Предлагаемый комплекс относится к области диагностической техники и может быть использован для систематического диагностического контроля магистральных газопроводов и хранилищ, а именно для раннего обнаружения нарушений герметичности, повреждений и утечек в газопроводе, за счет обеспечения лучших условий выполнения мониторинга, повышения оперативности и достоверности измерения параметров состояния газовых трубопроводов с помощью диагностической аппаратуры, установленной на носитель - дистанционно пилотируемый летательный аппарат (ДПЛА).
Известны системы и устройства для дистанционного контроля состояния магистральных трубопроводов (патенты РФ №№2.017.138, 2.040.783, 2.091.759, 2.158.423, 2.200.900, 2.256.894, 2.509.002, 2.362.981; патенты США №№3.490.032, 3.808.519, 6.229.313, 6.766.226; патент EP №0.052.053; патент WO №0.008.435; журнал «Крылья России», 1998, М. Беспилотные самолеты «Пчелка-1Г», модели «Эксперт» и «Альбатрос», ОКБ им. А.С.Яковлева, и др.).
Из известных систем и устройств наиболее близким к предлагаемому является «Автоматический беспилотный диагностический комплекс» (патент РФ №2.256.894, G01M 3/00, 2003), который выбран в качестве прототипа.
Указанный комплекс обеспечивает обмен радиотелеметрической и командной информацией между дистанционно пилотируемым летательным аппаратом и наземным пунктом управления путем использования дуплексной радиосвязи на двух частотах ω1 и ω2 и сложных сигналов с фазовой манипуляцией.
Однако в приемниках радиостанций 15.1 и 15.2 радиотелеметрической системы 15 одно и то же значение второй промежуточной частоты ωпр2 может быть получено в результате приема сигналов на ω1 и ωз1, ω2 и ωз2, т.е.
ωпр2=ω1-ωГ1, ωпр2=ωГ1-ωЗ1,
ωпр2=ωГ2-ω2, ωпр2=ωЗ2-ωГ2.
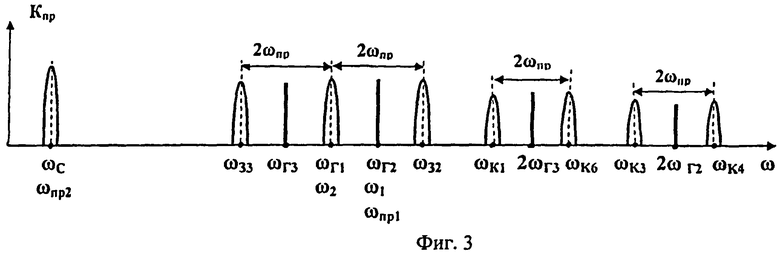
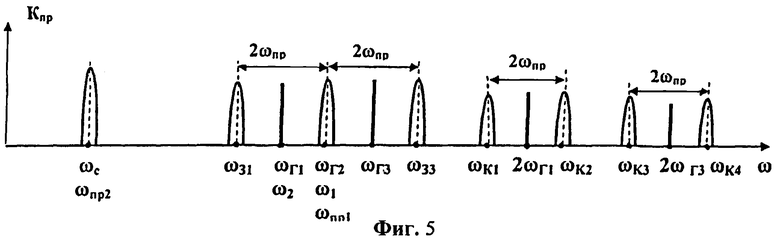
Следовательно, если частоты настройки ω1 и ω2 принять за основные каналы приема, то наряду с ними будут иметь место зеркальные каналы приема, частоты ωЗ1 и ωЗ2 которых отличаются от частот ω1 и ω2 на 2ωпр2 и расположены симметрично (зеркально) относительно частот ωГ1 и ωГ2 гетеродинов (фиг.3, 5). Преобразование по зеркальным каналам приема происходит с тем же коэффициентом преобразования Кпр, что и по основным каналам. Поэтому они наиболее существенно влияют на избирательность и помехоустойчивость приемников.
Кроме зеркальных существуют и другие дополнительные (комбинационные) каналы приема. В общем виде любой комбинационный канал приема имеет место при выполнении следующих условий:
 ,
,
 ,
,
где ωki - частота i-го комбинационного канала приема;
m, n, i - целые положительные числа.
Наиболее вредными комбинационными каналами являются каналы, образующиеся при взаимодействии первой гармоники частоты гетеродинов малого порядка (второй, третий и т.д.), так как чувствительность приемников по этим каналам близка к чувствительности по основным каналам. Так, четырем комбинационным каналам при m=1 и n=2 соответствуют частоты:
ωК1=2ωГ2-ωпр2, ωК2=2ωГ1+ωпр2,
ωК3=2ωГ2-ωпр2, ωК4=2ωГ2+ωпр2.
Наличие ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам, приводит к снижению избирательности и помехоустойчивости приемников радиостанций.
Технической задачей изобретения является повышение избирательности и помехоустойчивости приемников радиостанций путем подавления ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам.
Поставленная задача решается тем, что автоматический беспилотный диагностический комплекс (АБДК), содержащий в соответствии с ближайшим аналогом дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов, радиовысотомер малых высот и вычислитель действительных координат, подключенный к инерциальной навигационной системе и приемной аппаратуре спутниковой навигационной системы, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую систему командного радиоуправления и обзорную телевизионную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему обеспечения посадки с устройством торможения основных колес шасси, систему диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, при этом вычислитель действительных координат и первый вход-выход блока управления системой диагностики подключены к блоку управления бортовыми системами, второй вход-выход блока управления системой диагностики подключен к системе диагностики состояния газопровода, а третий вход-выход связан с системой командного радиоуправления, а также мобильный наземный пункт управления с устройствами связи и контроля, при этом радиотелеметрическая система выполнена в виде двух радиостанций, размещенных на дистанционно-пилотируемом летательном аппарате и наземном пункте управления соответственно, каждая из которых содержит последовательно включенные генератор высокой частоты, фазовый манипулятор, второй вход которого соединен с выходом источника дискретных сообщений и команд, первый смеситель, второй вход которого соединен с выходом первого гетеродина и первый усилитель второй промежуточной частоты, последовательно включенные перемножитель, второй вход которого соединен с выходом первого гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом второго гетеродина, а выход является выходом радиостанции, при этом частоты ωГ1 и ωГ2 гетеродинов разнесены на значение второй промежуточной частоты
ωГ2-ωГ1=2ωпр,
радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, излучает сложные сигналы с фазовой манипуляцией на частоте ω1=ωпр1=ωГ2, а принимаемый - на частоте ω2=ωГ1, а радиостанция, размещенная на наземном пункте управления, наоборот, излучает сложные сигналы с фазовой манипуляцией на частоте ω2, а принимает - на частоте ω1, отличается от ближайшего аналога тем, что приемник каждой радиостанции снабжен третьим смесителем, третьим гетеродином, вторым усилителем второй промежуточной частоты, коррелятором, пороговым блоком и ключом, причем к выходу второго усилителя мощности последовательно подключены третий смеситель, второй вход которого соединен с выходом третьего гетеродина, второй усилитель второй промежуточной частоты, коррелятор, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, пороговый блок и ключ, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, а выход подключен к первому входу перемножителя, частоты ωГ2 и ωГ3 второго и третьего гетеродинов приемника радиостанции, размещенной на дистанционно-пилотируемом летательном аппарате, разнесены на удвоенное значение второй промежуточной частоты
ωГ2-ωГ3=2ωпр2,
а частоты ωГ1 и ωГ3 второго и третьего гетеродинов приемника радиостанции, размещенной на наземном пункте управления, разнесены также на удвоенное значение второй промежуточной частоты
ωГ3-ωГ1=2ωпр2.
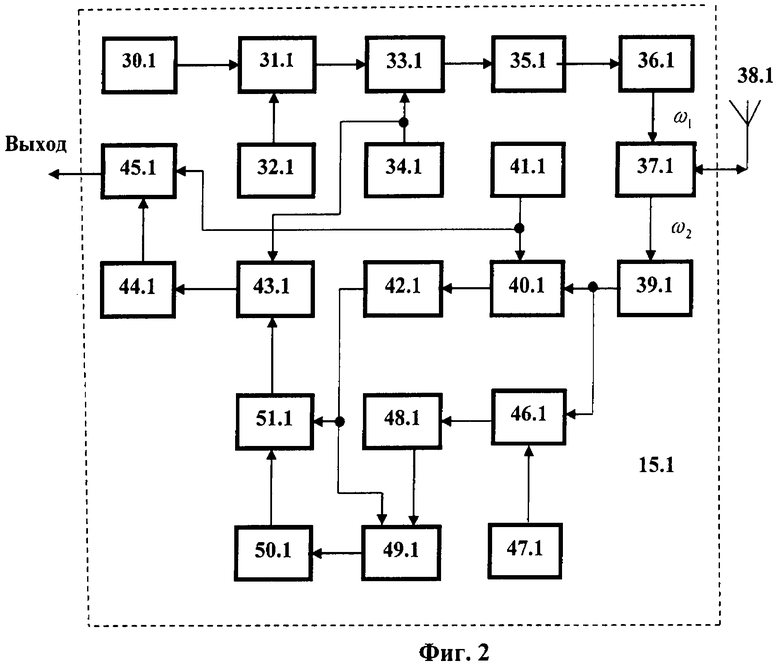
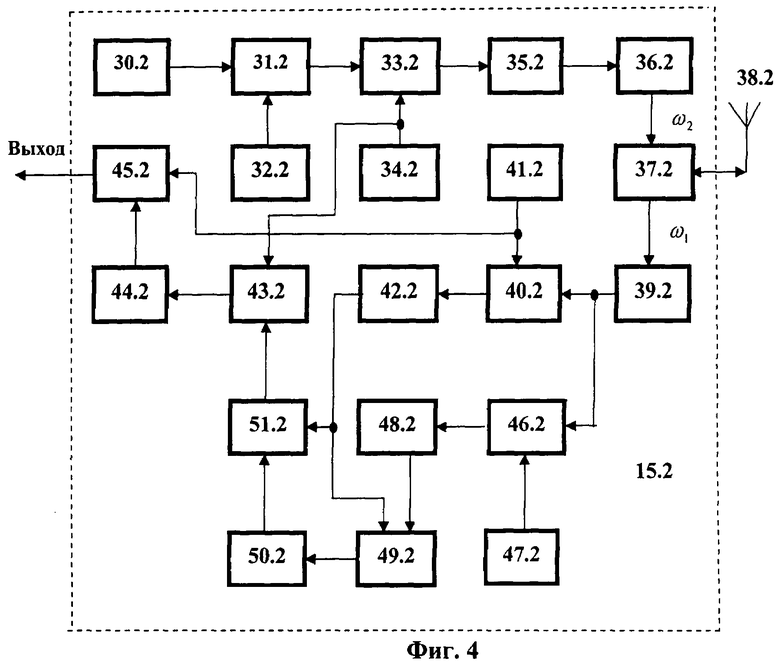
Структурная схема автоматического беспилотного диагностического комплекса представлена на фиг.1. Структурная схема радиостанции 15.1, размещенной на борту дистанционно-пилотируемого летательного аппарата, изображена на фиг.2. Структурная схема радиостанции 15.2, размещенной на наземном пункте 26 управления, изображена на фиг.4. Частотные диаграммы, иллюстрирующие процесс преобразования сигналов, показаны на фиг.3 и 5. Временные диаграммы, поясняющие принцип работы радиотелеметрической системы, изображены на фиг.6.
Автоматический беспилотный диагностический комплекс содержит систему 1 автоматического управления, спутники 2.i (i=1, 2, …, 24) глобальной навигационной системы ГЛОНАСС или НАВСТАР, навигационную систему 3, инерциальную навигационную систему 4, приемную аппаратуру 5 спутниковой навигационной системы ГЛОНАСС или НАВСТАР, вычислитель 6 действительных координат спутниковой навигационной системы, радиомаяк 7, систему 8 воздушно-скоростных сигналов, малогабаритный радиовысотомер 9 малых высот, систему 10 автоматического дистанционного управления, систему 11 команд радиоуправления, информационно-логический блок 12, приемную аппаратуру 13 командного радиооборудования, обзорную телевизионную систему 14, систему 15 радиотелеметрии, систему 16 автоконтроля работы бортовых систем ДПЛА с вычислителем, систему 17 управления двигателем, вычислитель 18 системы автоматического управления, радиоретранслятор 19, блок 20 управления бортовыми системами, бортовой накопитель 21 информации, систему 22 посадки и выпуска парашюта, блок 23 управления системой диагностики состояния магистральных газопроводов, систему 24 диагностики состояния магистральных газопроводов, радиовысотомер 25, наземный пункт 26 управления, наземный пульт 27 управления, стартовую катапульту и систему 28 спасения, рули 29 направления.
Радиотелеметрическая система 15 содержит две радиостанции 15.1 и 15.2, размещенные на дистанционно-пилотируемом летательном аппарате и наземном пункте 26 управления соответственно, каждая из которых содержит последовательно включенные генератор 30.1(30.2) высокой частоты, фазовый манипулятор 31.1(31.2), второй вход которого соединен с выходом источника 32.1(32.2) дискретных сообщений и команд, первый смеситель 33.1(33.2), второй вход которого соединен с выходом первого гетеродина 34.1(34.2), усилитель 35.1(35.2) первой промежуточной частоты, первый усилитель 36.1(36.2) мощности, дуплексер 37.1(37.2), вход-выход которого связан с приемо-передающей антенной 38.1(38.2), второй усилитель 39.1(39.2) мощности, второй смеситель 40.1(40.2), второй вход которого соединен с выходом первого гетеродина 41.1(41.2), первый усилитель 42.1(42.2) второй промежуточной частоты, коррелятор 51.1(51.2), второй вход которого соединен с выходом первого усилителя 42.1(42.2) второй промежуточной частоты, перемножитель 43.1(43.2), второй вход которого соединен с выходом первого гетеродина 34.1(34.2), полосовой фильтр 44.1(44.2) и фазовый детектор 45.1(45.2), второй вход которого соединен с выходом второго гетеродина 41.1(41.2), а выход является выходом радиостанции. К выходу второго усилителя 39.1(39.2) мощности последовательно подключены третий смеситель 46.1(46.2), второй вход которого соединен с выходом третьего гетеродина 47.1(47.2), и второй усилитель 48.1(48.2) второй промежуточной частоты, выход которого соединен с вторым входом коррелятора 49.1(49.2).
Автоматический беспилотный диагностический комплекс содержит дистанционно-пилотируемый летательный аппарат, планер которого выполнен из дешевых композиционных материалов.
Аэродинамическая схема ДПЛА содержит моноплан с высокорасположенным крылом небольшой стреловидности, двухбалочным хвостовым оперением и расположенным в задней части фюзеляжа двухцилиндровым двухтактным поршневым двигателем с трехлопастным толкающим воздушным винтом фиксированного шага. В центроплане крыла размещаются мягкие топливные баки. В центральной части центроплана размещается посадочный парашют. Хвостовое оперение выполнено двухкилевым. Между килями располагается стабилизатор.
В передней части фюзеляжа расположен отсек полезной нагрузки. Двигатель выполнен поршневым с трехлопастным винтом фиксированного шага, подключенным к системе 17 управления двигателем.
ДПЛА имеет трехколесное шасси. Основные колеса имеют тормозные устройства, обеспечивающие одновременное и дифференциальное торможение, связанные с системой 22 посадки и выпуска парашюта, подключенной к блоку 20 управления бортовыми системами.
Бортовые системы ДПЛА содержат систему 1 автоматического управления, состоящую из двух систем.
Первая система - навигационная 3, в состав которой включены: инерционная навигационная система (ИНС) (4), приемная аппаратура 5 спутниковой навигационной системы (СНС), связанной со спутниками 2.i (i=1, 2, …, 24), система 8 воздушно-скоростных сигналов, подключенная к вычислителю 18 САУ, малогабаритный высотомер 9 малых высот, подключенные к блоку 20 управления бортовыми системами.
Вторая система - система 10 автоматического дистанционного управления, в состав которой входит система 13 командного радиоуправления, обзорная телевизионная система 14. Система 17 управления двигателем подключена к системе 11 команд радиоуправления, которая соединена с выходом блока 20. Радиотелеметрическая система 15 соединена с системой 16 автоконтроля, подключенной к входу блока 20 управления бортовыми системами, входы вычислителя 18 САУ подключены к системе 8 воздушно-скоростных сигналов, информационно-логический блок 12 - к системе 11 команд радиоуправления, а выход вычислителя 18 связан с рулями направления 29. Блок 20 управления бортовыми системами связан с выходами радиовысотомера 25, бортового накопителя 21 информации, радиомаяка 7 и выходом системы 22 посадки и выпуска парашюта, подключенной к системе 11 команд радиоуправления, блок 23 управления системой диагностики, вычислителя 6 действительных координат, входы которого связаны с ИНС 4 и приемной аппаратурой 5 СНС. Система 24 диагностики состояния магистральных газопроводов подключена своими входами-выходами к блоку 23 управления системой диагностики.
Наземная часть содержит радиотелеметрическую систему 15, телевизионную систему 14, стартовую катапульту 28, связанную с наземным пультом 27 управления наземного пункта 26.
В блоке 23 управления системой диагностики встроены блок контроля функционального состояния диагностической системы, блок накопления диагностической информации, блок включения/отключения, блок включения обогрева диагностической аппаратуры, блок вычислений.
Система 24 диагностики состояния магистральных газопроводов содержит магнитометр, соединенный с пассивными магнитометрическими датчиками, тепловизор, лазерный газоанализатор, телевизионную систему и соединена с блоком 23 управления системой диагностики.
Выполнение полета и диагностика состояния газовых трубопроводов с помощью АБДК осуществляется следующим образом.
Автоматический беспилотный диагностический комплекс обеспечивает наилучшие условия выполнения мониторинга и измерения параметров состояния газовых трубопроводов с помощью бортовой аппаратуры. Навигационная система 3 в составе ИНС 4, приемной аппаратуры 5 СНС, системы 8 воздушно-скоростных сигналов, радиовысотомера 9 малых высот обеспечивает стабилизацию углового положения ДПЛА на всех режимах полета, управление полетом ДПЛА по заданному программой маршруту, выдачу потребителям текущих координат ДПЛА и другой навигационной информации.
Система 10 автоматического дистанционного управления в составе блока 11 команд радиоуправления и логического блока 12, приемной аппаратуры 13 командного радиоуправления, обзорной телевизионной системы 14 обеспечивает:
- коррекцию или изменение маршрута полета ДПЛА;
- управление системами ДПЛА при выполнении автоматического взлета по-самолетному;
- управление системами ДПЛА при выполнении штатной, вынужденной или аварийной посадки по-самолетному;
- автоматическое пилотирование ДПЛА, прекращение выполнения задания и возврат на площадку посадки, в случае необходимости;
- обеспечивает безопасность полета ДПЛА и газопроводов в случае остановки двигателя, выхода из строя командной радиолинии управления.
В чрезвычайных обстоятельствах система переключает управление полетом ДПЛА на себя и работает автономно по записанной в БЦВМ 21 логике в соответствии с конкретными отказами.
Система обеспечения посадки ДПЛА включает парашютную систему, трехколесное шасси. Система обеспечивает выполнение посадки ДПЛА по-самолетному на подготовленную площадку.
Диагностирование выполняют с помощью установленных на ДПЛА газоанализатора, тепловизора, магнитометрической системы контроля катодной защиты трубопровода, с помощью телевизионной системы. Тепловизор позволяет получать видимое изображение исследуемого трубопровода по его собственному тепловому (ИК) излучению, определяя формы и места положения слабонагретых и замаскированных трубопроводов в дневных и ночных условиях. Тепловые аномалии, создаваемые магистральными трубопроводами, связаны с транспортом нагретого газа и утечками из трубопровода.
Для работы системы диагностики обеспечивают ввод данных о точной высоте полета над трубой с помощью радиовысотомера, об угловых координатах положения планера, о текущих координатах местности, поступающих из НО в вычислитель блока управления системой диагностики состояния магистральных газопроводов и далее в блоки вычисления и накопления.
В процессе полета обзорная телевизионная система передает на наземный пункт управления обзор местности, передает изображение, текущие координаты полета, информацию о работе и отказах бортовых систем. Оператор наблюдает на видеокамере изображение трубы относительно ДПЛА по визуальной сетке. Изображением желаемой траектории полета является визирная сетка, перекрестие, направленное на цель, которую необходимо выдерживать. Объективы тепловизора, телевизионной системы автоматически закрываются с помощью шторок при взлете и посадке. Через командную радиолинию с земли оператор корректирует полет ДПЛА, осуществляет контроль функционального состояния диагностической системы, при необходимости ее обогрев и управление диагностической системой. В результате этого происходят измерения полей температурного контраста тепловизионной системой, затем измерение концентрации трансформируемого газа газоанализатором. Определение магнитного поля регистрируют в соответствии с линейным положением магнитометра по отношению к трубопроводу. При этом скорость сканирования тепловизионной и телевизионной систем устанавливается по сигналу, поступающему из блока 23 управления, определяемому по соотношению скорости полета к высоте. Полученные измерения диагностической системы и параметры траектории полета поступают в блок вычислителя и затем в блок накопления диагностической информации, встроенные в блок 23 управления диагностической системы.
В вычислителе 6 используется комплексная обработка информации (КОИ), результатом которой являются действительные значения параметров движения ЛА.
Повышение точности формирования действительных значений пилотажно-навигационных параметров достигается использованием оптимальной КОИ с реализацией фильтра Калмана.
В приемной аппаратуре 5 СНС измеряется псевдодальность по оценке задержки огибающей псевдослучайных последовательностей и радиальная псевдоскорость по оценке доплеровского смещения частоты несущей. В сигналы кодов закладывается соответствующий массив служебной информации, содержащей эфемериды, альманах, частотно-временные поправки, метки времени, сведения о работоспособности бортовой аппаратуры по результатам измерений. В приемной аппаратуре 5 СНС решается навигационно-временная задача.
Управление АБДК осуществляется с помощью системы 18 автоматического управления, обеспечивающей отработку и стабилизацию пространственной траектории, отслеживающей траекторию движения АБДК, и автомата управления тягой двигателей, выдерживающего заданную скорость.
Радиостанции 15.1 и 15.2 радиотелеметрической системы 15 работают следующим образом.
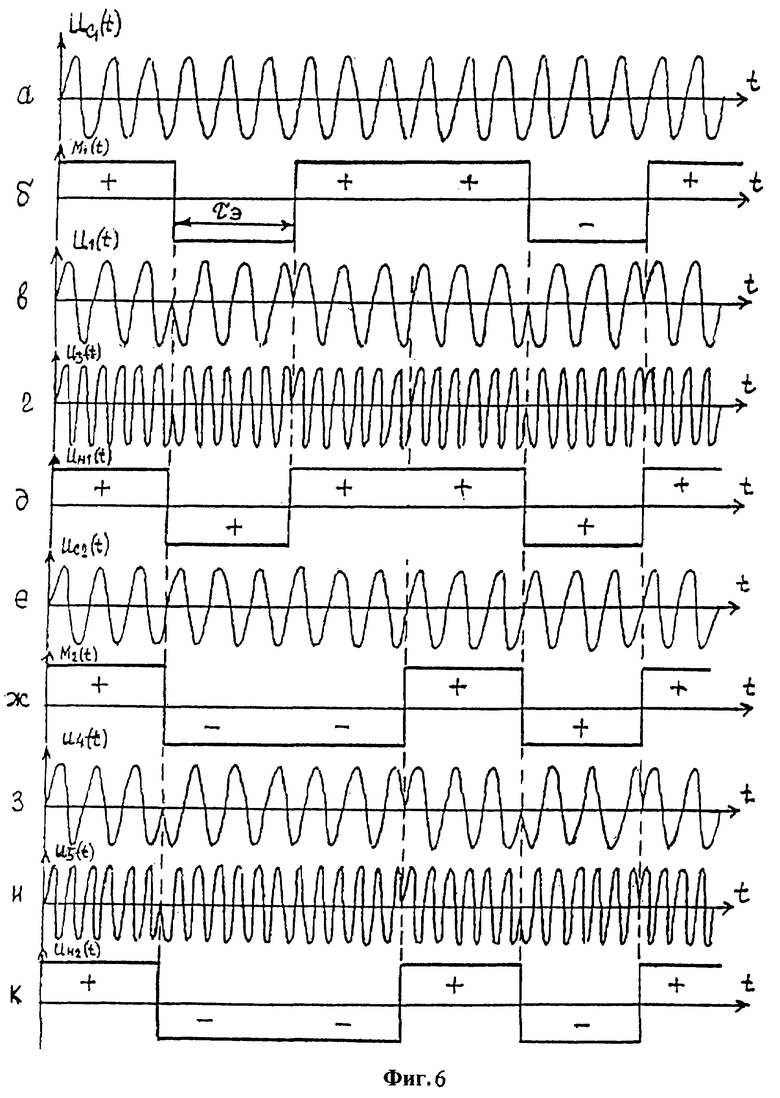
Генератором 30.1 высокой частоты формируют гармоническое колебание (фиг.5, а)
uc1(t)=Uc1cos(ωct+φс1), 0≤t≤Tc1,
где Uc1, ωс, φс1, Tc1 - амплитуда, несущая частота, начальная фаза и длительность колебания,
которое поступает на первый вход фазового манипулятора 31.1, на второй вход которого подается модулирующий код M1(t) (фиг.5, б) с выхода источника 32.1 дискретных сообщений и команд. В качестве источника 32.1 дискретных сообщений и команд могут быть текущие координаты ДПЛА, информация о работе и отказах бортовых систем и т.п. На выходе фазового манипулятора 31.1 образуется сложный сигнал с фазовой манипуляцией (ФМн) (фиг.5, в)
u1(t)=Uc1cos[ωct+φk1(t)], 0≤t≤Tc1,
где φk1(t)={0, π} - манипулированная составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t) (фиг.5, б), причем φk1(t)=const при kτЭ<t<(k+1)τЭ и может изменяться скачком при t=kτЭ, т.е. на границах между элементарными посылками (n=1, 2, …, N1-1);
τЭ, N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc1 (Tc1=τЭN1),
который поступает на первый вход смесителя 33.1, на второй вход которого подается напряжение гетеродина 34.1
uГ1(t)=UГ1cos(ωГ1t+φГ1).
На выходе смесителя 33.1 образуются напряжения комбинационных частот. Усилителем 35.1 выделяется напряжение первой промежуточной (суммарной) частоты
uпр1(t)=Uпр1cos[ωпр1t+φk1(t)+φпр1], 0≤t≤Тс1,
где  ;
;
К1 - коэффициент передачи смесителя;
ωпр1=ωc+ωГ1 - первая промежуточная частота;
φпр1=φс1+φГ1.
Это напряжение после усиления в усилителе 36.1 мощности через дуплексер 37.1 излучается приемо-передающей антенной 38.1 в эфир на частоте ω1=ωпр1, улавливается приемо-передающей антенной 38.2 и через усилитель 39.2 мощности поступает на первые входы смесителей 40.2 и 46.2, на вторые входы которых подаются напряжения гетеродинов 41.2 и 47.2 соответственно.
uГ1(t)=UГ1cos(ωГ1t+φГ1),
uГ3(t)=UГ3cos(ωГ3t+φГ3).
Причем частоты ωГ1 и ωГ3 гетеродинов разнесены на удвоенное значение второй промежуточной частоты
ωГ3-ωГ1=2ωпp2
и выбраны симметричными относительно частоты ω1 принимаемого сигнала (фиг.5)
ω1-ωГ1=ωГ3-ω1=ωпр2.
Это обстоятельство приводит к удвоению числа дополнительных каналов приема, но создает благоприятные условия для их подавления за счет корреляционной обработки канальных напряжений.
На выходе смесителей 40.2 и 46.2 образуются напряжения комбинационных частот. Усилителями 42.2 и 48.2 выделяются напряжения второй промежуточной (разностной) частоты:
uпp2(t)=Uпp1cos[ωпр2t+φk1(t)+φпр2],
uпp3(t)=Uпp2cos[ωпр2t+φk1(t)+φпр3], 0≤t≤Tc1,
где  ;
;
ωпр2=ω1-ωГ1=ωГ3-ω1 - вторая промежуточная (разностная) частота;
φпр2=φпр1-φГ1; φпр3=φГ3-φпр1.
Напряжения uпр2(t) и uпр3(t) поступают на два входа коррелятора 49.2, на выходе которого формируется напряжение U(τ), пропорциональное корреляционной функции R(t), которое сравнивается с пороговым напряжением Uпор в пороговом блоке 50.2. Пороговый уровень Uпор превышается только при максимальном напряжении Umax(τ). Так как канальные напряжения uпр2(t) и uпр3(t) образуются одним и тем же ФМн-сигналом, принимаемым по двум каналам на одной и той же частоте ω1, то между указанными канальными напряжениями существует сильная корреляционная связь. Кроме того, корреляционная функция ФМн-сигналов имеет ярко выраженный главный лепесток и относительно низкий уровень боковых лепестков. Поэтому на выходе коррелятора 49.2 формируется максимальное напряжение Umax(τ), которое превышает пороговый уровень Uпор в пороговом блоке 50.2
[Umax(τ)>Uпор].
При превышении порогового уровня Uпор в пороговом блоке 50.2 формируется постоянное напряжение, которое поступает на управляющий вход ключа 51.2 и открывает его. В исходном состоянии ключ 51.2 всегда закрыт.
При этом напряжение Uпр2(t) с выхода первого усилителя 42.2 второй промежуточной частоты поступает через открытый ключ 51.2 на первый вход перемножителя 43.2. На второй вход перемножителя 43.2 подается напряжение гетеродина 34.2
uГ2(t)=UГ2cos(ωГ2t+φГ2).
На выходе перемножителя 43.2 образуется напряжение (фиг.6, г)
u2(t)=U2cos[ωГ1t-φk1(t)+φГ1], 0≤t≤Tc1,
где  ;
;
К2 - коэффициент передачи перемножителя,
которое выделяется полосовым фильтром 44.2 и поступает на первый (информационный) вход фазового детектора 45.2, на второй (опорный) вход которого подается напряжение uГ1(t) гетеродина 41.2. На выходе фазового детектора 45.2 образуется низкочастотное напряжение (фиг.6, д)
uH1(t)=UH1cosφK1(t), 0≤t≤TС1,
где  ;
;
К3 - коэффициент передачи фазового детектора,
пропорциональное модулирующему коду M1(t).
Описанная выше работа приемника радиостанции 15.2 соответствует случаю приема полезных ФМн-сигналов по основному каналу на частоте ω1=ωПР1 (фиг.5).
Если ложный сигнал (помеха) принимается по первому зеркальному каналу на частоте ωЗ1
ωЗ1(t)=UЗ1cos(ωЗ1t+φЗ1), 0≤t≤ТЗ1,
то усилители 42.1 и 48.2 второй промежуточной частоты выделяют следующие напряжения:
uПР4(t)=UПР4cos(ωПР2t+φПР4),
uПР5(t)=UПР5cos(3ωПР2t+φПР5), 0≤t≤TЗ1,
где  ;
;
 ;
;
ωПP2=ωГ1-ωЗ1;
3ωПР2 =ωГ3 -ωЗ1;
φПР4=φГ1-φЗ1; φПР5 =φГ3-φЗ1.
Однако только напряжение uпр4(t) попадает в полосу пропускания усилителя 42.2 второй промежуточной частоты, выходное напряжение коррелятора 49.2 равно нулю, ключ 51.2 не открывается и ложный сигнал (помеха), принимаемый по первому зеркальному каналу на частоте ωЗ1, подавляется.
По аналогичной причине подавляется и ложный сигнал (помеха), принимаемый по третьему зеркальному каналу на частоте ωЗ3 и по любому другому дополнительному каналу приема.
Если ложные сигналы (помехи) одновременно принимаются по первому и третьему зеркальным каналам:
uЗ1(t)=UЗ1cos(ωЗ1t+φЗ1), 0≤t≤ТЗ1,
uЗ3(t)=UЗ3cos(ωЗ3t+φЗ3), 0≤t≤ТЗ3,
тo усилителями 42.2 и 48.2 второй промежуточной частоты выделяются следующие напряжения
uПР4(t)=UПР4cos(ωПР2t+φПР4), 0≤t≤ТЗ1,
uПР6(t)=UПР6cos(ωПР2t+φПР6), 0≤t≤ТЗ6,
где  ;
;
которые подаются на два входа коррелятора 49.2. Но ключ 51.2 в этом случае не открывается. Это объясняется тем, что разные ложные сигналы (помехи) uЗ1(t) и uЗ3(t) принимаются на разных частотах ωЗ1 и ωЗ3, поэтому между канальными напряжениями существует слабая корреляционная связь. Кроме того, следует отметить, что корреляционная функция помех не имеет ярко выраженного главного лепестка, как это имеет место у сложных ФМн-сигналов.
Выходное напряжение U(τ) коррелятора 49.2 в этом случае не достигает максимального значения и не превышает порогового уровня Uпор в пороговом блоке 50.2, ключ 51.2 не открывается и ложные сигналы (помехи), принимаемые одновременно по первому ωЗ1 и третьему ωЗ3 зеркальным каналам, подавляются.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые одновременно по двум другим дополнительным каналам.
На наземном пункте 26 управления формируется с помощью генератора 30.2 высокой частоты гармоническое колебание (фиг.5, е)
uc2(t)=Uc2cos(ωct+φc2), 0≤t≤Тc2,
которое поступает на первый вход фазового манипулятора 31.2, на второй вход которого подается модулирующий код M2(t) (фиг.5, ж) с выхода источника 32.2 дискретных сообщений и команд. В качестве источника дискретных сообщений могут быть сигналы запроса о работе различных бортовых систем, команды на включение или выключение блоков и т.д. На выходе фазового манипулятора 31.2 образуется сложный сигнал с фазовой манипуляцией (фиг.5, з)
u3(t)=Uс2cos[ωct+φk2(t)+φс2], 0≤t≤Tс2,
который поступает на первый вход смесителя 33.2, на второй сход которого подается напряжение uГ2(t) гетеродина 34.2. На выходе смесителя 33.2 образуются напряжения комбинационных частот. Усилителем 35.2 выделяется напряжение промежуточной (разностной) частоты
uпр5(t)=Uпр3cos[ωпрt-φk2(t)+φпр], 0≤t≤Tс2,
где  ,
,
Это напряжение после усиления в усилителе 36.2 мощности через дуплексер 37.2 излучается приемо-передающей антенной 38.2 на частоте ω2 в эфир, улавливается приемо-передающей антенной 38.1 и через усилитель 39.1 мощности поступает на первые входы смесителей 40.1 и 46.1, на вторые входы которых подаются напряжения гетеродина 41.1 и 47.1 соответственно:
uГ2(t)=UГ2cos[ωГ2t+φГ2],
uГ3(t)=UГ3cos[ωГ3t+φГ3].
Причем частоты ωГ2 и ωГ3 гетеродинов разнесены на удвоенное значение второй промежуточной частоты
ωГ2-ωГ3=2ωПР2
и выбраны симметричными относительно частоты ω2 принимаемого сигнала (фиг.3)
ω2-ωГ3=ωГ2-ω2=ωПР2.
Это обстоятельство приводит к удвоению числа дополнительных каналов приема, но создает благоприятные условия для их подавления за счет корреляционной обработки канальных напряжений.
На выходе смесителей 40.1 и 46.1 образуются напряжения комбинационных частот. Усилителями 42.1 и 48.1 выделяются напряжения второй промежуточной (разностной) частоты:
uПР8(t)=UПР8cos[ωПР2t-φК2(t)+φПР8],
uПР9(t)=UПР9cos[ωПР2t+φК2(t)+φПР9], 0≤t≤TК2,
где  ;
;
 ;
;
ωПР2=ω2-ωU3=ωГ32-ω2 - вторая промежуточная (разностная) частота;
ωПР8=φПР7-φГ3; φПР9=φГ2-φПР7.
Напряжения Uпр8(t) и Uпр9(t) поступают на два входа коррелятора 49.1, на выходе которого формируется напряжение U(τ), пропорциональное корреляционной функции R(τ), которое сравнивается с пороговым напряжением Uпор в пороговом блоке 50.1. В этом случае ключ 51.1 также открывается и напряжение uпр8(t) с выхода усилителя 42.1 через открытый ключ 51.1 поступает на первый вход перемножителя 43.1, на второй вход которого подается напряжение uГ1(t) гетеродина 34.1. На выходе перемножителя 43.1 образуется напряжение (фиг.6, и)
u4(t)=U4cos[ωГ2t-φК2(t)+φГ2], 0≤t≤TС2,
где  ,
,
которое выделяется полосовым фильтром 44.1 и поступает на первый (информационный) вход фазового детектора 45.1, на второй (опорный) вход которого подается напряжение uГ2(t) гетеродина 41.1. На выходе фазового детектора 45.1 образуется низкочастотное напряжение (фиг.6, к)
uН2(t)=UН2cos+φk2(t), 0≤t≤TС2,
где  ,
,
пропорциональное модулирующему коду M2(t).
Описанная выше работа приемника радиостанции 15.1 соответствует случаю приема полезных ФМн-сигналов по основному каналу на частоте ω2 (фиг.3).
Если ложный сигнал (помеха) принимается по третьему зеркальному каналу на частоте ωЗ3
uЗ3(t)=UЗ3cos(ωЗ3t+φЗ3), 0≤t≤TЗ3,
то усилителями 42.1 и 48.1 второй промежуточной частоты выделяются следующие напряжения:
uпр10(t)=Uпр10cos(ωпр2t+φпр10],
uпр11(t)=Uпр11cos[3ωпр2t+φпр11], 0≤t≤TЗ3,
где  ;
;
 ;
;
ωпр2=ωГ3-ωЗ3;
3ωпр2=ωГ2-ωЗ3;
φпр10=φГ2-φЗ3; φпр11=φГ2-φГ3.
Однако только напряжение Uпр10(t) попадает в полосу пропускания усилителя 42.1 второй промежуточной частоты. Выходное напряжение коррелятора 49.1 равно нулю, ключ 51.1 не открывается и ложный сигнал (помеха), принимаемый по третьему зеркальному каналу на частоте ωЗ3, подавляется.
Подавляются и другие ложные сигналы (помехи), принимаемые по другим дополнительным каналам раздельно или одновременно.
Радиостанция 15.1, размещаемая на дистанционно-пилотируемом летательном аппарате, излучает сложные сигналы с фазовой манипуляцией на частоте ω1=ωпр1=ωГ2, а принимает - на частоте ω2=ωГ1. Радиостанция 15.2, размещаемая на наземном пункте 26 управления, наоборот, излучает сложные сигналы с фазовой манипуляцией на частоте ω2, а принимает - на частоте ω1.
Автоматический беспилотный диагностический комплекс позволяет получать визуальную информацию о состоянии магистральных газопроводов в сложных метеоусловиях, в любое время суток при полете ДПЛА на высоте 50 м со скоростью 120…140 км/час над газопроводом в равнинной местности по координатам с использованием СНС, что уменьшает ошибки, не превышающие по боковому отклонению ±10 м и по высоте ±20 м.
В каждом полете ДПЛА продиагностируется до 450 км газопровода. Обнаружение мест утечек газа обеспечивается диагностической системой при расходе газа 20…50 м3/cyтки, выявляются разрушения покрытий в трубе площадью от 1 м и более. Полеты совершают в оба направления магистрали на удаление до 225 км (до следующей через одну станцию газоперекачки) с возвратом на площадку старта.
Автоматический беспилотный дистанционный комплекс по сравнению с прототипом обеспечивает надежный обмен радиотелеметрической информацией между дистанционно-пилотируемым летательным аппаратом и наземным пунктом управления. Это достигается выполнением радиотелеметрической системы в виде двух радиостанций, размещенных на дистанционно-пилотируемом летательном аппарате и наземном пункте управления соответственно, между которыми устанавливается дуплексная радиосвязь на двух частотах с использованием сложных сигналов с фазовой манипуляцией.
Кроме того, указанная система позволяет надежно дублировать команды управления и сообщения, которыми обмениваются дистанционно-управляемый летательный аппарат и наземный пункт управления, что обеспечивает более эффективный контроль за состоянием магистральных газопроводов.
Сложные ФМн-сигналы обладают высокой помехоустойчивостью, энергетической и структурной скрытностью. Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложный ФМн-сигнал в точке приема может оказаться замаскированным шумами и помехами. Причем энергия сложного ФМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области, так что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами измерений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку сложных ФМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемника. Сложные ФМн-сигналы позволяют применять новый вид селекции - структурную селекцию.
Таким образом, предлагаемый автоматический беспилотный диагностический комплекс по сравнению с прототипом обеспечивает повышение избирательности и помехоустойчивости приемников радиостанций радиотелеметрической системы. Это достигается путем подавления ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам, за счет корреляционной обработки канальных напряжений. При этом частоты ωГ1, ωГ2 и ωГ3 гетеродинов разнесены на удвоенное значение второй промежуточной частоты:
ωГ3-ωГ1=2ωпр2,
ωГ2-ωГ3=2ωпp2,
и выбраны симметричными относительно частот ω1 и ω2 основных каналов приема:
ω1-ωГ1=ωГ3-ω1=ωпр2,
ω2-ωГ3=ωГ2-ω2=ωпр2.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2446481C2 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2309431C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ДВИЖЕНИЯ СПЕЦИАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2582502C2 |
| ЭЛЕКТРОННЫЕ ШАХМАТНЫЕ ЧАСЫ | 2013 |
|
RU2527662C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2389040C1 |
| ЗАПРОСНЫЙ СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ | 2009 |
|
RU2429503C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
Предлагаемый комплекс относится к области диагностической техники и может быть использован для систематического диагностического контроля состояния магистральных газопроводов и хранилищ. Комплекс содержит систему автоматического управления, спутники глобальной навигационной системы «НАВСТАР» или «ГЛОНАСС», навигационную систему, инерциальную навигационную систему, приемную аппаратуру навигационных сигналов, вычислитель действительных координат спутниковой навигационной системы, радиомаяк, систему воздушно-скоростных сигналов, малогабаритный радиовысотомер малых высот, систему автоматического дистанционного управления, систему команд радиоуправления, информационно-логический блок, приемную аппаратуру командного радиоуправления, обзорную телевизионную систему, систему радиотелеметрии, систему автоконтроля работы бортовых систем летательного аппарата с вычислителем, систему управления двигателем, вычислитель системы автоматического управления, радиоретранслятор, блок управления бортовыми системами, бортовой накопитель информации, систему посадки и выпуска парашюта, блок управления системой диагностики состояния магистральных газопроводов, систему диагностики состояния магистральных газопроводов, радиовысотомер, наземный пункт управления, наземный пульт управления, стартовую катапульту и систему спасения, рули направления. Радиотелеметрическая система содержит две радиостанции, каждая из которых состоит из приемо-передающей антенны, генератора высокой частоты, фазового манипулятора, трех смесителей, трех гетеродинов, источника дискретных сообщений и команд, двух усилителей мощности, двух усилителей промежуточной частоты, полосового фильтра, дуплексера, коррелятора, порогового блока, ключа, фазового детектора и перемножителя. Техническим результатом изобретения является повышение избирательности и помехоустойчивости приемников радиостанций. 6 ил.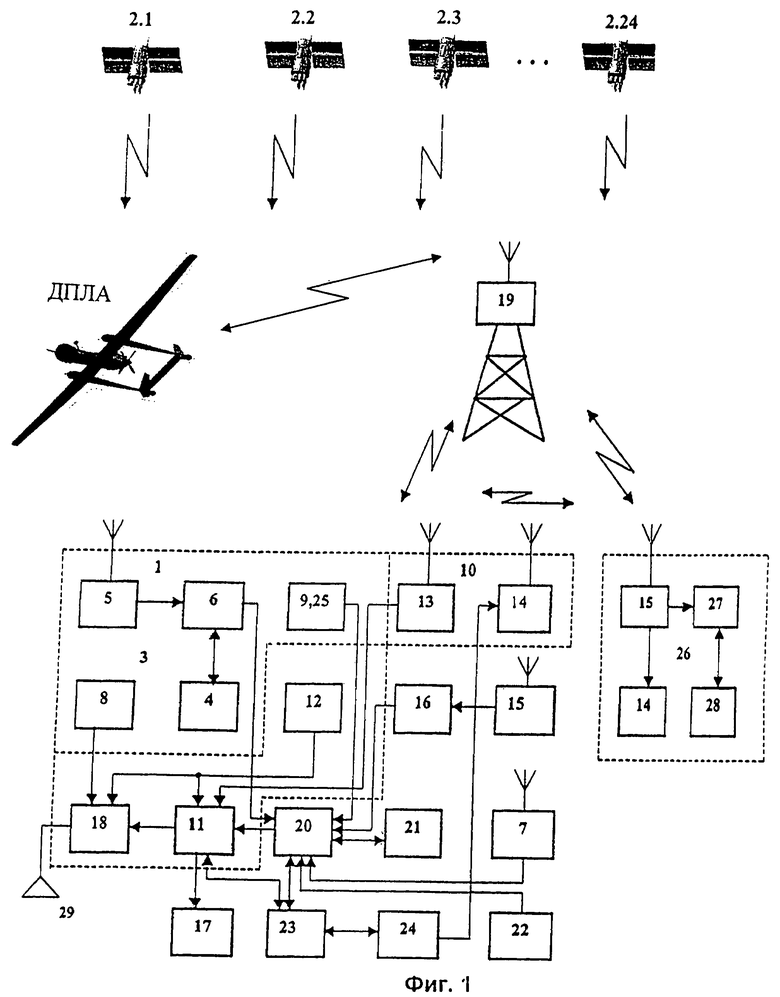
Автоматический беспилотный диагностический комплекс, содержащий дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов, радиовысотомер малых высот и вычислитель действительных координат, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую приемную аппаратуру командного радиоуправления и обзорную телевизионную систему, радиоретрансляционную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему посадки и выпуска парашюта, систему управления двигателем, вычислитель системы автоматического управления, радиомаяк, систему диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, а также мобильный наземный пункт управления, содержащий радиотелеметрическую систему, телевизионную систему, стартовую катапульту и пульт управления, при этом радиотелеметрическая система выполнена в виде двух радиостанций, размещенных на дистанционно-пилотируемом летательном аппарате и наземном пункте управления соответственно, каждая из которых содержит последовательно включенные генератор высокой частоты, фазовый манипулятор, второй вход которого соединен с источником дискретных сообщений и команд, первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, и первый усилитель второй промежуточной частоты, последовательно подключенные перемножитель, второй вход которого соединен с выходом первого гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом второго гетеродина, а выход является выходом радиостанции, при этом частоты ωГ1 и ωГ2 гетеродинов разнесены на значение второй промежуточной частоты ωГ2-ωГ1=2ωпр2, радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, излучает сложные сигналы с фазовой манипуляцией на частоте ω1=ωпр1=ωГ2, а принимает на частоте ω2=ωГ1, а радиостанция, размещенная на наземном пункте управления, наоборот, излучает сложные сигналы с фазовой манипуляцией на частоте ω2, а принимает на частоте ω1, отличающийся тем, что приемник каждой радиостанции снабжен третьим смесителем, третьим гетеродином, вторым усилителем второй промежуточной частоты, коррелятором, пороговым блоком и ключом, причем к выходу второго усилителя мощности последовательно подключены третий смеситель, второй вход которого соединен с выходом третьего гетеродина, второй усилитель второй промежуточной частоты, коррелятор, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, пороговый блок и ключ, второй вход которого соединен с выходом первого усилителя второй промежуточной частоты, а выход подключен к первому входу перемножителя, частоты ωГ2 и ωГ3 второго и третьего гетеродинов приемника радиостанции, размещенной на дистанционно-пилотируемом летательном аппарате, разнесены на удвоенное значение второй промежуточной частоты ωГ2-ωГ3=2ωпр2, а частоты ωГ1 и ωГ3 второго и третьего гетеродинов приемника радиостанции, размещенной на наземном пункте управления, разнесены также на удвоенное значение второй промежуточной частоты ωГ3-ωГ1=2ωпр2.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2424539C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2362981C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ, ПРЕИМУЩЕСТВЕННО НЕФТЕПРОВОДАХ | 2002 |
|
RU2234637C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2000 |
|
RU2190152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2004 |
|
RU2258865C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| US 20040263852 A1, 30.12.2004 | |||
| US 20060225507 A1, 12.10.2006 | |||
| Модельная оснастка | 1986 |
|
SU1416258A1 |

