Изобретение относится к области радиоэлектроники и может быть использовано для определения местоположения надземного, надводного и подводного излучателей.
Известна система для измерения двух угловых координат, дальности и высоты цели (Патент US 4626861, МКИ 4 G 01 S 3/02, 5/02, 1986 г.), содержащая качающуюся антенну с двумя приемными плоскостями, приемник с устройствами измерения разности времени приема антенными плоскостями прямого и зеркально отраженного сигналов, устройство измерения высоты приемника и вычислительное устройство. Недостатком системы являются ограниченные функциональные возможности при значительной сложности конструкции.
Наиболее близким по технической сущности к заявляемому является устройство, реализующее пассивный способ определения координат излучающего объекта (Патент РФ 2134891, МПК 6 G 01 S 3/02, 1999 г.), содержащее пеленгатор, системы наведения по углу места и азимуту с преобразователями "угол-код", пороговое устройство с управлением уровнем порога, устройство синхронизации с управлением уровнем синхронизации, генератор развертки, регулятор интервала задержки, компаратор, генератор строб-импульса, индикатор, АЦП и спецвычислитель. Недостатком устройства являются ограниченные функциональные возможности при значительной сложности конструкции.
Задачей изобретения является расширение функциональных возможностей измерителя без усложнения конструкции.
Решение задачи достигается тем, что в измеритель координат движущегося излучающего объекта, содержащий последовательно соединенные пеленгатор, вход которого является входом устройства, пороговое устройство, генератор импульсов синхронизации, генератор развертки, компаратор и генератор строб-импульса, индикатор, информационный вход которого соединен с выходом порогового устройства, измерительный вход соединен с выходом генератора строб-импульса, а вход развертки соединен с другим выходом генератора развертки, последовательно соединенные источник постоянного напряжения, регулятор интервала задержки, другой выход которого соединен с другим входом компаратора, АЦП и вычислитель, выход которого является выходом устройства, устройство управления порогом, вход которого соединен с вторым выходом источника постоянного напряжения, а выход соединен с управляющим входом порогового устройства, устройство управления уровнем синхронизации, вход которого соединен с третьем выходом источника постоянного напряжения, а выход соединен с управляющим входом генератора импульсов синхронизации, введены последовательно соединенные другой регулятор интервала задержки, вход которого соединен с первым выходом источника постоянного напряжения, и другой АЦП, выход которого соединен с вторым входом вычислителя, другой компаратор, вход которого соединен с выходом генератора развертки, другой вход соединен с другим выходом другого регулятора интервала задержки, а выход соединен с входом генератора строб-импульса, и блок уставок, выход которого соединен с третьем входом вычислителя.
Технический результат состоит в расширении функциональных возможностей измерителя за счет обеспечения использования надводного и подводного применения без усложнения конструкции системы.
На чертеже изображена структурная схема измерителя.
Измеритель содержит пеленгатор 3, пороговое устройство 4, индикатор 5, устройство 7 управления порогом, источник 8 постоянного напряжения, регулятор 9 интервала задержки, другой регулятор 1 интервала задержки, АЦП 10, другой АЦП 2, вычислитель 11, блок 12 уставок, устройство 13 управления уровнем синхронизации, генератор 14 импульсов синхронизации, генератор 15 развертки, компаратор 16, другой компаратор 6 и генератор 17 строб-импульса.
Измеритель работает следующим образом. От каждого измерительного радиоимпульса высотомера объекта, который движется на малом расстоянии от подстилающей поверхности (суши, водной или донной поверхностей), на вход пеленгатора 3 средства разведки поступают последовательно три радиоимпульса: прямой, а также диффузно и зеркально отраженные от подстилающей поверхности. С выхода пеленгатора 3 соответствующие видеоимпульсы поступают на индикатор 5, на котором посредством генератора 15 развертки, управляемого с помощью устройства 13 управления уровнем синхронизации и генератора 14 импульсов синхронизации, осуществляют развертку по времени, а посредством порогового устройства 4 с помощью устройства 7 управления порогом осуществляют развертку по уровню. Изображения видеоимпульсов на индикаторе 5 располагают на уровне, удобном для наблюдения и измерений, причем начало развертки совмещают с передним фронтом первого видеоимпульса. Измерения производятся с помощью двух узких измерительных строб-импульсов, перемещаемых по экрану индикатора 5 по линии временной развертки. Первый строб-импульс формируется посредством генератора 17 строб-импульса в момент срабатывания компаратора 16, определяемый регулятором 9 интервала задержки, с помощью которого первый строб-импульс перемещают в положение, соответствующее переднему фронту второго видеоимпульса. При этом на входе АЦП 10 образуется уровень напряжения U1, пропорциональный временной задержке τ1 второго видеоимпульса по отношению к первому видеоимпульсу. В АЦП 10 напряжение U1 преобразуется в код, поступающий в вычислитель 11. Второй строб-импульс формируется аналогично посредством генератора 17 строб-импульса в момент срабатывания другого компаратора 6, определяемый другим регулятором 1 интервала задержки, с помощью которого второй строб-импульс перемещают в положение, соответствующее переднему фронту третьего видеоимпульса. При этом на входе другого АЦП 2 образуется уровень напряжения U2, пропорциональный временной задержке τ2 третьего видеоимпульса по отношению к первому видеоимпульсу. В другом АЦП 2 напряжение U1 преобразуется в код, поступающий в вычислитель 11. В вычислителе 11 производятся вычисление текущих значений высоты h объекта по известной формуле (Ягольников С.В. Разностный метод определения координат летательных аппаратов по сигналам их радиовысотомеров одним бортовым средством разведки // Радиотехника, 1997, 5, с. 51):
h≈c(τ2-τ1/2),
вычисление и запоминание текущих значений приращения высоты Δh объекта и путем их сопоставления с соответствующими приращениями высот по цифровой карте рельефа подстилающей поверхности наблюдаемого района вычисление местоположения движущегося объекта. Необходимые начальные константы и цифровая карта рельефа подстилающей поверхности наблюдаемого района заводятся в вычислитель посредством блока 12 уставок.
Измеритель может быть выполнен из известных модулей и на доступной элементной базе. Например, конструкция пеленгатора 3 может совпадать с конструктивным выполнением объединенных блоков 1, 3, 6 прототипа, а блоки 4, 5, 7-11, 13-17 могут совпадать по конструктивному выполнению с блоками тех же номеров прототипа. Одинаковыми по конструкции являются блоки 6 и 16, 1 и 9, 2 и 10. Блок 12 уставок может быть выполнен стационарным или съемным, с применением комплекта перемычек или/и на клавишной базе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ДАЛЬНОМЕР | 1992 |
|
RU2069003C1 |
| Стробоскопический осциллограф с коррекцией нелинейности развертки | 1981 |
|
SU970233A1 |
| Устройство для контроля изделий по сигналам акустической эмиссии | 1985 |
|
SU1262363A1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134431C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
| Устройство для измерения гистерезиса @ характеристик | 1985 |
|
SU1247797A1 |
| Устройство дистанционного зондирования подповерхностных слоев почвы | 1989 |
|
SU1684770A1 |
| Ультразвуковой дефектоскоп | 1987 |
|
SU1499223A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЭНЕРГЕТИЧЕСКОГО ПОТЕНЦИАЛА | 1978 |
|
SU1840904A1 |
Изобретение относится к радиоэлектронике и может быть использовано для определения местоположения надземного, надводного и подводного излучателей. Техническим результатом является расширение функциональных возможностей измерителя, который достигается тем, что измеритель содержит пеленгатор, пороговое устройство, индикатор, устройство управления порогом, источник постоянного напряжения, два регулятора интервала задержки, два АЦП, вычислитель, блок уставок, устройство управления уровнем синхронизации, генератор импульсов синхронизации, генератор развертки, два компаратора и генератор строб-импульса. Технический результат состоит в расширении функциональных возможностей измерителя за счет обеспечения использования надводного и подводного применения без усложнения конструкции системы. 1 ил.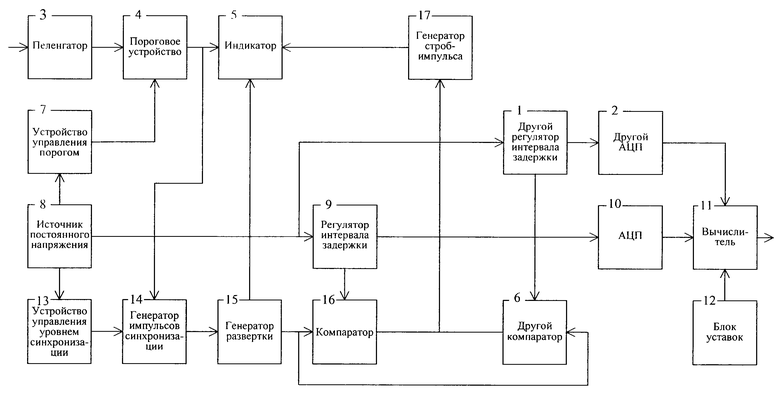
Измеритель местоположения движущегося излучающего объекта, содержащий последовательно соединенные пеленгатор, вход которого является входом устройства, пороговое устройство, генератор импульсов синхронизации, генератор развертки, компаратор и генератор строб-импульса, индикатор, информационный вход которого соединен с выходом порогового устройства, измерительный вход соединен с выходом генератора строб-импульса, а вход развертки соединен с другим выходом генератора развертки, последовательно соединенные источник постоянного напряжения, регулятор интервала задержки, другой выход которого соединен с другим входом компаратора, АЦП и вычислитель, выход которого является выходом устройства, устройство управления порогом, вход которого соединен с вторым выходом источника постоянного напряжения, а выход соединен с управляющим входом порогового устройства, устройство управления уровнем синхронизации, вход которого соединен с третьим выходом источника постоянного напряжения, а выход соединен с управляющим входом генератора импульсов синхронизации, отличающийся тем, что в него введены последовательно соединенные другой регулятор интервала задержки, вход которого соединен с первым выходом источника постоянного напряжения, и другой АЦП, выход которого соединен с вторым входом вычислителя, другой компаратор, вход которого соединен с выходом генератора развертки, другой вход соединен с другим выходом другого регулятора интервала задержки, а выход соединен с входом генератора строб-импульса, и блок уставок, выход которого соединен с третьим входом вычислителя.
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1999 |
|
RU2149419C1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| US 5119104 A, 02.06.1992. | |||

