительно к фиг. 9. Например, два штока 14 управления углом наклона лопаток для двух соответствующих гребных винтов (не показаны) могут быть оснащены на их внутренних концах роликами 101 кулачковых толкателей, приводимыми в действие двумя кулачковыми пластинами 102, которые предназначены для скольжения в корпусах 103, жестко прикрепленных к корпусам 21 коробок передач или к электрическим, либо гидравлическим моторам варианта конструкции согласно фиг. 7-8. Корпусы 103 предпочтительно уплотнены посредством крышки (не показана). Кулачковые пластины 102 связаны тянущими-толкающими управляющими тросами 104 с объединенным механизмом 105 управления углом наклона и рулевого управления.
Механизм управления углом наклона содержит рычаг 106, поворачиваемый вокруг оси 107, к которому жестко прикреплен рычаг 108. Шток 109 управления шарнирно соединяет рычаг 108 с несущим устройством 110, к которому подсоединены наружные оболочки управляющих тросов 104. Несущее устройство 110 предназначено для скольжения в корпусе 111. Рычаг 106 показан в нейтральном положении. Поворот рычага 110 в направлении стрелки F на фиг.9 приведет к смещению несущего устройства 110, что вызывает одинаковое вытягивание двух тросов, приводящее к перемещению кулачковых пластин 102 в направлении стрелок Fc и к перемещению штоков 14 управления углом наклона лопаток в направлении стрелок Fp. Перемещение рычага 106 в направлении стрелки R приведет к обратному результату. Фрикционный ползун 17, шарнирно прикрепленный к рычагу 106, блокируется у сектора 116, жестко прикрепленного к корпусу 111 для предотвращения изменения управления углом наклона силами реакции рулевого механизма. В сектор 116 введено нейтральное положение 118 защелкивания.
Рулевое колесо 112 (показано в виде штрихового контура) крепится к валу 113, который может свободно вращаться в подшипниках, удерживаемых в корпусе 111. Ведущая шестерня 114 на рулевом валу 113 приводит в движение шестерню 115, к которой жестко крепятся шаровые соединения 104а, 104b, установленные на концах внутренних тросов 104. Движение рулевого колеса по часовой стрелке приводит к вращению шестерни 114 против часовой стрелки, вызывающему отвод шарового соединения 104b и выдвижение шарового соединения 104а, что, в свою очередь, приводит к перемещению штока 14 управления углом наклона лопаток в направлении стрелки Fp со стороны правого борта и в обратном направлении со стороны левого борта.
Вследствие дополнительных выдвижений троса при управлении углом наклона лопаток и настройках рулевого управления может оказаться необходимым ограничить ход штоков 14 управления наклоном посредством профилирования кулачковых пластин 102 так, как показано. Корпус 111 может быть обычным образом оснащен крышкой (не показана).
Следует заметить, что описанная выше силовая установка имеет простой проход приводного вала (валов) через транец, поэтому уплотнение вала подвергается менее значительному гидростатическому напору и во многих случаях может быть расположено выше статической линии воды у судна. Кроме того, требуется лишь минимум зубчатых зацеплений, а вал гребного винта вращается в низко фрикционных роликовых подшипниках, поэтому не требуются подшипники, смазываемые наружной водой. Далее, то, что гребной винт крепят непосредственно вблизи от задней кромки корпуса, означает, что он работает в однородной кильватерной зоне корпуса, где уровень воды относительно низок даже при малых скоростях судна.
Другое преимущество новой силовой установки заключается в том, что вследствие большого диаметра ступицы промежуток А, на который отстоят подшипники 19а, 19b, удерживающие несущие устройства 18 лопаток, может быть широким, как показано на фиг.10а. Эти подшипники должны воспринимать весьма значительные осевые силы и моменты, обусловленные нагрузкой L от подъемной силы, создаваемой лопатками 16 гребных винтов, а также силами управления, создаваемыми на управляющем штоке 14. Устройство позволяет использовать игольчатые подшипники. Упорные подшипники 19с воспринимают меньшую центробежную нагрузку Рс. Кроме того, участки с создаваемой кавитацией имеют центр подъемной силы, который обычно находится несколько позади положения средней хорды. Лопатки могут быть расположены таким образом, что центр подъемной силы лежит на оси поворота лопаток. Получаемые усилия управления невелики, так что мощность системы управления сведена к минимуму.
В противоположность этому на фиг.10b представлена компоновка обычного гребного винта с изменяемым углом наклона лопаток, в случае которой несущее устройство 18 лопаток удерживается посредством комбинированного упорного и радиального подшипника скольжения 19. В этом случае радиальный подшипник воспринимает нагрузку L, обусловленную подъемной силой, и усилие управления на управляющем штоке 14, в то время как упорный подшипник воспринимает момент, создаваемый подъемной силой L, а также центробежной силой Рс. Очевидно, что уменьшенный промежуток А приводит к повышенным силам, получающимся вследствие высокого момента, создаваемого лопатками, и что это совместно со значительно более высокими силами трения приведет к получению сил управления, которые по меньшей мере представляют собой величину большего порядка, чем в случае новой системы движения. Это дополнительно усугубляется тем обстоятельством, что центр давления находится примерно на 25% места хорд, так что центр подъемной силы не может быть нормальным образом расположен на оси поворота. Значительные силы и свойственное для подшипников скольжения "залипание-скольжение" приводят к необходимости высокой мощности системы управления, причем со значительными гистерезисными явлениями.
Из-за того, что угол наклона можно контролировать оптимальным образом, выбор комплекта лопаток становится менее критичен, чем для гребного винта с фиксированным углом наклона. При этом изменение эксплуатационных характеристик между нагруженным и ненагруженным состоянием и т.д. значительно менее заметно. Это важный фактор, поскольку выбор гребного винта представляет собой серьезное искусство, а большинство лодок и кораблей, находящихся в эксплуатации, оснащено гребным винтами, которые далеки от оптимальных. Часто гребные винты должны быть выбраны на основе проб и ошибок. Кроме того, поскольку согласно изобретению углом наклона можно оптимально управлять, требуется лишь ограниченный диапазон заменяемых лопаток, чтобы охватить широкий диапазон их применения, что снижает затраты на складирование-хранение по сравнению с обычными гребными винтами.
Гребной винт также выполнен относительно большим по сравнению с известными гребными винтами для заданных размеров/типов судов. Например, для быстроходного (40 узлов) грузового судна водоизмещением 30000 т диаметр гребного винта (у концов лопаток) может приблизительно составлять 10,8 м при диаметре ступицы, приблизительно составляющем 4,3 м (и статической осадке корпуса, приблизительно равной 4 м). Диаметр обычного погруженного гребного винта для судов этого типа, как правило, составляет 8 м при диаметре ступицы порядка 1 м. Подобным же образом для тихоходного рыболовного судна, развивающего скорость порядка 35 узлов, гребной винт согласно изобретению может иметь диаметр, приблизительно составляющий 530 мм при диаметре ступицы порядка 195 мм (при статической осадке корпуса порядка 200 мм), в то время как обычные погруженные гребные винты для такого судна, как правило, имеют диаметр порядка 330 мм при диаметре ступицы порядка 90 мм. Для небольшого глиссера, имеющего малый вес, диаметр гребного винта согласно настоящему изобретению может составлять приблизительно 385 мм при диаметре ступицы порядка 192,5 мм (при статической осадке корпуса порядка 25 мм), в то время как диаметр обычного, пересекающего поверхность воды гребного винта для такого судна может составлять приблизительно 200 мм при диаметре ступицы 50 мм.
Для вышеупомянутых быстроходных грузовых судов закрутка лопаток у гребного винта согласно настоящему изобретению приблизительно может составлять 18,7o при отношении (S/C), которое увеличивается от 2,18 у корня лопаток до 5,17 у концов лопаток, с хордой (С), повышающейся до 75% длины лопаток и уменьшающейся к концевой части.
Для рыболовного судна, развивающего скорость 35 узлов, закрутка лопаток (гребного винта согласно изобретению) возможна до 25o, при этом отношение S/C увеличивается от 3,18 у корневой части, составляя 4,45 при 60% диаметра винта, до 8,75 у конечных частей лопаток, при этом вновь хорда (С) возрастает на 75% длины лопаток и уменьшается к конечной части. Для глиссера малого веса закрутка лопаток возможна приблизительно до 12,8o, отношение S/C увеличивается от 3,6 у корневой части, составляя 5,44 на 75% диаметра винта, до 6,99 у конечных частей лопаток.
Если гребной винт имеет большой диаметр и расположен вблизи от задней кромки судна, это означает, что часть зоны, ометаемой лопатками, остается над уровнем воды даже тогда, когда судно неподвижно или перемещается задним ходом, так что при таких условиях может сохраняться выходной кавитационный поток; таким образом гребные винты могут продолжать вращаться с максимальной скоростью даже при маневрировании в тесноте или при неподвижности. Этот сохраняемый кавитационый поток также снимает требование наличия привода со сцеплением. Лопатки могут удерживаться в нейтральном положении, при этом каждая лопатка работает в полости, создаваемой предыдущей лопаткой, что обеспечивает принудительное сохранение нейтрального положения.
Также могут быть обеспечены электронная/гидравлическая или электронная/электрическая системы управления, связанные с приемником системы определения местоположения (GPS), с тем, чтобы обеспечивать удержание судна в геостатическом положении.
Тот факт, что диаметр велик, также приводит к повышению зоны ометания по отношению к стандартному гребному винту, в то же время уменьшая осадку. Этот отличительный признак заметно уменьшает проскальзывание (а следовательно, повышает коэффициент полезного действия). Это особенно заметно в предпочтительном случае, при котором установлены два гребных винта. (При монтаже у транца на диаметр гребного винта налагаются незначительные физические ограничения).
Тот факт, что судно можно ускорять из состояния покоя с максимальной скоростью двигателя, когда гребной винт имеет большой диаметр, и то, что лопатки могут быть оптимально ориентированы для каких-либо конкретных условий, означает, что лопатки могут иметь малую хорду, а также и то, что коэффициент подъемной силы может сохраняться на умеренном уровне. Это позволяет устранить один из основных недостатков обычных гребных винтов, пересекающих поверхность воды, заключающийся в том, что промежуток между лопаткой и полостью за предыдущей лопаткой может быть относительно большим. Кроме того, тяга при низкой скорости необычайно высока по сравнению с другими силовыми установками и при умеренных скоростях (см. ниже), которые могут быть выдержаны для соответствия скорости движения по плоскости, тяга значительно выше, чем в других силовых установках. Это показано на фиг.11, на которой приведен график сравнения предполагаемых тяги и коэффициента полезного действия новой силовой установки (NPS), которая описана выше, и обычной гидрореактивной силовой установки.
Привод с бесступенчатым регулированием скорости вперед и назад, получаемый посредством механизма управления углом наклона лопаток, обеспечивает возможность весьма легкого маневрирования в порту, а при высокой скорости сопротивление значительно уменьшается из-за отсутствия рулей. Монтажная длина гребной установки, двигателя и привода может быть значительно меньше, чем при других системах движения, а также может быть уменьшен вес. Для быстроходных судов распределение нагрузки происходит идеально. Производственные затраты сопоставимы с затратами на обычные установки, содержащие
гребной винт и вал, и значительно меньше, чем в случае Z-образных приводов и водометных движителей.
Для содействия пониманию некоторых преимуществ вышеупомянутой силовой установки ниже со ссылками на фигуры 12-17 будут описаны некоторые проблемы обычных надводных приводных систем и обеспечивающие преимущества отличительные признаки согласно настоящему изобретению.
На фиг.12 и 13 показан пересекающий поверхность воды гребной винт обычного типа, при этом на них показан его участок, развернутый по плоскости на определенном диаметре. Лопатки имеют фиксированный угол наклона и наклонены к продольной оси винта под углом β,, причем они имеют хорду С, а промежуток между лопатками составляет S, и при этом отношение S/C составляет порядка единицы. В каждом случае представлены две полностью погруженные лопатки, при этом какие-либо частично погруженные или непогруженные лопатки на фигуре отсутствуют. Полость Са, создаваемая каждой лопаткой, имеет заднюю сторону, образуемую границей Са' пара/жидкости, формируемой там, где вода отделяется от передней кромки LE лопатки, и переднюю сторону, образуемую дополнительной границей Са'' пара/жидкости, формируемой там, где вода отделяется от эффективной задней кромки ТЕ1 лопатки.
Поверхность, проходящая от передней кромки LE к эффективной задней кромке ТЕ1 каждой погруженной лопатки, полностью смачивается, в то время как задняя сторона, проходящая от передней кромки LE к (фактической) задней кромке ТЕ2, каждой лопатки находится в контакте лишь с паровоздушной смесью в полости Са лопатки.
Распределение коэффициента давления Р вдоль смоченной поверхности LE-TE1 имеет острый пик Р1 у места застоя вблизи от передней кромки и, кроме того, более широкий пик Р2 вблизи от задней кромки. Распределение коэффициента давления, показанное на фиг.12 и 13, касается эффективной формы лопаток, в которой центр давления значительно смещен к эффективной задней кромке ТЕ1 лопатки. Менее эффективные формы лопаток демонстрируют менее резко выраженный второй пик Р2 или вообще могут не иметь второго пика. Va представляет собой осевую скорость по зоне, oметаемой лопатками, и составляет сумму скорости судна и скольжения (или дополнительной осевой скорости, создаваемой гребным винтом). U представляет собой разность между тангенциальной скоростью лопатки вследствие ее вращения и скоростью вихревого движения поступающей воды. Получаемая относительная скорость составляет V. Подъемная сила L и сопротивление D, создаваемые участком приращения размаха δН, могут быть выражены уравнениями:
L = ρw (V2/2) CLС δН;
D = L/(CL/CD),
где ρw - плотность воды; CL - местный коэффициент подъемной силы в трехразмерном пространстве; CL/CD отношение местного коэффициента подъемной силы к коэффициенту сопротивления; С - хорда лопатки.
Тяга Т, создаваемая этим участком приращения, и поглощаемая мощность W могут быть выражены уравнениями: Т = L sinβ - D cosβ; W = U [L sinβ + D cosβ].
На фиг.12 представлена работа гребного винта при высокой мощности и при относительно невысокой скорости судна, но после обеспечения полной вентиляции лопаток. В этом случае Va невысока, и если работа гребного винта не происходит при исключительно высоком угле атаки (приводящем к высокому потреблению мощности), U также должна быть мала, и таким образом получаемая относительная скорость V тоже мала. Для высокой мощности при низком значении U подъемная сила L должна быть высока, а поскольку V также мала, CL должен быть высок. Комбинированный эффект достигается в том, что кавитационное число σ будет высоко, а полость Са будет иметь весьма большую толщину. В этих условиях отношение подъемной силы к сопротивлению падает, так что лопатка создает значительное сопротивление.
Из фиг. 12 очевидно, что подъемная сила (представленная кривой Р коэффициента давления), создаваемая лопаткой 61, будет убывать вследствие того, что она действует в непосредственной близости от стенки Са' полости, а это приводит к деформации стенки. В результате происходит ослабление подъемной силы L, в то время как для постоянной входной мощности сопротивление D будет далее увеличиваться, приводя к значительному уменьшению тяги. Степень уменьшения подъемной силы и деформации стенки полости зависят от отношения местного потока Т текущей среды к толщине Т' полости. В условиях, когда лопатки относительно близко отстоят друг от друга, а полость является относительно толстой (как в обычных системах), снижение тяги вследствие вышеупомянутых условий может быть весьма значительным.
Влияние низкого значения U на крутящий момент двигателя и на создаваемую тягу в значительной степени зависит от расстояния между задней частью корпуса и гребным винтом. В том случае, когда гребной винт с фиксированным углом наклона лопаток, как на фиг.12, расположен непосредственно позади задней кромки 7 корпуса 3, корпус действует в качестве средства направления потока и подвод к гребному винту следует за продольным контуром корпуса. В этих условиях вихревая скорость входящего потока равна нулю и значение U определяет только скорость вращения гребного винта. Большая часть двигателей подводит мощность при низких скоростях, и в этом случае угол атаки будет увеличиваться до поглощения подводимой мощности двигателя. Двигатель будет работать, пока гребной винт обеспечивает небольшую тягу, и судно не сможет получить выигрыш в отношении скорости.
По этой причине большинство надводных приводов компонуется так, что гребной винт находится позади задней кромки 7 корпуса 3, например с гребным винтом, расположенным, скажем, по меньшей мере на 5-10% длины судна позади транца и/или на расстоянии позади транца, составляющем 35-180% диаметра гребного винта. При такой компоновке вода может образовывать вихри для обеспечения более быстрой работы гребного винта при заданном значении U. Это, в свою очередь, обеспечивает возможность подачи двигателем большей мощности, хотя даже в этом случае ускорение невелико и создаются значительные потери на вихреобразование.
На фиг. 13 показан тот же самый участок гребного винта при крейсерских скоростях. В этом случае угол атаки и коэффициент подъемной силы значительно уменьшены, a U, Va и V выше, так что кавитационное число σ значительно уменьшено и полость Са гораздо тоньше. Толщина Т потока текучей среды относительно толщины Т' полости в любой точке значительно понижена, так что уменьшение подъемной силы, деформации стенки Са' полости и получаемое повышение сопротивления также значительно понижены.
Вследствие пониженного кавитационного числа (σ) и угла атаки, а также искривления границы Са' полости под воздействием подъемной силы, создаваемой последующей лопаткой, толщины полости у задней кромки ТЕ2 и скорости в районе расчетной скорости, низкое кавитационное число и малый угол атаки приводят к получению тонкой полости с небольшим зазором между границей задней полости и задней кромкой лопатки. На некоторой скорости, которая несколько выше расчетной скорости, распределение давления на последующей лопатке будет искажать упомянутую границу полости, так что она повторно связывается с задней поверхностью лопатки (LE-ТЕ2), что приводит к разительному увеличению сопротивления. Этим объясняется быстрое падение коэффициента полезного действия на скорости, которая выше расчетной, в случае гребных винтов с фиксированным углом наклона лопаток.
Случай малой скорости для улучшенного гребного винта согласно настоящему изобретению показан на фиг.14. В представленном случае хорда С лопатки мала, а промежуток S весьма большой, так что отношение S/C может составлять 2,3 или более в зависимости от требуемых эксплуатационных характеристик. Лопатки наклонены под углом β, который значительно выше, чем в случае лопаток с фиксированным углом наклона, и при весьма низких скоростях может достигать 78-80o. Это позволяет сохранять высокую постоянную тангенциальную скорость U, так что относительная скорость V также высока, а вследствие этого подъемная сила L также может быть высока, если лопатка не работает при чрезмерных углах атаки с получением больших потерь. Это приводит к относительно низкому кавитационному числу σ и толщина полости остается невысокой. Тот факт, что последующая лопатка 62 теперь находится на некотором расстоянии позади предыдущей лопатки 61, обеспечивает изгиб полости под воздействием поля давления Р, создаваемого последующей лопаткой 62, при этом получаемое отношение толщины потока Т текучей среды к толщине Т' полости в любой точке значительно повышено по сравнению с тем случаем, который показан на фиг.17. Искажение кривой Р коэффициента давления и получаемые потери весьма существенно уменьшены. Гребной винт с такой конфигурацией для обеспечения преимуществ может быть расположен непосредственно позади задней кромки 7 корпуса 3 (с обеспечением улучшенных эксплуатационных характеристик по ранее указанным причинам), поскольку для совпадения потока с гребным винтом вихревая скорость не требуется.
В таком случае подъемная сила L высока, сопротивление D мало, а угол β приближается к 90o. Из приведенных выше уравнений потребляемой мощности и тяги будет очевидно, что такая компоновка позволяет довести до максимума тягу при данной мощности, а поскольку двигатель может быть установлен так, чтобы он работал с оптимальной скоростью, потребление полной мощности может происходить без вихреобразования и иных значительных потерь.
Случай высокой скорости для такого гребного винта показан на фиг.15, из которого очевидно, что распределение коэффициента давления Р будет подвержено незначительному влиянию полости позади предшествующей лопатки вследствие высокого отношения Т/Т'. Лопатка может действовать при высоком постоянном значении U, и угол β лопатки может быть доведен до оптимального, чтобы обеспечить оптимальную тягу при любых желаемых расчетных условиях. В случае поля давления последующей лопатки, действующего позади задней кромки предшествующей лопатки, в связи с тем, что угол лопатки можно регулировать для соответствия условиям потока, повторное присоединение верхней полости Са' к задней поверхности LE-TE2 лопатки может быть задержано, что позволяет получить более широкий рабочий диапазон.
На фиг.16 представлен принцип, используемый для получения нулевой тяги, при которой каждая лопатка действует в полости позади предыдущей лопатки. Хотя обеспечение 100% нейтрали требует применения активного средства управления, подсоединенного к системе определения местоположения (GPS) или к датчику тяги, тяга без потерь при небольших отклонениях каждой стороны положения уравновешенной тяги весьма мала вследствие близости толстой полости. Ввиду закрутки лопатки, показанной на фиг.17, внутреннее и наружное окончания лопатки будут создавать небольшие величины сбалансированной положительной и отрицательной тяги.
На фиг.18 представлены предсказуемые кривые коэффициента полезного действия силовой установки согласно настоящему изобретению и гребного винта известного типа с уводом лопаток (фиксированная геометрия), раскрытого в патенте США 3938463. Обе установки оптимизированы для получения максимальной скорости порядка 80 узлов. На фиг.18 представлено отношение двух коэффициентов полезного действия, которое ясно показывает, что, хотя максимальный коэффициент полезного действия новой установки на расчетной скорости на 8% выше, чем в случае гребного винта с уводом лопаток, при других скоростях разность гораздо более заметна. Для глиссеров практически важен коэффициент полезного действия на скорости глиссирования, и очевидно, что в данном случае гребной винт согласно патенту США 3938463 имеет коэффициент полезного действия, составляющий лишь 50% от коэффициента полезного действия новой силовой установки.
Весьма существенное повышение коэффициента полезного действия высокоскоростных судов, обеспечиваемое силовыми установками согласно описанным выше вариантам осуществления изобретения, позволяет устанавливать значительно меньшие (или более легкие) двигатели для получения тех же самых эксплуатационных характеристик. Значительная экономия потребляемого топлива дополнительно снижает вес судна, а также позволяет снизить расходы на монтаж и эксплуатационные расходы. Простота устройства позволяет свести к минимуму техническое обслуживание и повысить надежность. В большинстве случаев лопатки могут быть по отдельности заменены и гребной винт может быть повернут таким образом, что эта операция может быть выполнена над уровнем воды. Это особенно важно для больших коммерческих судов, в случае которых работы с гребным винтом обычно выполняют в сухом доке, и поскольку для изготовления нового гребного винта требуется время, часто на борту держат резервный гребной винт.
Кроме того, будучи "затененной" корпусом, ступица гребного винта может иметь диаметр, который предельно уменьшен по сравнению с ее теоретическим диаметром, так что какое-либо изменение формы ступицы при повороте лопатки имеет небольшое значение.
Можно оценить, что легкость изменения угла наклона лопаток для достижения максимальной тяги, когда это требуется, или максимального рабочего коэффициента полезного действия и т.д. представляет собой важный аспект предпочтительного варианта осуществления изобретения. Далее следует подробное описание имеющего развитую логику регулятора для управления трансмиссией, приемлемого для использования в силовой установке согласно изобретению, чтобы выполнять логическое управление углом наклона лопаток. Последующее описание будет дано со ссылками на фиг.20-27.
На фиг.20 схематически представлена система управления для судна с двумя дизельными двигателями, при этом каждый двигатель обеспечивает приведение в действие одной роторной гребной установки, причем на фиг.20 представлена система управления только для одного двигателя и для одной гребной установки (для ясности). Вращение двух гребных установок происходит в противоположном направлении. Угол наклона лопаток каждой гребной установки изменяется посредством исполнительного электрического механизма с имеющимся устройством обратной связи. Управление дросселированием двигателя осуществляется исполнительными механизмами с положительной обратной связью. Управление каждым двигателем, обеспечивающее переменную скорость, осуществляется независимым образом.
Переменные:
q - основное положение управления дросселем;
u - вспомогательное положение управления дросселем;
s - положение дросселя двигателя;
р - углы наклона лопаток винта;
r(s) - измеренные скорости двигателя;
rd(s) - управляемые скорости двигателя;
rm(s) - скорость двигателя при максимальной мощности для S;
r' - ускорение двигателя (dr/dt);
W(s) - максимальная мощность на выходе при r(s);
Wmax, r(Wmax) - максимальная мощность, скорость двигателя при максимальной мощности;
dir = ± 1 - движение вперед и назад;
±φ - угол отклонения рулевого колеса от прямого курса вперед;
V - скорость судна.
Приведенные выше переменные использованы на фиг.19-26.
ФУНКЦИОНИРОВАНИЕ
Способ управления
Устройство управления трансмиссией работает тремя основными способами управления.
1. Управление при зависимости скорости двигателя и скорости судна
В этом случае управление скоростью судна и двигателя, ускорением, движением вперед и назад, а также нагрузкой двигателя осуществляется посредством использования устройств управления дросселем двигателя.
2. Независимое управление скоростью двигателя и скоростью судна
При этом способе задают некоторое желательное значение скорости двигателя, используя отдельное устройство управления дросселем. Управление скоростью судна, ускорением и направлением, а также потенциальной перегрузкой двигателя осуществляют путем изменения угла наклона лопаток гребных установок. Типичными примерами этого способа управления может служить следующее:
2.1 При маневрировании в порту может быть установлено некоторое значение скорости двигателя, при котором можно получить достаточную мощность для всех ожидаемых маневров;
2.2 В условиях крейсерского движения может быть установлено некоторое оптимальное значение скорости двигателя в отношении потребления топлива или для того, чтобы отвечать определенным критериям, касающимся шума и вибрации.
2.3 Для мощных катеров может быть выбрана скорость двигателя при максимальной мощности, чтобы в любое время можно было обеспечить максимальное ускорение.
3. Смешанное управление
При способе 2, если выбрано значение угла наклона лопаток, которое приводит к перегрузке двигателей, угол наклона уменьшают для предотвращения перегрузки. При смешанном управлении в этом случае скорость двигателя может быть увеличена.
Система управления имеет регулятор с одним рычагом, который при способе 1 задает настройки дросселей двух двигателей (а вследствие этого задает скорости двигателей и угол наклона лопаток гребного устройства) и направление (вперед и назад).
При способах 2 и 3 отдельное устройство управления дросселем двигателя задает положение дросселя, а управляющее устройство с одним рычагом управляет углом наклона лопаток и направлением (вперед или назад). При третьем способе, если управляющий рычаг установлен таким образом, что скорости двигателей должны быть выше скоростей, задаваемых дросселем двигателей, то управляющее устройство с одним рычагом также осуществляет управление скоростью двигателя.
Управление дросселем
Дроссельное устройство, q, управляет входом (заслонкой карбюратора, рейкой насоса дизеля или электронным вводом) двигателя, s, согласно выражению:
s = f(q),
где f представляет собой некоторую желаемую функцию.
Возможная функция, представленная на фиг.21, может быть выражена так:
s = max(Smin|q|)
При s происходит оптимальное управление двигателем для работы на расчетной скорости rd и обеспечивается максимальная мощность Wmax при скорости двигателя порядка rm. В зависимости от рабочих условий может потребоваться более одной кривой "rd от s" для максимального использования получаемой мощности с сохранением достаточного резерва по динамике или для доведения до максимума коэффициента полезного действия при разных нагрузках и разном состоянии моря.
Двигатель обеспечивает максимальную мощность W при скорости порядка rm. График сравнения rm(s), W(s) и rd(s) представлен на фиг.22.
Для управления скоростью двигателя по контролируемому значению rd разность между измеренной скоростью r и контролируемой скоростью подводится к устройству управления углом наклона лопаток (как показано на фиг.20). Если двигатель вращается слишком быстро, угол наклона увеличивается, нагружая двигатель и вызывая его замедление. Если скорость двигателя весьма мала, угол наклона уменьшается, понижая нагрузку двигателя и обеспечивая повышение скорости двигателя.
В том случае, когда возможно независимое управление скоростью двигателя и судна, скорость двигателя задают как функцию вспомогательного дросселирования u: rd=rd[f(u)]. Затем основное дросселирование понижает или увеличивает положение дросселя двигателя, обеспечивая уменьшение или увеличение угла наклона лопаток движителя с сохранением постоянной скорости rd двигателя.
Чтобы изменить мощность при постоянной скорости двигателя необходимы данные зависимости дросселирования от устанавливаемой мощности при постоянной скорости. Они имеют форму группы кривых, которые легко могут быть получены из данных, которыми располагает изготовитель двигателей. Также должны оценить изменение потребляемой мощности, связанное с изменениями углов наклона лопаток гребного движителя. Эти характеристики хранятся в устройстве для оценки дросселирования и угла наклона лопаток (см. фиг.20). Поскольку какие-либо ошибки корректируются обратной связью скорости двигателя - угла наклона лопаток, большая точность не требуется и достаточен ряд величин при номинальных расчетных условиях (rd, s).
Максимальная скорость двигателя ограничена быстрым уменьшением настройки дросселирования, если превышена определенная скорость rmах. Это схематически представлено на фиг.23. Задается высокая степень k понижения дросселирования. Если контролируемая скорость rd двигателя падает ниже скорости rm при максимальной мощности в каком-либо положении s дросселя, будет происходить потеря скорости двигателя. Поэтому используется устройство для ограничения потери скорости, представленное на фиг.24, чтобы ограничить угол наклона лопаток максимальным значением, определяемым rm и r, и избежать потерь скорости.
Дроссель Si также необходимо удерживать в его рабочем диапазоне, который контролируется на выходе ограничителя дросселирования. Ограничение может происходить только при повороте, так что остаточное дросселирование Δsij (разность между расчетным и ограниченным дросселированием) подводится к другому двигателю для сохранения способности поворота (ценой скорости движения вперед). (Индекс i относится к системе с двигателем, представленной на фиг. 20, в то время как индекс j относится к другой системе с двумя двигателями). Устройство для дросселирования и ограничитель дросселирования схематически представлены на фигурах соответственно 25 и 26.
Управление скоростью двигателя с использованием угла наклона лопаток предназначено для обеспечения хорошей ступенчатой реакции на изменение дросселирования. Реакция на дросселирование, получаемая от двигателя, и характеристики гребного движителя обеспечивают ускорение судна с возможностью изменения при этом скорости двигателя.
Максимальное линейное ускорение может быть ограничено путем введения в систему управления замера или оценки ускорения.
Рулевое управление (Фиг.27)
Для рулевого управления судном мощность, подводимая к внутреннему движителю, должна быть уменьшена по отношению к мощности, подводимой к наружному движителю. Это обеспечивается посредством изменения скорости наружного двигателя по отношению к внутреннему двигателю или посредством увеличения наклона лопаток наружного движителя с понижением угла наклона лопаток внутреннего движителя, либо посредством сочетания изменений скорости двигателя и угла наклона лопаток.
В том случае, если индексы 1 и 2 относятся соответственно к внутреннему и наружному движителям, достаточно добавить приращения настройки дросселирования ΔS1, ΔS2 к введенным настройкам дросселирования S и добавить Δр1 и Δр2 к введенным настройкам угла наклона лопаток, чтобы измененная мощность двигателя поглощалась мощностью, расходуемой каждым движителем, а скорость двигателя оставалась бы при этом постоянной.
s1 = |s-Δs1|,
s2 = |s-Δs2|,
p1 = |p-Δp1|,
p2 = |p-Δp2|,
где
Δs = Fs(φ,r),
Δp = Fp(s,Δs),
и где Fs, Fp представляют сбой функции характеристик двигателя и движителя.
В большинстве случаев при пониженных скоростях Δs1 ≈Δs2, тогда как при повышенных скоростях Δs1>Δs2 вследствие нелинейностей кривой мощности двигателя. При низких скоростях выражение(s - Δs1) может оказаться отрицательным, что является нереальным состоянием. В этих условиях знак у dir будет изменен, что приводит к изменению угла наклона лопаток, следствием чего является отрицательная тяга. Значение s1 = |s-Δs1| остается положительным.
Угловая скорость рыскания может быть ограничена путем введения в цепь управления измерения или оценки ускорения.
Управление режимами
Помимо описанных выше основных способов, используются следующие способы:
1. Управление при чрезвычайных обстоятельствах
Система управления включает в себя максимальную линейность и обеспечивает ускорение при рыскании для комфорта пассажиров. Этим ограничивается необходимость блокирования автоматической системы в случае чрезвычайных маневров.
2. Управление скоростью судна
Выбирают требуемую скорость судна. Ошибку между измеренной скоростью судна и выбранной скоростью подают к устройству управления двигателем для сохранения требуемой скорости судна.
3. Управление динамической стабилизацией
Обеспечивается управление скоростью судна и курсом.
На случай полного выхода из строя устройства управления двигателем или движителем могут быть обеспечены механические управляющие устройства для непосредственного управления положениями дроссельного устройства двигателя или углом наклона лопаток движителя. В случае выхода из строя двигателя или движителя для сохранения курса необходимо использовать аварийный руль. В этом случае один оставшийся двигатель или движитель обеспечивает только управление скоростью вперед и назад.
Система управления
Как отмечено выше, на фиг.20 показана система управления только для одного двигателя и одного движителя. Сигнал ΔAS12 остаточного дросселирования от ограничителя дросселирования подают к добавителю ΔS2 сигнала устройства управления противоположным двигателем, а сигнал ΔS21 представляет собой сигнал, возвращаемый от противоположного ограничителя дросселирования к показанному добавителю ΔS1 сигнала.
Можно будет оценить, что без отклонения от объема изобретения возможны различные модификации описанных выше вариантов осуществления конструкции. Например, в некоторых случаях отношение S/C промежутка между лопатками к хорде лопаток может составлять менее 2,0 вдоль небольшой части длины каждой лопатки. В некоторых случаях до 10% длины лопаток может иметь отношение S/C, составляющее менее 2,0. Например, в одном из возможных вариантов отношение (S/C) составляет менее 2,0, предпочтительно находясь в диапазоне 1,7-2,0 у корневой части лопаток. Это, в частности, будет иметь место в случае, когда конструкция предназначена для использования на относительно тяжелых полуглиссирующих судах. Можно оценить, что в случае такого судна для обеспечения желательной скорости крейсирования другие ограничительные факторы, такие как размер транца корпуса и желаемая площадь потока через гребной винт, могут означать, что выбранное отношение S/C в общем должно быть меньше отношения S/C, которое должно быть использовано для гребного винта, предназначенного для судна с высокой скоростью глиссирования.
Для судов с высокой скоростью глиссирования отношение S/C в общем всегда будет составлять по меньшей мере 2,0 на 95% или более длины лопаток.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРПУС БЫСТРОХОДНОГО СУДНА | 2000 |
|
RU2238871C2 |
| КОРПУС ГЛИССИРУЮЩЕГО ИЛИ ПОЛУГЛИССИРУЮЩЕГО СУДНА | 2000 |
|
RU2239579C2 |
| СУДОВОЙ ДВИГАТЕЛЬ С ГОНДОЛОЙ, УСТАНАВЛИВАЕМОЙ ПОД КОРПУСОМ СУДНА | 2005 |
|
RU2372246C2 |
| Движительный комплекс надводного судна с подвесным двигателем | 2021 |
|
RU2758525C1 |
| ГРЕБНОЙ ВИНТ КОНСТРУКЦИИ КАЛАШНИКОВА | 2010 |
|
RU2452653C2 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| СУДОВАЯ ТУННЕЛЬНАЯ ВИНТОВАЯ ВОДОМЕТНАЯ ДВИЖИТЕЛЬНАЯ СИСТЕМА | 2014 |
|
RU2666983C2 |
| ДВИЖИТЕЛЬНАЯ УСТАНОВКА | 2015 |
|
RU2629812C1 |
| АМФИБИЯ | 2007 |
|
RU2520665C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |











Силовая установка для плавучих судов содержит по меньшей мере один вал, который проходит в заднем направлении от транца корпуса судна. Силовая установка включает в себя гребной винт, пересекающий поверхность воды. Гребной винт установлен на упомянутом по меньшей мере одном валу вблизи от задней кромки корпуса судна. При использовании судна гребной винт работает в плоскости, созданной позади транца корпуса. Силовая установка имеет приводные средства для приведения в движение по меньшей мере одного вала. Упомянутый гребной винт содержит ступицу и большое количество лопаток, отстоящих вокруг нее друг от друга в угловом направлении фактически на равном расстоянии, при этом отношение промежутка между лопатками к хорде лопаток составляет по меньшей мере 2,0 фактически по всей длине лопаток. При силовой установке торцевой профиль корпуса судна содержит по меньшей мере один выступ, в общем имеющий дугообразный профиль, который в общем соответствует профилю ступицы гребного винта или каждого гребного винта. Технический результат реализации изобретения заключается в обеспечении высокого коэффициента полезного действия силовой судовой установки. 24 з.п.ф-лы, 27 ил.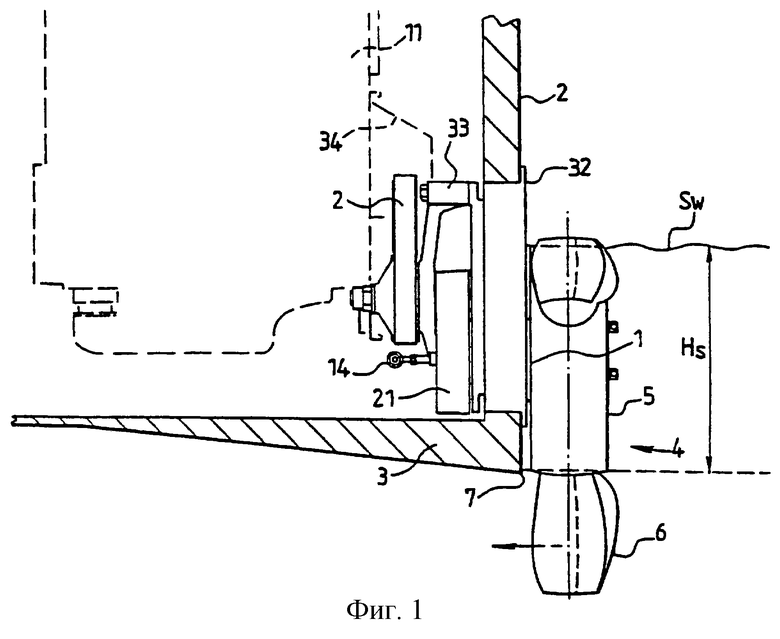
| US 3709187 А, 09.01.1973 | |||
| НЕСЪЕМНАЯ ОПАЛУБКА, СПОСОБ ЕЕ СБОРКИ И СПОСОБ ВОЗВЕДЕНИЯ МОНОЛИТНЫХ СТЕН И СООРУЖЕНИЙ В НЕСЪЕМНОЙ ОПАЛУБКЕ | 2003 |
|
RU2248433C1 |
| УСТАНОВКА ДЛЯ СУШКИ СЫПУЧИХ МАТЕРИАЛОВ | 1992 |
|
RU2027132C1 |
| Гребной винт с частично погруженными лопастями | 1961 |
|
SU146200A1 |

