Изобретение относится к микроэлектронике и электронной технике, в частности к технологическим процессам изготовления пленочных резисторов.
Известен способ подгонки переменного резистора, основанный на изменении величины сопротивления путем уменьшения толщины резистивного слоя с помощью цилиндрического шлифовального диска, соосного резистору (заявка Японии 54-8652, Н 01 С 17/24).
Однако способ не обеспечивает корректировку функциональной характеристики переменного резистора, так как изменение толщины (и следовательно, изменение сопротивления) производится одновременно для всей площади резистора.
Наиболее близким к заявляемому является способ выравнивания высоколинейных пленочных потенциометров, основанный на разделении слоя сопротивления на сегменты, соединенных электропроводно, при этом общее сопротивление потенциометра равно сумме сопротивлений сегментов, а изменение значения сопротивления не превышает допуск на линейность пленочного потенциометра (патент ГДР 224992 Н 01 С 17/22). Недостатком метода является нарушение целостности пленки в поперечном направлении, что для датчика угла поворота неприемлемо.
Предлагаемый способ корректировки функциональной характеристики датчика угла поворота основан на электроискровом воздействии на подгоночные секции, причем новым является то, что в зависимости от измеренной первоначально и подлежащей корректировки функциональной характеристики датчика, производится выбор направления подгонки этих секций в сторону увеличения или уменьшения сопротивления и степени изменения их сопротивления.
На фиг.1 показана конструкция подложки датчика;
на фиг.2 - требуемая функциональная характеристика и допуск на нее;
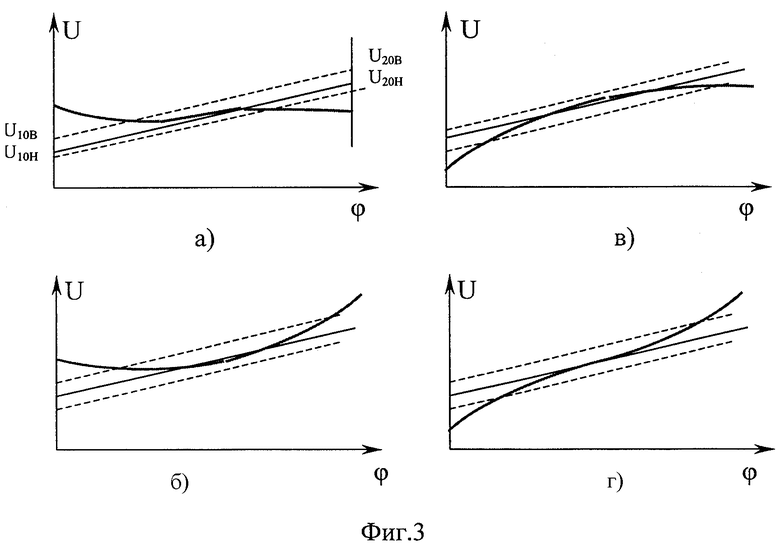
на фиг.3 - возможное отклонение характеристики до ее корректировки:
а) характеристика выше допуска в левой части резистора R2 и ниже допуска в правой его части;
б) характеристика выше допуска в левой и правой части резистора R2;
в) характеристика ниже допуска в левой и правой части резистора R2;
г) характеристика ниже допуска в левой части резистора R2 и выше допуска в правой его части.
На фиг.4 изображена структурная схема устройства для реализации способа.
Датчик угла поворота представляет собой резистор криволинейной формы R2, расположенный на подложке, и две подстроечные секции R1 и R3, включенные последовательно к началу и концу указанного резистора, сопротивление каждой из которых составляет 5% от общей суммы сопротивления.
Способ реализуется следующим образом. В результате замера функциональной характеристики датчика ее отклонение от требуемой может иметь вид, представленный на фиг.3 (а-г). Случаи, когда отклонение характеристики имеет место только в начале или только в конце хода контактного узла датчика как более простые ситуации, на фиг.3 не представлены.
Корректировка характеристики может быть осуществлена путем изменения величины сопротивления подгоночной секции. Например, для случая, представленного на фиг.3а требуется уменьшить величину сопротивления резистора R1, подключенного к начальной точке резистора R2, а сопротивление резистора R3, подключенного к конечной точке резистора R2 - увеличить. Требуемые направления подгонки резисторов R1 и R3 для рассматриваемых ситуаций представлены в таблице.
Подгонка в сторону увеличения сопротивления осуществляется следующим образом. Разрядный электрод устанавливается сверху на расстоянии 0,5-1,0 мм от подгоняемого резистора. На него подаются высоковольтные импульсы амплитудой 5-10 кВ с частотой следования 10-20 кГц. В результате формируется мощный разряд в виде плазменного шнура, прикладываемый к локальной точке резистора, что приводит к разрушению резистивной пленки и возрастанию сопротивления резистора.
При подгонке в сторону уменьшения сопротивления расстояние электрод - резистор увеличивают до 2-4 мм, а частоту следования разрядных импульсов уменьшают до 3-5 кГц. В результате электроискровой разряд распадается на множество каналов, хаотично перемещающихся по поверхности резистора в пределах некоторой окружности, диаметр которой возрастает с увеличением расстояния электрод - резистор. Мощность разряда в единичном канале не достаточна для разрушения резистивной пленки, но при этом из-за структурных изменений в пленке удельное сопротивление в зоне обработки уменьшается, что приводит к уменьшению сопротивления резистора.
Для используемых в конструкции датчика резистивных материалов возможно изменение сопротивления резисторов на 10-15% в сторону уменьшения и на 40-50% в сторону увеличения сопротивления.
Требуемая в каждом конкретном случае величина изменения сопротивления резисторов подгоночных секций определяется для крайних положений ползунка датчика пропорционально отклонению от необходимой характеристики.
Для реализации способа служит устройство, представленное на фиг.4.
Подложка П датчика с расположенными на ней резисторами R1, R2, R3 посредством контактных площадок 1 и 2 подключается к блоку опорного напряжения. С контактной площадки 3 снимается сигнал для замера характеристики и для управления процессом подгонки. Сигнал на контактную площадку 3 поступает с контактной пары КП датчика, перемещение которой осуществляется посредством привода датчика. Блок опорного напряжения формирует напряжение 5 В для измерения характеристики и пороговые напряжения U10B, U10Н, U20B, U20H для компараторов К1, К2, К3, К4. Уровни опорных напряжений формируются в зависимости от суммарной величины сопротивлений посредством аналого-цифрового преобразователя АЦП, на вход которого подается напряжение разбаланса моста, образованного последовательно включенными резисторами подложки и образцовым резистором R0, a сигнал с выхода которого подается на блок опорного напряжения. Компараторы К1 и К2 служат для выработки управляющих сигналов при подгонке резистора R1. Подаваемое на них пороговое напряжение соответствует верхней и нижней границам допуска на функциональную характеристику при крайнем левом положении контактной пары КП.
Компараторы К3 и К4 служат для выработки управляющих сигналов при подгонке резистора R3. Подаваемое на них пороговое напряжение соответствует верхней и нижней границам допуска на функциональную характеристику при крайнем правом положении контактной пары КП. Опорное напряжение на компараторы К1 и К3 подается на инверсные входы, а на компараторы К2 и К4 - на прямые.
Сигналы с выхода компараторов поступают на один из входов И элемента 2-2И-2ИЛИ-НЕ, на второй вход которых подаются сигналы с генератора низкой частоты ГНЧ или генератора высокой частоты ГВЧ, причем сигналы с ГНЧ подаются на совместные входы И с компараторами К1 и К3, а сигналы с ГВЧ - на совместные входы И с компараторами К2 и К4. Сигнал с выхода первого (верхнего по фиг. 4) элемента 2-2И-2ИЛИ-НЕ поступает на вход первого высоковольтного преобразователя ВВП1, с выхода которого сигнал с амплитудой в несколько киловольт поступает на первый разрядный электрод Э1, закрепленный на приводе электрода ПЭ1. Вход привода электрода ПЭ1 соединен с выходом компаратора К2. Сигнал с выхода второго (нижнего по фиг.5) элемента 2-2И-2ИЛИ-НЕ поступает на вход второго высоковольтного преобразователя ВВП2, с выхода которого сигнал поступает на второй разрядный электрод Э2, закрепленный на приводе электрода ПЭ2. Вход привода электрода ПЭ2 соединен с выходом компаратора К3.
Сигнал с контактной площадки 3 подложки датчика через переключатель SA1 поступает в режиме замера на блок замера и хранения характеристики, который имеет двустороннюю связь с блоком управления. Блок управления управляет приводом датчика, установкой опорных напряжений, синхронизирует процесс замера характеристики и перемещения контактной пары, выдает сигнал об окончании работы при нахождении характеристики в заданных пределах.
Рассмотрим работу устройства для случая, представленного на фиг.3а. При разомкнутом переключателе SA2 с контактной площадки 2 подложки датчика снимается напряжение, которое после преобразования в АЦП и поступления управляющего кода в блок опорного напряжения служит для формирования опорных напряжений U10B, U10H, U20B, U20H, которые соответствуют верхней (U10B и U20B) и нижней (U10H и U20H) границе допуска на функциональную характеристику датчика в крайнем левом и в крайнем правом положении.
Блок управления переводит контактную пару КП в крайнее левое положение, а переключатель SA1 устанавливается в положение корректировки "К". Реле Р1 своими контактами соединяет выход верхнего элемента 2-2И-2ИЛИ-НЕ с входом ВВП1. На инверсный вход компаратора К1 поступит опорное напряжение U10В, а на прямой - напряжение с контакта 3 датчика. Так как это напряжение выше, чем U10B, то на выходе компаратора К1 будет сигнал высокого уровня. Этот сигнал поступает на привод электрода ПЭ1, в результате чего тот установит электрод Э1 в верхнем положении, и на один из входов И первого элемента 2-2И-2ИЛИ-НЕ. На второй вход И этого элемента поступает сигнал с генератора низкой частоты.
На выходе компаратора К2 в это время будет низкий уровень сигнала, так как напряжение на его прямом входе ниже, чем на инверсном. Сигнал низкого уровня с этого компаратора блокирует прохождение сигналов с генератора высокой частоты ГВЧ, в результате на вход высоковольтного преобразователя ВВП1 поступят сигналы низкой частоты. С выхода ВВП1 высоковольтные импульсы поступают на разрядный электрод Э1. Воздействие разрядных импульсов на резистор R1 приведет к уменьшению его сопротивления, что в свою очередь приведет к снижению левой ветви характеристики, показанной на фиг.3а. Если напряжение, снимаемое с контактной площадки 3, станет меньше U10B, что соответствует вхождению этой части характеристики в допуск, компаратор К1 переключится, на его выходе установится низкий уровень сигнала и прохождение сигналов на ВВП1 прекратится.
Для корректировки характеристики в правой части блок управления посредством привода датчика переводит контактную пару в крайнее правое положение и переключает реле Р1, в результате контакты К1.1 размыкаются, а К1.2 - замыкаются. На инверсный вход компаратора К3 поступит опорное напряжение U20B, а на прямой - напряжение с контакта 3 датчика. Так как это напряжение ниже, чем U20B, то на выходе компаратора К3 будет сигнал низкого уровня. Этот сигнал поступает на привод электрода ПЭ2, в результате чего тот установит электрод Э2 в нижнем положении, и на один из входов И первого элемента 2-2И-2ИЛИ-НЕ, что приведет к блокировке прохождения сигналов низкой частоты с ГНЧ этого элемента.
На выходе компаратора К4 в это время будет высокий уровень сигнала, так как напряжение на его прямом входе выше, чем на инверсном. Сигнал высокого уровня с этого компаратора разрешает прохождение сигналов с генератора высокой частоты ГВЧ, в результате на вход высоковольтного преобразователя ВВП2 поступят сигналы высокой частоты. С выхода ВВП2 высоковольтные импульсы поступают на разрядный электрод Э2. Воздействие высокочастотных разрядных импульсов на резистор R3 приведет к увеличению его сопротивления, что в свою очередь приведет к повышению правой ветви характеристики, показанной на фиг. 3а. Если напряжение, снимаемое с контактной площадки 3, станет больше U20B, что соответствует вхождению этой части характеристики в допуск, компаратор К4 переключится, на его выходе установится низкий уровень сигнала и прохождение сигналов на ВВП2 прекратится.
Аналогичным образом может быть рассмотрена работа устройства при корректировке функциональной характеристики, представленной на фиг.3 б-г.
Предлагаемый способ обеспечения линейной функциональной характеристики датчика угла поворота резисторного типа позволяет повысить выход годных изделий на 15-20%.



Использование: в микроэлектронике и электронной технике, в частности в технологических процессах изготовления пленочных резисторов. Способ корректировки линейной характеристики датчика угла поворота резисторного типа основан на электроискровом воздействии на подгоночные секции. В зависимости от измеренной первоначально и подлежащей корректировке функциональной характеристики датчика производится выбор направления подгонки его секций в сторону увеличения или уменьшения сопротивления и степень изменения их сопротивления. Подгонка в сторону увеличения сопротивления производится электроискровым разрядом при частоте следования разрядных импульсов 10-20 кГц и расстоянии электрод - резистор в пределах 0,5-1,0 мм. Подгонка в сторону уменьшения сопротивления производится электроискровым разрядом с частотой следования разрядных импульсов 3-5 кГц при расстоянии электрод - резистор 2-4 мм. Технический результат заключается в повышении выхода годных датчиков на 15-20%. 4 ил., 1 табл.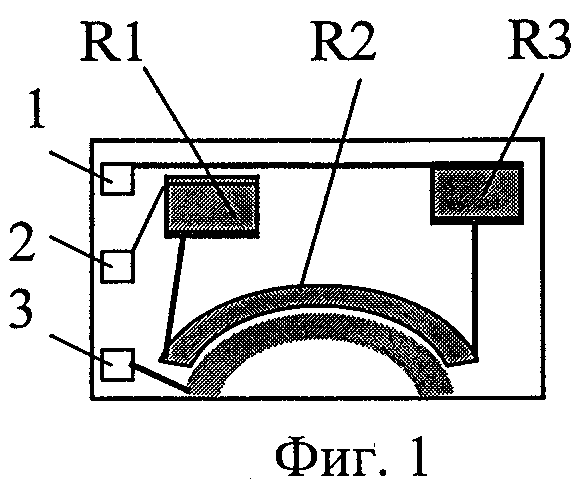
Способ корректировки характеристики датчика угла поворота резисторного типа с двумя подгоночными секциями, выполненными в виде пленочных резисторов, включенных последовательно к начальной и конечной точкам пленочного резистора указанного датчика и установленных вместе с ним на подложке, основанный на изменении величины сопротивления пленочных резисторов подгоночных секций электроискровым воздействием на них, отличающийся тем, что в зависимости от измеренной первоначально и необходимой корректировки характеристики датчика выбирают направление подгонки сопротивления пленочных резисторов подгоночных секций в сторону увеличения или уменьшения их сопротивления и степени изменения их сопротивления, при этом подгонка в сторону увеличения сопротивления пленочных резисторов подгоночных секций осуществляется разрядными импульсами электроискрового воздействия амплитудой 5-10 кВ с частотой их следования 10-20 кГц при установке разрядного электрода сверху на расстоянии 0,5-1,0 мм от пленочного резистора подгоночной секции, а подгонка в сторону уменьшения сопротивления пленочного резистора подгоночных секций осуществляется разрядными импульсами электроискрового воздействия амплитудой 5-10 кВ с частотой их следования 3-5 кГц при установке разрядного электрода сверху на расстоянии 2-4 мм от пленочного резистора подгоночной секции.
| ПРЕОБРАЗОВАТЕЛЬ КОД-НАПРЯЖЕНИЕ | 1966 |
|
SU224922A1 |
| СПОСОБ ПОДГОНКИ ВЕЛИЧИНЫ СОПРОТИВЛЕНИЯ ПЛЕНОЧНЫХ РЕЗИСТОРОВ | 1999 |
|
RU2158979C1 |
| Способ изготовления резисторов | 1980 |
|
SU1051591A1 |
| SU 1549386 А1, 10.01.1996 | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
