Изобретение относится к области автоматики и вычислительной техники и предназначено для управления комплексом торпедно-ракетного вооружения (ТРВ), включая торпедные аппараты (ТА) и пусковые установки средств самообороны (ПУ СО), а также управления оружием всех типов (торпеды, ракеты и средства самообороны).
Известны системы автоматизированного управления (САУ) комплексами торпедо-ракетного вооружения подводных лодок (ПЛ), состоящие из ряда автономных систем, приборы каждой из которых решают только отдельные функционально разграниченные задачи. Задачи управления торпедными аппаратами, включая их перезарядку, возложены на пульт управления и приборы системы автоматизированного управления торпедными аппаратами (САУ ТА) (Militori Technology, 1993, v. 17, 7), пусковыми установками средств самообороны на приборы системы управления, задачи предстартовой подготовки ракет на аппаратуру предстартовой подготовки (АПП) (The Naval Archieci, 1193, ll. Gane^s Navy International, 1997, v. 102, 5). Задачи предстартовой подготовки торпед и средств самообороны и задачи выработки и ввода данных стрельбы в оружие всех типов, включая ракеты, возложены на пульты управления и приборы боевой информационно управляющей системы (БИУС). При этом указанные системы обеспечивают управление оружием конкретного набора их типов, числа и типа торпедных аппаратов и пусковых установок.
Известно также, что каждая из указанных систем построена на приборах, реализующих определенные функции и фрагменты задач управления объектами конкретного функционального назначения и спроектированные под определенные число и тип ТА и ПУ, число и тип образцов оружия и средств СО определенного назначения.
Все известные системы управления комплексами ТРВ подводных лодок построены на указанных выше локальных системах, имеющих, как правило, разнородную аппаратно-программную платформу.
Как следствие недостатком таких систем является необходимость проведения предстартовой подготовки и ввода данных в оружие, а также приготовления ТА (пусковых установок) и производства выстрела от приборов, имеющих различные схемотехнические решения, что предопределяет следующие недостатки таких систем:
- увеличение состава аппаратуры и как следствие рост массогабаритных характеристик, потребляемой мощности (тепловыделения) и числа кабельных связей;
- снижение надежности из-за увеличения количества аппаратуры и коммутационных связей;
- увеличение ЗИП.
И как следствие указанных недостатков - рост эксплуатационных расходов.
К недостаткам таких систем следует также отнести значительные сроки и материальные затраты при проведении работ по замене образцов эксплуатируемого на ПЛ оружия на новое в силу того, что модернизационный потенциал этих систем обеспечивается, как правило, на приборном уровне, путем доработки (замены) аппаратуры и приборов с увеличением оборудования и доработкой программного обеспечения.
Кроме отмеченных недостатков указанным системам присущ общий недостаток, заключающийся в том, что для обеспечения аппаратно-программных связей с бортом оружия, находящегося в ТА, подключение АПП, электропитания борта оружия и подключение пульта для ввода данных стрельбы выполняется с использованием специальной коммутационной аппаратуры, что ведет к снижению надежности функционирования трактов управления оружием.
Наиболее близким техническим решением, принятым за прототип, является система автоматизированного управления функциональным комплексом ТРВ (Gane^s Navy International, 1997, v. 102, 5), содержащая пульты управления, аппаратуру предстартовой подготовки, вычислительные устройства выработки данных целеуказания и стрельбы, устройство подключения интерфейса соответствующего оружия, находящегося в ТА.
Целью настоящего изобретения является сокращение аппаратурного состава, снижение потребляемой мощности, тепловыделения, сроков и стоимостных характеристик проектирования, а также изготовления и проведения в ходе эксплуатации модернизационных работ.
Для достижения этого технического результата в систему, построенную на трех уровнях управления, к пульту управления БИУС подключаются унифицированные приборы второго (ЦПКУ) и третьего (ПКУ) уровней. Приборы всех уровней связаны сегментами локальной вычислительной сети (ЛВС), например, по стандарту MIL STD 1553. Прибор верхнего уровня пульт БИУС соединен по ЛВС с прибором второго уровня ЦПКУ, который в свою очередь соединен с датчиками (Д), сигнализаторами (С) и исполнительными механизмами (ИМ) общей части торпедных аппаратов (пусковых установок), а также связан сегментом ЛВС с приборами третьего уровня ПКУ. При этом каждый прибор ПКУ связан с датчиками, сигнализаторами и исполнительными механизмами индивидуальной части конкретного торпедного аппарата, а также с находящимся в этом ТА оружием для управления предстартовой подготовкой и ввода в оружие данных стрельбы.
Аналогично решаются задачи управления пусковыми установками (ПУ) средств самообороны и самими средствами самообороны.
Существенность отличий предлагаемого технического решения заключается в построении системы автоматизированного управления комплексом ТРВ и СО на базе одной системы, состоящей из единого пульта управления и двух типовых унифицированных приборов, обеспечивающих совместное управление оружием (торпедами, ракетами, средствами самообороны) и вооружением (торпедными аппаратами, пусковыми установками). При этом построение этих приборов не зависит от типов применяемого оружия и средств самообороны.
Число унифицированных приборов ЦПКУ определяется числом типов систем вооружения (ТА, ПУ) подводной лодки.
Число унифицированных приборов ПКУ не зависит от типов оружия и средств самообороны и определяется только числом торпедных аппаратов (пусковых установок) подводной лодки.
Такое решение реализует независимое по канальное управление каждым торпедным аппаратом (пусковой установкой) и находящимся в нем оружием, что исключает возможность группового отказа при залповой стрельбе.
Предлагаемое техническое решение обеспечивает возможность замены типа оружия (вооружения) при модернизации ПЛ и внедрения на подводные лодки новых образцов оружия (средств самообороны) без замены или установки дополнительных приборов в составе системы (при сохранении количества ТА, ПУ). Решение данной задачи обеспечивается только за счет изменения программного обеспечения соответствующих приборов (пульта, ЦПКУ и ПКУ) и замены в них отдельных модулей из унифицированного ряда, рассматриваемого ниже, связанных со спецификой применяемого вновь оружия (вооружения).
Объединение приборов всех уровней сегментами ЛВС сокращает число кабельных связей, обеспечивает оперативность передачи информации, не требует увеличения количества приборов (ЦПКУ и ПКУ) и прокладки дополнительных магистральных и местных кабелей при модернизации оружия и вооружения при сохранении числа ТА и ПУ СО.
Данное техническое решение отвечает критерию существенности отличий, так как предлагаемая совокупность отличительных признаков не встречается среди рассмотренных аналогов и обеспечивает достижение поставленной цели изобретения.
Укрупненная структурная схема предлагаемой системы автоматизированного управления ТА комплекса ТРВ и СО ПЛ представлена на фиг.1.
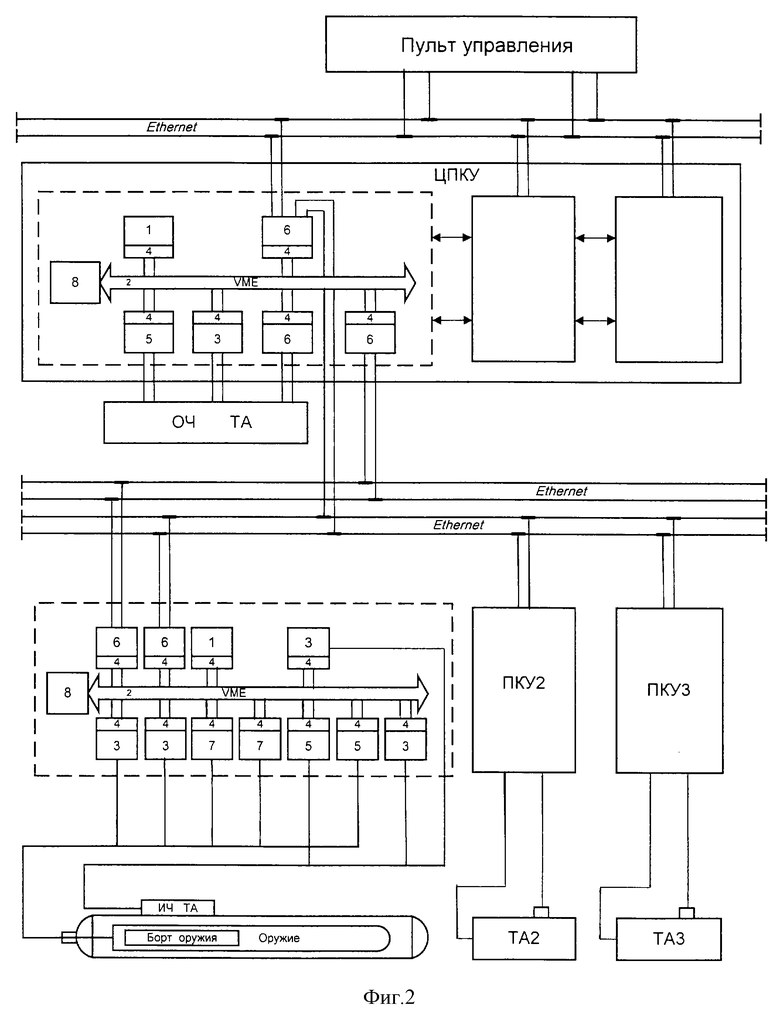
На структурной схеме фиг.1 показан пульт управления (ПУ) БИУС на верхнем уровне и охваченные ЛВС ЦПКУ на втором уровне и на третьем уровне приборы ПКУ, число которых соответствуют количеству ТА (пусковых установок) подводной лодки. Приборы смежных уровней связаны сегментами не обязательно однородной локальной вычислительной сети (например, Ethernet на верхнем уровне и MIL STD - на нижнем), то есть с позиции обмена информационными массивами, командами и сигналами контроля и управления система построена на базе сетевой ассоциации. Все приборы (ЦПКУ и ПКУ) построены на унифицированных схемотехнических и программных решениях и включают в себя (фиг.2):
1. Процессорную плату (1), имеющую выход на приборную системную шину (2), например VME bus.
2. Модуль ввода - вывода (3), имеющую на одном входе контроллер системной шины прибора (4), а на другом - линии параллельного интерфейса. Модуль может быть трех типов и обеспечивать:
- выдачу релейных сигналов для управления исполнительными механизмами ИЧ и ОЧ торпедных аппаратов (пусковых установок) и бортовой аппаратурой оружия (средств самообороны);
- прием релейных сигналов от датчиков и сигнализаторов ИЧ и ОЧ торпедных аппаратов (пусковых установок) на всех этапах подготовки и производства выстрела, а также от бортовой аппаратуры оружия (средств самообороны);
- выдачу и прием релейных сигналов для управления и контроля преимущественно средствами самообороны и их пусковыми установками.
3. Модули приема и обработки аналоговых сигналов (5), имеющие со стороны одного входа, как и все остальные модули, контроллер системной шины (4), со стороны другого входа - аналого-цифровой преобразователь с коммутатором на входе для приема унифицированных сигналов напряжения и тока от бортовых систем оружия, а также от датчиков индивидуальной и общей частей ТА (ПУ), например 0-4 МА, 4-20 МА, 0-10 В постоянного тока и др.
4. Модули приема цифровых сигналов, представляющие собой один из типов модуля (3), имеющие со стороны одного входа - контроллер системной шины (4), а со стороны другого входа - контроллер соответствующего интерфейса для абонента, например RS - 485.
5. Модули организации межприборного обмена по сегментам ЛВС (6), выбранной при построении всей системы, имеющие со стороны одного входа - контроллер приборной системной шины (4), со стороны другого входа - контроллер ЛВС, например контроллер MIL STD 1553 или Ehtemet.
6. Модули (7), работающие на специальный интерфейс борта торпед, ракет и средств самообороны, например Airing, для обмена кодовой информацией с бортом оружия в ходе предстартовой подготовки и пуска ракет. Модули имеют со стороны одного входа контроллер системной шины (4), а со стороны другого входа - контроллер, поддерживающий соответствующий интерфейс с бортом оружия.
Все модули устанавливаются в крейте (приборном каркасе) и связываются между собой через приборную системную шину (2), проложенную в крейте.
Скомпонованные таким образом системные блоки (крейты с установленными в них модулями в количестве и наборе, соответствующем функциональному назначению унифицированного прибора) встраиваются в приборы всех уровней. Все приборы снабжены встроенными источниками питания (8), запитывающими все модули системных блоков через системные шины (2).
Пульт управления использует такой же системный блок и содержит, помимо этого, стандартный набор средств комплектации ПЭВМ (монитор, клавиатура и пр. ). Управление оружием и вооружением выполняется оператором с этого пульта.
Прибор ЦПКУ, выполняющий ряд важных системных функций для повышения надежности системы в целом, выполнен по трехпроцессорной схеме. Процессоры синхронизируются на программном уровне с обработкой информации по мажоритарной схеме голосования "два из трех" по входу и выходу.
Прибор ЦПКУ обеспечивает:
- управление и контроль работы всех приборов ПКУ;
- контроль достоверности всей передаваемой информации;
- управление группами механизмов общей части торпедных аппаратов (пусковых установок);
- контроль источников питания приборов системы.
На приборы ЦПКУ возложена также диагностика отказов и неисправностей в каналах управления оружием и вооружением.
Приборы ПКУ, число которых, как отмечено выше, равно числу ТА (ПУ), обеспечивают контроль и управление индивидуальной частью каждого ТА (ПУ), предстартовую подготовку, а также ввод данных в оружие и средства СО, находящееся в ТА (ПУ).
Надежность приборов ПКУ обеспечивается схемотехническими решениями их модульного построения.
Такая структура построения системы обеспечивает требуемую надежность и достоверность выработки данных и доведение их до объектов управления, а также надежное управления этими объектами.
Совмещение в одном канале (в приборе ПКУ) функций управления предстартовой подготовкой и вводом данных стрельбы в оружие, а также подготовкой торпедного аппарата (включая его перезарядку) к стрельбе позволяет отказаться от ряда отдельных систем и приборов (АПП, САУ ТА, др.), обеспечить повышение надежности системы управления комплекса ТРВ и СО ПЛ в целом.
Наличие сетевых модулей (6), обеспечивающих обмен всеми данными, кодовыми посылками с большой скоростью и достоверностью, позволило отказаться от многочисленных физических связей между приборами и сформировать независимые каналы управления для каждого ТА (ПУ) и размещенного в нем оружия (средства самообороны), что, в свою очередь, сокращает количество и массу кабельных трасс.
Комплексирование приборов ПКУ набором сменных модулей при общем количестве до 15 обеспечивает системе в целом высокие модернизационные возможности по внедрению новых образцов оружия и модернизации ТРВ подводной лодки.
Составные части системы находятся под управлением операционной системы реального времени (Hard read time), например QNX.4.2.X.
Программы, реализующие алгоритмы решения задач контроля измеряемых параметров управления исполнительными механизмами ТА (ПУ), выработки данных стрельбы, передачи команд и данных стрельбы в приборы ПКУ нижнего уровня, размещаются в электрически перепрограммируемой памяти, например Flash disk, устанавливаемой на платах микроЭВМ унифицированных приборов системы.
Каждая программа, обеспечивающая реализацию алгоритмов по подготовке торпедного аппарата к выстрелу различных типов оружия, имеет свой номер.
При получении по ЛВС из ЦПКУ команды на подготовку торпедного аппарата к выстрелу оружия из этого аппарата в памяти ПКУ выбирается необходимый алгоритм подготовки ТА к выстрелу и программа предстартовой подготовки нужного типа оружия по соответствующему номеру. С этого момента в системе протекают два независимых процесса управления - процесс управления торпедным аппаратом и процесс управления, размещенным в нем оружием.
С пульта управления в ЦПКУ по трем каналам выдается команда на приготовление оружия. После мажорирования команды в ЦПКУ, как и любой другой, принимаемой и передаваемой информации, команда передается в нижний сегмент сети и принимается набранным в залп ПКУ, который проводит предстартовую подготовку оружия. Параллельно с управлением предстартовой подготовкой в ПКУ на пульте решается задача выработки данных стрельбы и после получения от ПКУ сигнала о готовности оружия с него по тому же каналу ПУ-ЦПКУ-ПКУ в оружие выдается массив данных стрельбы, который в модуле специального интерфейса (7) ПКУ преобразуется в формат данных, вводимых в оружие, и через разъем ТА поступает в бортовую аппаратуру оружия.
Другой процесс управления (идущий параллельно) - процесс управления торпедным аппаратом при подготовке к выстрелу и производству залпа - идет под управлением двух приборов. Прибор ЦПКУ управляет механизмами общей части торпедных аппаратов, прибор ПКУ - механизмами индивидуальной части конкретного торпедного аппарата по выбранному алгоритму его подготовки. После окончания приготовления к выстрелу и поступления на пульт управления от ЦПКУ сигнала о готовности ТА с него по ЛВС дается команда на выстрел. При таком функционировании каналов управления оружием (средствами СО), обеспечивающим с высокой надежностью его боевое применение, система реализует залповую стрельбу боезапасом в любом сочетании набранных в залп торпедных аппаратов, независимую подготовку оружия и торпедных аппаратов (ПУ).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНАЯ ЛОДКА (ВАРИАНТЫ) | 1999 |
|
RU2151711C1 |
| ИНТЕГРИРОВАННАЯ ПОДСИСТЕМА УПРАВЛЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ | 2019 |
|
RU2756387C1 |
| ПОДВОДНАЯ ЛОДКА С ВОЗДУШНЫМИ ТОРПЕДНЫМИ АППАРАТАМИ | 2002 |
|
RU2219096C1 |
| АВТОМАТИЗИРОВАННЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ КОРАБЛЕЙ | 2003 |
|
RU2234138C1 |
| Пусковая установка с гравитационно-пружинным выстреливанием подводных снарядов с возможностью размещения на плавсредствах и/или летательных аппаратах | 2024 |
|
RU2834491C1 |
| ПОДВИЖНАЯ БОЕВАЯ МАШИНА С КОМПЛЕКСОМ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМОМУ, САМОНАВОДЯЩЕМУСЯ ОРУЖИЮ И АРТИЛЛЕРИЙСКОМУ ОРУЖИЮ С ЛАЗЕРНЫМИ ДАЛЬНОМЕРАМИ | 1998 |
|
RU2151360C1 |
| БРОНИРОВАННАЯ БАШНЯ "ТАЙФУН" БОЕВОЙ МАШИНЫ | 2003 |
|
RU2254546C1 |
| ТРЕНАЖЕР НАВОДЧИКОВ-ОПЕРАТОРОВ УСТАНОВОК ПУСКА РАКЕТ ИЛИ СТРЕЛЬБЫ ИЗ ОРУДИЙ И ПУЛЕМЕТОВ | 1999 |
|
RU2179698C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2133432C1 |
| БЕРЕГОВОЙ РАКЕТНЫЙ ПРОТИВОКОРАБЕЛЬНЫЙ КОМПЛЕКС | 2005 |
|
RU2285889C1 |
Изобретение относится к области автоматики и вычислительной техники и может найти применение в управлении средствами комплекса торпедно-ракетного вооружения. Технический результат заключается в сокращении аппаратурного состава и снижении потребляемой мощности. Система содержит торпедные аппараты, пусковые установки средств самообороны, исполнительные механизмы, датчики и сигнализаторы, пульт управления на верхнем уровне, по крайней мере один центральный прибор контроля и укрепления на втором уровне и приборы контроля и управления на третьем уровне, указанные приборы выполнены унифицированными на микроЭВМ и подключены к датчикам, сигнализаторам и исполнительным механизмам соответственно общей части и индивидуальной части торпедных аппаратов и пусковых установок средств самообороны. При этом число унифицированных центральных приборов контроля и управления определяется числом типов систем вооружения. 2 ил.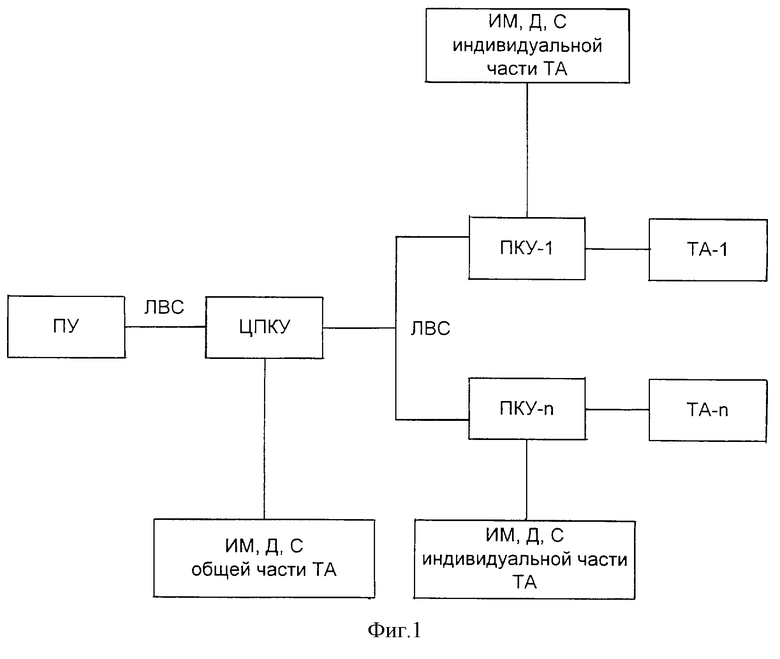
Система автоматизированного управления комплексом торпедно-ракетного вооружения подводных лодок, включающим торпедные аппараты и пусковые установки средств самообороны, исполнительные механизмы, датчики и сигнализаторы общей и индивидуальной частей торпедных аппаратов и пусковых установок средств самообороны, пульт управления на верхнем уровне, обеспечивающий выбор типа оружия, средств самообороны и назначение торпедных аппаратов к стрельбе, выработку данных стрельбы и производство выстрела, отличающаяся тем, что в систему введены по крайней мере один центральный прибор контроля и управления на втором уровне и приборы контроля и управления на третьем уровне, указанные приборы выполнены унифицированными и содержат микроЭВМ, программное обеспечение которых реализует контроль и управление общей частью и индивидуальными частями торпедных аппаратов и пусковых установок средств самообороны, при этом выход пульта управления соединен с входом центрального прибора контроля и управления второго уровня, который подключен также к датчикам, сигнализаторам и исполнительным механизмам общей части торпедных аппаратов, пусковых установок средств самообороны и к входам приборов контроля и управления третьего уровня, подключенных также к датчикам, сигнализаторам и исполнительным механизмам индивидуальной части торпедных аппаратов, пусковых установок средств самообороны, а для ввода данных в торпедные аппараты и средства самообороны выходы упомянутых приборов контроля и управления третьего уровня соединены с разъемами ввода данных торпедных аппаратов и пусковых установок средств самообороны, при этом количество центральных приборов контроля и управления второго уровня пропорционально числу систем вооружения, а число приборов контроля и управления третьего уровня соответствует общему числу торпедных аппаратов, пусковых установок средств самообороны.
| СИСТЕМА УПРАВЛЕНИЯ ОРУЖИЕМ | 1999 |
|
RU2158024C1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ОГНЕМ РЕАКТИВНОЙ АРТИЛЛЕРИИ | 1998 |
|
RU2143133C1 |
| СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ КОМАНДИРА КОРАБЛЯ | 1996 |
|
RU2133498C1 |
| US 3779129 A, 18.12.1973 | |||
| US 3499363 A, 10.03.1970 | |||
| Gane^s Navy International | |||
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU102A1 |

