Изобретение относится к конструкциям ручного переносного инструмента для пережатия металлических трубопроводов, применяемого для устранения аварийных ситуаций, проведения ремонтных работ и функциональных изменений в пневматических и гидравлических контурах космических аппаратов в открытом Космосе.
Известны механические устройства в виде тисков и регулируемых зажимов рычажного, штангового, клинового, эксцентрикового и прочих типов, успешно используемые для фиксации и пережатия труб из сравнительно эластичных полимерных материалов, резины, меди и некоторых марок алюминия. Примером может служить патент США 4046363, МКИ В 25 В 1/14, принятый за аналог, по которому пережатие трубопровода производится двумя рычагами с общей точкой вращения одних концов со сведением других рукояткой с поворотным нажимным роликом, подвижно установленной на одном из рычагов.
Очевидным общим недостатком такого типа устройств и аналога, в частности, является недостаточность развиваемых ими усилий для пережатия трубопроводов из традиционных для КА высокопрочного алюминия и нержавеющей стали или необходимость предварительного подогрева обжимаемых участков трубопроводов до относительно высоких температур, что чаше всего либо недопустимо по требованиям безопасности, либо очень сложно.
Наиболее близким по технической сущности к предложенному устройству, принятым за прототип, является механизм для обжатия и резки труб малого диаметра МРТ-1, представленный в руководящем материале НИАТ N 70103.007, 1965 г. (см. фиг. 1). Прототип представляет собой устройство с пневмогидравлическим приводом. Пневмоцилиндр низкого давления 1, управляемый золотником 2, штоком малого диаметра 10, связанным с поршнем 9, перемещает жидкость в преобразователе давления 3, которая вентильным блоком 4 по рукавам высокого давления 12 поочередно подается в силовые гидроцилиндры 5 левой скобы 6 при обжатии трубопровода или правой скобы 6 при его обрезке. При отсутствии давления в гидроцилиндре возвратная пружина 11 устанавливает пуансон в исходное положение. Обжатие производится на неподвижной матрице 7, закрепленной на скобе 6, подвижным пуансоном 8, а резка - подвижным пуансоном-ножом 13. Передаваемое на скобу 6 усилие достигает 5-7 т, что вполне достаточно для надежного пережатия трубопровода, но при полном снятии пережимного усилия герметичность пережатого участка не гарантируется. Поэтому после пережатия трубопровод подвергается дополнительным операциям - проварке в некотором удалении от места пережатия и отрезке. Масса механизма без учета пневмоисточника - 37 кг, габариты - 890х770х325 мм. Масса сварочного устройства без учета источника питания и систем охлаждения и подачи рабочего тела - 25 кг.
К недостаткам прототипа следует отнести необходимость последующих операций, чреватых опасными последствиями проварки и обрезки части трубопровода на некотором расстоянии от места пережатия, гарантирующих герметичность, внушительные габариты и масса механизма, не говоря уже о сложности организации его работы, и возможность контакта с небезобидным содержимым трубопровода, практически исключающие возможность его использования в условиях на КА.
Любые работы в открытом Космосе усложнены трудностями перемещения и фиксации самого оператора, переноски орудий труда и средств контроля исполнения, кабелей и трубопроводов их питания, необходимостью работать в скафандре, сложностью оборудования КА и визуального контроля из-за чрезвычайно контрастного освещения. Поэтому безопасность и простота работы, надежность и доступность питания являются основными критериями пригодности инструмента для работы на КА.
Таким образом, задача состоит в необходимости создания такой конструкции устройства для пережатия металлических трубопроводов КА, которая, предоставляя возможность безопасной и уверенной работы оператора в скафандре в местах с ограниченными доступом и визуальным контролем операции пережатия функционирующего трубопровода, обеспечила бы требуемую герметичность и необходимую прочность участка трубопровода, пережатого с его помощью без какого-либо термического воздействия непосредственно на трубопровод при одновременном уменьшении габаритов и массы всего устройства и минимальном потреблении энергии для проведения операции пережатия.
Техническим эффектом от решения поставленной задачи явилось создание устройства для пережатия металлических трубопроводов, которое отвечает поставленным требованиям, т.е. обеспечена требуемая герметичность и необходимая прочность участка трубопровода, пережатого с его помощью без какого-либо термического воздействия непосредственно на трубопровод, предоставлена возможность безопасной и уверенной работы оператора в скафандре в местах с ограниченными доступом и визуальным контролем операции пережатия функционирующего трубопровода, при одновременном принципиальном уменьшении габаритов и массы всего устройства и минимальном потреблении энергии для проведения операции пережатия.
Это достигается тем, что в устройстве, содержащем корпус, силовую скобу с матрицей и пуансоном, закрепленным на штоке, связанным через толкатель с силовым приводом, и силовой привод, силовая скоба выполнена в виде отделяемой головки, связанной с корпусом многозаходной трапецеидальной несамотормозящейся резьбой с пропусками для размещения в корпусе управляемых стопоров для резьбы. Силовая скоба снабжена опорной втулкой для силового стопорения штока пуансона и пустотелой осью. Закрепленная на силовой скобе матрица выполнена из пружинящего материала с прогибом в направлении пережимаемого трубопровода, рабочие кромки матрицы и пуансона имеют ограничители остаточной деформации трубопровода в виде плоских обнижений.
Введены силовые С-образные пружинящие стопоры, размещенные в специальной проточке штока пуансона. Силовой привод выполнен в виде набора колец из материала с эффектом памяти формы с установленным на теплопроводящей пасте внутри него электронагревателем и с теплоизоляцией в виде шайб и тонкостенной трубы из термостойкого высокопрочного материала.
Кроме того, введен механизм разделения, состоящий из предохранительной тороидальной пружины, закрепленной в торце толкателя в контакте со штоком пуансона, толкателя, снабженного кромкой взаимодействия с управляемыми стопорами для резьбы, и самих управляемых стопоров. Введены также ряды выступов удержания устройства, равномерно размещенные на внешней поверхности корпуса, и пружинящий фиксатор захвата пережимаемого металлического трубопровода с дужкой, надетый на консоли пустотелой оси силовой скобы, при этом силовая скоба в зоне контактирования с пережимаемым металлическим трубопроводом имеет скошенные боковые поверхности для взаимодействия с пружинящим фиксатором захвата.
Таким образом, масса самого устройства снабжена более чем на 1.5 порядка разделение устройства после обжатия трубопровода позволяет оставить на пережатом участке только отделяемую головку, масса которой составляет лишь 20-25% массы всего устройства, баланс остаточных после обжатия трубопровода и разделения устройства напряжений в корпусе силовой скобы, матрице и пережатом трубпроводе обеспечивает требуемую герметичность пережатого участка трубопровода во всех условиях работы КА и на требуемое время, вместо громоздкой и сложной системы пневмогидравлического привода применен компактный силовой привод с высоким уровнем запаса механической энергии на базе монокристалла с эффектом памяти, для работы которого достаточно бортовой сети электропитания на КА или даже переносного аккумулятора емкостью 12 А•ч.
Наличие теплоизоляторов исключает термическое воздействие на трубопровод силового привода через другие элементы конструкции, т.к. требуемый для обратного мартенситного превращения нагрев силового привода до 180oС, вызывающий срабатывание устройства, сразу прекращается, а последующее разделение устройства и вовсе снимает этот вопрос. Теплоизоляторы, отделяющие силовой привод от остальных элементов конструкции устройства, обеспечивают достаточную равномерность нагрева всех колец набора, а значит и обязательное их срабатывание, пусть даже с разбросом по времени от 0,01 до 2 с. Интегральный эффект выражается элементарным суммированием как перемещений, так и усилий от каждого кольца.
Использование в силовом приводе набора колец вместо сплошной трубы вместе с небольшим проигрышем по длине набора дает значительные технологические преимущества унификации для ряда изделий с аналогичным приводом, контроля их качества, подгонки параметров набора и сборки устройства, в том числе на борту КА, когда сработавший комплект силового привода заменяется свежим, "заряженным" на Земле спустя неограниченное время. Пружинящий фиксатор захвата позволяет свести участие оператора в процессе пережатия металлического трубопровода к поиску нужного участка трубопровода, захвату его зевом силовой скобы, повороту дужки пружинящего фиксатора, включению питания нагревателя и удалению отделившегося корпуса и сыгравшего свою рель пружинящего фиксатора захвата. Все манипуляции с устройством пережатия металлического трубопровода оператор-космонавт может выполнять одной рукой, чему во многом способствуют ряды выступов удержания устройства, создающие эффект прилипания к тканной поверхности рукавицы.
Суть предлагаемого решения поясняется чертежами, представленными на фиг. 2-9.
На фиг.2 приведен общий вид устройства для пережатия;
на фиг.3 показан вид сверху устройства для пережатия;
на фиг.4 отражена фиксация устройства для пережатия на трубопроводе;
на фиг. 5 показан фрагмент сработавшего устройства для пережатия до отделения привода;
на фиг. 6 представлено сечение трубопровода в зоне обжатия;
на фиг.7 показана удерживающая головка устройства для пережатия на трубопроводе после отделения привода;
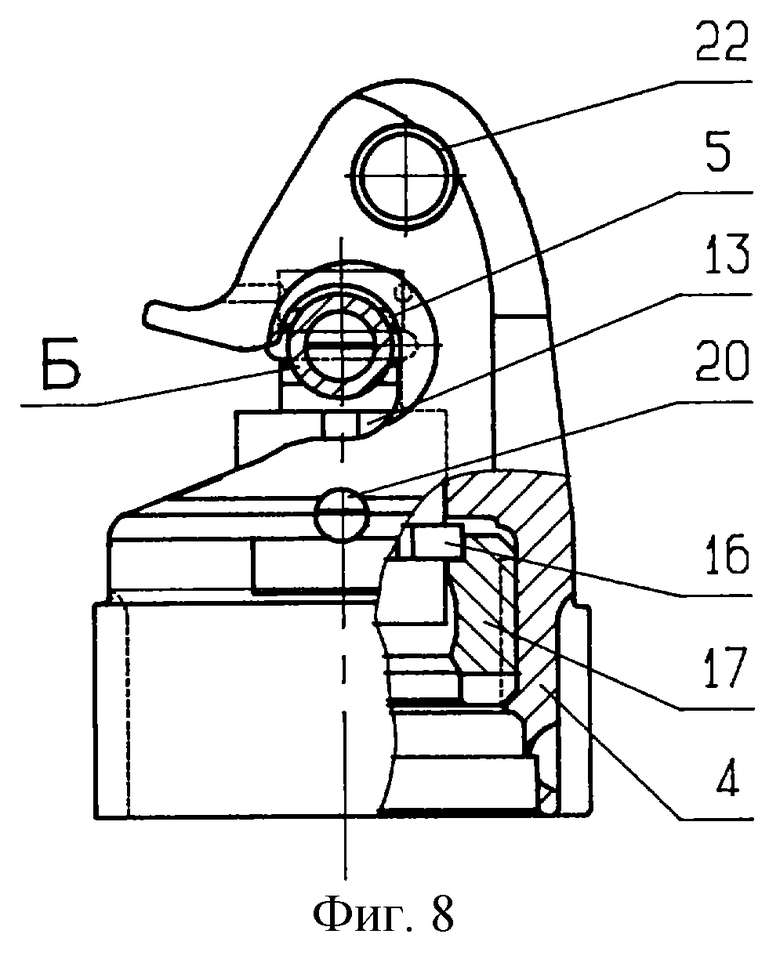
на фиг. 8 показана удерживающая головка устройства для пережатия с входящими деталями на трубопроводе после отделения привода и пружинящего фиксатора захвата;
на фиг.9 показана в плане удерживающая головка устройства для пережатия на трубопроводе после отделения привода и пружинящего фиксатора захвата.
Прописными буквами обозначены характерные зоны и участки деталей устройства: А - зев захвата пережимаемого трубопровода, Б - пережимаемый трубопровод, В - позиционирующая поверхность удерживающей головки, Г - скошенные боковые поверхности удерживающей головки для взаимодействия с пружинящим фиксатором захвата, Д - рабочие кромки матрицы и пуансона, Е - плоские обнижения рабочих кромок матрицы и пуансона, Ж - упор, ограничивающий ход пуансона со штоком, И - зона сочленения корпуса и отделяемой головки, К - поверхность опорной втулки для взаимодействия с силовыми С-образными пружинными фиксаторами, Л - кромка толкателя для отвода шариков управляемых стопоров для резьбы, М - направляющие пазы, Н - петли пружинящего фиксатора захвата для крепления на пустотелой оси удерживающей головки, О - выступы на корпусе, улучшающие фиксацию устройства в руке оператора.
Предлагаемое устройство содержит корпус 1 устройства, дужку 2 фиксатора, пружинящий фиксатор захвата 3, удерживающую головку 4, матрицу 5, электронагреватель 6, силовой привод 7, теплоизоляторы 8, 9 и 10, теплопроводящую пасту 11, толкатель 12, пуансон 13, шток 14, предохранительную тороидальную пружину 15, силовые С-образные пружинные фиксаторы 16, опорную втулку 17, шарики 18 управляемых стопоров для резьбы, управляемые стопоры для резьбы 19, штифты 20, крышку 21 устройства, пустотелую ось фиксатора 22, крышку 23 электронагревателя, провод питания 24 электронагревателя.
Устройство работает следующим образом.
Оператор, удерживая рукой корпус 1 устройства, захватывает зевом А подлежащий пережатию трубопровод Б и большим пальцем отжимает от себя дужку 2 пружинящего фиксатора захвата 3, позиционируя тем самым устройство на нужном месте трубопровода.
При отжатии дужки 2 до упора пружинящий фиксатор захвата 3 прижимает трубопровод к поверхности В удерживающей головки 4 и упругой матрице 5 и самоконтрится трением при поджатии по байонетному типу трубопровода к матрице, обеспечивая перпендикулярность пережимающих элементов устройства оси трубопровода, и дополнительно трением своих упругих концов о скошенные поверхности Г удерживающей головки. Включается питание электронагревателя 6 силового привода 7, выполненного из материала с эффектом памяти формы и отгороженного от остальных элементов конструкции теплоизоляторами 8, 9 и 10, зазор между электронагревателем и трубчатым приводом заполнен теплопроводящей пастой 11, улучшающей быстродействие устройства и снижающей потребление энергии.
При достижении температуры обратных мартенситных превращений силовой привод 7 скачком удлиняется, перемещая с помощью толкателя 12 и штока 14 пуансон 13, пережимающий трубопровод "Б", находящийся на матрице 5; притупленные кромки "Д" матрицы и пуансона трансформируют кольцевое сечение трубопровода в бочкообразное с нулевым радиусом кривизны боковых стенок и утоняют суммарную толщину донных стенок до величины h=0.8•2s, где s толщина стенки трубопровода в исходном состоянии, при этом уменьшается исходный прогиб матрицы f, плоские участки кромок Е матрицы и пуансона только перекрывают проходное сечение трубопровода без остаточного утонения толщины стенки трубопровода s, являясь предварительными ограничителями перемещения пуансона 13, гарантирующими необходимую величину h. Упругая деформация матрицы и стенок трубопровода в зоне плоских участков кромок Е ограничивается подходом торца штока 14 пуансона 13 к упору Ж удерживающей головки 4. Прекращение движения пуансона стабилизирует напряжения сжатия в материале деформированного трубопровода и изгиба матрицы и увеличивает растягивающую нагрузку корпуса 1, удерживающей головки 4 и зоны их сочленения И, а также усилие сжатия предохранительной тороидальной пружины 15.
При достаточном прогибе предохранительной тороидальной пружины силовые С-образные пружинные фиксаторы 16 выходят из проточки в штоке 14 на поверхность К опорной втулки 17, затем шарики 18 управляемых стопоров для резьбы 19 кромкой Л толкателя 12 отводятся в радиальном направлении, тем самым обеспечивается условие отделения корпуса 1 с силовым приводом, нагревателем, крышками 21, 23 и теплоизоляторами 8, 9 и 10 от удерживающей головки 4. Усилие отделения, обеспечиваемое силовым приводом после пережатия трубопровода и обеспечения должного напряжения в корпусе удерживающей головки, будучи уже значительно меньше стартового усилия силового привода из-за достаточно крутопадающей зависимости развиваемого материалом с эффектом памяти формы усилия от произведенного перемещения, постепенно убывает из-за возникновения сил трения скольжения в многозаходной трапецеидальной резьбовой паре И зоны сочленения корпуса 1 и удерживающей головки 4 и перемещения корпуса вместе с одной из поверхностей приложения усилия разделения.
Эффект торможения усиливается трением, связанным с механической инерционностью силового привода 7. В результате разделения устройства корпус 1 с входящими элементами разворачивается относительно общей оси и отделяется от удерживающей головки 4. При этом положение кромок матрицы и пуансона сохраняется благодаря наличию направляющих пазов М в штоке 14 и соответствующих штифтов 20 в корпусе удерживающей головки. В процессе пережатия происходит перемещение оси трубопровода относительно опоры - кромки матрицы на величину 0,5 (D-h), освобождающее трубопровод от поджатия пружинящим фиксатором захвата 3 (фиг.7), т.е. фиксатор, передав свою функцию матрице и пуансону, перестал быть необходимым. Пустотелая ось 22 пружинящего фиксатора захвата, размещенная в удерживающей головке, имея консольные концы достаточной для операции фиксации трубопровода длины, позволяет путем поворота дужки 2 на 30-40o относительно оси устройства сбросить с нее одну петлю Н фиксатора 3, затем симметричным движением - другую и удалить пружинящий фиксатор захвата с удерживающей головки и трубопровода. Выступы О на корпусе устройства улучшают фиксацию устройства в руке оператора, позволяя выполнять всю работу одной рукой.
Таким образом, совокупность новых признаков предложенного решения устройства для пережатия металлических трубопроводов позволило выполнить поставленную задачу, достигнув нового технического результата: предоставлена возможность безопасной и уверенной работы оператора в скафандре в местах с ограниченными доступом и визуальным контролем операции пережатия функционирующего трубопровода, обеспечена требуемая герметичность и необходимая прочность участка трубопровода, пережатого с его помощью без какого-либо термического воздействия непосредственно на трубопровод при одновременном принципиальном уменьшении габаритов и массы всего устройства и минимальном потреблении энергии для проведения операции пережатия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2000 |
|
RU2191149C2 |
| УСТРОЙСТВО ФИКСАЦИИ ПРЕДМЕТА НА ДВУХ ПОРУЧНЯХ КОСМИЧЕСКОГО ОБЪЕКТА | 2002 |
|
RU2220079C2 |
| УСТРОЙСТВО СТЫКОВКИ РАЗВЕРТЫВАЕМЫХ МОДУЛЕЙ КОСМИЧЕСКИХ АППАРАТОВ | 2001 |
|
RU2222480C2 |
| УЗЕЛ РОТАЦИИ | 2001 |
|
RU2196545C2 |
| СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ДЛЯ ТРУБОПРОВОДОВ | 2002 |
|
RU2224164C1 |
| СПОСОБ РЕГУЛИРОВКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2002 |
|
RU2216653C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2001 |
|
RU2220078C2 |
| ИНСТРУМЕНТ С ОГРАНИЧЕНИЕМ КРУТЯЩЕГО МОМЕНТА | 2002 |
|
RU2223897C1 |
| КЛЮЧ ФИКСИРУЕМЫЙ | 2001 |
|
RU2207948C2 |
| ПОЛИБАРЬЕРНЫЙ СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ДЛЯ МЕТАЛЛИЧЕСКИХ ТРУБОПРОВОДОВ | 2000 |
|
RU2187736C1 |







Изобретение относится к конструкции ручного переносного инструмента для пережатия металлических трубопроводов и может применяться для устранения аварийных ситуаций, проведения ремонтных и других работ в пневматических и гидравлических контурах космических аппаратов в открытом космосе. Устройство для пережатия металлических трубопроводов содержит корпус, силовую скобу с матрицей и пуансоном, связанными с силовым приводом, силовая скоба выполнена в виде отделяемой головки, связанной с корпусом резьбой, и снабжена втулкой для стопорения штока пуансона. Рабочие кромки матрицы и пуансона имеют ограничители остаточной деформации трубопровода в виде плоских обнижений. Силовой привод выполнен в виде набора колец из материала с эффектом памяти формы с установленным на теплопроводящей пасте внутри него электронагревателем и с теплоизоляцией в виде шайб и трубы из термостойкого высокопрочного материала. Технический результат - возможность безопасной работы оператора в скафандре в труднодоступных местах, визуального контроля операции пережатия трубопровода, а также обеспечение требуемой герметичности и необходимой прочности пережатого участка трубопровода, уменьшение габаритов и массы устройства и минимальное потребление энергии. 9 ил.
Устройство для пережатия металлических трубопроводов, преимущественно в открытом космосе, содержащее корпус, силовую скобу с матрицей и пуансоном с направляющими, закрепленными на штоке, связанным через толкатель с силовым приводом, и силовой привод, отличающееся тем, что силовая скоба выполнена в виде отделяемой головки, связанной с корпусом многозаходной трапецеидальной резьбой с пропусками для размещения в корпусе управляемых стопоров для резьбы, и снабжена опорной втулкой для силового стопорения штока пуансона и пустотелой осью, закрепленная на силовой скобе матрица выполнена из пружинящего материала с прогибом в направлении пережимаемого трубопровода, рабочие кромки матрицы и пуансона имеют ограничители остаточной деформации трубопровода в виде плоских обнижений, введены силовые с-образные пружинящие стопоры, размещенные в специальной проточке штока пуансона, силовой привод выполнен в виде набора колец из материала с эффектом памяти формы с установленным на теплопроводящей пасте внутри него электронагревателем и с теплоизоляцией в виде шайб и тонкостенной трубы из термостойкого высокопрочного материала, кроме того, введен механизм разделения, состоящий из предохранительной тороидальной пружины, закрепленной в торце толкателя в контакте со штоком пуансона, толкателя, снабженного кромкой взаимодействия с управляемыми стопорами для резьбы, и самих управляемых стопоров, введены также ряды выступов удержания устройства, равномерно размещенные на внешней поверхности корпуса, и пружинящий фиксатор захвата пережимаемого металлического трубопровода с дужкой, надетый на консоли пустотелой оси силовой скобы, при этом силовая скоба в зоне контактирования с пережимаемым металлическим трубопроводом имеет скошенные боковые поверхности для взаимодействия с пружинящим фиксатором захвата.
| RU 94001119 А1, 20.08.1996 | |||
| SU 1556028 А1, 20.07.1999 | |||
| RU 94001119 А1, 20.08.1996 | |||
| US 4046363 А, 06.09.1977 | |||
| ЭЛЕКТРИЧЕСКИЙ РАЗМЫКАТЕЛЬ | 1997 |
|
RU2120164C1 |
| US 4900078 А, 13.02.1990 | |||
| US 6040643 А, 21.03.2000 | |||
| ЭЛЕКТРОТЕРМИЧЕСКИЙ ПРИВОД ДЛЯ РАЗДВИЖНЫХ ДВЕРЕЙ НАЗЕМНОГО ТРАНСПОРТА | 1997 |
|
RU2114268C1 |

