Предлагаемый комплекс относится к области диагностической техники, а именно воздушным мониторингам с применением беспилотных летательных аппаратов (БЛА), и может быть использован для систематического дистанционного контроля (мониторинга) состояния локальных, региональных и магистральных нефте- и газопроводов, хранилищ, высоковольтных ЛЭП, особо важных объектов, государственной границы в горной местности и других протяженных объектов.
Известны системы и устройства для дистанционного контроля состояния магистральных трубопроводов (патенты РФ №№2017138, 2040783, 2079981, 2091759, 2158423, 2200900, 2256894, 2509002, 2362981, 2343438; патенты США №№3490032, 3808519, 6229313, 6766226; патент ЕР №0052053; патент WO №0008435; журнал «Крылья родины», 1998, М. Беспилотные самолеты "Пчелка-1T", модели "Эксперт" и "Альбатрос", ОКБ им. А.С.Яковлева и другие).
Из известных систем и устройств наиболее близким к предлагаемому является «Автоматический беспилотный диагностический комплекс» (патент РФ №2256894, G01M 3/00, 2003), который и выбран в качестве прототипа.
Комплекс содержит дистанционно-пилотируемый летательный аппарат (самолетного типа) с планером, силовой установкой с поршневым двигателем, системой автоматического управления с блоком управления бортовыми системами, а также системой автоматического дистанционного управления пролетом летательного аппарата и работой его систем. В систему автоматического управления входят инерциальная навигационная система, приемная аппаратура сигналов спутниковой радионавигационной системы, система воздушно-скоростных сигналов, радиовысотомер малых высот и вычислитель действительных координат. Система автоматического дистанционного управления полетом летательного аппарата и работой его систем включает приемную аппаратуру командного радиоуправления и обзорную телевизионную систему, радиоретрансляционную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему посадки и выпуска парашюта, систему управления двигателем, вычислитель системы автоматического управления, радиомаяк. В фюзеляже летательного аппарата размещена система диагностики состояния магистральных (протяженных) трубопроводов и блок управления системой диагностики. В составе комплекса предусмотрен мобильный наземный пункт управления, содержащий радиотелеметрическую систему, стартовую катапульту и пульт управления. Для обеспечения надежного обмена радиотелеметрической и командной информацией между дистанционно-пилотируемым летательным аппаратом и мобильным наземным пунктом управления радиотелеметрическая система выполнена в виде радиостанций (бортовой и наземной), использующих дуплексную радиосвязь на двух частотах и сложные сигналы с фазовой манипуляцией. Система диагностики состояния магистральных газопроводов содержит магнитометр, соединенный с пассивными магнитометрическими датчиками, тепловизор, лазерный газоанализатор, телевизионную систему, которые в свою очередь соединены с блоком управления системой диагностики.
Данный автоматический беспилотный диагностический комплекс при диагностике протяженных объектов имеет низкую эффективность из-за ограниченной прямой радиовидимости. Предельная дальность прямой радиовидимости на равной местности определяется известным соотношением
 ,
,
где R - предельная дальность прямой радиовидимости, км;
Н - высота полета летательного аппарата, м;
h - высота установки наземной приемопередающей антенны, м;
К - постоянный коэффициент (К=3,57 без учета, а К=4,12 с учетом атмосферной рефракции).
На пересеченной и в гористой местности дальность радиовидимость R дополнительно снижается высотой препятствий, расположенных на одной прямой между точками Н и h.
Прямая радиовидимость в первую очередь необходима при дистанционном управлении летательным аппаратом (ЛА) в режиме реального времени, особенно когда она меньше его полетной дальности. Прямая радиовидимость нужна и для обеспечения маловысотного полета ЛА, позволяющего упростить и удешевить его аппаратуру бортовой системы диагностики.
Для дистанционного управления летательным аппаратом за пределами прямой радиовидимости могут быть использованы следующие методы:
- постоянное перебазирование мобильного наземного пункта управления вдоль протяженного объекта на расстояние прямой радиовидимости (что не всегда возможно);
- установка на этих расстояниях дополнительных наземных пунктов управления, что снижает эффективность диагностики и удорожает ее;
- увеличение высоты полета ЛА, что приводит к увеличению прямой радиовидимости между ЛА и мобильным наземным пунктом управления, что также удорожает комплекс и снижает его эффективность;
- автопилотирование, когда программа полета закладывается в бортовой комплекс управления оператором на земле и в процессе полета ЛА движется по заранее запланированной траектории. Достоинством данного метода является простота реализации и низкие требования к уровню квалификации оператора. Недостатком является отсутствие адаптивности к изменяющимся условиям и задачам целевого применения, а также отсутствие возможности совершать управляемую посадку в незапланированной точке земной поверхности;
- радиоуправление, когда траектория полета ЛА задается по радиоканалу в режиме реального времени с пункта дистанционного управления оператором на земле. Данный метод лишен вышеперечисленных недостатков, не требует высокого уровня подготовки оператора.
Кроме того, при использовании метода радиоуправления на этапе планирования программы полета необходимо учитывать радиодоступность бортового приемного устройства передающему устройству системы наземного радиотелеуправления на всей траектории полета ЛА.
Практика применения автоматических беспилотных диагностических комплексов показывает, что вследствие некорректного планирования в ходе осуществления управляемого полета летательный аппарат может выходить за пределы зоны радиодоступа (покрытия), обслуживания передатчика пульта дистанционного управления и, как следствие, терять управляемость и падать в неизвестной точке местности. С учетом того, что стоимость автоматического беспилотного диагностического комплекса может составлять несколько сотен тысяч рублей, данный фактор нельзя не учитывать в ходе организации его применение.
Таким образом, для обеспечения эффективного и безопасного применения автоматизированного беспилотного диагностического комплекса до момента его старта оператор должен иметь возможность оценивать уровень радиосигнала на входе приемного устройства комплекса в любой заданной точке пространства в интересах корректного планирования траектории полета ЛА. Данное обстоятельство требует наличия программно-алгоритмического средства, позволяющего оперативно прогнозировать уровень сигнала на входе приемного устройства автоматического беспилотного диагностического комплекса с учетом его координат, высоты полета, рельефа местности и параметров местных предметов (прежде всего, растительности и застройки).
В настоящее время разработано достаточно большое число отечественных и зарубежных программно-аппаратных комплексов планирования связи, использующих возможности различных геоинформационных систем (ГИС) по доступу к цифровой информации о местности (ЦИМ). При этом данные комплексы в обязательном порядке применяют одну из реализованных в ГИС цифровых моделей рельефа (ЦМР) - матричную, триангуляционную и т.д.
В большинстве случаев выбор той или иной ЦМР и ее точности обусловлен требованиями к решению прикладных задач (Бугаевский Л.М., Цветков В.Я. Геоинформационные системы. Учебное пособие для ВУЗов - М., 2000, 223 с.).
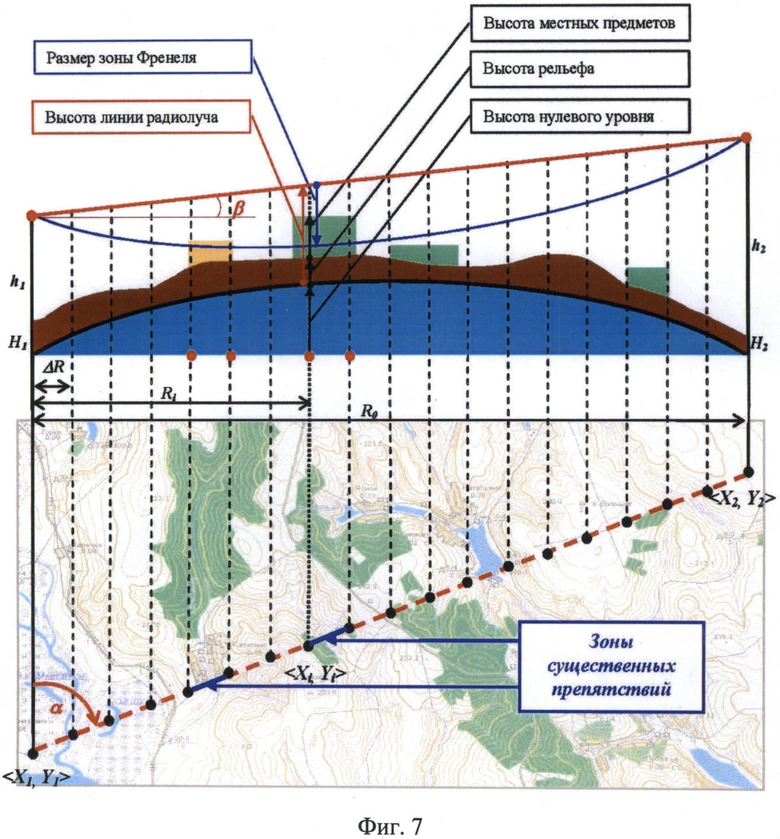
Однако во всех известных комплексах не обосновываются вопросы оптимизации расчета профилей трасс. Метод построения профиля трассы с формированием списка местных предметов остается единственным, позволяющим достигать требуемой точности и адекватности. При этом на основании заданных планово-высотных параметров точек установки антенны и высот подъема антенн (для первой антенны  и для второй антенны
и для второй антенны  с заданной дискретностью ∆R формируется массив точек профиля трассы (фиг.7), параметры которых позволяют оценить условия распространения радиоволн [Справочник по радиорелейной связи. Каменский Н.Н. и др. Под ред. С.В.Бородича. - М.: Радио и связь, 1981 - 416 с]:
с заданной дискретностью ∆R формируется массив точек профиля трассы (фиг.7), параметры которых позволяют оценить условия распространения радиоволн [Справочник по радиорелейной связи. Каменский Н.Н. и др. Под ред. С.В.Бородича. - М.: Радио и связь, 1981 - 416 с]:


где Ri - расстояние от левого конца трассы до i-й точки трассы;
 - плановые координаты i-й точки - на основании уравнения отрезка
- плановые координаты i-й точки - на основании уравнения отрезка  по известному азимуту трассы α;
по известному азимуту трассы α;
 - высота параболы, учитывающая кривизну Земли, в i-й точке трассы;
- высота параболы, учитывающая кривизну Земли, в i-й точке трассы;
 - высота поверхности рельефа в i-й точке трассы - по матрице высот электронной карты в точке с координатами
- высота поверхности рельефа в i-й точке трассы - по матрице высот электронной карты в точке с координатами 
 ;
;
 - высота относительная нижней границы минимальной существенной зоны Френеля в i-й точке трассы;
- высота относительная нижней границы минимальной существенной зоны Френеля в i-й точке трассы;
 - максимальная высота местных предметов (растительность, застройка) в i-й точке трассы - по семантическим характеристикам объектов электронной карты, попадающих в заданную окрестность i-й точки;
- максимальная высота местных предметов (растительность, застройка) в i-й точке трассы - по семантическим характеристикам объектов электронной карты, попадающих в заданную окрестность i-й точки;
 - высота относительная линии радиолуча в i-й точке трассы - на основании уравнения отрезка
- высота относительная линии радиолуча в i-й точке трассы - на основании уравнения отрезка  по известному углу места трассы β.
по известному углу места трассы β.
На основании величин  ,
,  и
и  определяется суммарная высота, которая сравнивается с высотами
определяется суммарная высота, которая сравнивается с высотами  и
и  для получения выводов о влиянии рельефа и местных предметов на распространение радиоволн в данной точке трассы.
для получения выводов о влиянии рельефа и местных предметов на распространение радиоволн в данной точке трассы.
Однако временные затраты на реализацию процедур запроса списка местных предметов возрастают на несколько порядков. Так, время расчета профиля одной трассы протяженностью около десяти километров с дискретностью порядка нескольких десятков метров занимает несколько секунд. Соответственно, время расчета всей трассы полета автоматического беспилотного диагностического комплекса общей протяженностью порядка нескольких десятков километров с дискретностью порядка сотни метров может составлять несколько десятков минут. Эта величина сопоставима с временем полета автоматического беспилотного диагностического комплекса по рассчитываемой трассе.
Таким образом, в полевых условиях до 30-40% рабочего времени могут занимать только расчеты трасс полета автоматического беспилотного диагностического комплекса, что вряд ли можно считать эффективным с точки зрения его целевого применения.
Технической задачей изобретения является повышение эффективности автоматического беспилотного диагностического комплекса путем обеспечения дистанционного управления ЛА за пределами прямой радиовидимости, а также снижения суммарных затрат на диагностику и передачу информации о результатах диагностики в режиме реального времени из любой точки протяженного объекта в мобильный наземный пункт управления.
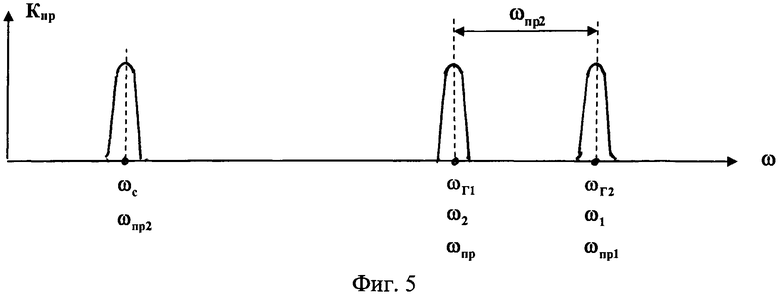
Поставленная задача решается тем, что автоматический беспилотный диагностический комплекс, содержащий, в соответствии с ближайшим аналогом, дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов, радиовысотомер малых высот и вычислитель действительных координат, подключенный к инерциальной навигационной системе и приемной аппаратуре спутниковой навигационной системе, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую систему командного радиоуправления и обзорную телевизионную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему обеспечения посадки с устройством торможения основных колес шасси, систему диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, при этом вычислитель действительных координат и первый вход-выход блока управления системой диагностики подключены к блоку управления бортовыми системами, второй вход-выход блока управления системой диагностики подключен к системе диагностики состояния газопровода, а третий вход-выход связан с системой командного радиоуправления, а также мобильный наземный пункт управления с устройствами связи контроля, при этом радиотелеметрическая система выполнена в виде двух радиостанций, размещенных на дистанционно-пилотируемом летательном аппарате и наземном пункте управления соответственно, первая из которых содержит последовательно включенные генератор высокой частоты, фазовый манипулятор, второй вход которого соединен с выходом источника дискретных сообщений и команд, первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, и усилитель второй промежуточной частоты, а также первый фазовый детектор, а вторая - содержит последовательно включенные генератор высокой частоты и фазовый манипулятор, второй вход которого соединен с выходом источника дискретных сообщений и команд, последовательно включенные первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, усилитель второй промежуточной частоты, перемножитель, второй вход которого соединен с выходом первого гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом второго гетеродина, а выход является выходом радиостанции, при этом частоты ωГ1 и ωГ2 гетеродинов разнесены на вторую промежуточную частоту
ωГ2-ωГ1=ωпр2
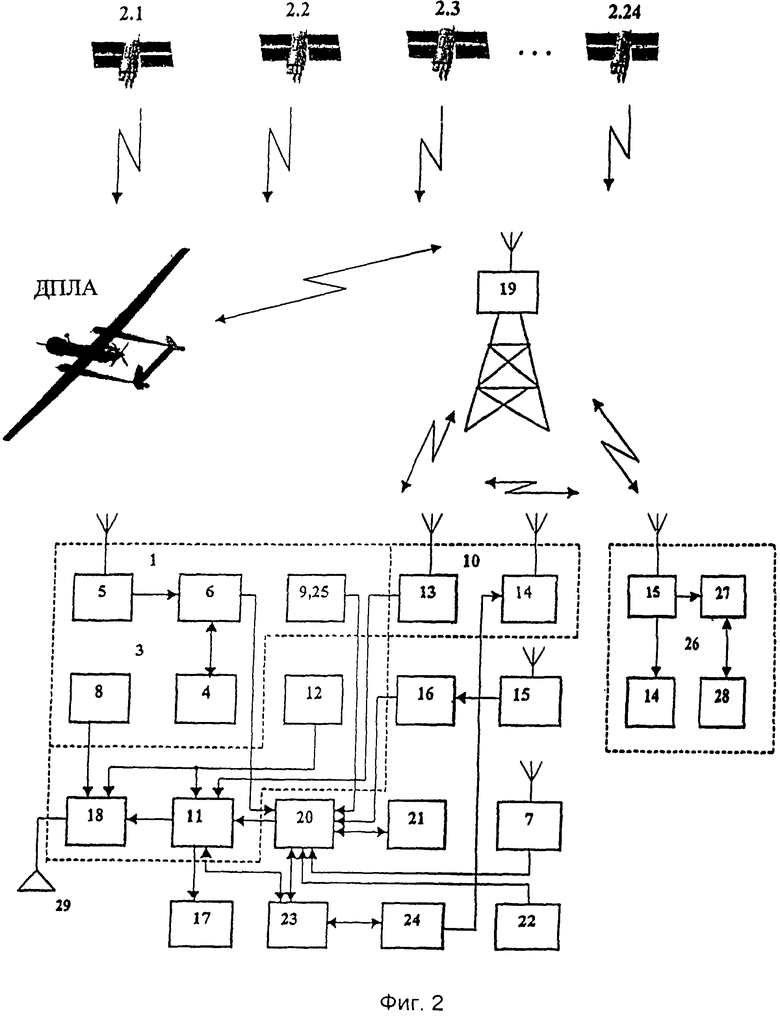
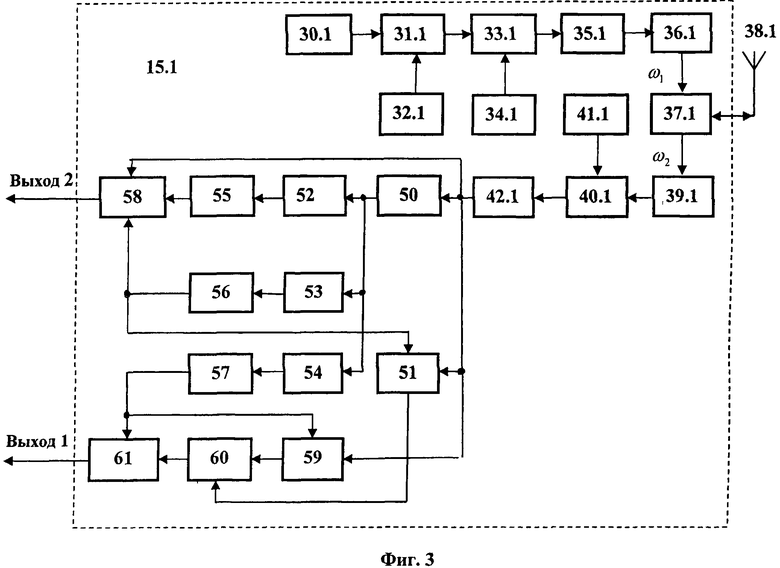
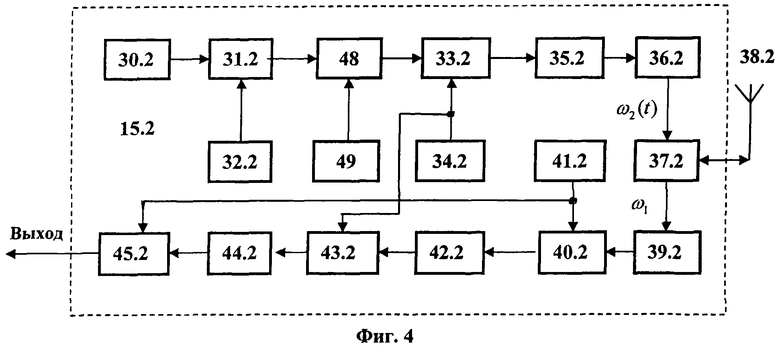
Радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, излучает сложные сигналы с фазовой манипуляцией на частоте ω1=ωпр1=ωГ2, а принимаемый - на частоте ω2=ωГ1, а радиостанция, размещенная на наземном пункте, наоборот, излучает сложные сигналы с фазовой манипуляцией на частоте ω2, а принимает на частоте ω1, отличается от ближайшего аналога тем, что он снабжен автономным ретранслятором, прикрепленным к оболочке шара, соединенной с газовым баллоном, с возможностью сброса ретранслятора с борта летательного аппарата, наполнения газом и обеспечения свободного полета шара, удерживающего ретранслятор, с помощью которого осуществляется дуплексная радиосвязь между летательным аппаратом и мобильным наземным пунктом управления, радиостанция, размещенная на мобильном наземном пункте управления, снабжена компьютером, в котором установлено программное обеспечение управления дистанционно-пилотируемым летательным аппаратом с помощью частотной манипуляции, причем к выходу фазового манипулятора подключен частотный манипулятор, второй вход которого соединен с выходом компьютера, а выход соединен с первым входом первого смесителя, радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, снабжена удвоителем фазы, тремя блоками фазовой автоподстройки частоты (ФАПЧ), тремя делителями фазы на два, частотным демодулятором, сумматором, вторым и третьим фазовыми детекторами, причем к выходу усилителя второй промежуточной частоты последовательно подключены удвоитель фазы, первый блок ФАПЧ, первый делитель фазы на два и частотный демодулятор, второй вход которого соединен с выходом усилителя второй промежуточной частоты, а выход является вторым выходом радиостанции, к выходу удвоителя фазы последовательно подключены второй блок ФАПЧ и второй делитель фазы на два, выход которого соединен с третьим входом частотного демодулятора, к выходу удвоителя фазы последовательно подключены третий блок ФАПЧ, третий делитель фазы на два, второй фазовый детектор, второй вход которого соединен с выходом усилителя второй промежуточной частоты, сумматор, второй вход которого через первый фазовый детектор соединен с выходами усилителя второй промежуточной частоты и второго делителя фазы на два, и третий фазовый детектор, второй вход которого соединен с выходом третьего делителя фазы на два, а выход является первым выходом радиостанции, радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, принимает сложные сигналы с комбинированной фазовой и частотной манипуляцией на частоте ω2, взаимное расположение дистанционно-пилотируемого аппарата (ДПЛА), ретранслятора 46, прикрепленного к оболочке шара 47, и мобильного наземного пункта управления 26 показана на фиг.1. Структурная схема автоматического беспилотного диагностического комплекса представлена на фиг.2. Структурная схема радиостанции 15.1, размещенной на борту ДПЛА, изображена на фиг.3. Структурная схема радиостанции 15.2, размещенной на наземном пункте 26 управления, изображена на фиг.4. Частотные диаграммы, иллюстрирующие процесс преобразования сигналов, показаны на фиг.5 и 6. Элементы дискретного профиля трассы ДПЛА показаны на фиг.7.
Автоматический беспилотный диагностический комплекс содержит систему 1 автоматического управления, спутники 2.i (i=1, 2, …,, 24) глобальной навигационной системы ГЛОНАСС или НАВСТАР, навигационную систему 3, инерциальную навигационную систему 4, приемную аппаратуру 6 спутниковой навигационной системы ГЛОНАСС или НАВСТАР, вычислитель 6 действительных координат спутниковой навигационной системы, радиомаяк 7, систему 8 воздушно-скоростных сигналов, малогабаритный радиовысотомер 9 малых высот, систему 10 автоматического дистанционного управления, систему 11 команд радиоуправления, информационно-логический блок 12, приемную аппаратуру 13 командного радиооборудования, обзорную телевизионную систему 14, систему 15 радиотелеметрии, систему 16 автоконтроля работы бортовых систем ДПЛА с вычислителем, систему 17 управления двигателем, вычислитель 18 системы автоматического управления, радиоретранслятор 19, блок 20 управления бортовыми системами, бортовой накопитель 21 информации, систему 22 посадки и выпуска парашюта, блок 23 управления системой диагностики состояния магистральных газопроводов, систему 24 диагностики состояния магистральных газопроводов, радиовысотомер 25, наземный пункт 26 управления, наземный пульт 27 управления, стартовую катапульту и систему 28 спасения, а также автономный ретранслятор 46, прикрепленный к оболочке шара 47, соединенный с газовым баллоном (не показан), с возможностью сброса ретранслятора с борта летательного аппарата, наполненным газом, и обеспечения свободного полета шара, удерживающего ретранслятор, с помощью которого осуществляется дуплексная радиосвязь между ДПЛА и наземным пунктом управления 26.
Радиотелеметрическая система 15 содержит две радиостанции 15.1 и 15.2, размещенные на ДПЛА и наземном пункте 26 управления соответственно.
Первая радиостанция 15.1 содержит последовательно включенные генератор 30.1 высокой частоты, фазовый манипулятор 31.1, второй вход которого соединен с выходом источника 32.1 дискретных сообщений и команд, первый смеситель 33.1, второй вход которого соединен с выходом первого гетеродина 34.1, усилитель 35.1 первой промежуточной частоты, первый усилитель 36.1 мощности, дуплексер 37.1, вход-выход которого связан с приемопередающей антенной 38.1, второй усилитель 39.1 мощности, второй смеситель 40.1, второй вход которого соединен с выходом второго гетеродина 41.1, усилитель 42.1 второй промежуточной частоты, удвоитель 50 фазы, первый блок 52 фазовой автоподстройки частоты (ФАПЧ), первый делитель 55 фазы на два и частотный демодулятор 58, второй вход которого соединен с выходом усилителя 42.1 второй промежуточной частоты, а выход является вторым выходом радиостанции 15.1. К выходу удвоителя 50 фазы последовательно подключены второй блок 53 ФАПЧ и второй делитель 56 фазы на два, выход которого соединен с третьим входом частотного демодулятора 58. К выходу удвоителя 50 фазы последовательно подключены третий блок 54 ФАПЧ, третий делитель 57 фазы на два, второй фазовый детектор 59, второй вход которого соединен с выходом усилителя 42.1 второй промежуточной частоты, сумматор 60, второй вход которого через первый фазовый детектор 51 соединен с выходом усилителя 42.1 второй промежуточной частоты и второго делителя 56 фазы на два, и третий фазовый детектор 61, второй вход которого соединен с выходом третьего делителя 57 фазы на два, а выход является первым выходом радиостанции 15.1.
Вторая радиостанция 15.2 содержит последовательно включенные генератор 30.2 высокой частоты, фазовый манипулятор 31.2, второй вход которого соединен с выходом источника 32.2 дискретных сообщений и команд, частотный манипулятор 48, второй вход которого соединен с выходом компьютера 49, первый смеситель 33.2, второй вход которого соединен с выходом первого гетеродина 34.2, усилитель 35.2 первой промежуточной частоты, первый усилитель 36.2 мощности, дуплексер 37.2, вход-выход которого связан с приемопередающей антенной 38.2, второй усилитель 39.2 мощности, второй смеситель 40.2, второй вход которого соединен с выходом второго гетеродина 41.2, усилитель 42.2 второй промежуточной частоты, перемножитель 43.2, второй вход которого соединен с выходом первого гетеродина 34.2, полосовой фильтр 44.2 и фазовый детектор 45.2, второй вход которого соединен с выходом второго гетеродина 41.2, а выход является выходом радиостанции 15.2.
Автоматический беспилотный диагностический комплекс содержит дистанционно-пилотируемый летательный аппарат, планер которого выполнен из дешевых композиционных материалов.
Аэродинамическая схема ДПЛА содержит моноплан с высокорасположенным крылом небольшой стреловидности, двухбалочным хвостовым оперением и расположенным в задней части фюзеляжа двухцилиндровым двухтактным поршневым двигателем с трехлопасным толкающим воздушным винтом фиксированного шага. В центроплане крыла размещаются мягкие топливные баки. В центральной части центроплана размещается посадочный парашют. Хвостовое оперение выполнено двухкилевым. Между килями располагается стабилизатор.
В передней части фюзеляжа расположен отсек полезной нагрузки. Двигатель выполнен поршневым с трехлопасным винтом фиксированного шага, подключенным к системе 17 управления двигателем.
ДПЛА имеет трехколесное шасси. Основные колеса имеют тормозные устройства, обеспечивающие одновременное и дифференциальное торможение, связанные с системой 22 посадки и выпуска парашюта, подключенной к блоку 20 управления бортовыми системами.
Бортовые системы ДПЛА содержат систему 1 автоматического управления, состоящую из двух систем.
Первая система - навигационная 3, в состав которой включены инерциальная навигационная система (ИНС), приемная аппаратура 5 спутниковой навигационной системы (СНС), связанной со спутниками 2.i (i=1, 2, …, 24), система 8 воздушно-скоростных сигналов, подключенная к вычислителю 18 САУ, малогабаритный высотомер 9 малых высот, подключенные к блоку 20 управления бортовыми системами.
Вторая система - система 10 автоматического дистанционного управления, в состав которой входит система 13 командного радиоуправления, обзорная телевизионная система 14. Система 17 управления двигателем подключена к системе 11 команд радиоуправления и блоку 20 управления бортовыми системами. Радиотелеметрическая система 15 соединена с системой 16 автоконтроля, подключенной к входу блока 20 управления бортовыми системами, входы вычислителя 18 САУ подключены к системе 8 воздушно-скоростных сигналов, информационно-логический блок 12 - к системе 11 команд радиоуправления, а выход вычислителя 18 связан с рулями направления 29. Блок 20 управления бортовыми системами связан с выходами радиовысотомера 25, бортового накопителя 21 информации, радиомаяка 7, выходами системы 22 посадки и выпуска парашюта подключенной к системе 11 команд радиоуправления, блок 23 управления системой диагностики, вычислителя 6 действительных координат, входы которого связаны с ИНС 4 и приемной аппаратурой 5 СНС. Система 24 диагностики состояния магистральных газопроводов подключена своими входами-выходами к блоку 23 управления системой диагностики.
Наземная часть содержит радиотелеметрическую систему 15, телевизионную систему 14, стартовую катапульту 28, связанную с наземным пультом 27 управления наземного пункта 26.
В блоке 23 управления системой диагностики встроены блок контроля функционального состояния диагностической системы, блок накопления диагностической информации, блок включения/отключения, блок включения обогрева диагностической аппаратуры, блок вычислений.
Система 24 диагностики состояния магистральных газопроводов содержит магнитометр, соединенный с пассивным магнитометрическими датчиками, тепловизор, лазерный газоанализатор, телевизионную систему и соединена с блоком 23 управления системой диагностики.
Выполнение полета и диагностика состояния газовых трубопроводов с помощью АБДК осуществляются следующим образом.
Автоматический беспилотный диагностический комплекс обеспечивает наилучшие условия выполнения мониторинга и измерения параметров состояния газовых трубопроводов с помощью бортовой аппаратуры. Навигационная система 3 в составе ИНС 4, приемной аппаратуры 5 СНС, системы 8 воздушно-скоростных сигналов, радиовысотомера 9 малых высот обеспечивает стабилизацию углового положения ДПЛА на всех режимах полета, управление полетом ДПЛА по заданному программой маршруту, выдачу потребителям текущих координат ДПЛА и другой навигационной информации.
Система 10 автоматического дистанционного управления в составе блока 11 команд радиоуправления и логического блока 12, приемной аппаратуры 13 командного радиоуправления, обзорной телевизионной системы 14 обеспечивает
- коррекцию или изменение маршрута полета ДПЛА;
- управление системами ДПЛА при выполнении автоматического взлета по-самолетному;
- управление системами ДПЛА при выполнении штатной, вынужденной или аварийной посадки по-самолетному;
- автоматическое пилотирование ДПЛА, прекращение выполнения задания и возврат на площадку посадки, в случае необходимости;
- обеспечивает безопасность полета ДПЛА и газопроводов в случае остановки двигателя, выхода из строя командной радиолинии управления.
В чрезвычайных обстоятельствах система переключает управление полетом ДПЛА на себя и работает автономно по записанной в БЦВМ 21 логике в соответствии с конкретными отказами.
Система обеспечения посадки ДПЛА включает парашютную систему, трехколесное шасси. Система обеспечивает выполнение посадки ДПЛА по-самолетному на подготовленную площадку.
Диагностирование выполняют с помощью установленных на ДПЛА газоанализатора, тепловизора, магнитометрической системы контроля катодной защиты трубопровода с помощью телевизионной системы. Тепловизор позволяет получать видимое изображение исследуемого трубопровода по его собственному тепловому (ИК) излучению, определяя формы и места положения слабонагретых и замаскированных трубопроводов в дневных и ночных условиях. Тепловые аномалии, создаваемые магистральными трубопроводами, связаны с транспортом нагретого газа и утечками из трубопровода.
Для работы системы диагностики обеспечивают ввод данных о точной высоте полета над трубой с помощью радиовысотомера, об угловых координатах положения планера, о текущих координатах местности, поступающих из НО в вычислитель блока управления системой диагностики состояния магистральных газопроводов и далее в блоки вычисления и накопления.
В процессе полета обзорная телевизионная система передает на наземный пункт управления обзор местности, передает изображение, текущие координаты полета, информацию о работе и отказах бортовых систем. Оператор наблюдает на видеокамере изображение трубы относительно ДПЛА по визуальной сетке. Изображением желаемой траектории полета является визирная сетка, перекрестие, направленное на цель, которую необходимо выдерживать. Объективы тепловизора, телевизионной системы автоматически закрываются с помощью шторок при взлете и посадке. Через командную радиолинию с земли оператор корректирует полет ДПЛА, осуществляет контроль функционального состояния диагностической системы, при необходимости ее обогрев и управление диагностической системой. В результате чего происходят измерения полей температурного контраста тепловизионной системой, затем измерение концентрации трансформируемого газа газоанализатором. Определение магнитного поля регистрируют в соответствии с линейным положением магнитометра по отношению к трубопроводу. При этом скорость сканирования тепловизионной и телевизионной систем устанавливается по сигналу, поступающему из блока 23 управления, определяемому по соотношению скорости полета к высоте. Полученные измерения диагностической системы и параметры траектории полета поступают в блок вычислителя и затем в блок накопления диагностической информации, встроенные в блок 23 управления диагностической системы.
В вычислителе 6 используется комплексная обработка информации (КОИ), результатом которой являются действительные значения параметров движения ЛА.
Повышение точности формирования действительных значений пилотажно-навигационных параметров достигается использованием оптимальной КОИ с реализацией фильтра Калмана.
В приемной аппаратуре 5 СНС измеряется псевдодальность по оценке задержки огибающей псевдослучайных последовательностей и радиальная псевдоскорость по оценке доплеровского смещения частоты несущей. В сигналы кодов закладывается соответствующий массив служебной информации, содержащей эфемериды, альманах, частотно-временные поправки, метки времени, сведения о работоспособности бортовой аппаратуры по результатам измерений. В приемной аппаратуре 5 СНС решается навигационно-временная задача.
Управление АБДК осуществляется с помощью системы 18 автоматического управления, обеспечивающей отработку и стабилизацию пространственной траектории, отслеживающей траекторию движения АБДК, и автомата управления тягой двигателей, выдерживающего заданную скорость.
Радиостанции 15.1 и 15.2 радиотелеметрической системы 15 работают следующим образом.
Генератором 30.1 высокой частоты формируют гармоническое колебание
uc1(t)=Uc1cos(ωct+φc1), 0≤t≤Tc1,
где  - амплитуда, несущая частота, начальная фаза и длительность колебания, которое поступает на первый вход фазового манипулятора 31.1, на второй вход которого подается модулирующий код M1(t) с выхода источника 32.1 дискретных сообщений и команд. В качестве источника 32.1 дискретных сообщений и команд могут быть текущие координаты ДПЛА, информация о работе и отказах бортовых систем и т.п. На выходе фазового манипулятора 31.1 образуется сложный сигнал с фазовой манипуляцией (ФМн)
- амплитуда, несущая частота, начальная фаза и длительность колебания, которое поступает на первый вход фазового манипулятора 31.1, на второй вход которого подается модулирующий код M1(t) с выхода источника 32.1 дискретных сообщений и команд. В качестве источника 32.1 дискретных сообщений и команд могут быть текущие координаты ДПЛА, информация о работе и отказах бортовых систем и т.п. На выходе фазового манипулятора 31.1 образуется сложный сигнал с фазовой манипуляцией (ФМн)
u1(t)=Uc1cos[ωct+φk1(t)], 0≤t≤Tc1,
где φk1(t)={0,π} - манипулированная составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем φk1(t)=const при kτэ<t<(k+l)τэ и может изменяться скачком при t=kτэ, т.е. на границах между элементарными посылками (n=1, 2, …, N1-1);
τэ,N1 - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc1(Tc1=τэN1),
который поступает на первый вход смесителя 33.1, на второй вход которого подается напряжение гетеродина 34.1
UГ1(t)=UГ1cos(ωГ1t+φГ1).
На выходе смесителя 33.1 образуются напряжения комбинационных частот. Усилителем 35.1 выделяется напряжение первой промежуточной (суммарной) частоты
uпр1(t)=Uпр1cos[ωпр1t+φk1(t)+φпр1], 0≤t≤Tc1,
где  ;
;
K1 - коэффициент передачи смесителя;
ωпр1=ωc+ωГ1 - первая промежуточная частота;
φпр1=φс1+φГ1.
Это напряжение после усиления в усилителе 36.1 мощности через дуплексер 37.1 излучается приемопередающей антенной 38.1 в эфир на частоте ω1=ωпр1, улавливается приемопередающей антенной 38.2 и через усилитель 39.2 мощности поступает на первый вход смесителя 40.2. На второй вход смесителя 40.2 подается напряжение uГ1(t) гетеродина 41.2.
На выходе смесителя 40.2 образуются напряжения комбинационных частот. Усилителем 42.2 выделяется напряжение второй промежуточной (разностной) частот:
uпр2(t)=Uпр2cos[ωпр2t+φk1(t)+φпр2], 0≤t≤Tc1,
где  ;
;
ωпр2=ωпр1-ωГ1 - вторая промежуточная (разностная) частота;
φпр2=φпр1+φГ1,
которое поступает на первый вход перемножителя 43.2. На второй вход перемножителя 43.2 подается напряжение гетеродина 34.2
uГ2(t)=UГ2cos(ωГ2t+φГ2).
На выходе перемножителя 43.2 образуется напряжение
u2(t)=U2cos[ωГ1t-φk1(t)+φГ1], 0≤t≤Tc1,
где  ;
;
К2 - коэффициент передачи перемножителя,
которое выделяется полосовым фильтром 44.2 и поступает на вход фазового детектора 45.2, на опорный вход которого подается напряжение uГ1(t) гетеродина 41.2. На выходе фазового детектора 45.2 образуется низкочастотное напряжение
uн1(t)=UH1cosφk1(t), 0≤t≤Tc1,
где  ;
;
пропорциональное модулирующему коду M1(t).
На наземном пункте 26 управления формируется с помощью генератора 30.2 высокой частоты гармоническое колебание
uC2=UC2cos(ωct+φC2), 0≤t≤TC2,
которое поступает на первый вход фазового манипулятора 31.2, на второй вход которого поступает модулирующий код М2(t) с выхода источника 32.2, дискретных сообщений и команд. В качестве источника дискретных сообщений могут быть сигналы запроса о работе различных бортовых систем, команды на включение или выключение блоков и т.д. На выходе фазового манипулятора 31.2 образуется сложный сигнал с фазовой манипуляцией
u3(t)=Uc2cos[ωct+φk2(t)+φc2], 0≤t≤Tc2,
который поступает на первый вход частотного манипулятора 48, на второй вход которого подается модулирующий код М3(1), отражающий зоны существенных препятствий, которые рассчитываются в компьютере 49 на основе априорных сведений о рельефе и местных предметах.
С точки зрения оценивания влияния рельефа и местных предметов на распространение сигнала УКВ-диапазона интерес представляют только те точки профиля (с учетом высоты местных предметов), в которых линия радиолуча (для закрытых трасс) или линия минимальной существенной зоны Френеля (для полуоткрытых трасс) пересекают профиль рельефа.
Таким образом, зная плановые и высотные координаты антенн передатчика и приемника, а также максимальную высоту местных предметов объектов в пределах заданного района  , можно сформулировать логическое условие, при выполнении которого необходимо осуществлять поиск местных предметов в заданной точке следа трассы:
, можно сформулировать логическое условие, при выполнении которого необходимо осуществлять поиск местных предметов в заданной точке следа трассы:

Физический смысл данного условия состоит в том, что нет необходимости искать местные предметы в точке, когда заранее известно, что их абсолютная высота не будет превышать высоту нижней границы минимальной существенной зоны Френеля. На фиг.7 точки, удовлетворяющие условию (3), обозначены красными маркерами. Из данного примера видно, что для типовых трасс объем таких точек не превышает 20-30% от общего числа точек профиля. Отрезки следа трассы, для точек которых справедливо условие (3), названы зонами существенных препятствий.
Если принять допущение о существенном поднятии антенны приемника бортового комплекса управления ДПЛА (фиг.7), то высоту подъема антенны передатчика пульта дистанционного управления h1 можно считать равной 2-5 метрам, а для известных типов ДПЛА высота полета h2 может колебаться в пределах 100-500 метров. Экспериментальные данные показывают, что для обозначенных выше геометрических параметров трасс полета ДПЛА зона потенциально возможного влияния рельефа располагается вблизи левого конца трассы (фиг.7) и может составлять от 10% (с большими углами визирования на ДПЛА) для коротких до 40% (с малыми углами визирования на ДПЛА) для длинных трасс общей протяженности трассы.
На выходе частотного манипулятора 48 образуется сложный сигнал с комбинированной фазовой и частотной манипуляцией (ФМн-ФМн)
u4(t)=Uc2cos[ωn(t)t+φk2(t)+φc2], 0≤t≤Tc,
где ωT(t)={ωI,ωII} - манипулируемая составляющая частоты, отображающая закон частотной манипуляции в соответствии с модулирующим кодом M3(t), при этом ωn(t)=const при nτэ<t<(n+1)τэ и может изменяться скачком ∆ω при t=nτэ, т.е. на границах между элементарными посылками.
Этот сигнал поступает на первый вход смесителя 33.2, на второй вход которого подается напряжение uГ2(t) гетеродина 34.2. На выходе смесителя 33.2 образуются напряжения комбинационных частот. Усилителем 35.2 выделяется напряжение промежуточной (разностной) частоты
uпр3(t)=Uпр3cos[ωпр(t)t-φk2(t)-φпр3], 0≤t≤Tc2,
где  ;
;
ωпр(t)=ωГ2-ωn(t)=ω2(t) - промежуточная частота;
φпр3=φГ2-φc2.
Это напряжение после усиления в усилителе 36.2 мощности через дуплексер 57.2 поступает в приемопередающую антенну 38.2, излучается ею в эфир на частоте ω2(t), улавливается приемопередающей антенной 38.1 и через усилитель 39.1 мощности поступает на первый вход смесителя 40.1, на второй вход которого подается напряжение uГ2(t) гетеродина 41.1. На выходе смесителя 40.1 образуются напряжения комбинационных частот. Усилителем 42.1 выделяется напряжение второй промежуточной (разностной) частоты
uпр4(t)=Uпр4cos[ωпр2(t)t+φk2(t)+φпр4], 0≤t≤Tc2,
где  ;
;
ωgh2(t)=ωГ2-ωпр(t) - вторая промежуточная (разностная) частота;
ωпр4=φ2-φпр3.
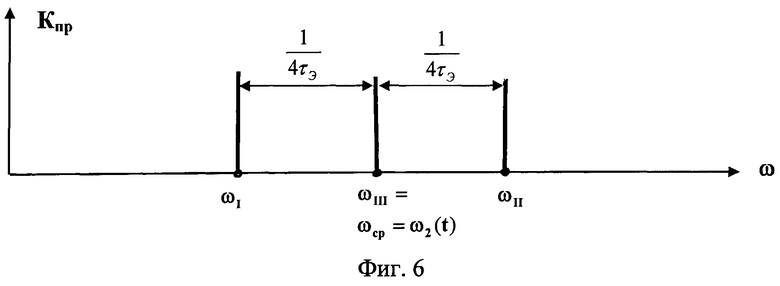
В спектре данного сигнала с непрерывной фазой и индексом частотной манипуляции
mf=(ωII-ωI)τэ=0,5
символьные частоты ωI и ωII подавлены. Указанные символьные частоты определяются следующим образом (фиг.6):
 - частота сигнала, соответствующая символу «+1»;
- частота сигнала, соответствующая символу «+1»;
 - частота сигнала, соответствующая символу «-1»;
- частота сигнала, соответствующая символу «-1»;
 - средняя (мнимая) частота сигнала.
- средняя (мнимая) частота сигнала.
Так как в спектре принимаемого сложного ФМн-ЧМн - сигнала символьные частоты ωI и ωII подавлены, то приемник радиостанции 15.1 осуществляет слежение за средней ("мнимой") частотой ωср=ω2(t).
Напряжение uпр4(t) с выхода усилителя 42.1 второй промежуточной частоты поступает на первый вход частотного модулятор 58 и на входы удвоителя 50 фазы, фазовых детекторов 51 и 59.
При удвоении фазы принимаемый сложный сигнал приобретает индекс частотной модуляции mf=1 и его сплошной спектр трансформируется в три дискретные составляющие 2ωI, 2ωII и 2ωIII. С помощью блоков ФАПЧ 52, 53 и 54 осуществляется фильтрация дискретных составляющих, а делители 55, 56 и 57 обеспечивают соответствие частот сигналов синхронизации и принимаемого сложного ФМн-ЧМн-сигнала.
На выходе делителей 55, 56 и 57 фазы на два образуются гармонические колебания:
uI(t)=UIcosωIt,
uII(t)=UIIcosωIIt,
uIII(t)=UIIIcosωIIIt,
которые поступают на соответствующие входы частотного демодулятора 58 и фазовых детекторов 51, 59 и 61.
С выхода частотного демодулятора 58, который является вторым выходом радиостанции 15.1, двоичная последовательность М3(1), переданная с помощью частотной манипуляции, поступает в систему 10 автоматического дистанционного управления, реализуя программное обеспечение, заложенное в компьютере 49 на мобильном наземном пункте управления.
На выходах фазовых детекторов 51 и 59 образуются следующие низкочастотные напряжения соответственно:
u5(t)=U4cos[(ωIII-ωI)t+φk2(t)],
u6(t)=U5cos[(ωII-ωIII)t+φk2(t)],
где  ;
;
К3 - коэффициент передачи фазовых детекторов,
которые суммируются в сумматоре 60

где  .
.
Это напряжение поступает на первый (информационный) вход фазового детектора 61, на второй (опорный) вход которого подается гармоническое колебание u3(t) с выхода делителя 57 фазы на два. На выходе фазового детектора 61 образуется низкочастотное напряжение
uн2(t)=UH2cosφk2(t), 0 ≤t≤Tc2,
где  ;
;

пропорциональное модулирующему коду M2(t).
Описанная выше работа автоматического беспилотного диагностического комплекса соответствует случаю, когда ДПЛА находится в положении I, т.е. ДПЛА и наземный пункт управления находятся в зоне прямой видимости (фиг.1).
На границе зоны прямой видимости в расчетной точке полета с борта ДПЛА сбрасывается оболочка шара с прикрепленным к ней контейнером 46, содержащим ретранслятор, а также баллон с газом, соединенным шлангом с оболочкой шара. На безопасном расстоянии от ДПЛА оболочка автоматически надувается газом. После наполнения оболочки баллон автоматически отстыковывается от ретранслятора. В свободном полете шар 47 удерживает ретранслятор 46 на высоте его сброса или выше, так как в процессе полета шар 47 может только подниматься.
Ретранслятор работает в автоматическом режиме, обеспечивая ретрансляцию радиосигналов, передаваемых с наземного пункта 26 управления на борт ДПЛА и в обратном направлении (положение II, фиг.1).
Электропитание оборудования ретранслятора 46 производится от аккумулятора, имеющегося в составе ретранслятора.
После выполнения своей функции шар 47 уничтожается с целью обеспечения безопасности полетов других летательных аппаратов в этом районе. Уничтожение шара осуществляется по команде с наземного пункта 26 управления или автоматически с помощью команды, сформированной в ретрансляторе 46 с помощью реле времени.
При этом частоты ωГ1 и ωГ2 гетеродинов 34.1(34.2) и 41.1(41.2) разнесены на величину второй промежуточной частоты ωГ2-ωГ1=ωпр2.
Радиостанция 15.1, размещенная на ДПЛА, излучает сложные сигналы с фазовой манипуляцией на частоте ω1=ωпр1=ωГ2, а принимает на частоте ω2(t)=ωГ1. Радиостанция 15.2, размещенная на наземном пункте 26 управления, наоборот, излучает сложные сигналы с комбинированной фазовой манипуляцией и частотной манипуляцией на частоте ω2(t), а принимает - на частоте ω1.
Автоматический беспилотный диагностический комплекс позволяет получать визуальную информацию о состоянии магистральных газопроводов в сложных метеоусловиях, в любое время суток при полете ДПЛА на высоте 50 м со скоростью 120…140 км/час над газопроводом в равнинной местности по координатам с использованием СНС, что уменьшает ошибки, не превышающие по боковому отклонению ±10 м и по высоте ±20 м.
В каждом полете ДПЛА диагностируется до 450 км газопровода. Обнаружение мест утечек газа обеспечивается диагностической системой при расходе газа 20…50 м3/сутки, выявляются разрушения покрытий в трубе площадью от 1 м и более. Полеты совершают в оба направления магистрали на удаление до 225 км (до следующей через одну станцию газоперекачки) с возвратом на площадку старта.
Таким образом, предлагаемый автоматический беспилотный диагностический комплекс по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение эффективности дистанционного контроля (мониторинга) состояния локальных, региональных и магистральных нефте- и газопроводов, высоковольтных ЛЭП, особо важных объектов, государственной границы в горной местности и других протяженных объектов за пределами прямой видимости, а также снижение суммарных затрат на диагностику и передачу информации о результатах диагностики в режиме реального времени из любой точки протяженного объекта в мобильный наземный пункт управления. Это достигается использованием ретранслятора. снабженного воздушным шаром, совместной радиотелеметрической системой и системой управления в виде радиостанций, расположенных на дистанционно пилотируемом летательном аппарате и мобильном наземном пункте управления соответственно, между которыми непосредственно и через ретранслятор устанавливается дуплексная радиосвязь на двух частотах с использованием сложных сигналов с фазовой манипуляцией и с комбинированной фазовой и частотной манипуляцией.
Кроме того, при использовании предлагаемого методического подхода средняя экономия временных затрат на планирование трассы полета ДПЛА в полевых условиях будет составлять порядка 70% по сравнению с расчетами по полной схеме. Указанное обстоятельство позволяет на 20-30% повысить эффективность целевого применения ДПЛА за счет покрытия в рамках отведенного времени большей суммарной протяженности трасс.
Сложные ФМн-сигналы и ФМн-ЧМн-сигналы обладают высокой помехоустойчивостью, энергетической и структурной скрытностью.
Энергетическая скрытность данных сигналов обусловлена их высокой сжимаемостью во времени и по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого сложные ФМн-сигнал и ФМн-ЧМн-сигнал в точке приема могут оказаться замаскированными шумами и помехами. Причем энергия сложного ФМн-сигнала и ФМн-ЧМн-сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов и помех.
Структурная скрытность сложных ФМн-сигналов и ФМн-ЧМн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменений параметров, что затрудняет оптимальную или хотя бы / квазиоптимальную обработку сложных ФМн-сигналов и ФМн-ЧМн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемников.
Сложные ФМн-сигналы и ФМн-ЧМн-сигналы позволяют применять новый вид селекции - структурную селекцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2424539C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2012 |
|
RU2503038C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2362981C2 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2464592C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2714845C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| СИСТЕМА СВЯЗИ НАЗЕМНОГО ПУНКТА УПРАВЛЕНИЯ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2024 |
|
RU2825035C1 |
Изобретение относится к области приборостроения и может быть использовано для дистанционного контроля состояния магистральных газопроводов и хранилищ с помощью диагностической аппаратуры, установленной на носитель - дистанционно-пилотируемый летательный аппарат (ДПЛА). Комплекс содержит ДПЛА с системой управления, включающей инерциальную и спутниковую навигационные системы, радиомаяк, систему воздушно-скоростных сигналов, радиовысотомеры, систему автоматического дистанционного управления, обзорную телевизионную систему, систему радиотелеметрии, систему автоконтроля работы бортовых систем ДПЛА, радиоретранслятор, бортовой накопитель информации, систему диагностики состояния магистральных газопроводов, наземный пункт управления с пультом управления, стартовую катапульту и систему спасения, автономный ретранслятор, прикрепленный к воздушному шару. Радиотелеметрическая система содержит две радиостанции, размещенные на ДПЛА и наземном мобильном пункте управления соответственно, обеспечивающие дуплексную радиосвязь между ДПЛА и наземным мобильным пунктом управления. Технический результат заключается в повышении эффективности дистанционного контроля. 7 ил.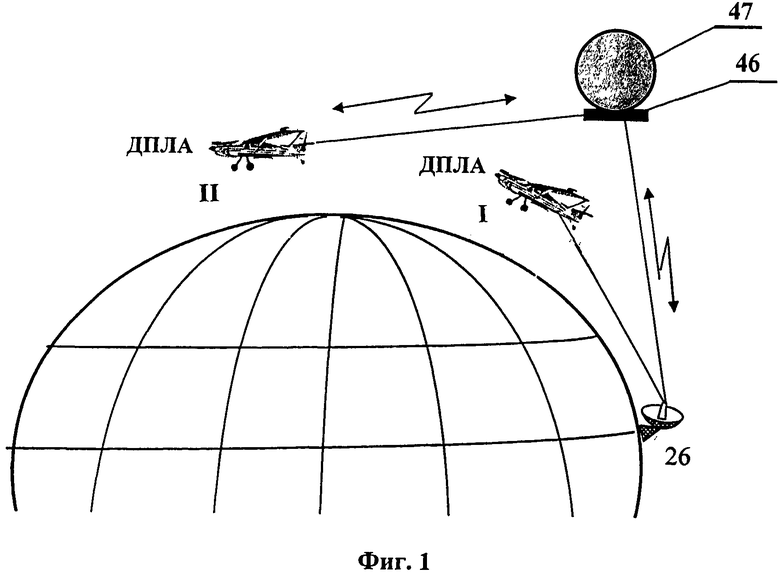
Автоматический беспилотный диагностический комплекс, содержащий дистанционно-пилотируемый летательный аппарат, включающий планер, силовую установку с поршневым двигателем, систему автоматического управления с блоком управления бортовыми системами, содержащую инерциальную навигационную систему, приемную аппаратуру спутниковой навигационной системы, систему воздушно-скоростных сигналов, радиовысотомер малых высот и вычислитель действительных координат, систему автоматического дистанционного управления полетом летательного аппарата и работой его систем, включающую приемную аппаратуру командного радиоуправления и обзорную телевизионную систему, радиоретрансляционную систему, систему автоконтроля работы бортовых систем, радиотелеметрическую систему, систему посадки и выпуска парашюта, систему управления двигателем, вычислитель системы автоматического управления, радиомаяк, систему диагностики состояния магистральных трубопроводов и блок управления системой диагностики, размещенные в фюзеляже летательного аппарата, а также мобильный наземный пункт управления, содержащий радиотелеметрическую систему, телевизионную систему, стартовую катапульту и пульт управления, при этом радиотелеметрическая система выполнена в виде двух радиостанций, размещенных на дистанционно-пилотируемом летательном аппарате и наземном пункте управления соответственно, первая из которых содержит последовательно включенные генератор высокой частоты, фазовый манипулятор, второй вход которого соединен с выходом источника дискретных сообщений и команд, первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, и усилитель второй промежуточной частоты, а также первый фазовый детектор, а второй содержит последовательно включенные генератор высокой частоты и фазовый манипулятор, второй вход которого соединен с выходом источника дискретных сообщений и команд, последовательно включенные первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, дуплексер, вход-выход которого связан с приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, усилитель второй промежуточной частоты, перемножитель, второй вход которого соединен с выходом первого гетеродина, полосовой фильтр и фазовый детектор, второй вход которого соединен с выходом второго гетеродина, а выход является выходом радиостанции, при этом частоты ωГ1 и ωГ2 гетеродинов разнесены на вторую промежуточную частоту ωГ2-ωГ1=ωпр2, радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, излучает сложный сигнал с фазовой манипуляцией на частоте ω1=ωпр1=ωГ2, a радиостанция, размещенная на наземном пункте управления принимает на этой частоте, отличающийся тем, что он снабжен автономным ретранслятором, прикрепленным к оболочке шара, соединенной с газовым баллоном, с возможностью сброса ретранслятора с борта летательного аппарата, наполнения газом и обеспечения свободного полета шара, удерживающего ретранслятор, с помощью которого осуществляется дуплексная радиосвязь между летательным аппаратом и мобильным наземным пунктом управления, радиостанция, размещенная на мобильном наземном пункте управления, снабжена компьютером, в котором установлено программное обеспечение управлением дистанционно-пилотируемым летательным аппаратом с помощью частотной модуляции, причем к выходу фазового манипулятора подключен частотный манипулятор, второй вход которого соединен с выходом компьютера, а выход соединен с первым входом первого смесителя, радиостанция, размещенная на мобильном наземном пункте управления, излучает сложные сигналы с комбинированной фазовой и частотной манипуляцией на частоте ω2(t), радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, снабжена удвоителем фазы, тремя блоками автоподстройки частоты (ФАПЧ), тремя делителями фазы на два, частотным демодулятором, сумматором, вторым и третьим фазовыми детекторами, причем к выходу усилителя второй промежуточной частоты последовательно подключены удвоитель фазы, первый блок ФАПЧ, первый делитель фазы на два и частотный демодулятор, второй вход которого соединен с выходом усилителя второй промежуточной частоты, а выход является вторым выходом радиостанции, к выходу удвоителя фазы последовательно подключены второй блок ФАПЧ и второй делитель фазы на два, выход которого соединен с третьим входом частотного демодулятора, к выходу удвоителя фазы последовательно подключены третий блок ФАПЧ, третий делитель фазы на два, второй фазовый детектор, второй вход которого соединен с выходом усилителя второй промежуточной частоты, сумматор, второй вход которого через первый фазовый детектор соединен с выходами усилителя второй промежуточной частоты и второго делителя фазы на два, и третий фазовый детектор, второй вход которого соединен с выходом третьего делителя фазы на два, а выход является первым выходом радиостанции, радиостанция, размещенная на дистанционно-пилотируемом летательном аппарате, принимает сложные сигналы с комбинированной фазовой и частотной манипуляцией на частоте ω2(t).
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2256894C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2362981C2 |
| Устройство для перемещения пульверизатора, применяемого в производстве триплекса | 1935 |
|
SU52053A1 |
| US 6766226 B2, 20.07.2004. | |||

