Область техники, к которой относится изобретение
Настоящее изобретение относится к судовому движительному комплексу, содержащему, по меньшей мере, одну гондолу, механически связанную с несущей стойкой, выполненной с возможностью установки под корпусом судна, гребной винт, расположенный позади гондолы, имеющий, по меньшей мере, две лопасти и приводимый во вращение трансмиссионным валом, связанным с двигателем, систему, по меньшей мере, трех направляющих лопаток, прикрепленных к гондоле, причем система образует венец, по существу перпендикулярный продольной оси гондолы.
Более конкретно, изобретение относится к компактному движительному комплексу типа поворотной гондолы или POD (ориентируемый пропульсивный привод), в котором предусмотрена несущая стойка, устанавливаемая с возможностью поворота под корпусом судна. Части гондолы, называемые «передней» и «задней», определены по отношению к носу и корме судна, то есть передняя часть гондолы обращена к носу, по меньшей мере, когда движительный комплекс обеспечивает передний ход судна.
Уровень техники
В большинстве движительных комплексов типа поворотной гондолы, например в комплексе по патентному документу WO 9914113, гребной винт расположен на переднем конце гондолы, в отличие от движительного комплекса по изобретению.
В общем случае традиционные судовые движительные комплексы типа поворотной гондолы не предназначены для работы в кильватерной струе судна, поэтому они имеют достаточно высокие несущие стойки, чтобы гребной винт был расположен за граничным слоем кильватерной струи. Соответственно, эти движительные комплексы обычно довольно громоздки уже из-за необходимого большого расстояния между корпусом судна и гребным винтом. Кроме того, такие движительные комплексы обычно подвержены явлениям вибрации и кавитации, при этом кавитация создается, в частности, при поворотном движении комплекса. Кавитация - это явление, при котором образуются лопающиеся пузырьки водяного пара на концах лопастей гребного винта. В морской гидродинамике кавитация ухудшает характеристики движительной системы, вызывает вибрацию, провоцирует эрозию вращающихся частей и является источником шума, нарушающим акустическую скрытность судна.
Из уровня техники, например патентного документа ЕР 1270404, известны решения движительных комплексов описанного типа, в которых гребной винт вспомогательного движителя типа компактной поворотной гондолы расположен в задней части гондолы. Кроме того, этот гребной винт предназначен для работы в кильватерной струе другого гребного винта, называемого «основным гребным винтом». Этот основной гребной винт предназначен для обеспечения основной пропульсивной мощности и приводится, например, от дизельного двигателя, установленного внутри судна. Что касается гребного винта вспомогательного движителя, он предусмотрен для создания либо дополнительной пропульсивной мощности, либо мощности управления поворотом судна, если этот движитель установлен с возможностью поворота. В зависимости от варианта выполнения системы направляющих лопаток вокруг гондолы эта система расположена либо перед гондолой, либо сдвинута назад, но только до уровня центральной части несущей стойки. Задачей направляющих лопаток является повышение кпд движителя за счет повторного использования осевой компоненты энергии вращения вихревого потока, создаваемого основным гребным винтом, так что они должны быть расположены относительно близко к основному гребному винту.
Несмотря на компактность такого поворотного пропульсивного движителя общий движительный комплекс, включающий основной гребной винт, остается громоздким и требует относительно большой осадки корпуса, как и традиционные движительные комплексы типа поворотной гондолы.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в снижении по сравнению с известными решениями осадки корпуса судна, оснащенного, по меньшей мере, одним движителем с гребным винтом, установленным на гондоле. Для этого в соответствии с изобретением предусмотрен движительный комплекс, в частности компактный комплекс типа ориентируемого пропульсивного привода, который может быть установлен ближе к корпусу судна. Для повышения вертикальной компактности движительного комплекса изобретением предусмотрено уменьшение высоты несущей стойки гондолы для максимального приближения гребного винта к корпусу с предотвращением явления кавитации. И наконец, задачей изобретения является повышение кпд движительного комплекса и снижение его стоимости, по меньшей мере, в части привода.
В соответствии с изобретением решение поставленных задач обеспечивается созданием компактного движительного комплекса, который работает по принципу осевого или винтового насоса, то есть обеспечивает продвижение судна за счет принудительного перемещения воды через насадку. Принцип винтового насоса восходит к реактивным двигателям самолета, по меньшей мере в отношении управления входным потоком, и в нем используется система противотока для устранения явлений кавитации. Винтовой насос работает на пропускание жидкости, в то время как классический гребной винт работает на отталкивание жидкости. Следует отметить, что сам по себе принцип продвижения с помощью винтового насоса используется с давних пор в системах подводных лодок, а расположение винтового насоса в кильватерной струе подводной лодки позволяет получать высокий кпд движителя при снижении акустических помех. Известно также, например, из патентного документа США 4600394, использование винтовых насосов на небольших лодках с подвесными и бортовыми двигателями.
Разумеется, для получения винтового насоса недостаточно окружить классический гребной винт обтекаемой конструкцией в виде насадки. Как хорошо известно из уровня техники, например, из патентного документа США №6062925, движущая сила гребного винта, установленного на гондоле, может быть повышена на низкой скорости путем установки окружающего гребной винт обтекателя в виде насадки. Сама эта установка как таковая не позволяет получить винтовой насос, так как форма лопастей в винтовом насосе специфична для этой технологии и значительно отличается от форм лопастей классических гребных винтов.
И наконец, из патентного документа DE 10158320 известен судовой движительный комплекс типа POD с винтовым насосом, ротор (рабочее колесо) которого окружает статор электродвигателя насоса. Таким образом, двигатель полностью окружен насадкой насоса, которая прикреплена к несущей стойке движительного комплекса типа POD. При такой конструкции диаметр гребного винта в виде ротора вынужденно увеличивается с увеличением размеров и мощности двигателя. Для электродвигателя большой мощности (например, порядка 10 МВт) при проектировании гребного винта в виде ротора насадка должна иметь относительно большой диаметр для создания достаточного проходного сечения для расхода воды в насосе.
Результатом такого решения является относительно высокое гидродинамическое сопротивление движительному комплексу и весьма низкий кпд движителя, что составляет основной недостаток. С другой стороны, очевидно, что обеспечить охлаждение электродвигателя большой мощности в данном случае труднее, чем в обычном движительном комплексе типа POD, двигатель которого установлен в гондоле на расстоянии от гребного винта. В этом обычном движительном комплексе охлаждение двигателя производится принудительной циркуляцией воздуха, подаваемого в гондолу от судна через несущую стойку.
Таким образом, хотя такой движительный комплекс типа POD с винтовым насосом позволяет решить некоторые задачи, поставленные данным изобретением, в частности устранить явления кавитации, он не обеспечивает большой мощности движительного комплекса, который был бы относительно компактен по диаметру и обладал бы кпд, по меньшей мере, равным кпд обычного движительного комплекса типа POD такой же мощности. Настоящее изобретение предусматривает также устранение недостатков такого движительного комплекса типа POD с винтовым насосом.
В соответствии с изобретением движительный комплекс, охарактеризованный в приведенном выше описании, отличается тем, что содержит насадку, которая, по меньшей мере, частично окружает гребной винт и венец направляющих лопаток, причем каждая лопасть имеет оконечность с кромкой, подходящей вплотную к внутренней стенке насадки, так что гребной винт образует ротор винтового насоса, а венец направляющих лопаток размещен в зоне, расположенной между центральной частью несущей стойки и гребным винтом.
Система, образованная направляющими лопатками и насадкой, является статором винтового насоса. Этот винтовой насос вращается обычно на 50-100% быстрее классического гребного винта эквивалентной мощности. Это позволяет снизить на 50-100% крутящий момент приводного двигателя гребного винта и, соответственно, снизить на 20-40% диаметр двигателя (электродвигателя) по сравнению с обычным движительным комплексом типа POD. В движительном комплексе по изобретению снижение диаметра двигателя позволяет снизить диаметр гондолы и массу комплекса для вариантов выполнения с размещением двигателя в гондоле. Снижение диаметра гондолы позволяет уменьшить гидродинамическое сопротивление движительному комплексу, то есть повысить его кпд.
С другой стороны, двигатель и основной объем гондолы расположены перед винтовым насосом по направлению потока воды. Это дает возможность выполнить гребной винт с относительно компактной ступицей и получить достаточную площадь сечения для ротора (гребного винта) насоса без необходимости чрезмерного увеличения диаметра насадки, что вызвало бы ухудшение параметров гидродинамического потока. В типовом случае движительный комплекс по изобретению с электродвигателем мощностью свыше 10 МВт, размещенным в гондоле, может быть выполнен с насадкой, имеющей внутренний диаметр, по существу равный диаметру гребного винта, порядка удвоенного диаметра гондолы. Это позволяет получить достаточное сечение для гребного винта для обеспечения адекватного расхода воды в насосе и относительно низкое гидродинамическое сопротивление для движительного комплекса по сравнению с устройством по патентному документу DE 10158320.
И наконец, возможность работы винтового насоса в кильватерной струе судна без возникновения кавитации позволяет уменьшить высоту несущей стойки, что также способствует компактности комплекса. Действительно, винтовой насос может быть приближен к корпусу судна, поскольку он не передает на судно колебаний давления, вызывающих вибрацию. Это объясняется, во-первых, тем фактом, что поток воды обеспечивается статором винтового насоса, что позволяет достичь постоянную скорость поступающей на ротор воды в полости, отделяющей ротор от статора. Соответственно, остаточные колебания давления, создаваемые винтовым насосом, относительно невелики. С другой стороны, эти остаточные колебания давления гасятся на уровне насадки насоса, и их отражение от корпуса судна достаточно слабо для того, чтобы не вызывать вибрацию на борту судна.
В результате может быть уменьшена осадка корпуса судна, по сравнению с судами, имеющими обычный движительный комплекс типа POD, что дает большую гибкость в выполнении кормы судна. Кроме того, факт расположения винтового насоса внутри от граничного слоя кильватерной струи судна позволяет повысить кпд движителя по сравнению с расположением винтового насоса снаружи от этого граничного слоя. Действительно, внутри от граничного слоя скорость воды на входе в винтовой насос ниже по сравнению с этой скоростью при расположении насоса снаружи от граничного слоя, что увеличивает разность между скоростями, соответственно, на выходе насадки и на входе в насос, тем самым увеличивая создаваемую ротором насоса тягу. Следует отметить, что толщина граничного слоя увеличивается с увеличением скорости и размеров судна. На крейсерской скорости судна кильватерная струя является более мощной, так что кпд движителя повышается по сравнению с более низкими скоростями.
В компактном движительном комплексе по изобретению направляющие лопатки служат элементами направления потока для винтового насоса. Система направляющих лопаток в виде венца размещена в зоне, расположенной в продольном направлении позади центральной части несущей стойки для того, чтобы быть достаточно близко к гребному винту. В данном контексте центральная часть несущей стойки определяется как часть, которая содержит полость, сообщающуюся с внутренним пространством корпуса судна.
Движительный комплекс по изобретению предназначен в особенности для судна, в котором предусмотрена несущая стойка гондолы, устанавливаемая с возможностью поворота под корпусом судна для обеспечения движительного комплекса типа ориентируемого пропульсивного привода. В судне, оснащенном несколькими такими движительными комплексами, возможно наличие, по меньшей мере, одного комплекса типа ориентируемого пропульсивного привода, который может поворачиваться на 360° и расположен в кормовой части судна в его кильватерной струе. Такое решение обеспечивает управление курсом судна и, дополнительно, торможение тягой без реверса вращения ротора движительного комплекса.
Краткое описание чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения, его особенности и преимущества. На чертежах:
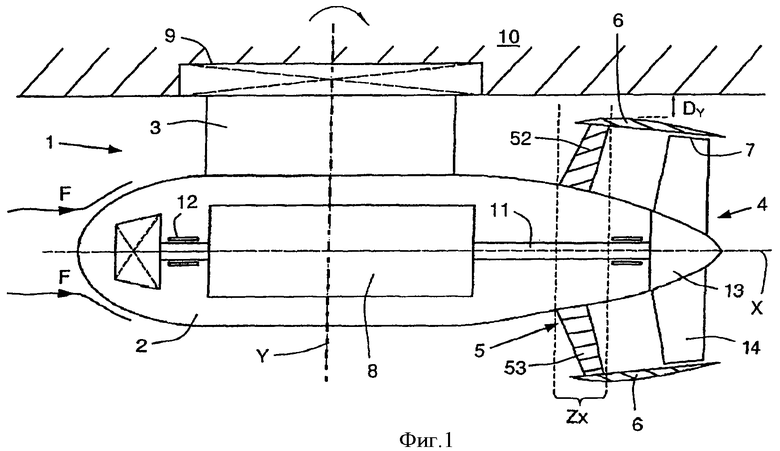
фиг.1 схематично изображает движительный комплекс типа POD на виде в продольном разрезе в вертикальной плоскости продольной оси гондолы,
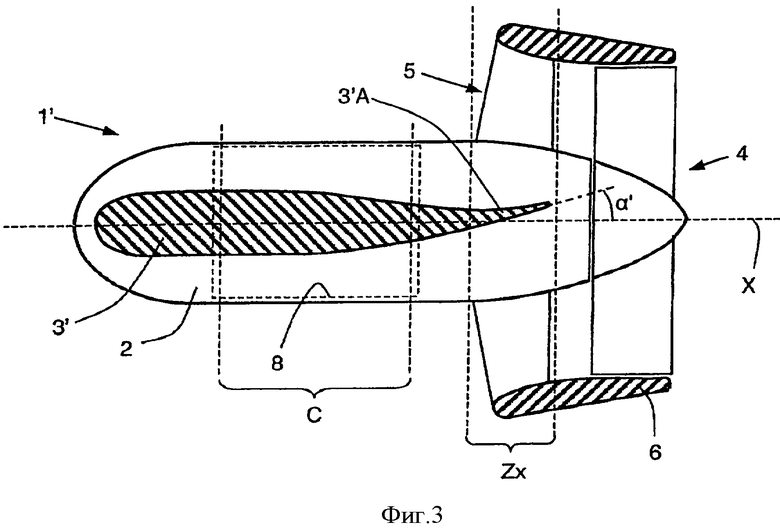
фиг.2 схематично изображает движительный комплекс по фиг.1 в перспективе,
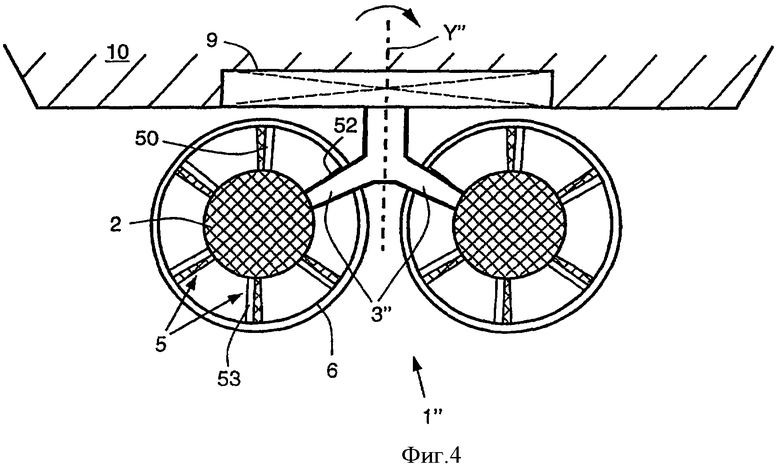
фиг.3 схематично изображает на виде сверху движительный комплекс в другом примере выполнения, в котором задний конец несущей стойки образует направляющую лопатку.
фиг.4 схематично изображает на виде спереди движительный комплекс типа поворотной гондолы в другом примере выполнения с двумя идентичными движителями, расположенными рядом друг с другом.
Осуществление изобретения
На фиг.1 движительный комплекс 1 показан в продольном разрезе в плоскости, образованной продольной осью Х гондолы 2 и осью Y поворота комплекса 1. Комплекс 1 установлен под корпусом 10 судна, причем гондола 2 традиционным образом связана с несущей стойкой 3, которая установлена с возможностью поворота в уплотненной подшипниковой опоре 9, проходящей через корпус судна. В предпочтительном примере выполнения гондола 2 выполнена по размерам такой, что вмещает в себя электродвигатель 8, ротор которого (не показан) вращает приводной вал 11 гребного винта 4. Вал 11 установлен на оси Х с помощью подшипников 12. Известным образом гондола 2 и несущая стойка 3 выполнены обтекаемыми для оптимизации гидродинамических потоков воды, представленных стрелками F.
Как известно из уровня техники, может быть предусмотрено другое исполнение, в котором двигатель расположен внутри корпуса судна, и в этом случае предусмотрена угловая механическая трансмиссия для передачи вращения от двигателя на приводной вал гребного винта. Кроме того, в движительном комплексе по изобретению отсутствует необходимость в том, чтобы несущая стойка гондолы была установлена с возможностью поворота относительно корпуса судна. В случае выполнения с жестким креплением несущей стойки может быть предусмотрена, по меньшей мере, еще одна стойка с жестким креплением для прямой связи насадки с корпусом и усиления механической связи между движительным комплексом и корпусом. Эта вторая стойка может иметь меньшие размеры, так как насадка предпочтительно расположена очень близко к корпусу. В этом случае управление курсом судна может обеспечиваться с помощью специальных средств управления, не связанных с движительным комплексом, или же по принципу, раскрытому в патентном документе ЕР 1270404, где предусмотрен дополнительный устанавливаемый под углом движительный комплекс типа поворотной гондолы или ориентируемого пропульсивного привода.
В примере выполнения по фиг.1 предусмотрена уплотненная подшипниковая опора 9, которая допускает поворот несущей стойки 3 для выполнения функции управления судном. Может быть предусмотрен поворот на угол до 180° относительно нормального положения хода, показанного на чертеже, для обеспечения режима «торможения» тягой, противоположной движению судна. Однако такой режим «торможения» может быть получен также и при неповоротной или поворачиваемой на небольшой угол несущей стойке 3 путем создания тяги заднего хода реверсом вращения гребного винта 4.
Для формирования винтового насоса движительный комплекс содержит систему направляющих лопаток 52, 53, прикрепленных к гондоле 2. Эта система направляющих лопаток образует венец 5, по существу перпендикулярный оси Х гондолы и размещенный в зоне Zx, расположенной в продольном направлении между несущей стойкой 3 и гребным винтом 4. В общем случае в движительном комплексе по изобретению зона Zx находится между центральной частью несущей стойки и гребным винтом, как это будет объяснено далее со ссылкой на фиг.3. Предпочтительно венец 5 образован, по меньшей мере, пятью лопатками, а гребной винт содержит, по меньшей мере, три лопасти 14. Эти направляющие лопатки должны быть расположены достаточно близко к гребному винту для ориентации линий водяного потока в соответствующем направлении при его приближении к гребному винту. Лопатки не обязательно должны быть идентичными.
Насадка 6 окружает гребной винт 4 и венец 5 направляющих лопаток. Как будет описано далее со ссылкой на фиг.2, входной профиль насадки 6 и ориентация каждой направляющей лопатки предпочтительно скоординированы с картой кильватерной струи судна на его крейсерской скорости. Следует заметить, что насадка вносит вклад в создание общей тяги за счет собственной подъемной силы. Гребной винт содержит вращаемую совместно с валом 11 ступицу 13 с укрепленными на ней лопастями 14. Каждая лопасть 14 имеет оконечность с кромкой 7, подходящей вплотную к внутренней стенке насадки. Таким образом, венец 5 и насадка 6 образуют статор винтового насоса, а гребной винт 4 является ротором насоса.
Предпочтительно насадка 6 имеет сечение, которое постепенно уменьшается к задней части, и профили схождения или расхождения, заданные как функция крейсерской скорости судна для повышения кпд движителя. Кроме того, известным образом направляющие лопатки имеют скошенный профиль для снижения их гидродинамического сопротивления. В результате, как видно на фиг.1, нет необходимости в том, чтобы передняя часть насадки перекрывала всю длину зоны Zx расположения венца 5. Передний край этой зоны показан пунктирной линией и проходит в той же точке оси Х абсцисс, что и передние края направляющих лопаток. Само собой разумеется, что направляющие лопатки могут иметь еще более скошенный профиль с более значительным увеличением длины зоны Zx венца 5 направляющих лопаток.
По меньшей мере, три направляющие лопатки, предпочтительно, все направляющие лопатки венца 5 используются для надежного крепления насадки 6 к гондоле 2. Ось симметрии насадки по существу совпадает с продольной осью Х гондолы, что позволяет обеспечить небольшой зазор между кромками 7 оконечностей лопастей 14 гребного винта и внутренней стенкой насадки. В примере выполнения по фиг.1 все лопасти 14 идентичны, а наружная кромка 7 лопасти, подходящая вплотную к насадке, выполнена с двумя острыми углами, чтобы увеличить до максимума длину криволинейной кромки, подходящей вплотную к насадке, по отношению к общей длине периферии лопасти. Известно, что такая угловая форма наружных кромок лопастей обладает преимуществами в технологии винтовых насосов. Ротор насоса, образованный гребным винтом 4, содержит, по меньшей мере, две лопасти 14. Моделирование вычислительным методом показывает, что ротор с одиночной винтовой лопастью в соответствии с решением по патенту США №4600394 не дает преимуществ.
Предпочтительно расстояние Dy между насадкой 6 винтового насоса и корпусом 10 судна определяется таким образом, чтобы гребной винт 4 работал оптимально в кильватерной струе. Предпочтительно, чтобы движительный комплекс находился в кильватерной струе судна, но в то же время избегал вязкостной составляющей попутного потока, которая резко снижает скорость потока воды относительно судна. Выгодным образом предпочтение отдается положению в той части кильватерной струи, которая создает среднее снижение скорости потока порядка 15%. Кроме того преимущества, что это позволяет уменьшить высоту несущей стойки 3, такое положение винтового насоса позволяет также оптимально повысить кпд движителя по сравнению с расположением за пределами граничного слоя кильватерной струи.
На фиг.2 движительный комплекс 1 показан в перспективе для более наглядного представления венца 5 направляющих лопаток и гребного винта 4. В данном примере выполнения венец 5 содержит шесть направляющих лопаток 50-55 для направления потока воды, входящего в винтовой насос, таким образом, чтобы придать ему крутящий момент, по существу равный крутящему моменту ротора, но действующий в противоположном направлении. При этом на выходе из ротора поток воды теряет энергию вращения, создавая преимущество в повышении кпд винтового насоса. На фиг.2 направляющая лопатка 55 закрыта задней частью гондолы 2.
Каждая направляющая лопатка имеет, по меньшей мере, по существу плоскую поверхность, которая ориентирована определенным образом относительно оси Х гондолы. Угол αn ориентации направляющей лопатки определяется как угол между плоскостью лопатки и осью X. Каждая направляющая лопатка, такая как 52 или 54, прикреплена к задней части гондолы под своим собственным углом ориентации, таким как α2 или α4. Предпочтительно каждый угол αn определен на основании карты кильватерной струи судна при его крейсерской скорости. Таким образом, каждый угол αn принят в виде функции входного потока воды, чтобы направлять поток на вход в ротор и устранять явления кавитации. Влияние несущей стойки 3 на струи воды на входе в насадку принимается во внимание, в частности, для расчета угла α2 ориентации направляющей лопатки 52, расположенной за несущей стойкой 3. Входной профиль насадки также предпочтительно определен на основе карты кильватерной струи судна при его крейсерской скорости.
Кроме того, поскольку ротор движительного комплекса вращается быстрее обычного винтового насоса, он развивает более низкий крутящий момент, так что отклонение потока в статоре должно оставаться умеренным, чтобы соответствовать этому крутящему моменту. Отсюда следует, что углы ориентации направляющих лопаток относительно невелики и возможен также проход воды в обратном направлении. Каждый угол αn ориентации может быть определен, например, в пределах от 3° до 15°, что позволяет получать достаточную тягу для заднего хода путем реверса вращения гребного винта 4, и при этом создаваемый винтом поток воды не будет заметно возмущаться направляющими лопатками. Кроме того, ротор, в котором каждая лопасть имеет прямолинейную образующую, может воспринимать полный номинальный крутящий момент при обратном вращении ротора в отличие от традиционного «косого» винта, описанного, например, в патенте США №6371726. В роторе по изобретению этот эффект достигается благодаря хорошему распределению механических напряжений по поверхности лопаток, что улучшает тягу торможения. Подразумевается, что объект с прямолинейной образующей образован перемещением плоского контура по прямой линии, пересекающей плоскость контура.
Лопасти 14 гребного винта немного скручены, как это видно на фиг.2, то есть их образующие имеют слегка криволинейную форму. Разумеется, может быть отдано предпочтение лопастям с прямыми образующими для дальнейшего увеличения тяги торможения. Кроме того, на чертеже видно, что кромка 7 оконечности лопасти 14, подходящая вплотную к внутренней стенке насадки 6, криволинейна. Кроме того, как показано на фиг.1, насадка немного сужается к задней части. И наконец, следует отметить, что ось Y поворота движительного комплекса не обязательно должна совпадать с осью симметрии несущей стойки 3 и может быть смещена вперед, как это показано на фиг.2 осью Y'.
Моделирование вычислительным методом, выполненное заявителем, позволило произвести сравнение между обычным движительным комплексом типа POD с гребным винтом, расположенным перед гондолой, и движительным комплексом по изобретению, который также выполнен по типу POD с электродвигателем, размещенным внутри гондолы. В качестве примера такой движительный комплекс по изобретению имеет гондолу 2 диаметром порядка 2 м и насадку диаметром порядка 4 м для двигателя мощностью порядка 13 МВт. Венец 5 содержит семь направляющих лопаток, а ротор 4 - пять лопастей 14. Число оборотов ротора превышает 200 об/мин. Установлено, что при равной мощности двигателя решение по изобретению позволяет снизить массу двигателя более чем на 50% и уменьшить более чем на 25% диаметр гребного винта и диаметр насадки. Кроме того, получено снижение необходимой глубины под судном или осадки на величину порядка 3 м и повышение кпд движителя с винтовым насосом более чем на 5%. Таким образом, в целом изобретение дает значительные преимущества по сравнению с известными судовыми движительными комплексами и движителями в виде винтовых насосов.
На фиг.3 на виде сверху схематично представлен движительный комплекс 1' в другом примере выполнения. Гондола 2 и винтовой насос показаны в разрезе в горизонтальной плоскости, проходящей через продольную ось Х гондолы, а несущая стойка 3' показана в разрезе в другой горизонтальной плоскости, над гондолой. Задняя оконечная часть 3'А несущей стойки 3' образует направляющую лопатку, причем эта часть имеет по существу плоскую поверхность с заданным углом α' ориентации к оси Х гондолы. Венец 5 содержит, по меньшей мере, две направляющие лопатки, подобные направляющим лопаткам 50-55 по фиг.1 и 2, в дополнение к которым имеется особая направляющая лопатка 3'А.
В общем случае в движительном комплексе по изобретению зона Zx. в которой насадка направляющих лопаток размещается перпендикулярно продольной оси Х гондолы, расположена между центральной частью несущей стойки и гребным винтом, причем эта центральная часть несущей стойки содержит выполненную в стойке полость, которая сообщается с внутренним пространством судна. В примере выполнения по фиг.3 эта центральная часть С несущей стойки 3' находится по существу над двигателем 8, установленным в гондоле, и в этой центральной части С предусмотрена принудительная циркуляция воздуха между гондолой и внутренним пространством судна с достаточным расходом для охлаждения двигателя.
Задняя оконечная часть 3'А несущей стойки может проходить вверх до корпуса судна через насадку 6. В этом случае должно быть предусмотрено переднее усиление задней части 3'А, чтобы обеспечить возможность ввода верхней части насадки с опорой на заднюю часть 3'А. Такое решение позволяет в определенной степени снизить гидродинамическое сопротивление движительного комплекса по сравнению с примером выполнения по фиг.1 и 2.
На фиг.4 очень схематично показан на виде спереди от носа к корме судна движительный комплекс 1'' в другом примере выполнения. Этот комплекс выполнен по типу POD и содержит два идентичных или почти идентичных движителя, расположенных рядом друг с другом. Каждый движитель идентичен движительному комплексу 1 или 1' движителя. Два движителя механически связаны с одной поворотной несущей стойкой 3'', установленной под корпусом 10 судна. Эта несущая стойка 3'' имеет форму звезды с тремя лучами, а ее ось Y'' поворота соответствует наиболее широкому лучу. Таким образом, мощность движительного комплекса 1 или 1' по фиг.1-3 может быть практически удвоена без необходимости разработки более мощного гребного винта и увеличения осадки судна. Кроме того, сохраняется преимущество наличия только одной уплотненной подшипниковой опоры, проходящей через корпус судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬНАЯ УСТАНОВКА | 2015 |
|
RU2629812C1 |
| СУДОВАЯ ВИНТОРУЛЕВАЯ КОЛОНКА | 1997 |
|
RU2126762C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ СУДОВЫХ ДВИЖИТЕЛЕЙ | 2001 |
|
RU2216476C2 |
| СУДОВАЯ ВИНТОРУЛЕВАЯ КОЛОНКА ДЛЯ ДВИЖЕНИЯ И МАНЕВРИРОВАНИЯ СУДНА В ЛЕДОВЫХ УСЛОВИЯХ | 1998 |
|
RU2128126C1 |
| Движительный комплекс надводного судна с подвесным двигателем | 2021 |
|
RU2758525C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2222469C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 1996 |
|
RU2115588C1 |
| УНИВЕРСАЛЬНОЕ ПОЛУПОГРУЖНОЕ КРУПНОТОННАЖНОЕ ТРАНСПОРТНОЕ СУДНО ДЛЯ ПЛАВАНИЯ В МОРЯХ С ЛЕДОВЫМ ПОКРОВОМ И НА ЧИСТОЙ ВОДЕ | 2015 |
|
RU2585199C1 |
| Движительный комплекс объекта в водной среде | 2024 |
|
RU2840558C1 |
| ПРОПУЛЬСИВНАЯ СИСТЕМА С ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2320516C1 |
Изобретение относится к судовому движительному комплексу. Судовой движительный комплекс содержит, по меньшей мере, одну гондолу, механически связанную с несущей стойкой, установленной под корпусом судна, и гребной винт, расположенный позади гондолы. При этом гребной винт имеет, по меньшей мере, две лопасти и приводится во вращение трансмиссионным валом, связанным с двигателем. При этом к гондоле прикреплены три направляющие лопатки, образующие венец, перпендикулярный продольной оси гондолы. На гондоле расположена насадка, которая, по меньшей мере, частично окружает гребной винт и венец направляющих лопаток. Каждая лопасть имеет оконечность с кромкой, подходящей вплотную к внутренней стенке насадки, так что гребной винт образует ротор винтового насоса, а венец размещен в зоне, расположенной между центральное частью несущей стойки и гребным винтом. Повышается КПД движителя. 3 н. и 9 з.п. ф-лы, 4 ил.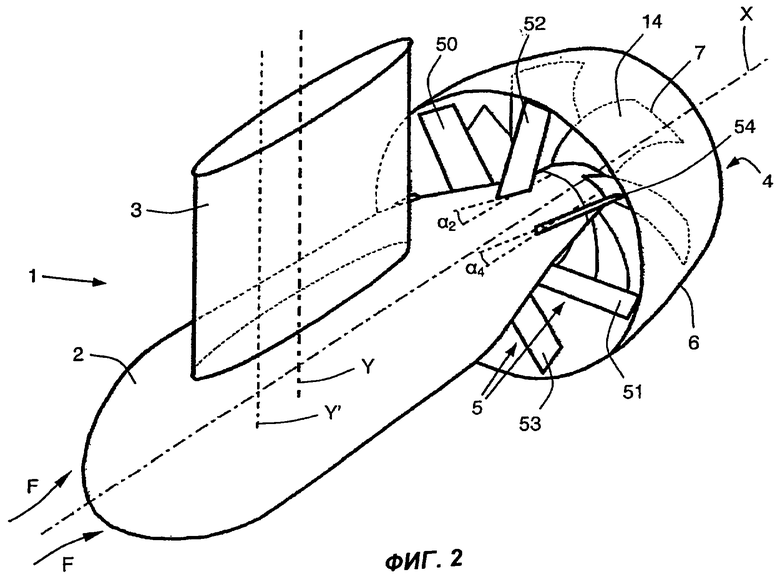
1. Судовой движительный комплекс (1, 1', 1''), содержащий, по меньшей мере, одну гондолу (2), механически связанную с несущей стойкой (3, 3', 3''), выполненной с возможностью установки под корпусом (10) судна; и гребной винт (4), расположенный позади гондолы, имеющий, по меньшей мере, две лопасти (14) и приводимый во вращение трансмиссионным валом (11), связанным с двигателем (8);
отличающийся тем, что содержит систему, по меньшей мере, трех направляющих лопаток (50-55, 3'А), прикрепленных к гондоле (2), причем указанная система образует венец (5), по существу, перпендикулярный продольной оси (X) гондолы (2); и насадку (6), которая, по меньшей мере, частично окружает гребной винт (4) и венец (5) направляющих лопаток, причем каждая лопасть (14) имеет оконечность с кромкой (7), подходящей вплотную к внутренней стенке насадки (6), так что гребной винт (4) образует ротор винтового насоса, а венец (5) размещен в зоне (Zx), расположенной между центральной частью несущей стойки (3, 3', 3'') и гребным винтом.
2. Комплекс по п.1, отличающийся тем, что насадка (6) закреплена на гондоле (2) посредством, по меньшей мере, пяти направляющих лопаток (50-55, 3'А), а гребной винт (4) имеет, по меньшей мере, три лопасти (14).
3. Комплекс по п.1, отличающийся тем, что каждая направляющая лопатка (50-55, 3'А) венца (5) имеет, по меньшей мере, по существу, плоскую поверхность, расположенную под заданным углом (α0,…α5,…, α') ориентации относительно оси (X) гондолы (2).
4. Комплекс по п.3, отличающийся тем, что входной профиль насадки (6) и угол (α0,…,α5,…,α') ориентации каждой направляющей лопатки скоординированы с картой кильватерной струи.
5. Комплекс по п.3 или 4, отличающийся тем, что заданный угол (α0,…,α5,…,α') ориентации каждой направляющей лопатки составляет от 3 до 15°.
6. Комплекс по п.1, отличающийся тем, что направление вращения гребного винта (4) является реверсируемым для обеспечения торможения судна тягой.
7. Комплекс по п.1, отличающийся тем, что каждая лопасть (14) ротора винтового насоса имеет прямолинейную образующую.
8. Комплекс по п.1, отличающийся тем, что задняя оконечность (3'А) несущей стойки (3') образует одну из направляющих лопаток венца (5).
9. Судно, отличающееся тем, что оно снабжено, по меньшей мере, одним движительным комплексом (1, 1', 1''), охарактеризованным в любом из предыдущих пунктов, причем несущая стойка (3, 3', 3'') указанного комплекса выполнена с возможностью жесткой установки под корпусом (10) судна.
10. Судно по п.9, отличающееся тем, что расстояние (Dу) между насадкой (6) и корпусом (10) судна выбрано из условия обеспечения оптимальной работы гребного винта (4) в кильватерной струе.
11. Судно, отличающееся тем, что оно снабжено, по меньшей мере, одним движительным комплексом (1, 1', 1''), охарактеризованным в любом из пп.1-8, причем несущая стойка (3, 3', 3'') указанного комплекса выполнена с возможностью поворотной установки под корпусом (10) судна, так что движительный комплекс образует ориентируемый пропульсивный привод.
12. Судно по п.11, отличающееся тем, что расстояние (Dу) между насадкой (6) и корпусом (10) судна выбрано из условия обеспечения оптимальной работы гребного винта (4) в кильватерной струе.
| US 6062925 А, 16.05.2000 | |||
| СУДОВАЯ ВИНТОРУЛЕВАЯ КОЛОНКА | 1997 |
|
RU2126762C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2222469C1 |

