Изобретение относится к области измерительной техники и преимущественно может быть использовано для определения силы натяжения протягиваемых упругих изделий, например проволок, струн, проводов, нитей, волокон, канатов, тросов, кабелей и лент при их изготовлении и эксплуатации.
Известны способ и устройство для измерения силы натяжения по патенту США 4628747, 1986. Данный способ используется для измерения силы натяжения оптоволоконного кабеля при протягивании через кабелепровод и заключается в том, что устанавливают между протягиваемым кабелем и тяговым тросом резистивный элемент с изменяемым под действием силы натяжения электрическим сопротивлением, преобразуют силу натяжения кабеля в электрический сигнал, регистрируют электрический сигнал, соответствующий силе натяжения кабеля, и производят индикацию при превышении силой натяжения максимально допустимого значения. Недостатками указанного способа являются низкая чувствительность преобразователя силы натяжения в электрический сигнал, низкая точность измерений и ограниченная область применения, что связано с ограниченностью длины протягиваемого кабеля и невозможностью намотки протянутого кабеля на приемную катушку.
Известны способы и реализующие их устройства для измерения силы натяжения протягиваемых упругих изделий (проволок, нитей, лент) по авторским свидетельствам СССР 1656353, 1991, 1760403, 1992, патенту Российской Федерации 2127162, 1999, заявке ФРГ 3506698, 1986, заявке Франции 2578050, 1986 и патенту Великобритании 2171801, 1986, предусматривающие в общей для них части отклонение протягиваемого упругого изделия с траектории его движения нитеводителем (лентоводителем) в виде подвижного ролика силой, создаваемой упругостью пружины или гидравлическим цилиндром и приложенной в плоскости, перпендикулярной протягиваемому изделию, и определение силы натяжения либо непосредственно по показаниям механического динамометра, либо с использованием измерения величины электрического сигнала, пропорционального отклонению нитеводителя и полученного с оптико-электронного датчика, датчика Холла или датчика давления в гидравлическом цилиндре. Недостатками данных способов являются необходимость механического воздействия на протягиваемое упругое изделие для обеспечения выполнения измерений, что приводит к изменению условий его протяжки и вызывает возникновение погрешности измерений, а также низкая точность измерений, обусловленная погрешностями изготовления и зависимостью параметров, вызывающих отклонение нитеводителя механических и гидравлических узлов от времени и изменяющихся условий окружающей среды.
Известны способы и реализующие их устройства для определения силы натяжения токопроводящих нитей по авторским свидетельствам СССР 496477, 1973, 690342, 1976, 781626, 1980, 1076781, 1984 и патенту Российской Федерации 2143672, 1999, которые в общей для них части включают пропускание через токопроводящую нить или возбуждение в ней электрического тока, возбуждение поперечных механических колебаний нити путем воздействия на нее электрическим или электромагнитным полем, преобразование поперечных механических колебаний нити в электрический сигнал, усиление электрического сигнала, измерение частоты электрического сигнала, соответствующей частоте поперечных механических колебаний нити, и определение силы натяжения нити в соответствии с известной зависимостью между частотой поперечных механических колебаний и силой натяжения нити.
Недостатками данных аналогов являются
- необходимость пропускания через нить, как правило оголенную и не закрытую защитными кожухами или экранами, электрического тока, что вызывает опасность поражения им обслуживающего персонала;
- необходимость, в ряде случаев, остановки процесса протяжки нити для измерения силы ее натяжения, приводящая к увеличению затрат времени на протяжку и к возникновению дополнительных погрешностей измерения, вызванных изменением силы натяжения при остановке;
- вынужденное применение возбудителя колебаний нити и преобразователя колебаний в электрический сигнал, основанных на различных физических принципах, для исключения погрешности измерения из-за влияния возбудителя колебаний непосредственно на преобразователь колебаний в электрический сигнал;
- использование возбуждения поперечных механических колебаний нити, которое приводит к изменению силы ее натяжения и к возникновению погрешностей измерения;
- ограниченность области применения из-за возможности определения силы натяжения только токопроводящих нитей.
Наиболее близким по технической сущности к предлагаемому изобретению следует считать способ определения силы натяжения, реализованный в датчике натяжения преимущественно оптического волокна по авторскому свидетельству СССР 1430768, 1988, G 01 L 5/10, и используемый при протяжке изготовляемого волокна между заготовкой и фильерой. Сущность прототипа заключается в следующем:
- возбуждают поперечные механические колебания протягиваемого волокна акустическим или электростатическим возбудителем колебаний;
- преобразуют возбужденные поперечные механические колебания волокна в электрический сигнал, например с использованием источника и приемника оптического излучения, между которыми протягивают волокно;
- усиливают электрический сигнал;
- выделяют низшую гармоническую составляющую электрического сигнала;
- преобразуют низшую гармоническую составляющую электрического сигнала, в том числе с введением фазового опережения, и поддерживают поперечные механические колебания волокна с использованием преобразованного электрического сигнала;.
- измеряют частоту f низшей гармонической составляющей электрического сигнала;
- определяют силу F натяжения протягиваемого волокна на основании измеренной частоты в соответствии с выражением F=4ρS(l f)2, где ρ - плотность материала волокна, S - площадь поперечного сечения волокна, l - длина участка волокна между заготовкой и фильерой.
Из приведенного выражения видно, что определение силы натяжения протягиваемого упругого изделия по частоте его поперечных механических колебаний должно производиться при неизменной длине участка волокна, в данном случае между заготовкой и фильерой, иначе изменения указанной длины приведут к возникновению погрешностей измерений.
Недостатком прототипа является необходимость для выполнения измерения силы натяжения производить механическое воздействие на протягиваемое упругое изделие для возбуждения и поддержания вынужденных поперечных механических колебаний, что приводит к изменению условий протяжки, в частности к изменению самой силы натяжения, возникновению в связи с этим погрешности измерения и усложнению реализующего способ устройства из-за наличия узлов, возбуждающих и поддерживающих вынужденные поперечные механические колебания. Кроме того, при протяжке происходит непрерывное изменение длины участка протягиваемого волокна между заготовкой и фильерой, связанное с расходом материала заготовки и уменьшением ее размеров, а также с изменением в процессе колебаний длины прилегающего к поверхности фильеры участка волокна, что приводит к изменению частоты поперечных механических колебаний и, следовательно, возникновению погрешности определения силы натяжения.
Целью изобретения является повышение точности определения силы натяжения за счет выполнения измерений частоты, возникающих при протяжке из-за пульсаций силы натяжения параметрических поперечных механических колебаний измерительного участка фиксированной длины протягиваемого упругого изделия без возбуждения его вынужденных поперечных механических колебаний, что не вызывает изменения условий протяжки, в том числе силы натяжения и длины участка протягиваемого упругого изделия, на котором возникают колебания, а также существенное упрощение конструкции реализующего предлагаемый способ устройства вследствие исключения из устройства узлов, возбуждающих и поддерживающих поперечные механические колебания.
Поставленная цель достигается согласно изобретению тем, что предлагаемый способ определения силы натяжения протягиваемого упругого изделия, включающий в соответствии с прототипом преобразование поперечных механических колебаний протягиваемого упругого изделия в электрический сигнал, усиление электрического сигнала, выделение низшей гармонической составляющей электрического сигнала, измерение частоты низшей гармонической составляющей электрического сигнала, определение силы натяжения протягиваемого упругого изделия по измеренной частоте низшей гармонической составляющей электрического сигнала, отличается от прототипа тем, что формируют измерительный участок фиксированной длины протягиваемого упругого изделия и преобразуют в электрический сигнал возникающие при протяжке вследствие пульсаций силы натяжения параметрические поперечные механические колебания измерительного участка фиксированной длины протягиваемого упругого изделия. При этом формирование измерительного участка фиксированной длины протягиваемого упругого изделия производят его отклонением с траектории протяжки остальной части протягиваемого упругого изделия, которое производят, по меньшей мере, двумя опорными элементами, установленными с двух диаметрально противоположных сторон протягиваемого упругого изделия на фиксированном расстоянии между ними, причем в качестве опорных элементов используют направляющие ролики или фильеры. Указанное преобразование поперечных механических колебаний протягиваемого упругого изделия в электрический сигнал выполняют датчиком, установленным вблизи точки максимума собственной формы параметрических поперечных механических колебаний измерительного участка фиксированной длины протягиваемого упругого изделия.
Указанная совокупность отличительных признаков в известных аналогах не обнаружена.
При протяжке упругих изделий, например проволок, струн, проводов, нитей, волокон, канатов, тросов, кабелей, лент, неизбежно возникают незначительные пульсации силы натяжения из-за непостоянства тормозящего и крутящего моментов в узлах соответственно подающей и приемной катушек, наличия в них люфтов и зазоров, неровности поверхностей направляющих роликов, фильер и самих протягиваемых упругих изделий, а также наличия силы трения между соприкасающимися витками протягиваемого упругого изделия, сматываемого с подающей катушки. Эти неизбежно возникающие при протяжке пульсации силы натяжения вызывают соответствующие пульсации поперечной жесткости протягиваемого упругого изделия, которая является линейной функцией от величины силы натяжения. Поскольку частотный спектр пульсаций силы натяжения и поперечной жесткости протягиваемого упругого изделия широк, происходит параметрическое возбуждение поперечных механических колебаний протягиваемого упругого изделия, спектр которых совпадает со спектром собственных частот протягиваемого упругого изделия. При этом низшая гармоническая составляющая параметрических поперечных механических колебаний имеет частоту, которая совпадает с низшей собственной частотой измерительного участка, определяемой параметрами протягиваемого упругого изделия и силой его натяжения. Поэтому сам процесс протяжки упругого изделия приводит к возбуждению его параметрических поперечных механических колебаний, собственная частота низшей гармонической составляющей которых при известных параметрах протягиваемого упругого изделия позволяет судить о величине его силы натяжения.
Поэтому формирование измерительного участка фиксированной длины протягиваемого упругого изделия, преобразование в электрический сигнал параметрических поперечных механических колебаний измерительного участка фиксированной длины протягиваемого упругого изделия, возникающих при протяжке вследствие пульсаций силы натяжения, и дальнейшие, по аналогии с прототипом, усиление сигнала, выделение из него низшей гармонической составляющей и измерение ее частоты позволяют определять в соответствии с известной зависимостью силу натяжения протягиваемого упругого изделия. При этом не возникает необходимости в возбуждении и поддержании вынужденных поперечных механических колебаний протягиваемого упругого изделия, что позволяет производить измерения силы натяжения без механического воздействия на упругое изделие и изменения условий протяжки, в том числе самой силы натяжения, повысить точность за счет измерения реально действующей при протяжке силы натяжения, а не ее искаженной вынужденными поперечными механическими колебаниями упругого изделия величины и существенно упростить конструкцию реализующего способ устройства вследствие исключения из его состава узлов, обеспечивающих возбуждение и поддержание вынужденных поперечных механических колебаний.
Формирование измерительного участка фиксированной длины протягиваемого упругого изделия путем его отклонения с траектории протяжки остальной части протягиваемого упругого изделия, по меньшей мере, двумя опорными элементами, например направляющими роликами или фильерами, установленными с двух диаметрально противоположных сторон упругого изделия на фиксированном расстоянии между ними, при размещении датчика механических колебаний вблизи точки максимума собственной формы параметрических поперечных механических колебаний измерительного участка фиксированной длины протягиваемого упругого изделия обеспечивает измерение частоты низшей гармонической составляющей параметрических поперечных механических колебаний измерительного участка протягиваемого упругого изделия, который имеет постоянную длину, не изменяющуюся в процессе протяжки как из-за изменения длины прилегающих к поверхностям опорных элементов участков упругого изделия или из-за нарушения его контакта с опорными элементами вследствие его поперечных механических колебаний, в особенности со значительной амплитудой, так и вследствие изменения при протяжке размеров заготовки для производимого упругого изделия, как это было при использовании известного способа. Поскольку частота поперечных механических колебаний протягиваемого упругого изделия зависит не только от силы его натяжения, но и от длины колеблющегося участка изделия, постоянство длины измерительного участка протягиваемого упругого изделия обеспечивает влияние на частоту колебаний только силы натяжения и поэтому предотвращает возникновение погрешности определения силы натяжения, обусловленной изменением длины участка изделия, обеспечивая повышение точности.
Отмеченное свидетельствует о существенности указанных отличительных признаков.
Сущность предлагаемого способа определения силы натяжения протягиваемого упругого изделия заключается в следующем:
- формируют измерительный участок фиксированной длины протягиваемого упругого изделия путем отклонения его с траектории протяжки остальной части протягиваемого упругого изделия" по меньшей мере, двумя опорными элементами, например направляющими роликами или фильерами, установленными с двух диаметрально противоположных сторон протягиваемого упругого изделия на фиксированном расстоянии между ними;
- преобразуют в электрический сигнал параметрические поперечные механические колебания измерительного участка фиксированной длины протягиваемого упругого изделия, возникающие при протяжке вследствие пульсаций силы натяжения и происходящие с частотой, совпадающей с его собственной частотой. Указанное преобразование выполняют датчиком, установленным вблизи точки максимума собственной формы параметрических поперечных механических колебаний измерительного участка фиксированной длины протягиваемого упругого изделия;
- усиливают полученный электрический сигнал;
- выделяют низшую гармоническую составляющую усиленного электрического сигнала;
- измеряют частоту выделенной низшей гармонической составляющей электрического сигнала;
- определяют силу натяжения протягиваемого упругого изделия на основании измеренной частоты в соответствии с известной зависимостью.
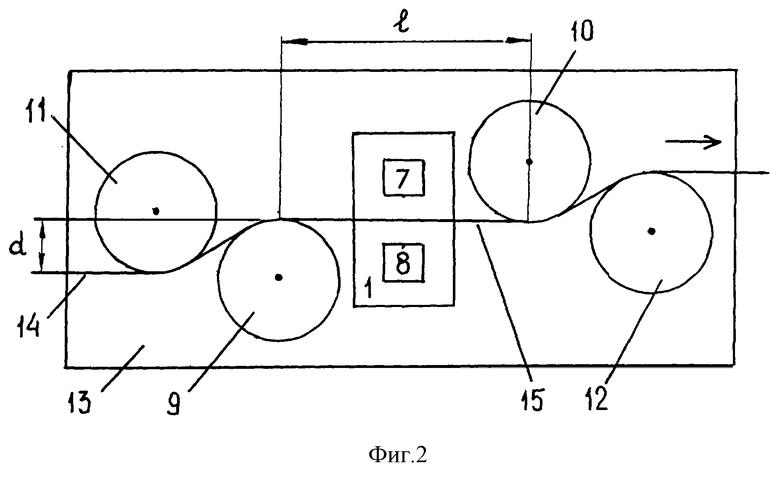
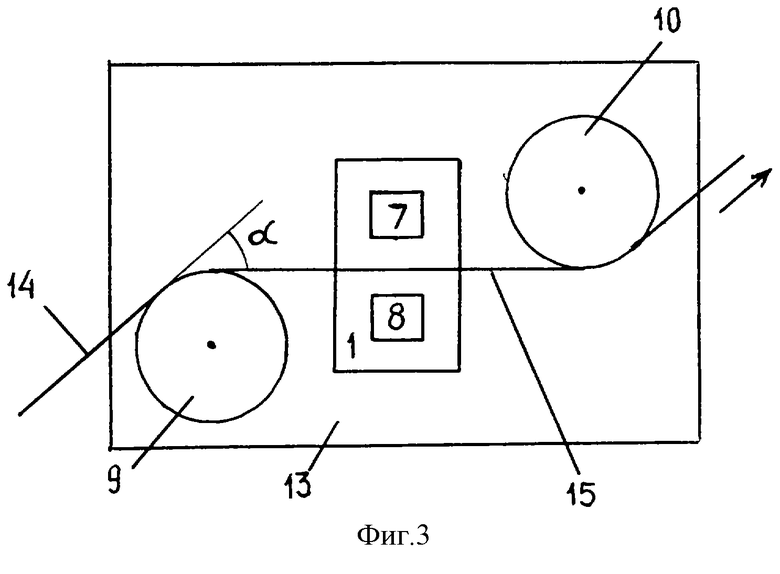
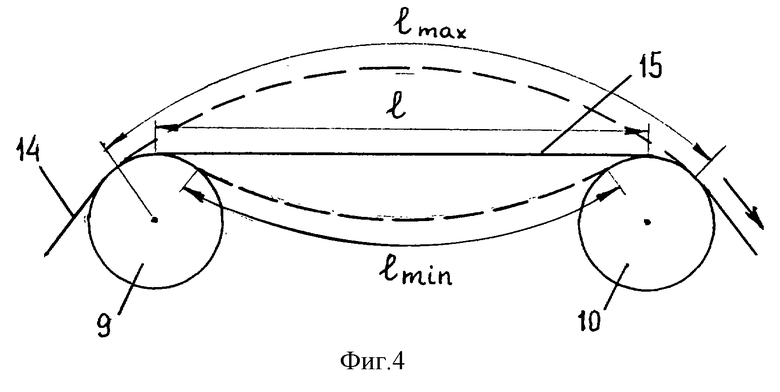
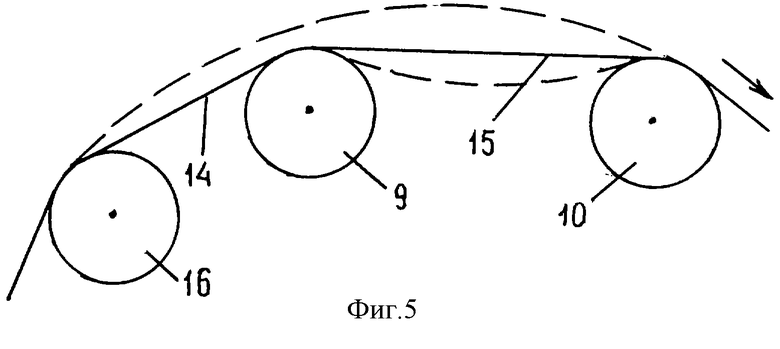
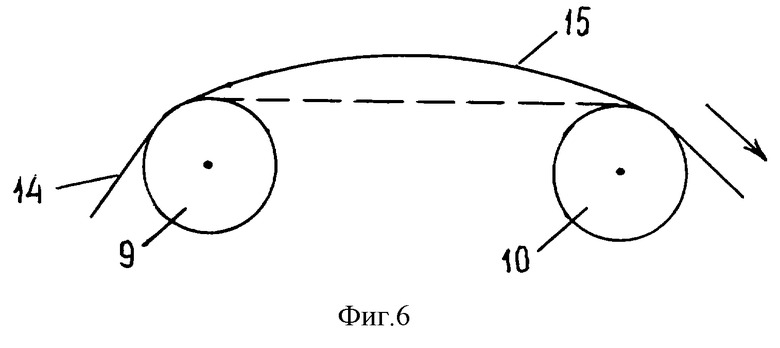
На фигуре 1 представлена структурная схема устройства, реализующего предлагаемый способ определения силы натяжения протягиваемого упругого изделия, где 1 - датчик колебаний, 2 - дифференциальный усилитель, 3 - полосовой частотный фильтр, 4 - усилитель-ограничитель, 5 - преобразователь частоты импульсов в цифровой код, 6 - цифровой индикатор и 7, 8 - соответственно первый и второй чувствительные элементы датчика 1 колебаний. На фигурах 2 и 3 показаны возможные конструкции узла формирования измерительного участка фиксированной длины протягиваемого упругого изделия и размещение на нем датчика 1 колебаний и его чувствительных элементов 7 и 8, где 9, 10 - соответственно первый и второй направляющие ролики, 11, 12 - соответственно первый и второй прижимные ролики, 13 - основание узла, 14 - протягиваемое упругое изделие и 15 - измерительный участок фиксированной длины протягиваемого упругого изделия 14. Фигуры 4, 5 и 6 иллюстрируют процесс изменения длины измерительного участка при поперечных механических колебаниях протягиваемого упругого изделия, где 9, 10 - соответственно первый и второй направляющие ролики, 14 - протягиваемое упругое изделие, 15 - измерительный участок протягиваемого упругого изделия 14 и 16 - вспомогательная опора.
В устройстве (см. фиг.1), реализующем предлагаемый способ, последовательно соединены первый чувствительный элемент 7 датчика 1 колебаний, дифференциальный усилитель 2, полосовой частотный фильтр 3, усилитель-ограничитель 4, преобразователь 5 частоты импульсов в цифровой код и цифровой индикатор 6, причем второй вход дифференциального усилителя 2 подключен к выходу второго чувствительного элемента 8 датчика 1 колебаний.
Первый 7 и второй 8 чувствительные элементы датчика 1 колебаний могут быть выполнены электромагнитными в виде обмоток с незамкнутым магнитопроводом для протягиваемого упругого изделия из ферромагнитного материала и для всех видов материалов акустическими или оптическими, состоящими из согласованных по спектральным характеристикам излучателя и приемника оптического излучения. Датчик 1 колебаний установлен (см. фиг.2 и 3) на середине измерительного участка 15 протягиваемого упругого изделия 14 между первым 9 и вторым 10 направляющими роликами, где наблюдается максимум собственной формы, соответствующей низшей частоте его параметрических поперечных механических колебаний, причем первый 7 и второй 8 чувствительные элементы датчика 1 колебаний размещены с двух диаметрально противоположных сторон измерительного участка 15 протягиваемого упругого изделия 14 на одинаковом расстоянии от него.
Полосовой частотный фильтр 3 имеет полосу пропускания, нижняя и верхняя граничные частоты которой определяются соответственно минимально и максимально возможными частотами поперечных механических колебаний и вычисляются по минимальному и максимальному значениям силы натяжения протягиваемого упругого изделия, например для протягиваемой струны, согласно выражения f = πF1/2/(1ρ1/2S1/2), где F - сила натяжения, l - длина измерительного участка 15 струны, ρ и S - соответственно плотность и площадь поперечного сечения струны.
Цифровой индикатор 6 проградуирован в единицах измерения силы натяжения в соответствии с калибровочной характеристикой, полученной на основании известной аналитической зависимости между силой натяжения и частотой низшей гармонической составляющей параметрических поперечных механический колебаний протягиваемого упругого изделия либо экспериментальным путем. Например, для протягиваемой струны указанная аналитическая зависимость имеет вид F = ρS12f2/π2, где ρ - плотность материала струны, S - площадь поперечного сечения струны, l - длина измерительного участка 15 струны (см. фиг.2 и 3) между первым 9 и вторым 10 направляющими роликами и f - частота низшей гармонической составляющей параметрических поперечных механических колебаний струны.
Первый 9 и второй 10 направляющие ролики установлены на основании 13 узла формирования измерительного участка с возможностью перемещения для изменения при регулировках длины 1 измерительного участка 15 фиксированной длины протягиваемого упругого изделия 14. Необходимость подобной регулировки может возникнуть при использовании устройства для протяжки другого вида протягиваемого упругого изделия, когда из-за изменения частоты параметрических поперечных механических колебаний происходит соответствующее изменение частоты низшей гармонической составляющей электрического сигнала, в результате чего указанная частота может оказаться за пределами полосы пропускания полосового частотного фильтра 3. В этом случае изменением длины 1 измерительного участка 15 удается изменить частоту параметрических поперечных механических колебаний измерительного участка 15 и, следовательно, частоты низшей гармонической составляющей электрического сигнала так, чтобы последняя лежала в пределах полосы пропускания полосового частотного фильтра 3. Например, для струны значение требуемой фиксированной длины измерительного участка 15 протягиваемого упругого изделия 14 определяется выражением 1тр = πF1/2/(fρ1/2S1/2), где используются прежние буквенные обозначения и куда подставляются номинальное значение силы натяжения и значение частоты, соответствующее середине полосы пропускания полосового частотного фильтра 3.
Устройство, реализующее предлагаемый способ определения силы натяжения протягиваемого упругого изделия, работает следующим образом.
Осуществляется протяжка протягиваемого упругого изделия 14. Формирование измерительного участка 15 фиксированной длины 1 протягиваемого упругого изделия выполняют первый 9 и второй 10 направляющие ролики, которые отклоняют измерительный участок 15 с траектории протяжки остальной части протягиваемого упругого изделия 14 параллельным смещением измерительного участка 15 на расстояние d (см. фиг.2) или поворотом указанного участка на некоторый угол α (см. фиг.3). При этом длина прилегающих к поверхностям первого 9 и второго 10 направляющих роликов участков протягиваемого упругого изделия 14 в первом случае (см. фиг.2) определяется положением первого 11 и второго 12 прижимных роликов, а во втором случае - значением угла α поворота (см. фиг.3).
Вследствие наличия неизбежных при протяжке пульсаций силы натяжения возникают соответствующие пульсации поперечной жесткости измерительного участка 15 протягиваемого упругого изделия 14, что приводит к возникновению его параметрических поперечных механических колебаний.
При традиционном расположении опор в виде первого 9 и второго 10 направляющих роликов (см. фиг.4 и 5) поперечные механические колебания приводят к изменению длины 1 измерительного участка 15 протягиваемого упругого изделия 14 от значения lmin до значения lmах, как это иллюстрирует фиг.4, где штриховыми линиями показаны положения протягиваемого упругого изделия 14 при максимальных отклонениях в процессе колебаний от равновесного положения. Более того, при незначительных значениях силы натяжения и большой амплитуде поперечных механических колебаний (см. фиг.5) возможен отрыв протягиваемого упругого изделия 14 от одной из опор, например первого направляющего ролика 9 (см. штриховую линию на фиг.5), что вызовет скачкообразное и весьма значительное по величине увеличение длины измерительного участка 15 протягиваемого упругого изделия 14. Когда протягиваемое упругое изделие 14 обладает значительной по величине поперечной жесткостью, например при коротком измерительном участке толстого троса или каната, форма и, следовательно, длина измерительного участка 15 в статическом равновесии будут отличаться (см. фиг.6) от расчетных формы и длины, показанных штриховой линией.
При формировании измерительного участка 15 фиксированной длины протягиваемого упругого изделия 14 в соответствии с предлагаемым способом (см. фиг. 2 и 3) случаи отрыва протягиваемого упругого изделия 14 от опоры (см. фиг. 5) и искажения формы и длины его измерительного участка 15 (см. фиг.6) невозможны. Изменения длины измерительного участка 15 протягиваемого упругого изделия 14 из-за его поперечных механических колебаний, как это возникает в случае, иллюстрируемом фиг.4, не происходит, поскольку при предлагаемом расположении опорных элементов (см. фиг.2 и 3) на сколько увеличится при колебательном движении измерительного участка 15 вверх его длина из-за уменьшения длины прилегающего к первому направляющему ролику 9 участка протягиваемого упругого изделия 14, на столько же одновременно уменьшится его длина из-за увеличения длины прилегающего ко второму направляющему ролику 10 участка протягиваемого упругого изделия 14, а при колебательном движении измерительного участка вниз все происходит наоборот. И в том, и в другом случае длина 1 измерительного участка 15 протягиваемого упругого изделия 14 остается постоянной, что не приводит к возникновению искажений частоты происходящих параметрических поперечных механических колебаний и не вызывает возникновения связанной с этим погрешности определения силы натяжения.
Первый 7 и второй 8 чувствительные элементы датчика 1 колебаний преобразуют параметрические поперечные механические колебания измерительного участка 15 фиксированной длины 1 протягиваемого упругого изделия 14 в противоположные по фазе электрические сигналы с частотой, равной собственной частоте параметрических механических колебаний, и амплитудой, пропорциональной амплитуде этих колебаний. Дифференциальный усилитель 2 (см. фиг.1) выполняет усиление разности указанных электрических сигнала, чем обеспечивается подавление синфазных помех и уменьшение, тем самым, систематической составляющей инструментальной погрешности измерений. Полосовой частотный фильтр 3 пропускает и усиливает только низшую гармоническую составляющую разностного электрического сигнала, частота которой лежит в пределах его полосы пропускания и определяется параметрами протягиваемого упругого изделия и силой его натяжения. Усилитель-ограничитель 4 производит ограничение гармонического электрического сигнала по амплитуде путем сравнения мгновенного значения его напряжения с пороговым уровнем и в результате формирует прямоугольные импульсы, имеющие частоту низшей гармонической составляющей. Преобразователь 5 частоты импульсов в цифровой код преобразует частоту полученных прямоугольных импульсов в двоичный цифровой код, который с учетом калибровочной характеристики отображается цифровым индикатором 6, показывая результат определения силы натяжения протягиваемого упругого изделия.
Таким образом, применение предлагаемого способа определения силы натяжения протягиваемого упругого изделия обеспечивает повышение точности определения силы натяжения за счет выполнения измерений частоты возникающих при протяжке из-за пульсаций силы натяжения параметрических поперечных механических колебаний измерительного участка фиксированной длины протягиваемого упругого изделия без возбуждения его вынужденных поперечных механических колебаний, что не вызывает изменения условий протяжки, в том числе силы натяжения и длины участка протягиваемого упругого изделия, на котором возникают колебания, а также существенное упрощение конструкции реализующего предлагаемый способ устройства вследствие исключения из устройства узлов, возбуждающих и поддерживающих поперечные механические колебания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОЛОЧЕНИЯ ПРОВОЛОКИ С ПРИМЕНЕНИЕМ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2116850C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ КАНАТА | 1996 |
|
RU2156965C2 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ ГАЗА В БАЛЛОНЕ | 1997 |
|
RU2154263C2 |
| Устройство для определения плотности жидких сред методом измерения частоты струнной автоколебательной системы | 2023 |
|
RU2827494C1 |
| Способ определения характеристики внутреннего трения в гибком элементе | 1981 |
|
SU1002896A1 |
| Способ измерения физической величины частотным датчиком | 1978 |
|
SU994941A1 |
| Способ контроля физико-механических свойств нитей и устройство для его осуществления | 1980 |
|
SU970217A1 |
| Способ определения массы и силы натяжения ленты и устройство для его осуществления | 1987 |
|
SU1538056A1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2685803C1 |
| Устройство для определения поверхностного натяжения жидкостей | 1987 |
|
SU1516886A1 |
Изобретение относится к измерительной технике и может быть использовано для определения силы натяжения протягиваемых упругих изделий, например проволок, струн и т. д. Способ заключается в том, что формируют измерительный участок фиксированной длины протягиваемого упругого изделия путем отклонения его с траектории протяжки остальной части протягиваемого упругого изделия, по меньшей мере, двумя опорными элементами, например направляющими роликами или фильерами, установленными с двух диаметрально противоположных сторон протягиваемого упругого изделия на фиксированном расстоянии между ними. Преобразуют в электрический сигнал параметрические поперечные механические колебания измерительного участка фиксированной длины протягиваемого упругого изделия, возникающие при протяжке вследствие пульсаций силы натяжения, усиливают полученный электрический сигнал, выделяют низшую гармоническую составляющую усиленного электрического сигнала, измеряют частоту выделенной низшей гармонической составляющей электрического сигнала и определяют силу натяжения протягиваемого упругого изделия на основании измеренной частоты в соответствии с известной зависимостью. Технический результат: повышение точности измерений. 3 з.п. ф-лы, 6 ил.
| Устройство для измерения натяжения магнитной ленты | 1978 |
|
SU714186A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ МАГНИТНОЙЛЕНТЫ | 1972 |
|
SU453597A1 |
| Устройство для измерения натяжения движущейся магнитной ленты | 1974 |
|
SU491850A1 |
| Устройство для измерения колебаний натяжения движущейся магнитной ленты | 1977 |
|
SU664064A1 |

