Изобретение относится к способам регулировки устройств автоматического управления рабочими органами и процессами, работающих преимущественно при воздействии экстремальных условий, например в системах управления ракетой.
Известен способ регулировки гидравлического привода, описанный в [1], включающий подачу рабочей жидкости в магистрали слива и нагнетания, перемещение выходного штока цифроаналогового преобразователя (ЦАП) в крайнее вытянутое положение, перемещение упоров распределительного золотника для обеспечения максимальной скорости поворота выходного вала.
Недостатком указанного способа является трудность согласования угла поворота выходного вала привода с электрическим сигналом на ЦАП при крайних угловых положениях выходного вала.
Наиболее близким к предложенному способу прототипом является способ регулировки гидравлического привода [2], включающий перемещение штока обратной связи ЦАП в крайнее вытянутое положение, установку выходного вала с поршнями на первый упор, отвод ролика к торцу штока обратной связи ЦАП, размещение кулачка устройства обратной связи на выходном валу привода напротив штока обратной связи ЦАП минимальным радиусом своей эвольвентной образующей при обеспечении втягивания штока обратной связи ЦАП в процессе поворота выходного вала привода от первого упора, фиксацию кулачка устройства обратной связи на выходном валу привода, перемещение ролика относительно штока обратной связи ЦАП в сторону выходного вала до касания с кулачком и последующее перемещение упоров распределительного золотника при подаче рабочей жидкости в магистрали слива и нагнетания для обеспечения максимальной скорости поворота выходного вала.
Недостатком указанного способа является трудность обеспечения расчетного угла поворота выходного вала привода при регулировке из-за несоответствия крайних положений выходного вала привода нейтральному положению распределительного золотника.
Техническим результатом использования изобретения является улучшение технологичности регулировки привода посредством координации крайних положений выходного вала привода с нейтральным расположением распределительного золотника относительно гильзы и с одновременной проверкой работоспособности ЦАП.
Технический результат достигается тем, что в предложенном способе регулировки гидравлического привода, включающем перемещение штока обратной связи ЦАП в крайнее вытянутое положение, установку выходного вала с поршнями на первый упор, отвод ролика к торцу штока обратной связи ЦАП, размещение кулачка устройства обратной связи на выходном валу привода напротив штока обратной связи ЦАП минимальным радиусом своей эвольвентной образующей при обеспечении втягивания штока обратной связи ЦАП в процессе поворота выходного вала привода от первого упора, фиксацию кулачка устройства обратной связи на выходном валу привода, перемещение ролика относительно штока обратной связи ЦАП в сторону выходного вала до касания с кулачком и последующее перемещение упоров распределительного золотника при подаче рабочей жидкости в магистрали слива и нагнетания для обеспечения максимальной скорости поворота выходного вала привода, в отличие от прототипа подачу рабочей жидкости в магистрали слива и нагнетания производят одновременно с подачей давления нагнетания в каждое межпоршневое пространство поршневой цепочки ЦАП перед перемещением ролика относительно штока обратной связи ЦАП в сторону выходного вала до касания с кулачком, предварительно установив распределительный золотник в нейтральное положение относительно гильзы, при котором дросселирующие щели закрыты, после перемещения ролика приводят вал во вращение посредством замены давления нагнетания на давление слива в межпоршневом пространстве поршневой цепочки ЦАП, при полном сжатии поршневой цепочки и остановке выходного вала устанавливают выходной вал на второй упор, обеспечивающий расчетный угол поворота выходного вала, после чего перемещают упоры распределительного золотника для обеспечения максимальной скорости поворота выходного вала привода. Для одновременной проверки работоспособности ЦАП давление нагнетания на давление слива в межпоршневом пространстве поршневой цепочки ЦАП меняют с равномерной частотой, начиная с минимального зазора между поршнями, в определенной последовательности, соответствующей убыванию двоичного кода с количеством разрядов, соответствующим количеству зазоров между поршнями, а в процессе вращения выходного вала контролируют равномерность его угловой скорости, в противном случае принимают решение о неработоспособности ЦАП.
Выполнение отличительных признаков способа позволяет улучшить технологичность регулировки привода за счет обеспечения расчетного угла поворота выходного вала при установке кулачка обратной связи.
На чертеже представлена общая конструктивная схема гидравлического привода.
Гидравлический привод включает корпус 1 с гидромагистралями, в том числе слива и нагнетания, ЦАП 2 с цепочкой плавающих поршней 3 и толкателем 4, золотниковое распределительное устройство, состоящее из распределительного золотника 5 и гильзы 6, гидравлически связанное с исполнительным механизмом 7 поворотного типа. Исполнительный механизм 7 содержит поршни 8 и 9, а также выходной вал 10. На выходном валу 10 привода установлен и жестко зафиксирован кулачок 11 с эвольвентной образующей наружной поверхности, причем окружность эвольвенты соосна с выходным валом 10. Кулачок 11 взаимодействует с роликом 12, ось которого параллельна оси выходного вала 10, ролик 12 установлен на штоке обратной связи 13 ЦАП 2. Шток 13 направлен по касательной к окружности эвольвенты кулачка 11 и постоянно поджат давлением нагнетания к кулачку 11 через ролик 12, а толкатель 4 и плавающие поршни 3 поджаты к штоку 13 промежуточным штоком 15 при отсутствии давления нагнетания в межпоршневом пространстве плавающих поршней 3. Втулка 14 ограничивает перемещение распределительного золотника 5 в сторону выходного вала 10, а упор 16 через промежуточный шток 15 ограничивает перемещение в противоположную сторону. Между роликом 12 и штоком 13 размещен узел изменения осевого положения, включающий резьбовое отверстие в штоке 13, резьбовой конец 17 и контргайку 18. Силовой механизм 7 снабжен упорами: первым 19 и вторым 20.
Гидравлический привод работает следующим образом: при подаче в корпус 1 давления слива и нагнетания, а на ЦАП 2 электрического сигнала в двоичном цифровом коде с количеством разрядов, соответствующим числу зазоров между плавающими поршнями 3, поршневая цепочка приходит в движение (сжимается или раздвигается), это движение через толкатель 4 передается на распределительный золотник 5, который определенным образом открывает щели в золотниковом распределительном устройстве, состоящем из золотника 5 и гильзы 6. Эти щели гидравлически связывают магистрали слива и нагнетания с исполнительным механизмом 7, поршни 8 и 9 которого приходят в движение и поворачивают выходной вал 10 привода. Кулачок 11 поворачивается вместе с выходным валом 10, при этом ролик 12 обкатывается по кулачку 11, поворачиваясь вокруг своей оси и заставляя шток 13 изменять свое положение относительно корпуса 1 при изменении радиуса эвольвентной окружности поверхности кулачка 11. При этом распределительный золотник 5, толкатель 4 и плавающие поршни 3 перемещаются в сторону закрытия щелей в золотниковом распределительном устройстве, поджимаемые к штоку 13 промежуточным штоком 15. Ширина щелей регулируется изменением длины втулки 14 и перемещением упора 16. Изменение осевого положения ролика 12 относительно штока 13 обеспечивается ввинчиванием или вывинчиванием резьбового конца 17 в резьбовое отверстие штока 13, а фиксация нужного положения обеспечивается затяжкой контргайки 18. Упоры 19 и 20 определяют крайние угловые положения выходного вала привода и обеспечивают расчетный угол поворота выходного вала.
Способ регулировки гидравлического привода осуществляется следующим образом: перемещают шток обратной связи ЦАП 2 в крайнее вытянутое положение, устанавливают максимальный зазор между плавающими поршнями 3 ЦАП, перемещают поршень 8 на первый упор 19 исполнительного механизма 7, а поршень 9 устанавливают в крайнее верхнее положение. После этого максимально отводят ролик 12 к торцу штока 13 обратной связи ЦАП, например, ввинчивая резьбовой конец 17 в резьбовое отверстие в штоке 13, чтобы ролик 12 не мешал установке кулачка 11. Затем устанавливают кулачок 11 на выходном валу 10 и поворачивают его таким образом, чтобы эвольвентная образующая была направлена к штоку 13 обратной связи ЦАП своим минимальным радиусом, а при перемещении поршня 9 на упор 20 кулачок поворачивался бы к ролику своим максимальным радиусом. В этом положении кулачок 11 фиксируют на выходном валу 10. Устанавливают распределительный золотник 5 относительно гильзы 6 в нейтральное положение, при котором дросселирующие щели закрыты, например, за счет доработки по длине толкателя 4, заранее выполненного с припуском, после чего присоединяют гидравлический привод к внешнему источнику гидропитания и подают рабочую жидкость в магистрали слива и нагнетания, при этом уточняют положение первого упора (в случае изменения положения выходного вала 10 после подачи давления доворачивают упор 19 к поршню 8). При неподвижном выходном валу 10 для устранения зазора между роликом и кулачком вывинчивают резьбовой конец 17 ролика 12 из штока 13 до касания роликом 12 кулачка 11 и в этом положении стопорят резьбовой конец 17 контргайкой 18. После устранения зазора приводят выходной вал 10 во вращение посредством замены давления нагнетания на давление слива между поршнями 3 поршневой цепочки ЦАП, при полном сжатии поршневой цепочки и остановке выходного вала 10 устанавливают выходной вал на второй упор 20, обеспечивающий расчетный угол поворота выходного вала, после чего регулируют максимальную скорость поворота выходного вала изменением величины щелей, открываемых в золотниковом распределительном устройстве (изменением длины втулки 14 и перемещением упора 16). Для одновременной проверки работоспособности ЦАП давление нагнетания на давление слива в межпоршневом пространстве поршневой цепочки ЦАП меняют с равномерной частотой, начиная с минимального зазора между поршнями 3, в определенной последовательности, соответствующей убыванию двоичного кода с количеством разрядов, соответствующим количеству зазоров между поршнями 3, а в процессе вращения выходного вала 10 контролируют равномерность его угловой скорости, в противном случае принимают решение о неработоспособности ЦАП.
Установка распределительного золотника в нейтральное положение при положении выходного вала на упоре обеспечивает поворот гидравлического привода на расчетный угол без дополнительной доработки или переустановки кулачка, а подача рабочей жидкости в магистрали слива и нагнетания после установки распределительного золотника в нейтральное положение позволяет избежать промывки и сушки привода перед доработкой толкателя, что значительно снижает трудоемкость и улучшает технологичность регулировки гидравлического привода.
Источники информации
1. Патент RU 1791625, кл. F 15 В 11/12, 9/02, 1990 г.
2. Патент RU 2174626, кл. F 15 В 9/02, 2000 г.
Способ предназначен для регулировки гидравлического привода. Способ включает перемещение штока обратной связи цифроаналогового преобразователя в крайнее вытянутое положение, установку выходного вала с поршнями на первый упор, отвод ролика к торцу штока обратной связи цифроаналогового преобразователя, размещение кулачка устройства обратной связи на выходном валу привода напротив штока обратной связи цифроаналогового преобразователя минимальным радиусом своей эвольвентной образующей при обеспечении втягивания штока обратной связи цифроаналогового преобразователя в процессе поворота выходного вала привода от первого упора, фиксацию кулачка устройства обратной связи на выходном валу привода, перемещение ролика относительно штока обратной связи цифроаналогового преобразователя в сторону выходного вала до касания с кулачком и последующее перемещение упоров распределительного золотника при подаче рабочей жидкости в магистрали слива и нагнетания для обеспечения максимальной скорости поворота выходного вала привода, при этом подачу рабочей жидкости в магистрали слива и нагнетания с одновременной подачей давления нагнетания в каждое межпоршневое пространство поршневой цепочки цифроаналогового преобразователя производят перед перемещением ролика относительно штока обратной связи цифроаналогового преобразователя в сторону выходного вала до касания с кулачком, предварительно установив распределительный золотник в нейтральное положение относительно гильзы, при котором дросселирующие щели закрыты, после перемещения ролика приводят вал во вращение посредством замены давления нагнетания на давление слива в межпоршневом пространстве поршневой цепочки цифроаналогового преобразователя, при полном сжатии поршневой цепочки и остановке выходного вала устанавливают выходной вал на второй упор, обеспечивающий расчетный угол поворота выходного вала, после чего перемещают упоры распределительного золотника для обеспечения максимальной скорости поворота выходного вала привода. Технический результат - снижение трудоемкости регулировки привода. 1 з.п. ф-лы, 1 ил.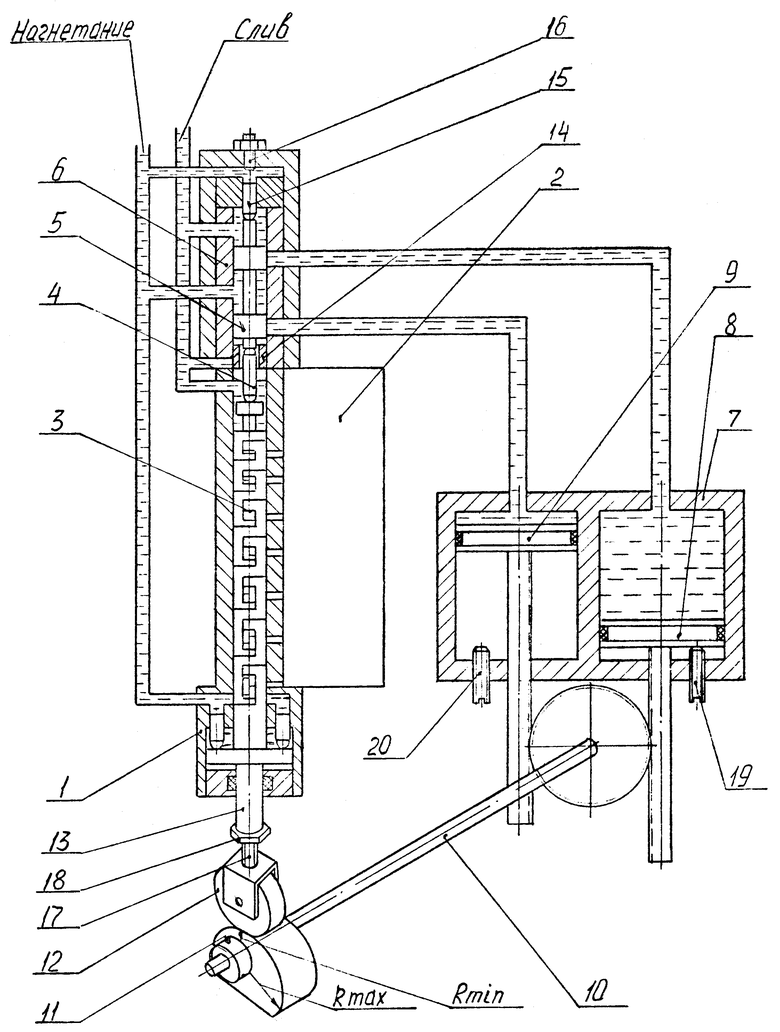
| ГИДРАВЛИЧЕСКИЙ ПРИВОД И СПОСОБ РЕГУЛИРОВКИ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2000 |
|
RU2174626C1 |
| Цифровой привод | 1990 |
|
SU1791625A1 |
| ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2000 |
|
RU2174627C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1996 |
|
RU2103564C1 |
| УСТРОЙСТВО ДЛЯ ПРОХОДКИ СКВАЖИНЫ БЕЗ ВЫЕМКИ ГРУНТА | 2020 |
|
RU2757612C2 |

