Предлагаемое изобретение относится к области электротехники и может быть использовано для управления электродвигателем постоянного тока.
Известна система регулирования тока электродвигателя [1, стр. 18], содержащая последовательно соединенные источник питания, фильтр, импульсный усилитель мощности с силовыми ключами, двигатель, с первым входом компаратора, выход компаратора соединен с входом распределителя импульсов, выход которого подключен к управляющим входам импульсного усилителя мощности, последовательно включенные блок задания тока и усилитель сигнала заданного тока, выход которого соединен со вторым входом компаратора.
Однако в указанной системе имеет место ошибка между заданным и реальным средним значением тока, кроме того, в данной системе, вследствие изменения противоЭДС двигателя в динамических режимах, в широких пределах изменяется частота коммутации силовых ключей преобразователя, что приводит к дополнительным потерям на коммутацию и большому нагреву транзисторов.
Кроме того, известна система регулирования тока электродвигателя [2], являющаяся прототипом предлагаемого изобретения и содержащая последовательно соединенные источник питания, регулируемый источник напряжения, фильтр, импульсный усилитель мощности с силовыми ключами, двигатель, датчик тока, усилитель сигнала датчика тока, выход которого соединен с первым входом компаратора, выход компаратора соединен с входом распределителя импульсов, выход которого подключен к управляющим входам импульсного усилителя мощности, последовательно включенные блок задания тока и усилитель сигнала заданного тока, выход которого соединен со вторым входом компаратора, последовательно соединенные сумматор, регулятор частоты, формирователь задающего напряжения, выход которого соединен с входом задания напряжения регулируемого источника напряжения, блок задания частоты, выход которого соединен со вторым входом сумматора, первый вход которого соединен с выходом преобразователя частота-напряжение, вход которого подключен к выходу компаратора. Указанная система устраняет один из недостатков предыдущей, а именно обеспечивает постоянство частоты коммутации силовых ключей преобразователя.
Однако указанная система, также как и предыдущая не обеспечивает равенства между заданным и реальным значением тока, что приводит к появлению ошибки регулирования и ухудшает точность регулирования тока электродвигателя.
Приведем доказательство наличия ошибки между заданным и истинным значением среднего тока якоря электродвигателя в прототипе. Реальное среднее значение тока составляет в относительных единицах [3]:
ρiср = kф(2γ-1) (1)
где
icp - средний ток якоря электродвигателя;
кф - коэффициент форсировки напряжения на обмотке якоря;
ρ - относительное сопротивление;
γ - скважность напряжения на обмотке якоря.
Известны зависимости скважности и частоты коммутации силовых ключей от напряжения задания Uз [4].

где
ΔU - ширина петли гистерезиса компаратора;
Tя - постоянная времени обмотки якоря;
e - относительное значение ЭДС двигателя.
Откуда можно получить следующие выражения, связывающие заданное и реальное среднее значение тока:
Таким образом, реально между заданным и средним током существует ошибка:
Действительно, исследования показали, что при любых Uз, отличных от нуля (γ = 0,5), реально в системе регулирования тока электродвигателя между средним и заданным значением тока якоря существует ошибка, величина которой растет с увеличением Uз и зависит также от ширины петли гистерезиса компаратора.
Так, анализ (5) показал, что ошибка может составлять 0,3...3% от заданного, при изменении ΔU в пределах 0,01-0,1 Uн соответственно. Такая ошибка может оказаться недопустимой в электроприводах ряда измерительных установок, требующих прецизионной точности.
Анализ приведенного уровня техники свидетельствует о том, что задачей изобретения является создание системы с повышенной точностью регулирования тока якоря электродвигателя, за счет устранения ошибки между заданным и реальным средним значением тока.
Это достигается тем, что в известную систему регулирования тока, содержащую последовательно соединенные источник питания, регулируемый источник напряжения, фильтр, импульсный усилитель мощности с силовыми ключами, двигатель, датчик тока, усилитель сигнала датчика тока, выход которого соединен с первым входом компаратора, выход компаратора соединен со входом распределителя импульсов, выход которого подключен к управляющим входам импульсного усилителя мощности, последовательно включенные блок задания тока и усилитель сигнала заданного тока, последовательно соединенные первый сумматор, регулятор частоты, формирователь задающего напряжения, выход которого соединен с входом задания напряжения регулируемого источника напряжения, блок задания частоты, выход которого соединен со вторым входом первого сумматора, первый вход которого соединен с выходом преобразователя частота напряжения, вход которого подключен к выходу компаратора, введены устройство выделения среднего тока, второй и третий сумматоры и регулятор ошибки среднего тока, причем вход устройства выделения среднего тока соединен с выходом усилителя сигнала датчика тока, выход устройства выделения среднего тока соединен с первым входом второго сумматора, второй вход которого соединен с выходом блока задания тока, выход второго сумматора соединен с аналоговым входом регулятора ошибки среднего тока, логический вход регулятора ошибки среднего тока соединен с выходом блока задания тока, выход регулятора ошибки среднего тока соединен с первым входом третьего сумматора, второй вход которого соединен с выходом усилителя сигнала заданного тока, выход третьего сумматора соединен с вторым входом компаратора.
На фиг. 1 приведена функциональная схема предлагаемой системы.
На фиг. 1 приведена функциональная схема регулятора ошибки среднего тока.
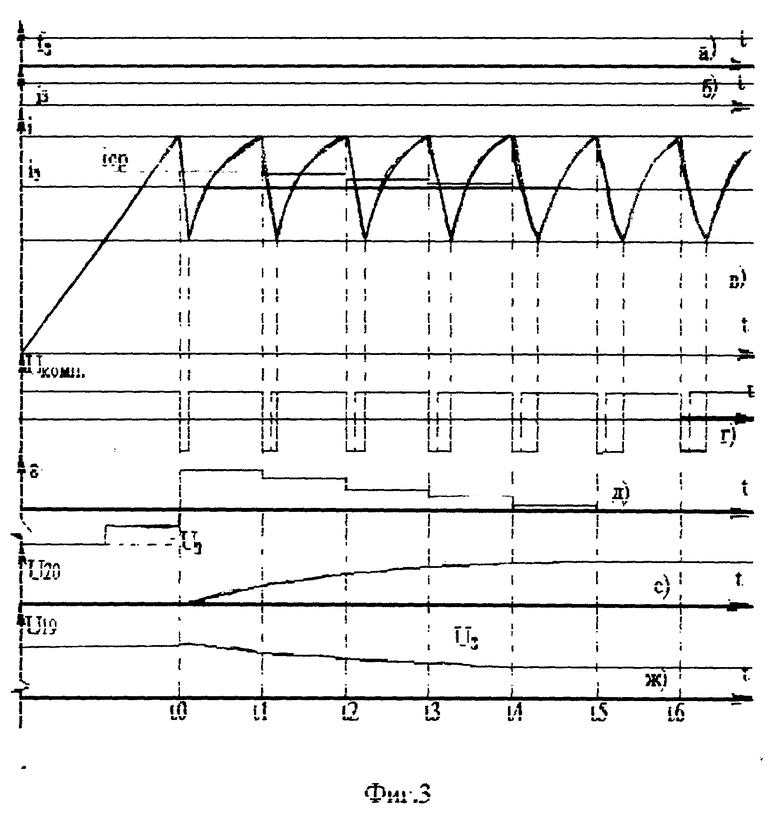
На фиг. 3 приведены диаграммы, поясняющие работу предлагаемой системы.
Предлагаемая прецизионная система регулирования тока электродвигателя (фиг. 1) содержит последовательно соединенные источник питания (ИП) 1, регулируемый источник напряжения (РИН) 2, фильтр (Ф) 3, импульсный усилитель мощности (ИУМ) 4 с силовыми ключами, двигатель (Д) 5, датчик тока (ДТ) 5, усилитель сигнала датчика тока (УСДТ) 7, выход которого соединен с первым входом компаратора (К) 8, выход компаратора соединен со входом распределителя импульсов (РИ) 9, выход которого подключен к управляющим входам импульсного усилителя мощности (ИУМ) 4, последовательно включенные блок задания тока (БЗТ) 10 и усилитель сигнала заданного тока (УСЗТ) 11, последовательно соединенные первый сумматор (С1) 13, регулятор частоты (РЧ) 14, формирователь задающего напряжения (ФЗН) 15, выход которого соединен с входом задания напряжения регулируемого источника напряжения (РИН) 2, блок задания частоты (БЗЧ) 16, выход которого соединен со вторым входом первого сумматора (С1) 13, первый вход которого соединен с выходом преобразователя частота-напряжение (ПЧН) 12, вход которого подключен к выходу компаратора (К) 8, устройство выделения среднего тока (УВСТ) 17, второй (С2) 18 и третий (С3) 19 сумматоры и регулятор ошибки среднего тока (РОСТ) 20, причем вход устройства выделения среднего тока (УВСТ) 17 соединен с выходом усилителя сигнала датчика тока (УСДТ) 7, выход устройства выделения среднего тока (УВСТ) 17 соединен с первым входом второго сумматора (С2) 18, второй вход которого соединен с выходом блока задания тока (БЗТ) 10, выход второго сумматора (С2) 18 соединен с аналоговым входом регулятора ошибки среднего тока (РОСТ) 20, логический вход регулятора ошибки среднего тока (РОСТ) 20 соединен с выходом блока задания тока (БЗТ) 10, выход регулятора ошибки среднего тока (РОСТ) 20 соединен с первым входом третьего сумматора (С3) 19, второй вход которого соединен с выходом усилителя сигнала заданного тока (УСЗТ) 11, выход третьего сумматора (С3) 19 соединен с вторым входом компаратора (К) 8.
В качестве источника питания 1 может быть использована классическая схема: трансформатор-выпрямитель-фильтр, приведенная, например, в [5, рис. 2.2, стр. 26], Трансформатор - типа ТПП-273, выпрямительные диоды - Д-246Д, конденсаторы - К-50-17.
Регулируемый источник напряжения 2 служит для формирования различного по амплитуде питающего напряжения нагрузки. Регулируемый источник напряжения 2 может быть выполнен по схеме [5, рис. 8.2, стр. 153], с соответствующим выбором типов и номиналов комплектующих элементов, входящих в источник питания, причем, вход задания напряжения регулируемого источника напряжения 2 подается на вывод 3 микросхемы А2 (140УД6А), вместо постоянного задающего сигнала, поступающего с потенциометра.
Фильтр 3 служит для сглаживания выходного напряжения регулируемого источника напряжения 2 и может быть построен по схеме [5, рис. 8.2, стр. 153]. В качестве дросселя использован дроссель типа Д13, а конденсаторы К50-29-1000 мкФ 63В.
Импульсный усилитель мощности 4 предназначен для формирования импульсного напряжения питания нагрузки и может быть построен по схеме, приведенной в [1, стр. 18] на транзисторах КТ818Г, КТ819Г.
В качестве нагрузки 5 использован стандартный электродвигатель постоянного тока ЭДН-145Р, независимого возбуждения.
Датчик тока 6 служит для преобразования тока электродвигателя 5 в пропорциональное напряжение. Датчик тока 6 может быть реализован на прецизионном резисторе С5-16МВ-0.1 Ом±1% (соответствующей мощности) по схеме включения [1, стр. 18].
Усилитель сигнала датчика тока 7 служит для усиления по напряжению выхода датчика тока 6 и согласования входного и выходного сопротивления нагрузки и может быть реализован на микросхеме 544 УД2А по схеме, показанной, например, в [1, стр. 18].
Компаратор 8 служит для сравнения сигнала с выхода усилителя 7 с опорным (задающим) сигналом. Схема включения компаратора может быть заимствована из [1, стр. 18] и реализована на микросхеме 140УД6А.
Распределитель импульсов 9 служит для формирования управляющих сигналов силовыми ключами импульсного усилителя мощности 4 и может быть реализован, например, на микросхеме 155ЛА3, транзисторах КТ 816Г, КТ 817Г по схеме, приведенной в [1, стр. 18].
Блок задания тока 10 служит для формирования задающего сигнала, пропорционального току нагрузки, и может быть выполнен в виде потенциометра СП5-3В24,7кОм-1Вт±5% по схеме, показанной в [6, рис. 2. 12а, 54].
Усилитель сигнала задающего тока 11 служит для усиления по напряжению сигнала заданного тока и согласования входного и выходного импеданса и может быть реализован, например, на микросхеме 140 УД6А по схеме включения [7, рис. 3.4, стр. 158].
Преобразователь частота-напряжение 12 служит для формирования напряжения, пропорционального частоте переключений компаратора 8, и, следовательно, частоте переключений силовых ключей импульсного усилителя мощности 4. Преобразователь частота-напряжение 12 может быть реализован на микросхеме КР1108ПП1А по схеме включения, приведенной в [8, стр. 369].
Первый сумматор 13 предназначен для получения разности между заданным и истинным напряжением, пропорциональным частоте переключения силовых ключей импульсного усилителя мощности 4, и может быть выполнен, например, по схеме суммирующего усилителя [7, рис. 3.18, стр. 166], на микросхеме 140УД6А.
Регулятор частоты 14 предназначен для формирования сигнала, пропорционального интегралу от выходного напряжения сумматора 13 (следует отметить, что данный регулятор может быть построен и по другому принципу). Регулятор частоты 14 можно реализовать на микросхеме 140УД6А по схеме, приведенной в [7, рис. 3.43, стр. 207].
Формирователь задающего напряжения 15 предназначен для согласования напряжений и токов между регулятором 14 и входом задания регулируемого источника 2, и может быть реализован согласно [7, рис. 3.8, стр. 160] на микросхеме 140УД6А в виде аналогового повторителя с большим входным и малым выходным сопротивлением.
Блок заданная частоты 16 предназначен для формирования напряжения, пропорционального заданной частоте переключений силовых ключей усилителя мощности 4 и может быть выполнен в виде потенциометра Сп-3В-4,7кОм-1Вт±5% по схеме, приведенной в [6, рис. 2.12а, стр. 54].
Устройство выделения среднего тока 17 предназначено для формирования напряжения, пропорционального истинному значению среднего тока якоря электродвигателя 5, причем мгновенное значение тока подается на него с усилителя сигнала датчика тока 7. Устройство выделения среднего тока может быть реализовано согласно [9, рис. 2.57, стр. 93]. В качестве комплектующих элементов могут быть приняты: микросхема 140УД6А, транзисторы КТ361Г, КТ315Г, диоды КД521Б и конденсаторы КМ6Б.
Второй сумматор 18 предназначен для получения разницы между заданным и истинным значением среднего тока якоря электродвигателя, и может быть выполнен, например, по схеме суммирующего усилителя [7, рис. 3.18, стр.166], на микросхеме 140УД6А.
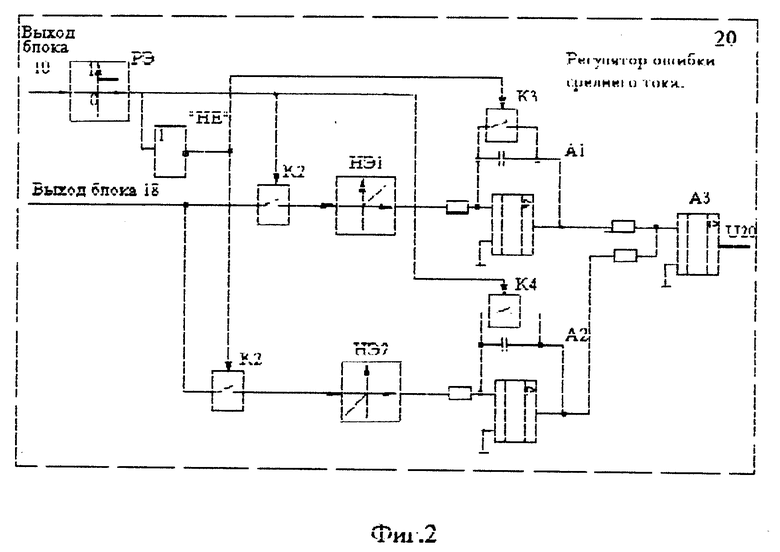
Регулятор ошибки среднего тока 20 предназначен для формирования сигнала, пропорционального интегралу от выходного напряжения сумматора 18 в квазиустановившемся режиме работы системы регулирования тока. Функциональная схема одного из возможных вариантов выполнения регулятора ошибки среднего тока представлена на фиг. 2.
Регулятор ошибки среднего тока включает в себя релейный элемент РЭ, инвертор (элемент "НЕ"), два нелинейных элемента НЭ1, НЭ2, два операционных усилителя, собранных по принципу интегрального регулятора А1, А2, сумматор А3 и четыре коммутатора аналогового сигнала К1, К2, К3, К4. Причем на вход релейного элемента подан сигнал с блока задания тока. Выход РЭ подан на элемент "НЕ", где происходит инвертирование сигнала с выхода РЭ, а также является логическим сигналом на переключение коммутаторов К1, К4. Выход инвертора является логическим сигналом на переключение коммутаторов К2, К3. На входы аналоговых коммутаторов К1, К2 поступает сигнал с выхода второго сумматора 18, пропорциональный ошибке между заданным и реальным средним значением тока якоря. Выход первого коммутатора К1 поступает на вход первого нелинейного элемента НЭ1, а выход второго коммутатора К2 на вход второго нелинейного элемента НЭ2. Выходы нелинейных элементов НЭ1, НЭ2 подключены к входам интегральных регуляторов А1 и А2 соответственно, выходы интегральных регуляторов суммируются на сумматоре А3. Коммутаторы К3, К4 включены параллельно интегрирующим цепочкам интегральных регуляторов А1 и А2 соответственно.
Интегральные регуляторы А1, А2 можно реализовать на микросхеме 140УД6А по схеме, приведенной в [7, рис. 3.43, стр. 207].
Сумматор А3 можно реализовать по схеме суммирующего усилителя [7, рис. 3.18, стр. 166] на микросхеме 140УД6А.
Инвертор может быть реализован на микросхеме К561ЛН2.
Релейный элемент предназначен для формирования логического сигнала, несущего информацию о полярности заданного тока. Положительной полярности заданного тока соответствует сигнал логической "1", а отрицательной полярности заданного тока логический "0". Релейный элемент представляет собой компаратор [1, стр. 18] и реализован на микросхеме 140УД6А.
Коммутаторы аналогового сигнала К1, К2 предназначены для селекции каналов интегрирования в соответствии с выбранной полярностью заданного тока по логическому сигналу с выхода релейного элемента: при положительной полярности заданного тока сигнал, пропорциональный ошибке среднего тока, поступает (через НЭ1) на первый интегральный регулятор А1, а при отрицательной (через НЭ2) на второй А2.
Коммутаторы аналогового сигнала К3, К4 служат для обнуления интеграторов А1, А2 соответственно.
Коммутаторы К1, К2, К3, К4 могут быть реализованы на стандартных микросхемах логических ключей 564КТ3 [10].
Нелинейные элементы НЭ1, НЭ2 служат для обеспечения нулевого сигнала на входах интегральных регуляторов А1, А2 соответственно в динамических режимах изменения тока якоря и могут быть реализованы диодах Д521Б.
Третий сумматор 19 предназначен для получения разницы между сигналами задания среднего тока с выхода усилителя сигнала заданного тока 11 и сигналом равным интегралу ошибки с выхода регулятора ошибки среднего тока 20, и может быть выполнен, например, по схеме суммирующего усилителя [7, рис. 3.18,стр. 166], на микросхеме 140УД6А.
Система работает следующим образом. При подаче сигналов задания тока и частоты из блоков задания тока 10 и частоты 16 соответственно (фиг. 3 а, б) начинается процесс роста тока якоря электродвигателя (фиг. 3в). На второй отрицательный вход второго сумматора 18 при этом поступает сигнал задающего напряжения Uз. Устройство выделения среднего тока 17 выдает сигнал, пропорциональный среднему току якоря электродвигателя 5, с задержкой, равной заданному в блоке задания частоты 16 периоду коммутации T=1/fз. Поэтому в первый момент времени на выходе второго сумматора 18, где формируется сигнал, пропорциональный ошибке среднего тока якоря электродвигателя 5 ε, появляется максимальный отрицательный сигнал равный напряжению задания -Uз (фиг. 3д; интервал T). По истечении времени, равного заданному периоду коммутации, устройство выделения среднего тока 17 выдает сигнал, пропорциональный среднему току, который поступает на первый положительный вход второго сумматора 18, что приводит к снижению по модулю сигнала на его выходе (фиг. 3 д; t0). Однако все это время сигнал с выхода второго сумматора остается отрицательным. Так как сигнал с выхода блока задания тока положительный, то коммутатор аналогового сигнала К1 подключает первый канал интегрирования ошибки среднего тока (НЭ1, А1; см. фиг. 2), а отрицательный сигнал на вход интегратора А1 не проходит. На выходе регулятора ошибки среднего тока 20 в течение всего времени процесса роста тока сохраняется нулевой уровень (фиг. 3 e; t0). Таким образом, предлагаемое построение регулятора ошибки среднего тока позволяет исключить влияние работы контура регулирования ошибки на динамику системы регулирования тока, то есть обеспечивает его работу лишь в квазиустановившемся режиме.
Контур частоты в это время работает следующим образом. Так как компаратор 8 не переключается, то на выходе преобразователя частота-напряжение формируется нулевой сигнал. Сумматор 13 формирует разность напряжений блоков 16 и 12, которая в данный момент времени максимальна. Регулятор частоты 14 начинает накапливать ошибку, на выходе фильтра 3 формируется питающее напряжение импульсного усилителя мощности 4.
Распределитель импульсов 9 по единичному логическому сигналу с выхода 8 открывает соответствующие силовые ключи 4. Происходит процесс роста тока якоря электродвигателя.
При достижении током верхней границы "трубки" происходит "опрокидывание" компаратора 8 (фиг. 3 г; t0). Напряжение на выходе импульсного усилителя мощности 4 продолжает увеличиваться, частота переключений компаратора 8 также растет. Ошибка на выходе сумматора 13 уменьшается, но частота продолжает расти, так как ЭДС мала. Продолжающийся процесс роста частоты переключений компаратора 8 приводит к отрицательной ошибке на выходе сумматора 13 и уменьшению напряжения на выходе блока 14. При достижении заданной частоты ошибка на выходе сумматора 13 равна нулю. Дальнейший рост ЭДС приводит к появлению положительной ошибки на выходе сумматора 13 и возрастанию напряжения якоря через импульсный усилитель мощности 4, что компенсирует возросшую ЭДС и обеспечивает режим стабилизации частоты. Контур стабилизации частоты выполнен более быстродействующим, чем контур регулирования ошибки среднего значения тока, что позволяет провести анализ их работы раздельно.
Начиная с момента времени t0, средний ток ярости, определяемый устройством выделения среднего тока 17, оказывается выше заданного тока на выходе блока задания тока 10. (При задании максимального тока эта ошибка составляет ширину петли гистерезиса компаратора ΔU , лишь при нулевом токе задания ошибка равна нулю). Поэтому на выходе второго сумматора 18 появляется положительный сигнал, пропорциональный ошибке среднего тока ε (фиг. 3 д; t0-t1). Регулятор ошибки среднего тока 20 начинает интегрировать (фиг. 3 e, t0-t1). Напряжение на выходе третьего сумматора 19 начинает несколько уменьшаться (фиг. 3 ж; t1-t2):
U19 = Uз - U20,
U20 - напряжение на выходе регулятора ошибки среднего тока 20.
U19 - напряжение на выходе третьего сумматора 19.
Уменьшение уровня сигнала с выхода третьего сумматора 19, то есть задающего сигнала на втором входе компаратора 8, приводит к некоторому снижению скважности напряжения на выходе компаратора 8 (фиг. 3 г; t1-t2), что приводит к уменьшению среднего значения тока якоря электродвигателя 5 (фиг. 3в; t2-t3). Это, в свою очередь, приводит (с ошибкой на заданный период коммутации) к изменению сигнала ошибки на выходе второго сумматора 18. Этот сигнал снижается, но по- прежнему остается положительным (фиг. 3 е; t2-t3), благодаря чему рост напряжения на выходе регулятора ошибки среднего тока 20 продолжается, хотя и с несколько меньшим темпом (фиг. 3е; t2-t3). Сигнал на выходе третьего сумматора 19 в свою очередь снижается (фиг. 3ж; t2-t3). Процесс продолжается до тех пор, пока средний ток якоря двигателя не станет равным заданному току, то есть, не станет равной нулю ошибка (фиг. 3 в, д; t5-t6).
Таким образом, по сравнению с прототипом, прецизионная система регулирования тока электродвигателя полностью устраняет ошибку между заданным и реальным средним значением тока якоря электродвигателя, за счет чего точность регулирования тока повышается на 0,3...3% (в зависимости от величины петли гистерезиса компаратора и заданного значения тока), вместе с тем система обеспечивает те же динамические свойства и постоянство частоты переключений силовых ключей как и в прототипе. Факт работоспособности данной прецизионной системы регулирования тока электродвигателя и эффективности повышения точности регулирования тока подтвержден результатами моделирования системы.
Источники информации
1. Двухзонные следящие системы. / В.В. Шеваль, В.И. Дорохов, С.А. Исаков. - Энергоатомиздат, 1984. - Б-ка по автоматике: вып. 646.
2. А.С. N 1705995. Кромм А.А., Симаков Г.М. Елисеенко О.Ю.
3. Глазенко Т. А. Полупроводниковые преобразователи в электроприводах постоянного тока. - Л.: Энергия 1973, с. 285.
4. Симаков Г. М., Кромм А.А. "Об одном способе управления быстродействующим позиционным микроэлектроприводом постоянного тока. Автоматизированный электропривод промышленных установок. Новосибирск: 1990.
5. Источники вторичного питания с бестрансформаторным входом/ А.А. Бас, В.П. Миловзоров, А.К. Мусолин. - М.: Радио и связь, 1987, с. 160.
6. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. - Л.: Энергоиздат. Ленингр. отд-ние, 1982, с. 392.
7. Хорвиц П., Хилл У., Искусство схемотехники: В 2-х томах, пер. с англ. - М.: Мир, 1983, т. 1, с. 598.
8. Якубовский С.В. Аналоговые и цифровые интегральные микросхемы. Справочное пособие. - М.: Радио и связь, 1984.
9. Волгин Л. И. Измерительные преобразователи переменного напряжения в постоянный. - М.: Сов. радио, 1977, с. 240.
10. Технические Условия на микросхему 564КТ3 бко 347064ТУ20.
Изобретение может быть использовано для управления электродвигателями постоянного тока. В систему регулирования тока электродвигателя вводятся устройство выделения среднего тока, второй и третий сумматоры и регулятор ошибки среднего тока. Причем вход устройства выделения среднего тока подключен к выходу усилителя сигнала датчика тока, а выход устройства выделения среднего тока вычитается из сигнала блока задания тока на втором сумматоре. Выход второго сумматора подается на регулятор ошибки среднего тока, а его выход суммируется на третьем сумматоре с выходом усилителя сигнала заданного тока, за счет чего организуется контур регулирования ошибки между заданным и истинным значениями среднего тока. Такое выполнение позволяет обеспечить нулевую ошибку между заданным и истинным средним значениями тока якоря электродвигателя, что повышает точность регулирования тока на 0,3 - 3%. 3 ил.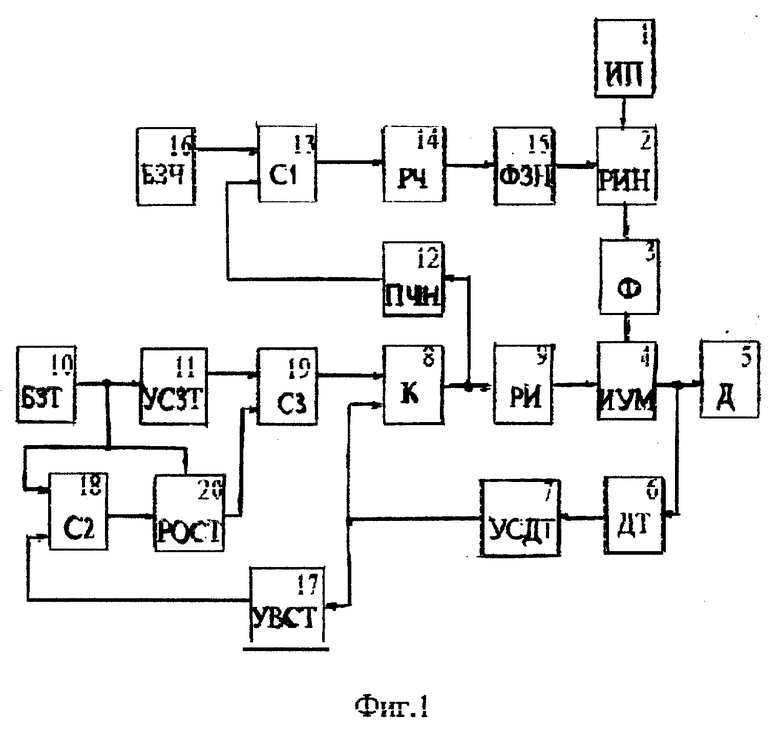
Прецизионная система регулирования электродвигателя, содержащая последовательно соединенный источник питания, регулируемый источник напряжения, фильтр, импульсный усилитель мощности с силовыми ключами, двигатель, датчик тока, усилитель сигнала датчика тока, выход которого соединен с первым входом компаратора, выход компаратора соединен со входом распределителя импульсов, выход которого подключен к управляющим входам импульсного усилителя мощности, последовательно включенные блок задания тока и усилитель сигнала заданного тока, последовательно соединенные первый сумматор, регулятор частоты, формирователь задающего напряжения, выход которого соединен со входом задания напряжения регулируемого источника напряжения, блок задания частоты, выход которого соединен со вторым входом первого сумматора, первый вход которого соединен с выходом преобразователя частота - напряжение, вход которого подключен к выходу компаратора, отличающаяся тем, что в нее введены устройство выделения среднего тока, второй и третий сумматоры и регулятор ошибки среднего тока, причем вход устройства выделения среднего тока соединен с выходом усилителя сигнала датчика тока, выход устройства выделения среднего тока соединен с первым входом второго сумматора, второй вход которого соединен с выходом блока задания тока, выход второго сумматора соединен с аналоговым входом регулятора ошибки среднего тока, логический вход регулятора ошибки среднего тока соединен с выходом блока задания тока, выход регулятора ошибки среднего тока соединен с первым входом третьего сумматора, второй вход которого соединен с выходом усилителя сигнала заданного тока, выход третьего сумматора соединен со вторым входом компаратора.
| Двухпозиционная система регулирования тока электродвигателя | 1990 |
|
SU1705995A1 |
| Электропривод с двухзонным регулированием скорости | 1989 |
|
SU1765877A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1988 |
|
SU1698945A1 |
| В.В.Шеваль и др | |||
| Двухзонные следящие системы | |||
| - М.: Энергоатомиздат, 1984, вып.646, с.18 | |||
| US 3983466 A, 28.09.76 | |||
| СПОСОБ ВЫПЛАВКИ СТАЛИ В ПОДОВОЙ ПЕЧИ | 1998 |
|
RU2140992C1 |
