Область техники, к которой относится изобретение
Изобретение относится к области пневмомашиностроения, в частности к механизмам, предназначенным для осуществления перестановки, следящего и программного управления регулирующих органов, запорной и регулирующей арматуры газонефтепродуктопроводов при дистанционном и местном управлении.
Предшествующий уровень техники
Известен пневмогидравлический привод с поршневым двигателем, содержащим пневмоцилиндры, поршни, поворотный механизм, конечные выключатели (см., например, А. Ф. Гуревич и др. Справочник по арматуре для газо- и нефтепроводов, Ленинград: Недра, 1988, стр.346).
Техническими недостатками этого привода являются: наличие подвижных трущихся уплотнений, снижающих надежность и ресурс привода; большой объем полостей, заполняемых сжатым газом, приводящий к наличию ударных воздействий на объект управления, возможность произвольного перемещения выходного вала привода под действием внешней нагрузки.
Известен пневмогидравлический привод с поршневым двигателем, содержащий пневмогидроцилиндр, поршни, кулисный поворотный механизм, конечные выключатели (см. , например, А.Ф. Гуревич и др. Справочник по арматуре для газо- и нефтепроводов, Ленинград: Недра, 1988, стр.348).
Техническими недостатками этого привода являются: наличие второго рабочего тела - масла или специальной жидкости, что усложняет и удорожает эксплуатацию привода; наличие подвижных трущихся уплотнений; возможность произвольного перемещения под действием внешней нагрузки.
Известен пневматический привод со струйным двигателем, содержащий электропневматическое управляющее устройство, пневматический струйный двигатель, редуктор, ручной дублер, кулисно-винтовой поворотный механизм, устройство ограничения минимальной величины передаваемого момента.
Кулисно-винтовой поворотный механизм содержит корпус, фланец, кулисно-винтовую передачу, включающую в себя кулису с пазами, жестко закрепленную на выходном валу привода, установленный в корпусе ходовой винт, имеющий возможность продольного перемещения, последовательно и соосно соединенный с устройством поглощения кинетической энергии подвижных частей привода, выполненного в виде последовательного набора пакетов тарельчатых пружин, ходовую гайку, подвижно соединенную с ходовым винтом и установленную в поводке, при этом поводок имеет с двух сторон соосные цапфы с размещенными на них ползунами, по два на каждой цапфе.
Корпус поворотного механизма при этом выполнен из двух частей: собственно корпуса и крышки, при этом в каждой из этих частей выполнен направляющий паз, причем пазы параллельны друг другу, при этом крайние ползуны поводка входят подвижно, соответственно, в один и другой паз, а средние ползуны, соответственно, в один и другой паз кулисы (Патент на изобретение 2131065 от 27.05.1999.)
Техническими недостатками данной конструкции являются: ее сложность, большие габариты, обусловленные наличием двух направляющий пазов в разных деталях корпуса, четырех ползунов, большими длинами цапф.
Другим недостатком данной конструкции является также наличие устройства ограничения максимальной величины передаваемого момента, что существенно усложняет конструкцию привода, снижает его надежность и усложняет эксплуатацию.
Раскрытие сущности изобретения
Технической задачей изобретения является создание пневматического привода для запорно-регулирующей арматуры газонефтепродуктопроводов, имеющего уменьшенные габариты, расширенный диапазон применения для различных типоразмеров арматуры, повышенную надежность, упрощенную конструкцию.
Эта техническая задача решается за счет того, что ходовой винт и устройство поглощения кинетической энергии подвижных частей привода соединены между собой рычажной передачей, при этом устройство поглощения кинетической энергии подвижных частей привода размещено в корпусе поворотного механизма параллельно ходовому винту.
Эта техническая задача решается также за счет того, что в рычажной передаче один конец рычага подвижно закреплен с помощью кронштейна на корпусе кулисно-винтового механизма, а второй конец соединен подвижно со штоком устройства поглощения кинетической энергии подвижных частей привода, при этом промежуточная точка рычага соединена подвижно с ходовым винтом.
Эта техническая задача решается также за счет того, что в рычажной передаче предусмотрена возможность изменения передачи путем изменения передаточного числа рычажной передачи путем изменения плеч рычага за счет изменения взаимного расположения кронштейна, ходового винта и устройства поглощения кинетической энергии подвижных частей привода.
Эта техническая задача решается также за счет того, что подвижное соединение рычага и штока устройства поглощения кинетической энергии подвижных частей привода выполнено с помощью фигурного болта, установленного в прямоугольных пазах рычага и в цилиндрическом отверстии штока устройства поглощения кинетической энергии подвижных частей привода.
Эта техническая задача решается также за счет того, что устройство поглощения кинетической энергии подвижных частей привода, выполненного в виде набора тарельчатых пружин и двух втулок, собранных на штоке, установленном в корпусе поворотного механизма, параллельно оси ходового винта с возможностью ограниченного осевого перемещения, снабженного двумя кольцевыми упорами и соединенного подвижно с помощью фигурного болта с одним концом рычага рычажной передачи.
Эта техническая задача решается также за счет того, что рычаг соединен с ходовым винтом с помощью двухстороннего упорного подшипника, при этом подшипник размещен в корпусе, подвижно соединенном с рычагом, причем среднее кольцо подшипника жестко закреплено на ходовом винте, при этом корпус имеет с двух сторон цапфы с ползунами, которые размещаются подвижно в двух пазах, выполненных в теле рычага.
Эта техническая задача решается также за счет того, что корпус поворотного механизма выполнен в виде центрального тела, соединенного с днищем и крышкой, при этом в корпусе выполнен сквозной направляющий паз с параллельными стенками, в котором размещен поводок с прямоугольным поперечным сечением и внутренней цилиндрической полостью с боковыми углублениями, в которой размещена ходовая гайка с самотормозящейся резьбой, снабженная боковыми выступами, входящими в углубления поводка, причем ходовая гайка размещена в поводке с люфтами в поперечном направлении; при этом гайка соединена резьбой с ходовым винтом, причем поводок имеет с двух сторон укороченные цапфы с одним ползуном на каждой, которые размещаются подвижно соответственно в пазах кулисы.
Эта техническая задача решается также за счет того, что фланец выполнен в виде двух частей, одна из которых жестко связана с корпусом поворотного механизма, а вторая является сменной и соединяется с первой болтами.
Эта техническая задача решается также за счет того, что редуктор привода выполнен с возможностью изменения передаточного числа за счет установки двух сменных блоков шестерен.
Сущность изобретения заключается в том, что в пневматическом приводе, содержащем последовательно соединенные электропневматическое управляющее устройство, включающее в себя конечные выключатели, электропневмоклапаны, регуляторы расхода газа, реверсивный струйный двигатель, вал которого через механический редуктор, содержащий ручной дублер, и через кулисно-винтовой поворотный механзм, содержащий корпус, устновочный фланец, ходовой винт, ходовую гайку, поводок, кулису, устройство поглощения кинетической энергии привода, связан с выходным валом привода, ходовой винт и устройство поглощения кинетической энергии подвижных частей привода соединены между собой рычажной передачей, при этом устройство поглощения кинетической энергии подвижных частей привода размещено в корпусе поворотного механизма параллельно ходовому винту.
Сущность изобретения заключается также в том, что в рычажной передаче один конец рычага подвижно закреплен с помощью кронштейна на корпусе кулисно-винтового механизма, а второй конец соединен подвижно со штоком устройства поглощения кинетической энергии подвижных частей привода, при этом промежуточная точка рычага соединена подвижно с ходовым винтом.
Сущность изобретения заключается также в том, что в рычажной передаче предусмотрена возможность изменения передачи путем изменения передаточного числа рычажной передачи путем изменения плеч рычага за счет изменения взаимного расположения кронштейна, ходового винта и устройства поглощения кинетической энергии подвижных частей привода.
Сущность изобретения заключается также в том, что подвижное соединение рычага и штока устройства поглощения кинетической энергии подвижных частей привода выполнено с помощью фигурного болта, установленного в прямоугольных пазах рычага и в цилиндрическом отверстии штока устройства поглощения кинетической энергии подвижных частей привода.
Сущность изобретения заключается также в том, что устройство поглощения кинетической энергии подвижных частей привода выполнено в виде набора тарельчатых пружин и двух втулок, собранных на штоке, установленном в корпусе поворотного механизма, параллельно оси ходового винта с возможностью ограниченного осевого перемещения, снабженного двумя кольцевыми упорами и соединенного подвижно с помощью фигурного болта с одним концом рычага рычажной передачи.
Сущность изобретения заключается также в том, что рычаг соединен с ходовым винтом с помощью двухстороннего упорного подшипника, при этом подшипник размещен в корпусе, подвижно соединенном с рычагом, причем среднее кольцо подшипника жестко закреплено на ходовом винте, при этом корпус имеет с двух сторон цапфы с ползунами, которые размещаются подвижно в двух пазах, выполненных в теле рычага.
Сущность изобретения заключается также в том, что корпус поворотного механизма выполнен в виде центрального тела, соединенного с днищем и крышкой, при этом в корпусе выполнен сквозной направляющий паз с параллельными стенками, в котором размещен поводок с прямоугольным поперечным сечением и внутренней цилиндрической полостью с боковыми углублениями, в которой размещена ходовая гайка с самотормозящейся резьбой, снабженная боковыми выступами, входящими в углубления поводка, причем ходовая гайка размещена в поводке с люфтами в поперечном направлении; при этом гайка соединена резьбой с ходовым винтом, причем поводок имеет с двух сторон укороченные цапфы с одним ползуном на каждой, которые размещаются подвижно соответственно в пазах кулисы.
Сущность изобретения заключается также в том, что фланец выполнен в виде двух частей, одна из которых жестко связана с корпусом поворотного механизма, а вторая является сменной и соединяется с первой болтами.
Сущность изобретения заключается также в том, что редуктор привода выполнен с возможностью изменения передаточного числа за счет установки двух сменных блоков шестерен.
Причинно-следственная связь между достигаемым научно-техническим результатом и совокупностью признаков
Уменьшение габаритов и расширение диапазона применения приводов для различных типоразмеров арматуры достигается:
1. За счет того, что ходовой винт и устройство поглощения кинетической энергии подвижных частей привода соединены между собой рычажной передачей, при этом устройство поглощения кинетической энергии подвижных частей привода размещено в корпусе поворотного механизма параллельно ходовому винту.
Это позволяет существенно уменьшить габариты привода по длине.
2. За счет того, что в рычажной передаче один конец рычага подвижно закреплен с помощью кронштейна на корпусе кулисно-винтового механизма, а второй конец соединен подвижно со штоком устройства поглощения кинетической энергии подвижных частей привода, при этом промежуточная точка рычага соединена подвижно с ходовым винтом.
3. За счет того, что в рычажной передаче предусмотрена возможность изменения передачи путем изменения передаточного числа рычажной передачи путем изменения плеч рычага за счет изменения взаимного расположения кронштейна, ходового винта и устройства поглощения кинетической энергии подвижных частей привода.
4. За счет того, что подвижное соединение рычага и штока устройства поглощения кинетической энергии подвижных частей привода выполнено с помощью фигурного болта, установленного в прямоугольных пазах рычага и в цилиндрическом отверстии штока устройства поглощения кинетической энергии подвижных частей привода.
5. За счет того, что устройство поглощения кинетической энергии подвижных частей привода выполнено в виде набора тарельчатых пружин и двух втулок, собранных на штоке, установленном в корпусе поворотного механизма, параллельно оси ходового винта с возможностью ограниченного осевого перемещения, снабженного двумя кольцевыми упорами и соединенного подвижно с помощью фигурного болта с одним концом рычага рычажной передачи.
Совокупность признаков по пп.2, 3, 4, 5 позволяет осуществлять варьирование и регулирование в широком диапазоне силы, передаваемой на устройство поглощения кинетической энергии подвижных частей привода со стороны ходового винта, и устанавливать требуемый набор тарельчатых пружин при использовании привода для различных типоразмеров арматуры.
Расширение диапазона применения приводов для различных типоразмеров арматуры достигается:
6. За счет того, что фланец выполнен в виде двух частей, одна из которых жестко связана с корпусом поворотного механизма, а вторая является сменной и соединяется с первой болтами.
Это позволяет устанавливать один и тот же привод на различные типы и типоразмеры арматуры.
7. За счет того, что редуктор привода выполнен с возможностью изменения передаточного числа за счет установки двух сменных блоков шестерен.
Это позволяет изменить величину движущего момента привода при установке его на различные типы и типоразмеры арматуры.
Повышение надежности и упрощение конструкции привода достигается:
1. За счет того, что устройство поглощения кинетической энергии подвижных частей привода выполнено в виде набора тарельчатых пружин и двух втулок, собранных на штоке, установленном в корпусе поворотного механизма, параллельно оси ходового винта с возможностью ограниченного осевого перемещения, снабженного двумя кольцевыми упорами и соединенного подвижно с помощью фигурного болта с одним концом рычага рычажной передачи.
Это позволяет обеспечить условия, при которых при любом режиме работы привода максимально возможный момент на выходном валу привода не превысит расчетной допустимой величины, что позволяет исключить из привода устройство ограничения максимального передаваемого момента, что существенно упрощает конструкцию и повышает надежность привода.
2. За счет того, что корпус поворотного механизма выполнен в виде центрального тела, соединенного с днищем и крышкой, при этом в корпусе выполнен сквозной направляющий паз с параллельными стенками, в котором размещен поводок с прямоугольным поперечным сечением и внутренней цилиндрической полостью с боковыми углублениями, в которой размещена ходовая гайка с самотормозящейся резьбой, снабженная боковыми выступами, входящими в углубления поводка, причем ходовая гайка размещена в поводке с люфтами в поперечном направлении; при этом гайка соединена резьбой с ходовым винтом, причем поводок имеет с двух сторон укороченные цапфы с одним ползуном на каждой, которые размещаются подвижно соответственно в пазах кулисы.
Это позволяет повысить надежность работы поводка и ходовой гайки, установка которой в полости поводка с боковыми люфтами позволяет избежать заклинивания гайки за счет технологической непараллельности оси ходового винта и направляющего паза.
Изобретение поясняется далее описанием примера осуществления со ссылкой на чертежи, где
На фиг.1 изображена схема пневматического привода.
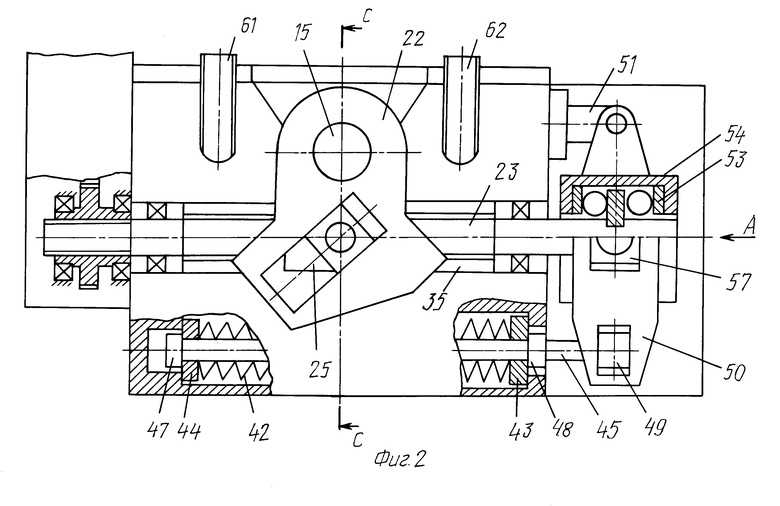
На фиг.2 изображен вид сверху кулисно-винтового поворотного механизма.
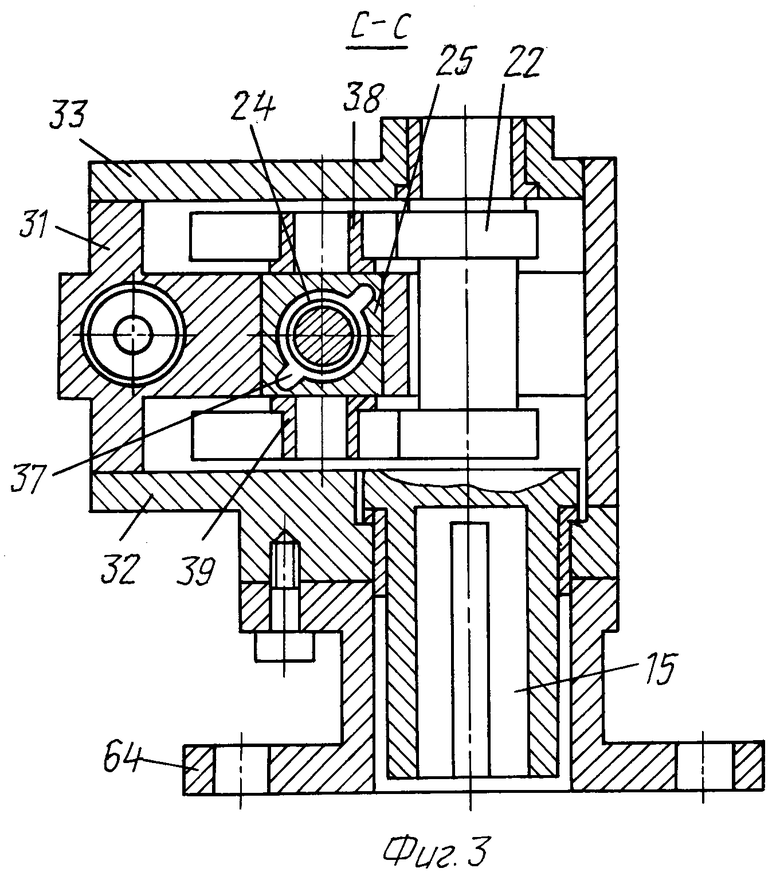
На фиг.3 изображен разрез кулисно-винтового поворотного механизма по С-С фиг.2.
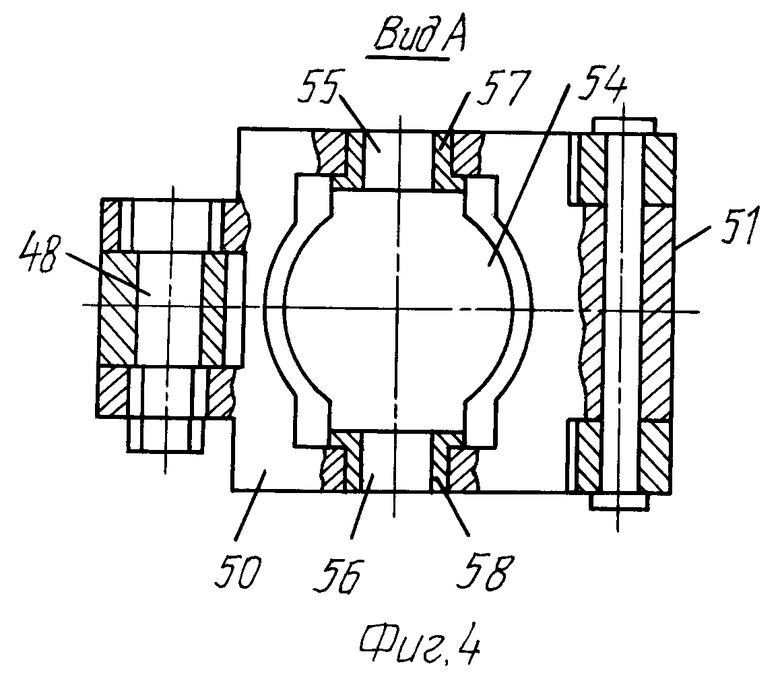
На фиг.4 изображен вид рычажной передачи по стрелке А фиг.2.
На фиг.5 изображен вид фигурного болта.
На фиг.6 изображена вторая проекция фигурного болта.
Лучшие варианты осуществления изобретения
Пневматический привод (фиг. 1) содержит последовательно соединенные электропневматическое управляющее устройство 1, включающее в себя конечные выключатели 2, 3, электропневмоклапаны 4, 5, входы которых связаны с источником рабочего тела - сжатого газа (не обозначен) с давлением Р, а выходы через регуляторы расхода газа 6, 7 - с ротором 8 реверсивного струйного двигателя 9. Выходной вал двигателя 9 снабжен зубчатым венцом 10 и через механический редуктор 11, содержащий ручной дублер 12, и через кулисно-винтовой поворотный механизм 14 связан с выходным валом 15 привода и далее - с объектом управления - шаровым краном 18.
Кулисно-винтовой поворотный механизм 14 содержит корпус 21, кулисно-винтовую передачу, включающую в себя кулису 22 с пазами, жестко закрепленную на выходном валу 15 привода, установленный в корпусе 21 ходовой винт 23, имеющий возможность ограниченного осевого перемещения и связанный с выходом редуктора 11, ходовую гайку 24 (фиг.3), установленную в поводке 25.
Корпус 21 кулисно-винтового поворотного механизма выполнен в виде центрального тела 31, соединенного с днищем 32 и крышкой 33 (фиг.3), при этом в корпусе 21 выполнен сквозной направляющий паз 35 с параллельными стенками, в котором размещен поводок 25 с прямоугольным поперечным сечением и внутренней цилиндрической полостью с боковыми углублениями, в которой размещена ходовая гайка 24, снабженная боковыми выступами 37, входящими в углубления поводка 25, причем ходовая гайка 24 размещена в поводке 25 с люфтами в поперечном направлении; при этом гайка 24 соединена самотормозящейся резьбой с ходовым винтом 23, причем поводок 25 имеет с двух сторон укороченные цапфы с одним ползуном 38, 39 на каждой, которые размещаются подвижно, соответственно, в пазах кулисы 22.
Кулисно-винтовой поворотный механизм 14 содержит также устройство поглощения кинетической энергии подвижных частей привода, выполненное в виде набора тарельчатых пружин 42 и двух втулок 43, 44, собранных на штоке 45, установленном в корпусе 21 поворотного механизма 14 параллельно оси ходового винта 23 с возможностью ограниченного осевого перемещения, снабженном двумя кольцевыми упорами 47, 48 и соединенного подвижно с помощью фигурного болта 49 с одним концом рычага 50 рычажной передачи, второй конец которого соединен неподвижно с помощью кронштейна 51 с корпусом поворотного механизма 14, а в промежуточной точке рычаг 50 соединен подвижно с ходовым винтом 23 с помощью двухстороннего упорного подшипника 53, при этом подшипник 53 размещен в корпусе 54, подвижно соединенном с рычагом 50, причем среднее кольцо подшипника жестко закреплено на ходовом винте 23; при этом корпус имеет с двух сторон упоры 55, 56 (фиг.4) с ползунами 57, 58, которые размещаются подвижно в двух пазах, выполненных в теле рычага 50.
Кулисно-винтовой поворотный механизм 14 содержит также регулируемые винтовые упоры 61, 62, при этом с днищем 32 корпуса 21 поворотного механизма соединен сменный установочный фланец 64.
Выходной вал 15 привода соединен с входным валиком 66 электропневматического управляющего устройства 1 и далее - с подвижными постоянными магнитами 67, 68, связанными магнитным полем с конечными выключателями 2, 3.
Пневматический привод работает следующим образом.
При поступлении на электропневматическое управляющее устройство 1 (фиг. 1) управляющего сигнала на поворот выходного вала 15 привода, например на электропневмоклапан 5, последний срабатывает и через регулятор расхода газа 7 подает сжатый газ от источника сжатого газа в ротор 8 струйного двигателя 9. Сжатый газ, вытекая из сопла ротора, создает движущий момент на валу ротора 8.
Движущий момент ротора 8 передается через зубчатый венец 20, редуктор 11 и далее через шлицевую передачу на ходовой винт 23. При вращении ходового винта 23 закрепленная на нем ходовая гайка 24 с поводком 25 перемещается вдоль ходового винта 23 и поворачивает кулису 22 и с ней выходной вал 15 привода и далее регулирующий орган объекта управления 15, одновременно поворачивая связанный с выходным валом 15 входной валик 66 электропневматического управляющего устройства 1, связанный с постоянными магнитами 67, 68 конечных выключателей 2, 3. При подходе выходного вала 15 и кулисы 22 конечный выключатель 3 размыкается и отключает электропневмоклапан 5, в результате чего электропневмоклапан 5 закрывается и подача сжатого газа в ротор 8 струйного двигателя прекращается, однако вращение ротора и движение связанных с ним подвижных частей привода продолжается по инерции за счет запасенной ими кинетической энергии.
При посадке кулисы 22 на механический упор, например 61, кулиса 22, выходной вал 15, поводок 25, ходовая гайка 24 останавливаются, а ходовой винт 23 продолжает вращаться и ввинчивается в гайку 24, перемещаясь вдоль своей оси вправо, и через упорный подшипник 53, корпус 54 и ползуны 57, 58 поворачивает рычаг 50 против часовой стрелки; при этом конец рычага 50 через фигурный болт 49 перемещает шток 45 устройства поглощения кинетической энергии подвижных частей привода вправо, сжимая через упор 47 и втулку 44 пакеты тарельчатых пружин 42, которые при этом поглощают кинетическую энергию подвижных частей привода, причем сжатие пружин происходит до тех пор, пока вся кинетическая энергия подвижных частей привода не преобразуется в потенциальную энергию сжатых пружин 42, после чего движение ходового винта 23 ротора 8 струйного двигателя 9 и других подвижных частей прекращается. Самопроизвольного разжатия пружины 42 произойти не может, так как резьба ходового винта 23 и ходовой гайки 24 самотормозящаяся.
Для поворота выходного вала 15 привода в обратную сторону управляющее напряжение подается на электропневмоклапан 4, который открывает доступ сжатого газа в ротор 8 с противоположной стороны ротора, при этом ротор 8 и выходной вал 15 привода вращаются в противоположную сторону до подхода вала 15 и кулисы 22 в новое крайнее положение. При этом размыкаются контакты соответствующего конечного выключателя 2, электропневмоклапан 4 закрывается, подача газа в ротор 8 двигателя 9 прекращается.
Пневматический привод предназначен для запорно-регулирующей арматуры газонефтепродуктопроводов при дистанционном и местном управлении. Пневматический привод содержит последовательно соединенные электропневматическое управляющее устройство, включающее в себя конечные выключатели, электропневмоклапаны, регуляторы расхода газа, реверсивный струйный двигатель, вал которого через механический редуктор, содержащий ручной дублер, и через кулисно-винтовой поворотный механизм, содержащий корпус, установочный фланец, ходовой винт, ходовую гайку, поводок, кулису, устройство поглощения кинетической энергии привода, связан с выходным валом привода, при этом ходовой винт и устройство поглощения кинетической энергии подвижных частей привода соединены между собой рычажной передачей, при этом устройство поглощения кинетической энергии подвижных частей привода размещено в корпусе поворотного механизма параллельно ходовому винту. Технический результат - повышение надежности. 8 з.п.ф-лы, 6 ил.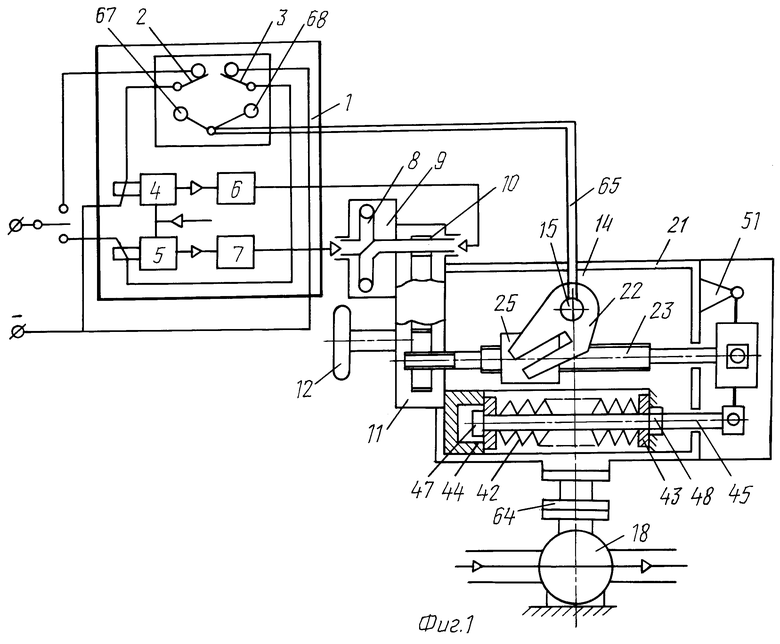
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ГУРЕВИЧ А.Ф | |||
| и др | |||
| Справочник по арматуре для газо- и нефтепроводов | |||
| - Л.: Недра, 1988, с.348 | |||
| ГУРЕВИЧ А.Ф | |||
| и др | |||
| Справочник по арматуре для газо- и нефтепроводов | |||
| - Л.: Недра, 1988, с.346 | |||
| DE 3142583 А1, 15.05.1983 | |||
| US 4437386 А, 20.03.1984. | |||

