Область техники, к которой относится изобретение
Изобретение относится к области пневмомашиностроения, в частности к механизмам, предназначенным для перестановки, следящего и программного управления регулирующими органами запорно-регулирующей арматуры газо-нефте-продуктоприводов при дистанционном и местном управлении.
Предшествующий уровень техники
Известен пневматический привод с поршневыми двигателями, содержащий пневматические поршневые двигателями (пневмоцилиндры) с кольцевыми резиновыми уплотнениями, кулисный поворотный механизм, конечные выключатели (см. А.Ф.Гуревич и др. Справочник по арматуре для газо-нефтепроводов. Ленинград: Недра. 1988 г. стр.346 рис.8.4).
Техническими недостатками этого привода являются: наличие подвижных трущихся уплотнений (резиновых колец), снижающих надежность и ресурс привода, большой объем полостей цилиндров, заполняемых газом, что приводит к возможности ударных воздействий на объект управления; возможность самопроизвольного поворота выходного вала привода под действием внешней среды. Известен пневматический привод со струйным двигателем (патент РФ №2217626) «Пневматический привод со струйным двигателем для запорно-регулирующей арматуры газо-нефтепроводов, струйный двигатель, механическая зубчатая передача, кулисно-винтовой поворотный механизм, устройство управления приводом (варианты)».
Техническими недостатками данной конструкции привода являются:
1. Сложность конструкции устройства поглощения кинетической энергии подвижных частей привода, содержащего 2 упорных подшипника.
2. Сложность рычажной передачи от ходового винта привода к пакету тарельчатых пружин.
Раскрытие сущности изобретения
Технической задачей изобретения является упрощение конструкции, повышение надежности, уменьшение габаритов привода.
Эта техническая задача решается за счет того, что на одном конце ходового винта кулисно-винтового поворотного механизма установлен упорный подшипник, при этом подшипник помещен в корпус, причем корпус установлен в корпусе кулисно-винтового поворотного механизма, с возможностью ограниченного перемещения вдоль оси ходового винта и без возможности поворота вокруг этой оси, при этом корпус соединен с упругим элементом, соединенным с корпусом кулисно-винтового поворотного механизма.
Эта техническая задача решается также за счет того, что корпус связан с упругим элементом с помощью рычажной передачи.
Эта техническая задача решается также за счет того, что упругий элемент выполнен в виде пакета тарельчатых пружин.
Эта техническая задача решается также за счет того, что упругий элемент расположен внутри корпуса кулисно-винтового поворотного механизма, параллельно ходовому винту.
Причинно-следственная связь между достигаемым техническим результатом и совокупностью признаков
Упрощение конструкции и повышение надежности привода достигается за счет того, что на одном конце ходового винта установлен упорный подшипник, при этом помещен, с осевым зазором, в корпус, а корпус установлен в корпусе кулисно-винтового поворотного механизма с возможностью ограниченного перемещения вдоль оси ходового винта и без возможности поворота вокруг этой оси, при этом корпус соединен с упругим элементом, соединенным с корпусом кулисно-винтового поворотного механизма.
Уменьшение габаритов привода достигается за счет того, что:
- корпус связан с упругим элементом с помощью рычажной передачи;
- упругий элемент выполнен в виде пакета тарельчатых пружин;
- упругий элемент расположен внутри корпуса кулисно-винтового поворотного механизма, параллельно ходовому винту.
Краткое описание чертежей
Изобретение поясняется далее описанием примера осуществления со ссылкой на чертежи, где
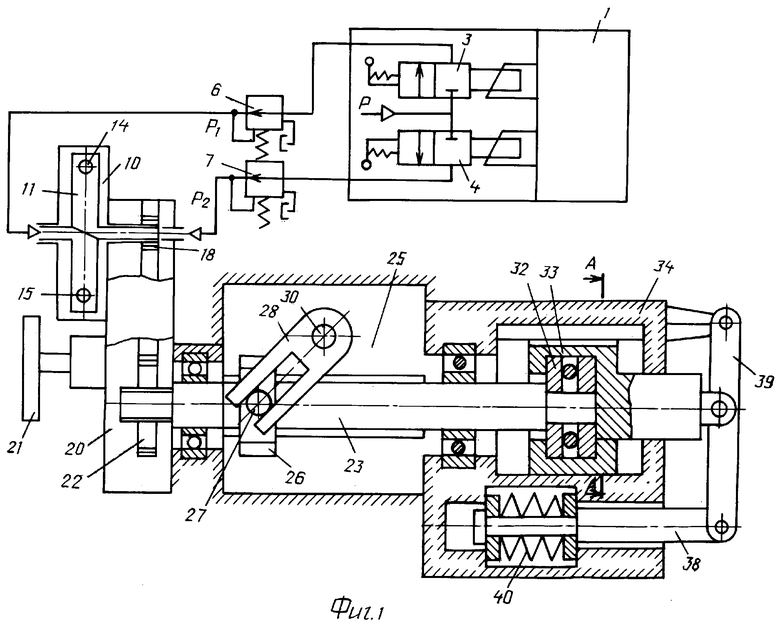
на фиг.1 изображена схема пневматического привода
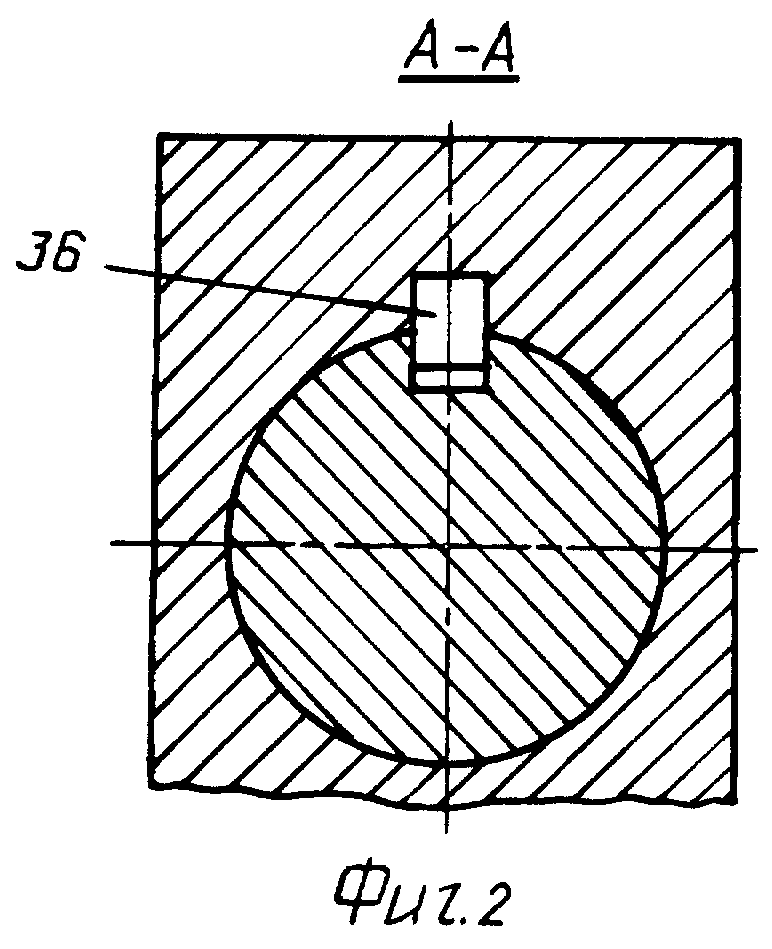
на фиг.2 изображено сечение по АА фиг.1.
Варианты осуществления изобретения
Пневматический привод (фиг.1) содержит последовательно соединенные управляющие устройства 1; электропневмоклапаны 3,4; регуляторы давления газа 6, 7; пневматический струйный двигатель 10 с ротором 11 и соплами 14, 15, на валу которого имеется зубчатый венец 18, входящий в зацепление с шестернями редуктора 20, содержащего ручной дублер 21.
Выходная шестерня 22 редуктора соединена с ходовым винтом 23 кулисно-винтового поворотного механизма 25, на котором на резьбе установлена ходовая гайка 26 с поводком 27, который подвижно соединен с кулисой 28, жестко связанной с выходным валом 30 привода. Ходовой винт 23 установлен с возможностью ограниченного осевого перемещения, при этом на конце винта (на фиг.1 - правый конец) установлен упорный подшипник 32, который с осевым зазором помещен в корпус 33, который установлен в корпусе 34 кулисно-винтового поворотного механизма 25 с возможностью ограниченного перемещения вдоль оси ходового винта 23 и без возможности поворота вокруг этой оси, что обеспечивается шпонкой 36 (фиг.2). Корпус 33 соединен через рычажную передачу 37 и шток 38 с упругим элементом 40, выполненным в виде пакета тарельчатых пружин.
На фиг.1 обозначены так же: входное давление рабочего газа Р и давление P1 и Р2 на выходе регуляторов давления 6 и 7.
Объект управления - регулирующий орган (затвор) шарового крана с выходным валом привода на схеме на фиг.1 не показан.
Привод работает следующим образом. При поступлении с устройства управления 1 электрического сигнала на поворот выходного вала привода (например, на открытие крана), например, на электропневмоклапан 3, клапан открывается и сжатый газ от источника (на схеме фиг.1 не показан) с давлением Р поступает на вход регулятора давления газа 6 и, далее, с давлением P1 поступает в ротор 11 двигателя 10 и, вытекая через сопло 15, создает движущий момент ротора. Ротор начинает вращаться, это вращение через зубчатый венец 18 и шестерни редуктора 20 передается на шестерню 22 и ходовой винт 23. При вращении ходового винта ходовая гайка 26 перемещается вдоль оси винта и через поводок 27 поворачивает кулису 28 и жестко соединенный с ней выходной вал 30 привода и соединенный с выходным валом затвор шарового крана (на схеме на фиг.1 не показан). При установке выходного вала привода в новое крайнее положение, кулиса 28 «садится» на упор и вместе с выходным валом 30, ходовой гайкой 26 и поводком 27 останавливается. При этом управляющее устройство 1 подает сигнал на закрытие электропневмоклапана 6. Клапан 6 закрывается, и подача сжатого газа в двигатель 10 прекращается. Однако ротор 11 двигателя, шестерни редуктора и ходовой винт 23 продолжают вращаться «по инерции» за счет кинетической энергии, запасенной ими в процессе движения. При этом ходовой винт 23, вращаясь в остановившейся неподвижной ходовой гайке 24, перемещается вдоль своей оси и через упорный подшипник 22, корпус 33, рычаг 37 и шток 38 сжимает упругий элемент (пакет тарельчатых пружин) 40 до тех пор, пока вся кинетическая энергия подвижных частей не преобразуется в потенциальную энергию сжавшегося упругого элемента 40 («поглотится» им).
Для поворота выходного вала привода в противоположную сторону сигнал управляющего устройства 1 подается на пневмоэлектроклапан 7.
Практическая необходимость и возможность реализации данного изобретения подтверждается многолетним опытом промышленного производства и эксплуатации пневматических приводов со струйным двигателем для шаровых кранов газопроводов в условиях крайнего севера.
Пневматический привод содержит последовательно соединенные: управляющее устройство, электропневмоклапаны, регуляторы давления (расхода) газа, пневматический струйный двигатель, редуктор, кулисно-винтовой поворотный механизм, содержащий устройство поглощения кинетической энергии подвижных частей привода, ходовой винт, ходовую гайку, соединенную подвижно с кулисой, которая жестко соединена с выходным валом привода. При этом ходовой винт установлен с возможностью ограниченного осевого перемещения и соединен с устройством поглощения кинетической энергии подвижных частей привода через упорный подшипник и рычажную передачу. Технический результат - повышение надежности. 3 з.п. ф-лы, 2 ил.
1. Пневматический привод для шаровых кранов газопроводов, содержащий последовательно соединенные: управляющее устройство, электропневмоклапаны, регуляторы давления газа, реверсивный пневматический струйный двигатель, редуктор, содержащий ручной дублер, кулисно-винтовой поворотный механизм, содержащий корпус, кулису, соединенную с выходным валом привода, ходовой винт, резьбой связанный с ходовой гайкой с поводком, подвижно связанным с кулисой, устройство поглощения кинетической энергии подвижных частей привода, отличающийся тем, что на одном конце ходового винта установлен упорный подшипник, при этом подшипник помещен, с осевым зазором, в корпус, который установлен в корпусе кулисно-винтового поворотного механизма с возможностью ограниченного перемещения корпуса вдоль оси ходового винта и без возможности поворота вокруг этой оси, при этом корпус соединен с упругим элементом, связанным с корпусом кулисно-винтового поворотного механизма.
2. Привод по п.1, отличающийся тем, что корпус связан с упругим элементом с помощью рычажной передачи.
3. Привод по п.1 отличающийся тем, что упругий элемент выполнен в виде пакета тарельчатых пружин.
4. Привод по п.1, отличающийся тем, что упругий элемент расположен внутри корпуса кулисно-винтового поворотного механизма параллельного ходовому винту.
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ГАЗОНЕФТЕПРОВОДОВ, СТРУЙНЫЙ ДВИГАТЕЛЬ, МЕХАНИЧЕСКАЯ ЗУБЧАТАЯ ПЕРЕДАЧА, КУЛИСНО-ВИНТОВОЙ ПОВОРОТНЫЙ МЕХАНИЗМ, УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ (ВАРИАНТЫ) | 2003 |
|
RU2217626C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОРШНЕВЫХ И СТРУЙНЫХ ПНЕВМОПРИВОДОВ ШАРОВЫХ КРАНОВ ТРУБОПРОВОДОВ | 2001 |
|
RU2194885C1 |
| US 4437386 А, 20.03.1984 | |||
| УСТРОЙСТВО ИНЖЕКТИРОВАНИЯ СМОЛЫ ДЛЯ БУРИЛЬНОГО УСТРОЙСТВА ДЛЯ УСТАНОВКИ АНКЕРНЫХ БОЛТОВ В ГРУНТ | 2012 |
|
RU2600120C2 |

