Использование в дистанционных системах управления запорно-регулирующих арматурой газо-, нефте- и продуктопроводов. Сущность изобретения: привод, содержащий электропневматическое управляющее устройство, пневматический струйный двигатель, редуктор, ручной дублер, поворотный механизм снабжен устройствами регулирования времени поворота выходного вала привода в функции от изменения давления рабочей среды и нагрузки на объекте регулирования, устройством ограничения максимальной величины передаваемого движущегося момента и связанным с ним устройством поглощения кинетической энергии подвижных частей привода.
Струйный двигатель выполнен с системой направленного отвода рабочей среды, сменными дросселирующими элементами и соплами, а редуктор обеспечивает возможность изменения передаточного числа. Электропневматическое управляющее устройство выполнено в одном блоке, включающем в себя устройство регулирования времени поворота выходного вала привода, устройства конечных выключателей, при этом электромагниты и герконы размещены в одной взрывозащищенной камере и, в двух вариантах, двух- и трехпозиционные пневмораспределители.
Изобретение относится к области пневмомашиностроения, в частности к механизмам, предназначенным для осуществления перестановки и следящего движения запорной и регулирующей арматуры газо-нефте-продуктопроводов.
Известен пневматический привод с поршневым двигателем, содержащий пневмоцилиндры, поршни, поворотный механизм, конечные выключатели [1 стр. 346].
Техническими недостатками этого привода являются: наличие подвижных трущихся уплотнителей, снижающее надежность и ресурс привода, больший объем полстей, заполняемых сжатым газом, приводящий к наличию ударных воздействий на объект управления; возможность произвольного перемещения выходного вала привода под действием внешней нагрузки.
Известен пневмогидравлический привод с поршневым двигателем, содержащим пневмогидроцилиндр, поршни, кулисный поворотный механизм, конечные выключатели [1 стр. 348].
Техническими недостатками этого привода являются: наличие второго рабочего тела - масла, что усложняет и удорожает эксплуатацию привода; наличие подвижных трущихся уплотнений; возможность произвольного перемещения под действием внешней нагрузки.
Известен пневматический привод со струйным двигателем, включающий в себя распределитель, струйный двигатель, редуктор, кулисный механизм с винтом, имеющим подпружиненные опоры [2].
Техническими недостатками этого привода являются: возможность передачи на подвижные части привода чрезмерного движущего момента, возникающего при резкой остановке привода на упорах или в промежуточном положении, обусловленного повышением скорости движения привода при повышении давления рабочей среды на входе в привод или падением нагрузки на выходном валу привода; при остановке привода в промежуточном положении продолжается подача рабочей среды в двигатель: при работе ручным дублером происходит вращение ротора двигателя; узкий диапазон давлений рабочей среды, в котором может работать привод; невозможность регулирования времени поворота вала привода из одного положения в другое.
Известен электропневматический узел управления, содержащий электромагниты, пневмоклапаны и систему пневмомагистралей [1 стр. 408].
Недостатками этого узла являются: сложность устройства обеспечения взрывозащиты и сложность конструкции трехходовых электропневмоклапанов; большие габариты и масса; необходимость дополнительного устройства конечных выключателей.
Технической задачей изобретения является создание пневматического привода для запорно-регулирующей арматуры газо-нефте-продуктопроводов, обладающего повышенной надежностью и ресурсом, способным работать в расширенном диапазоне давлений газа в трубопроводе от 1,0 до 15 МПа, повышенным моментом трогания, расширенным диапазоном установки и регулирования мощности движущего момента, времени поворота выходного вала из одного крайнего положения в другое, расширенными функциональными возможностями, улучшенными эксплуатационными и экологическими характеристиками.
Эта техническая задача решается согласно изобретению за счет технического результата, состоящего в снабжении привода устройством регулирования времени поворота выходного вала из одного положения в другое, устройством ограничения максимальной величины передаваемого движущего момента, устройством поглощения кинетической энергии подвижных частей привода, обеспечением направленного отвода рабочей среды из двигателя, применением сменных дросселирующих элементов и сопел, размещением электромагнитов в одной взрывозащищенной камере и в одном блоке с устройством информации о положении выходного вала привода; в снабжении пневмораспределительного устройства в двух вариантах двухпозиционными и трезпозиционными пневмораспределителями.
Сущность изобретения заключается в том, что пневматический привод, содержащий последовательно соединенные электропневматическое управляющее устройство, включающее в себя электромагниты, пневмораспределители, соединенные с задающим устройством и источником рабочей среды под давлением и с реверсивным струйным двигателем, вал которого связан через редуктор последовательно с поворотным механизмом и выходным валом привода, соединенным с объектом регулирования, а также устройство информации о положении выходного вала привода, включающее в себя магнитно-герконные конечные выключатели, соединенные с электропнематическим управляющим устройством, для получения указанного технического результата снабжен подключенными к выходам пневмораспределителей устройствами регулирования времени поворота выходного вала привода из одного положения в другое, а также устройством ограничения максимальной величины передаваемого движущего момента, чувствительный элемент которого кинематически связан с выходным валом привода и устройством отключения электромагнитов пневмораспределителей, а также устройством поглощения кинетической энергии подвижных частей привода, при этом устройство регулирования времени поворота выходного вала привода, электромагниты, пневмораспределители и устройство информации о положении выходного вала привода, включающее в себя магнитно-герконные конечные выключатели, размещены в одном блоке.
Сущность изобретения заключается также в том, что внутренняя поверхность корпуса струйного двигателя выполнена в виде гладкостенного цилиндра с торцевыми поверхностями в виде параллельных гладких плоскостей, при этом в нижней части корпуса выполнено выхлопное отверстие прямоугольного сечения, длина которого равна 0,5 - 0,8 внутреннего диаметра корпуса, а ширина равна расстоянию между внутренними торцевыми поверхностями, при этом корпус может быть снабжен газоотводом, выходной конец которого выполнен в виде круглого фланца, к которому подсоединена газоотводная труба, ось которой расположена под углом 60 - 45o к оси фланца, при этом выходной фланец газоотводной трубы расположен перпендикулярно плоскости входного фланца и снабжен слабоподпружиненной крышкой, при этом газоотвод может содержать шумопоглощающее устройство.
Сущность изобретения заключается также в том, что ротор струйного двигателя может быть выполнен с двумя соплами, размещенными на плечах ротора, направленных выходными концами в одну сторону и соединенных радиальными и наклонными каналами с осевыми подводящими каналами ротора, входные концы которых направлены в разные стороны, при этом одно сопло соединено с одним осевым каналом, а второе сопло - с другим, а также в том, что струйный двигатель может быть выполнен с односторонним подводом рабочей среды в ротор, причем подводящее устройство в корпусе двигателя выполнено в виде двух концентрически расположенных трубок, образующих два концентрически расположенных канала, внешний и внутренний, каждый из которых связан с одним из подводящих патрубков, причем внутренняя трубка удлинена и имеет внешний буртик, при этом трубки размещены с зазором соосно в осевом канале ротора с образованием двух полостей, одна из которых связана с внутренним каналом и соплом или соплами, создающими движущий момент ротора в одну сторону, а другая связана с внешним каналом и с соплом или соплами, создающими движущий момент ротора в другую сторону; а также в том, что ротор струйного двигателя выполнен со сменными входными дросселирующими элементами или сменными соплами или с теми и другими вместе с различными диаметрами их дросселирующих сечений, при этом величина диаметров может меняться в пределах 1,0 - 1,8 раза; а также в том, что редуктор выполнен с возможностью изменения его передаточного числа в 1,0 - 1,8 раза путем замены сопряженных пар шестерен, а по крайней мере одна из шестерен редуктора имеет возможность свободного хода в пределах 30 - 300o.
Сущность изобретения состоит в том, что ручной дублер снабжен двухсторонней кулачковой муфтой, установленный на шлицах на одном из валов редуктора с возможностью осевого перемещения, связанной подвижно с рукояткой, а также с двумя односторонними кулачковыми полумуфтами, одна из которых жестко связана с одной из шестерен редуктора, имеющей возможность свободно поворачиваться на своем валу и соединенной кинематически с ротором двигателя и выходным валом привода, при этом двухсторонняя муфта соединена с устройством фиксации ручного дублера во включенном положении, выполненного в виде подпружиненной защелки и устройством автоматического отключения ручного дублера, выполненного в виде двухполостного пневмоцилиндра и штока с двумя поршнями, при этом шток подвижно связан с защелкой, а каждая из полостей пневмоцилиндра связана с выходом одного из пневмораспределителей.
Сущность изобретения состоит также в том, что поворотный механизм выполнен в виде передачи винт-гайка, причем гайка связана поводком с кулисой, связанной с выходным валом привода, при этом гайка и поводок соединены с возможностью взаимного смещения в плоскости, перпендикулярной оси винта, а кулиса выполнена с направляющими, несимметрично расположенными относительно оси ее вращения и установлена с образованием в крайнем положении острого угла между ее направляющими и осью винта, например 15 - 40o, винт при этом соединен с валом редуктора с возможностью осевого перемещения и соединен с устройством поглощения кинетической энергии подвижных частей привода; а также в том, что поворотный механизм может быть выполнен в виде передачи винт-гайка с возможностью осевого перемещения винта, и связанной с гайкой зубчатой рейки, входящей в зацепление с зубчатым сектором, соединенным с выходным валом привода, при этом гайка и зубчатая рейка имеют возможность взаимного смещения в плоскости, перпендикулярной оси винта, а винт связан с устройством поглощения кинетической энергии подвижных частей привода; а также в том, что поворотный механизм может быть выполнен в виде червячной передачи, причем червяк установлен с возможностью осевого перемещения и связан с устройством поглощения кинетической энергии подвижных частей привода, а червячное колесо с выходным валом привода; а также в том, что устройство поглощения кинетической энергии подвижных частей привода выполнено в виде отдельного блока, содержащего цилиндр с внутренним осевым сквозным отверстием и цилиндрическим наружным буртиком с одной стороны и резьбу с другой, при этом на цилиндре размещены два упорных подшипника с пружинами между ними, а на резьбе установлена стяжная регулировочная гайка, при этом устройство закрепляется на хвостовике ходового винта или червяка поворотного механизма, при этом энергоемкость N устройства определяется как
где J = момент инерции подвижных частей привода, приведенный к оси ходового винта;
ω - максимальная расчетная окружная скорость винта;
C - жесткость пружины;
x0 - начальное поджатие пружин;
x - максимальное расчетное поджатие пружин.
Сущность изобретения заключается также в том, что привод снабжен устройством ограничения движущего момента, включающим в себя корпус со взрывозащищенной камерой и размещенными в ней герконами, и размещенный в корпусе за пределами камеры механизм перемещения постоянных магнитов, содержащий сидящий на оси поводок, соединенный подвижно с ходовым винтом или червяком поворотного механизма, подпружиненный с другой стороны и содержащий регулировочные винты, а также установленный на той же оси держатель, на котором укреплены два постоянных магнита и имеются два рычага, подпружиненные с одной стороны двумя пружинами, расположенными в корпусе, и третий рычаг, размещающийся между регулировочными винтами поводка, при этом на держателе жестко установлены постоянные магниты, а также в том, что механизм перемещения постоянных магнитов выполнен в виде поводка, установленного на оси в корпусе механизма, и связанного с одной стороны подвижно с ходовым винтом или червяком поворотного механизма и подпружиненный с другой стороны, на котором на осях, параллельных оси поводка, установлены два держателя, на которых закреплены постоянные магниты, при этом каждый из держателей соединен отдельной пружиной с осью поводка, а в корпусе установлены регулируемые упоры.
Сущность изобретения заключается, кроме того, в том, что электропневматическое управляющее устройство, содержащее взрывозащищенную камеру, в которой размещены электрокоммутационная колодка и электромагниты, пневмораспределители, связанные толкателями с электромагнитами, а также связанные с входными и выходными пневматическими каналами электропневматического управляющего устройства для получения указанного технического результата выполнено в виде единого блока, включающего в себя панель и установленную на ней внешнюю крышку, причем на панели установлены пневмораспределители, входы которых связаны с выполненным в панели входным каналом электропневматического устройства, а выходной канал каждого из пневмораспределителей связан с одним из двух выходных каналов, при этом в панели установлен перпендикулярно ей входной валик с возможностью его вращения вокруг своей оси, один конец которого имеет паз для соединения с валом привода, а на другом установлена индикаторная стрелка, при этом на валике закреплена платформа, на которой в держателях закреплены постоянные магниты, при этом держатели могут поворачиваться вокруг оси входного валика на угол 60o с помощью регулировочных винтов, причем электромагниты и герконы установлены в единой взрывозащищенной камере, установленной на панели, при этом внешняя крышка имеет на верхней стороне прозрачный глазок, расположенный напротив индикаторной стрелки.
Сущность изобретения заключается также в том, что устройства регулирования времени поворота выходного вала из одного положения в другое размещены в теле базовой панели, причем каждое из них выполнено в виде цилиндрической полости с одним открытым, а другим глухим концом, причем со стороны глухого конца полость имеет две цилиндрические проточки, разделенные буртиком, при этом одна проточка соединена каналом с выходом пневмораспределителя а другая - с выходным каналом базовой панели, при этом наружный конец полости снабжен внутренней резьбой, а внутри полости размещен цилиндрический плунжер, имеющий на одном, внутреннем, конце цилиндрическую проточку с буртиком, а на втором уплотнительное кольцо, при этом в полости размещена пружина, один конец которой соединен с плунжером, а второй - с регулировочным винтом, установленным в резьбе наружного конца полости.
Сущность изобретения заключается также в том, что электропневматическое управляющее устройство снабжено двумя двухпозиционными пневмораспределителями, каждый из которых содержит подпружиненный сервоклапан, установленный на "седле" и механически связанный с электромагнитом, причем вход седла связан с установленным в корпусе пневмораспределителя фильтром-осушителем, связанным со входом пневмораспределителя, а выход седла связан с внутренней полостью в корпусе пневмораспределителя, выполненной в виде двух последовательно соединенных соосных цилиндров различных диаметров, при этом внешний конец первого цилиндра с большим диаметром заглушен, а вешний конец второго цилиндра, с меньшим диаметром, выполнен в виде кольцевого "седла", причем в первом цилиндре расположен поршень со штоком, конец которого со стороны "седла" подвижно соединен с подпружиненным клапаном, а второй цилиндр соединен каналом с выходным каналом базовой панели, при этом соотношение диаметров "седла" и первого цилиндра лежит в диапазоне
где D1 - диаметр 1-го цилиндра;
dс - диаметр седла.
Сущность изобретения заключается также в том, что электропневматическое управляющее устройство может быть снабжено двумя трехпозиционными пневмораспределителями, каждый из которых содержит подпружиненный сервоклапан, установленный на "седле" и механически связанный с электромагнитом, причем вход "седла" связан с установленным в корпусе пневмораспределителя фильтром-осушителем, связанным со входом пневмораспределителя, а выход "седла" связан с внутренней полостью в корпусе пневмораспределителя, выполненной в виде трех последовательно соединенных соосных цилиндров, причем второй цилиндр, с наименьшим диаметром, расположен между двумя другими, при этом внешний конец первого цилиндра, с наибольшим диаметром, заглушен, а внешний конец третьего цилиндра выполнен в виде кольцевого "седла", при этом в первом и втором цилиндрах размещены жестко связанные между собой поршни, при этом торец поршня, размещенного во втором цилиндре, снабжен уплотняющим элементом, а в третьем цилиндре размещен поршень со штоком, имеющим с одного конца, обращенного к поршню второго цилиндра, кольцевое седло и осевой канал с боковыми отверстиями, связывающие через "седло" полости второго и третьего цилиндров, а второй конец которого подвижно соединен с подпружиненным клапаном седла третьего цилиндра, при этом входной канал пневмораспределителя связан через седло с полостью третьего цилиндра, причем полость второго цилиндра связана с выхлопным каналом, выполненным в базовой панели и соединенным с окружающей средой.
Причинно-следственная связь между достигаемым техническим результатом и совокупностью признаков состоит в том, что устройство регулирования времени поворота вала привода из одного положения в другое обеспечивает требуемый расход рабочей среды через привод в функции от давления среды в газопроводе и связанной с этим величины нагрузки на выходном валу привода; "страгивающий" момент привода повышается за счет использования кинетической энергии ротора струйного двигателя и шестерен редуктора, накапливаемой при их свободном движении за счет люфта в кулачковой муфте; "безударность" остановки привода и снижение перегрузок в элементах привода осуществляется за счет сжатия пружин устройства поглощения кинетической энергии, параметры которого выбираются в соответствии с возможной для данного типоразмера привода кинетической энергией подвижных частей; ограничение предельной величины передаваемого движущего момента осуществляется за счет отключения подачи рабочей среды в двигатель при превышении допустимой величины движущего момента; предотвращение забивания выходного канала двигателя при низких температурах рабочей и окружающей среды обеспечивается за счет выбора формы и параметров внутренней полости струйного двигателя и газоотводного канала; расширение диапазона мощностей давления газа в трубопроводе, номенклатуры шаровых кранов, на которых может использоваться один и тот же типоразмер привода и расширение функциональных возможностей привода, повышение его экономичности за счет уменьшения расхода рабочей среды обеспечивается сменностью входных дросселирующих элементов и сопел и изменением передаточного числа редуктора и поворотного механизма, обеспечиваемых выбором основных исходных геометрических и кинематических параметров.
Расширение функциональных возможностей электропневматического управляющего устройства обеспечивается возможностью установки в нем предлагаемых как двухпозиционного, так и трехпозиционного пневмораспределителей, а улучшение его эксплуатационных характеристик - за счет устройства взрывозащищенной камеры с цилиндрической "щелью", размещения пневмораспределителей электромагнитов конечный выключателей в одном блоке; обеспечения снижения трудоемкости и времени регулировки конечных выключателей.
На фиг. 1 изображена схема пневматического привода Саяпина.
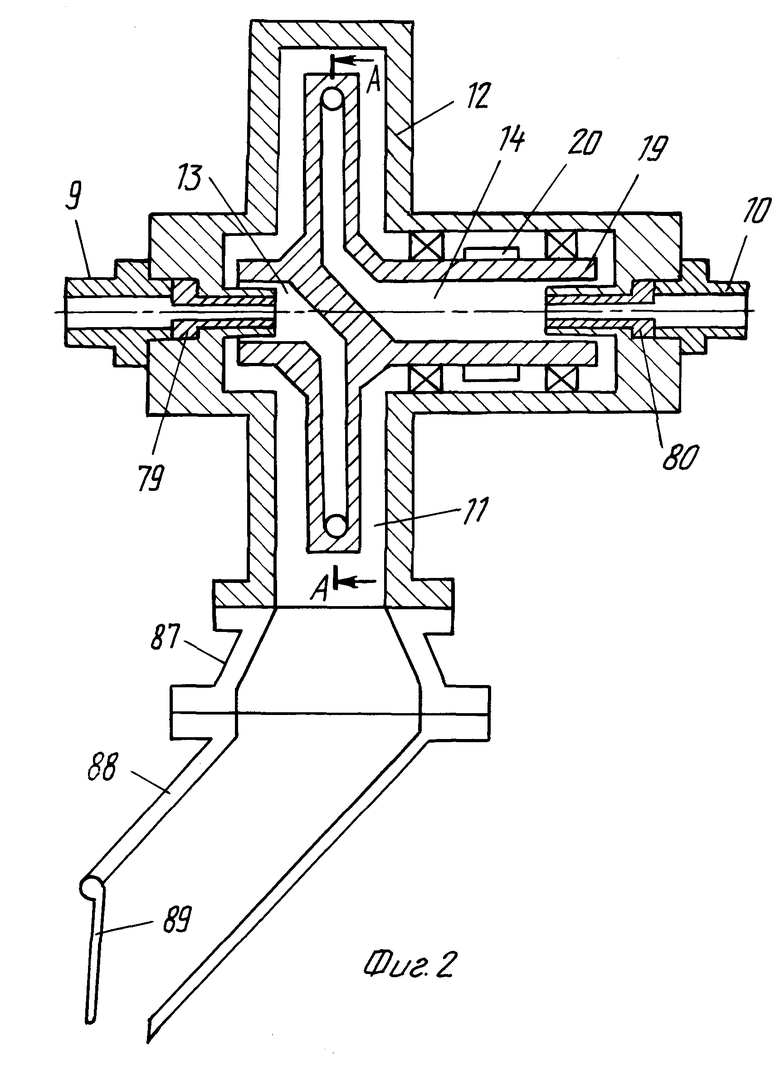
На фиг. 2 - конструкция струйного двигателя с двухсторонним подводом рабочей среды и сменными дроссельными элементами.
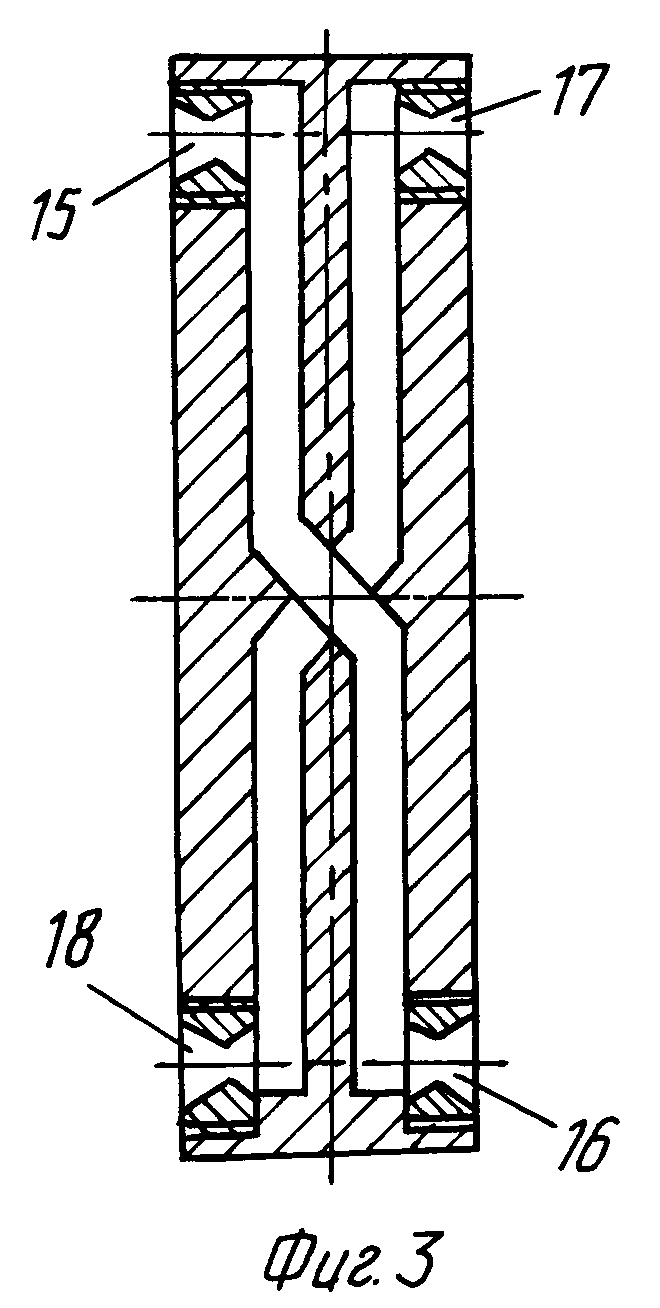
На фиг. 3 - схема ротора струйного двигателя с четырьмя сменными соплами.
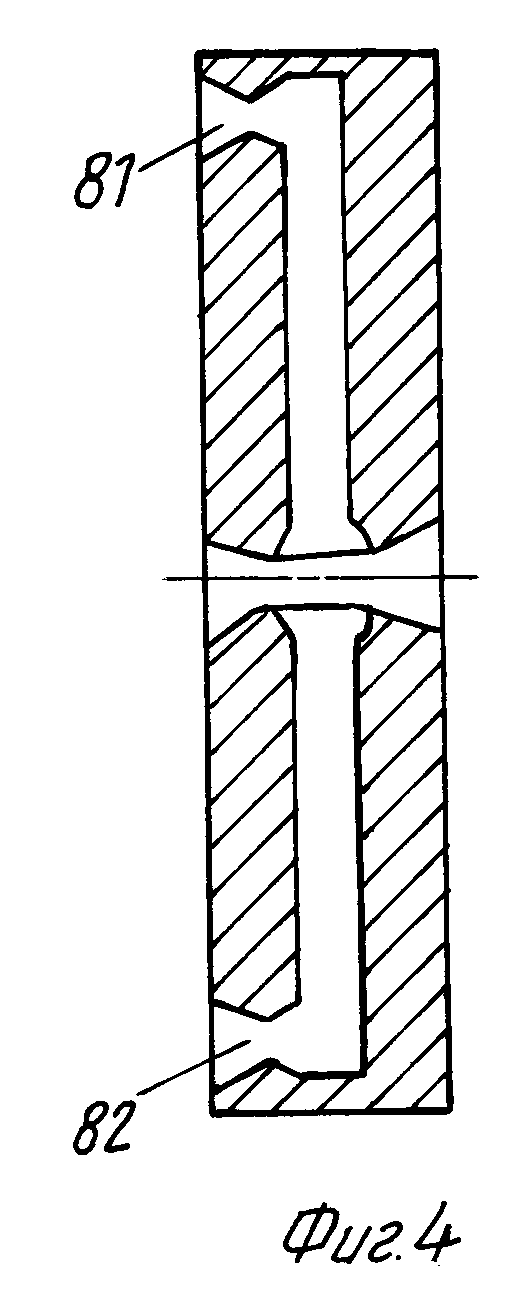
На фиг. 4 - схема ротора струйного двигателя с двумя соплами.
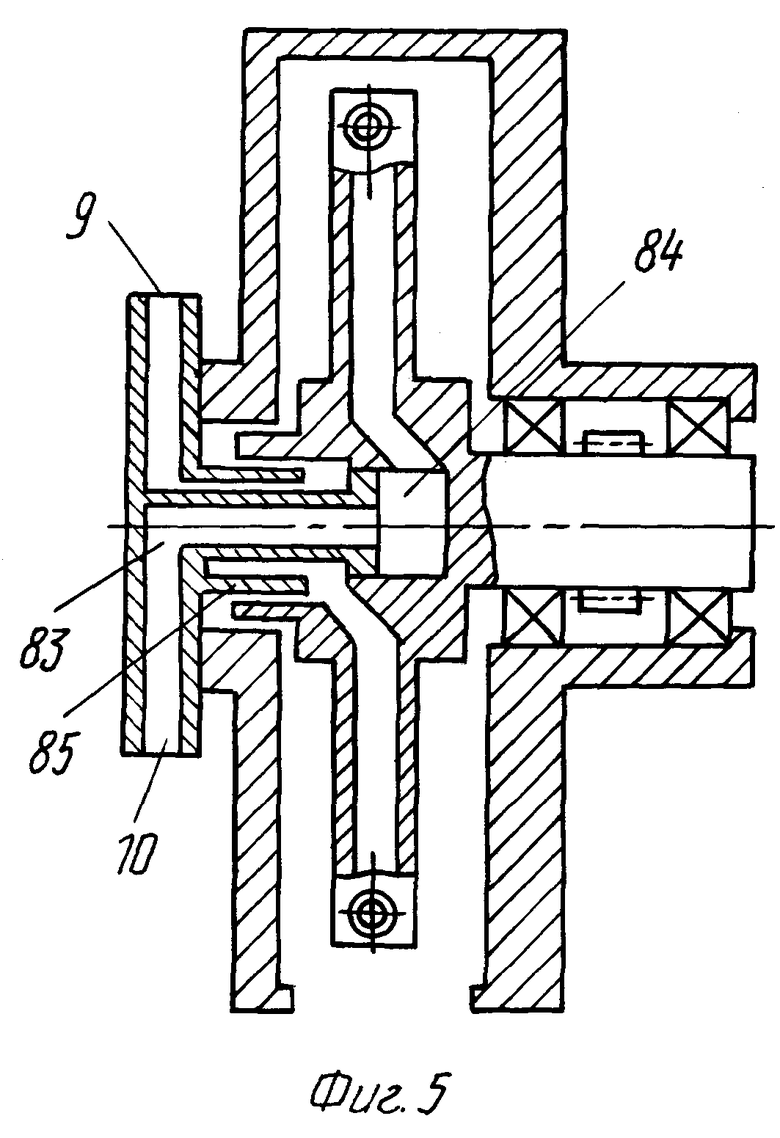
На фиг. 5 - схема струйного двигателя с односторонним поводком рабочей среды.
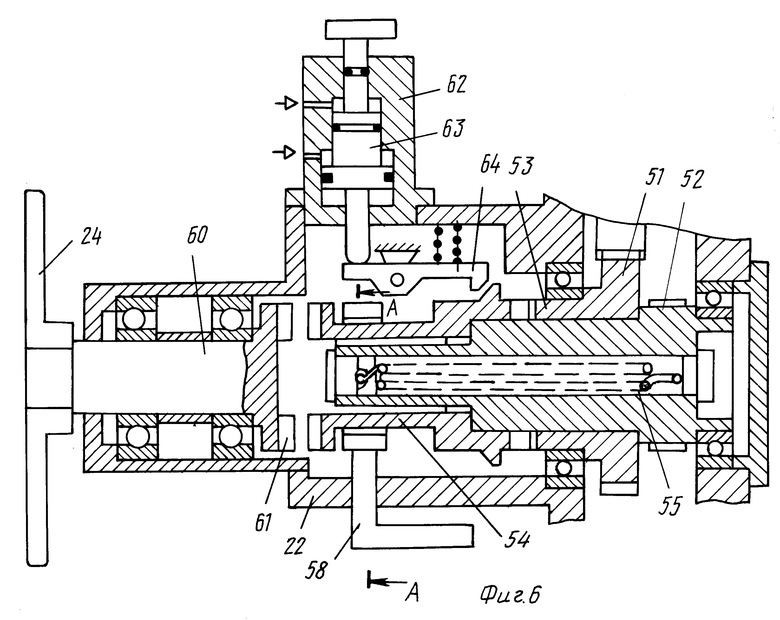
На фиг. 6 - схема ручного дублера с устройством автоматического отключения дублера при подаче рабочей среды в струйный двигатель.
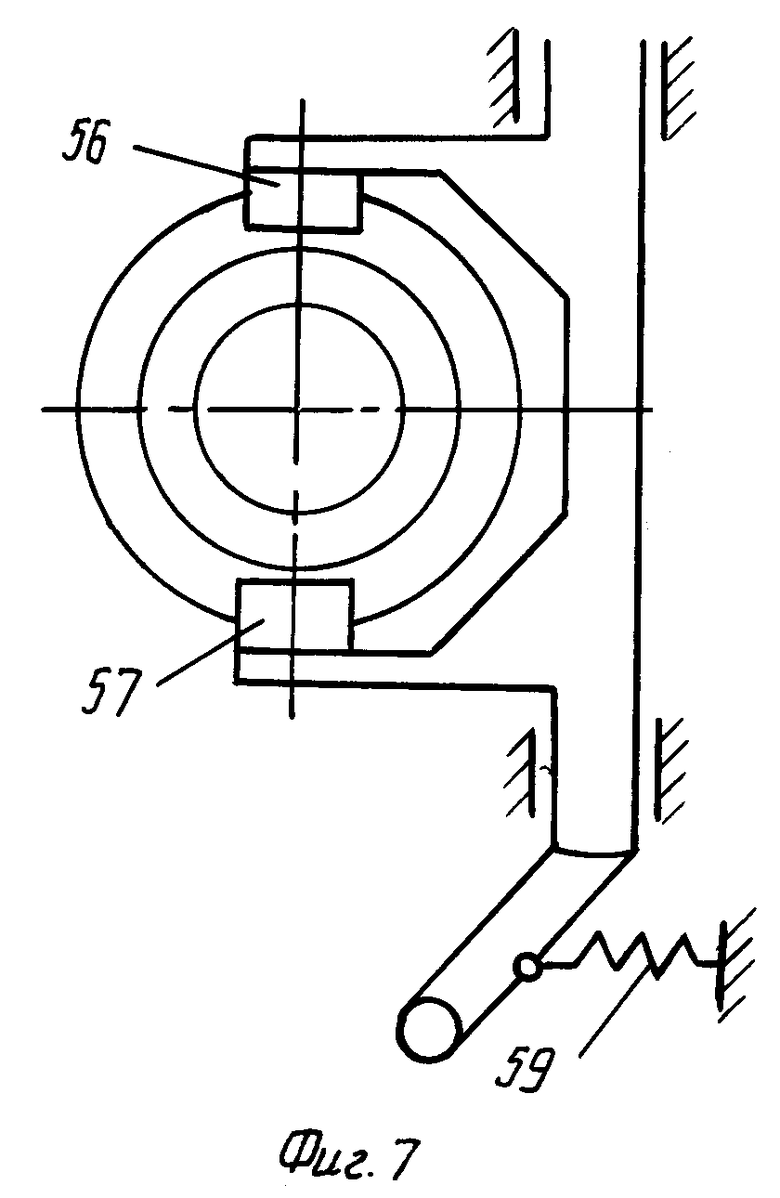
На фиг. 7 - разрез по А-А фиг.6.
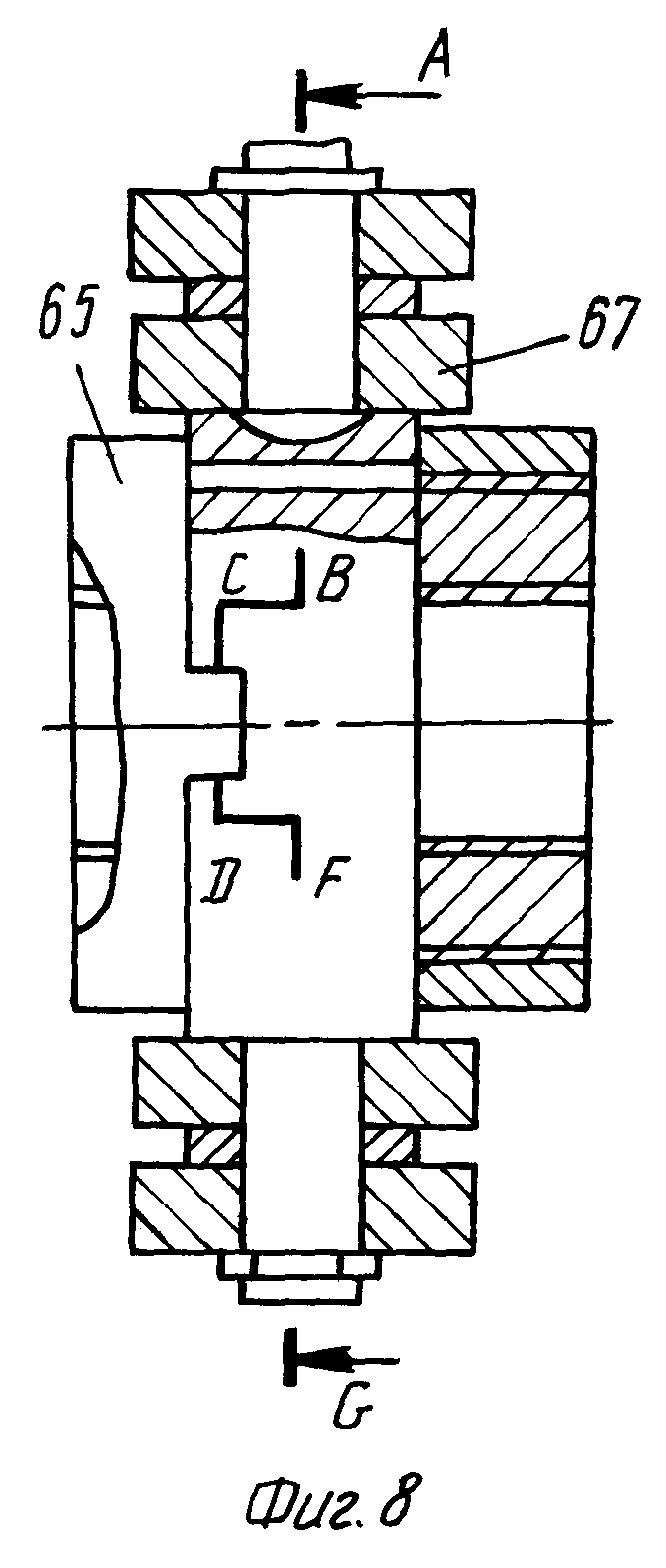
На фиг. 8 - схема взаимного расположения ходовой гайки и поводка.
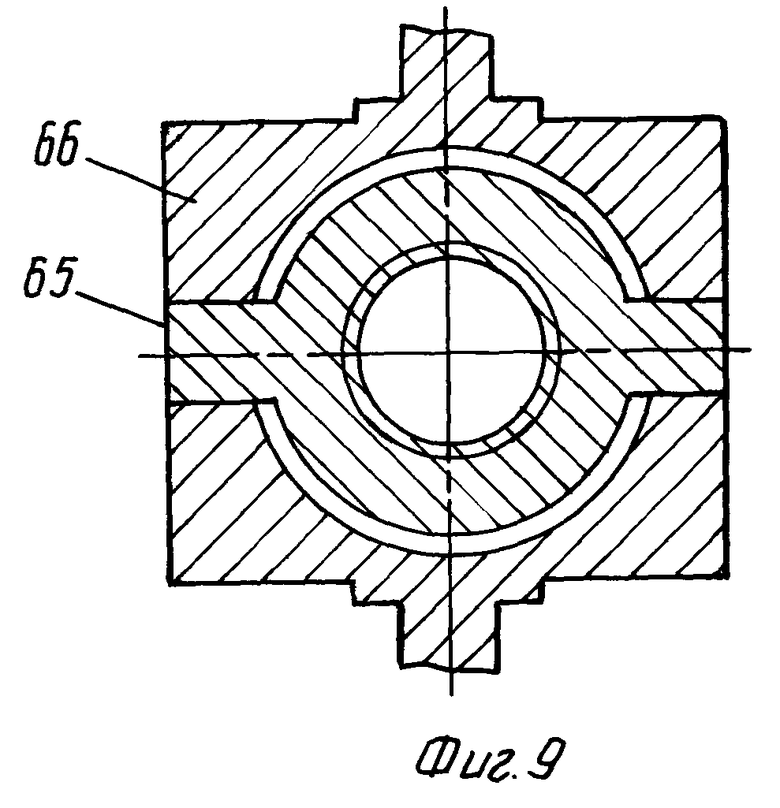
На фиг. 9 - разрез фиг. 8 по ABCDFG.
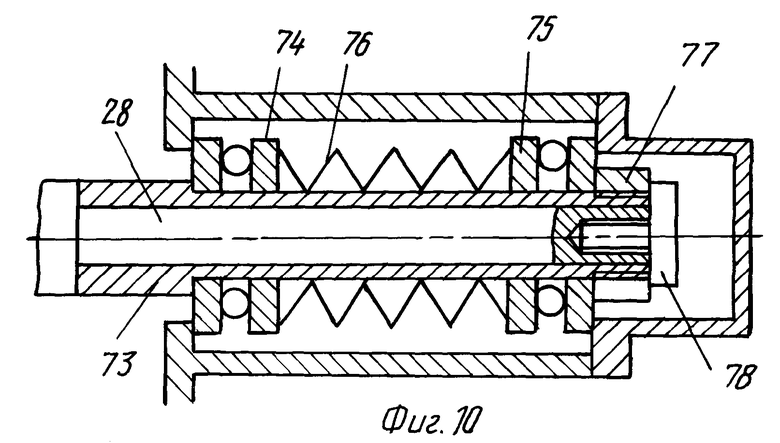
На фиг. 10 - схема автономного устройства поглощения энергии подвижных частей.
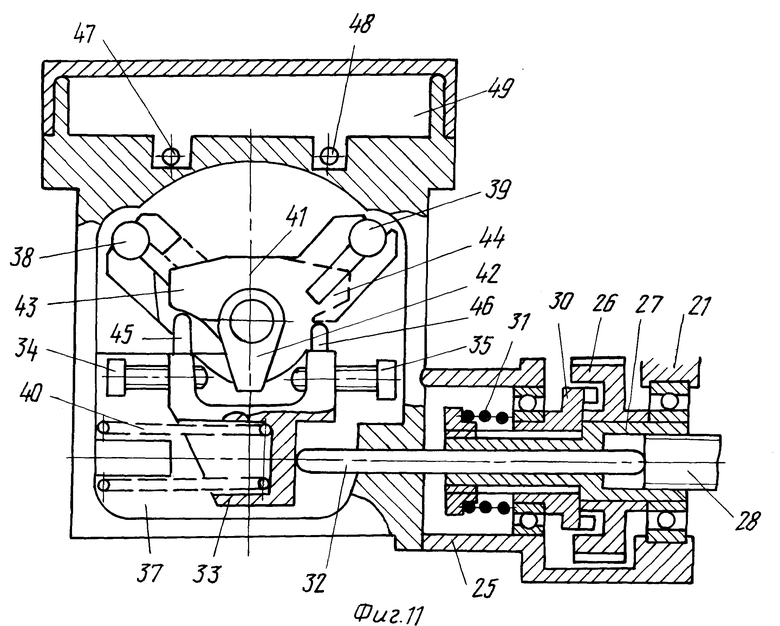
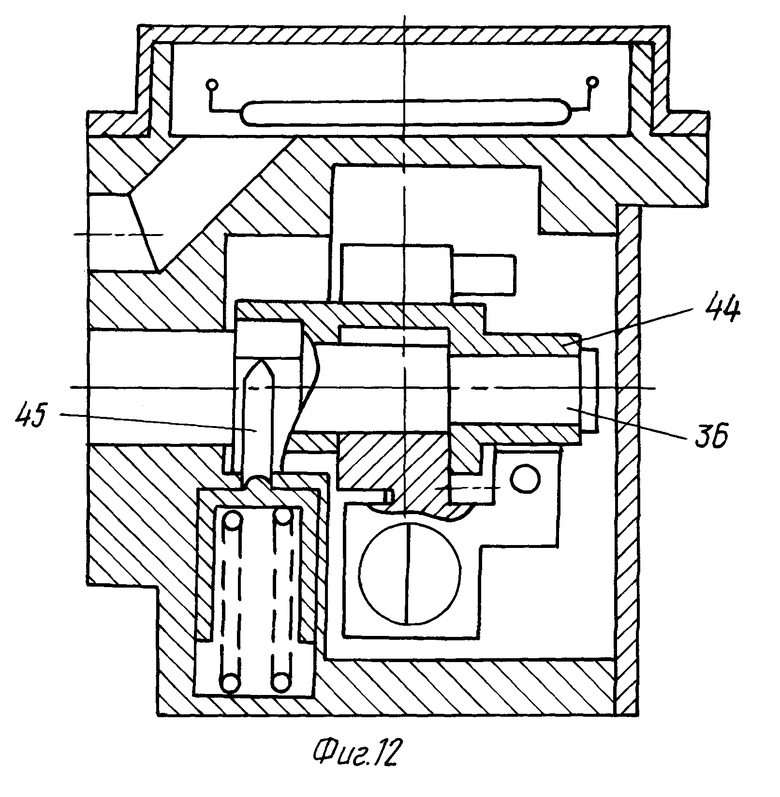
На фиг. 11 - устройство ограничения движущего момента.
На фиг. 12 - другая проекция устройства на фиг. 11.
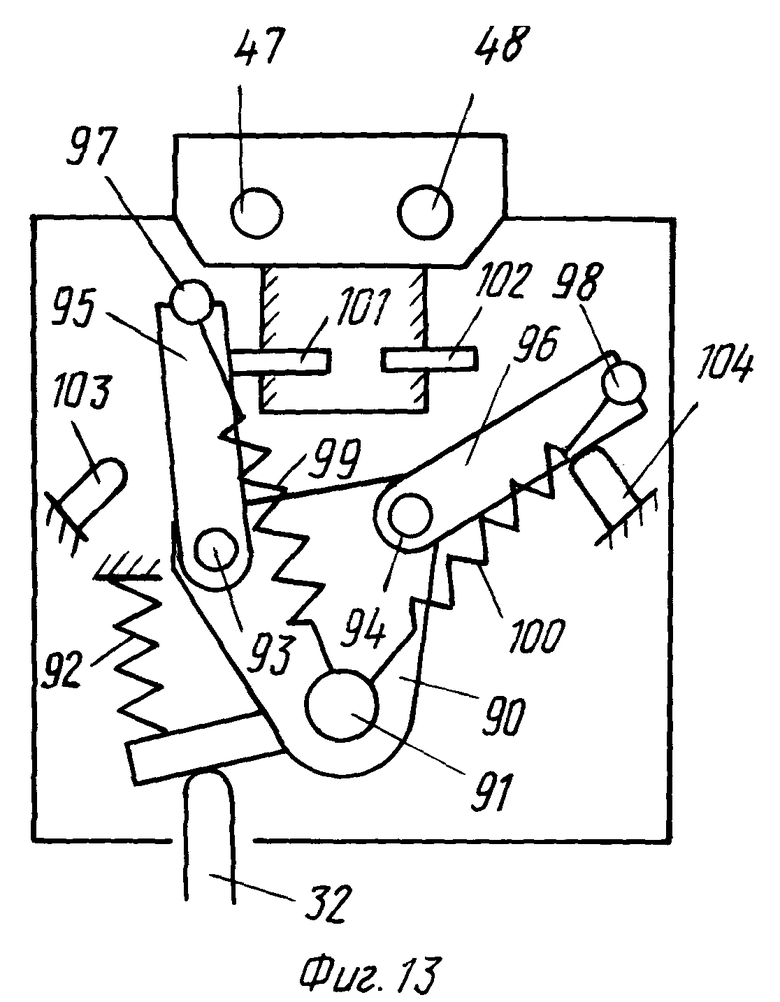
На фиг. 13 - схема устройства отключения цепи электромагнитов при одном крайнем положении элементов.
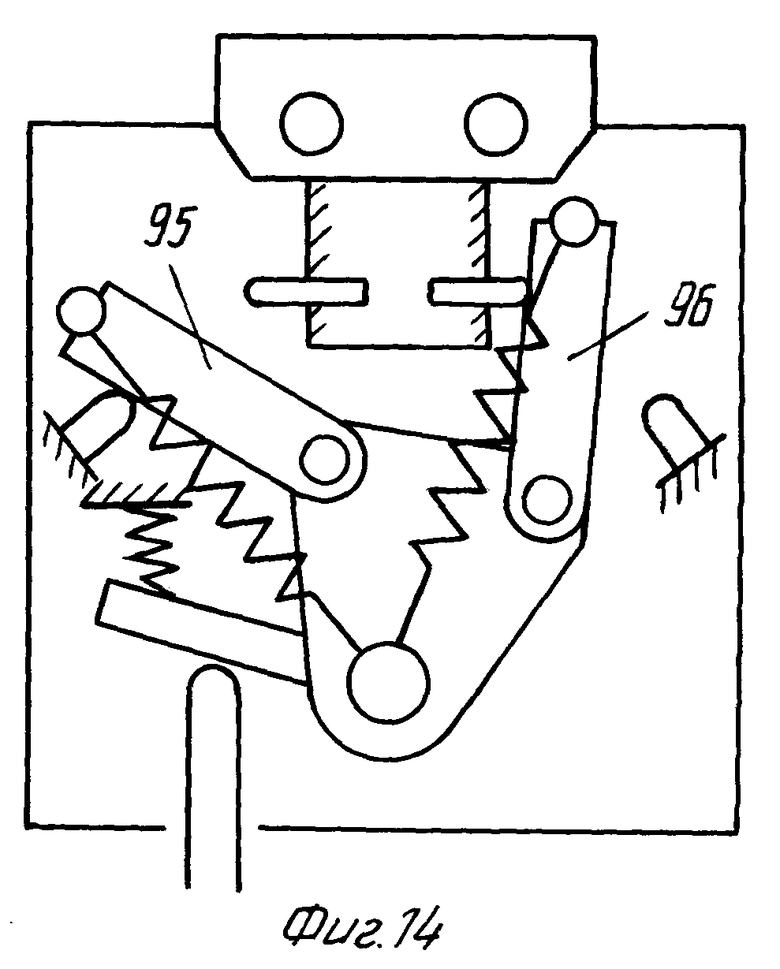
На фиг. 14 - схема по фиг. 13 при другом крайнем положении элементов.
На фиг. 15 - электропневматическое управляющее устройство.
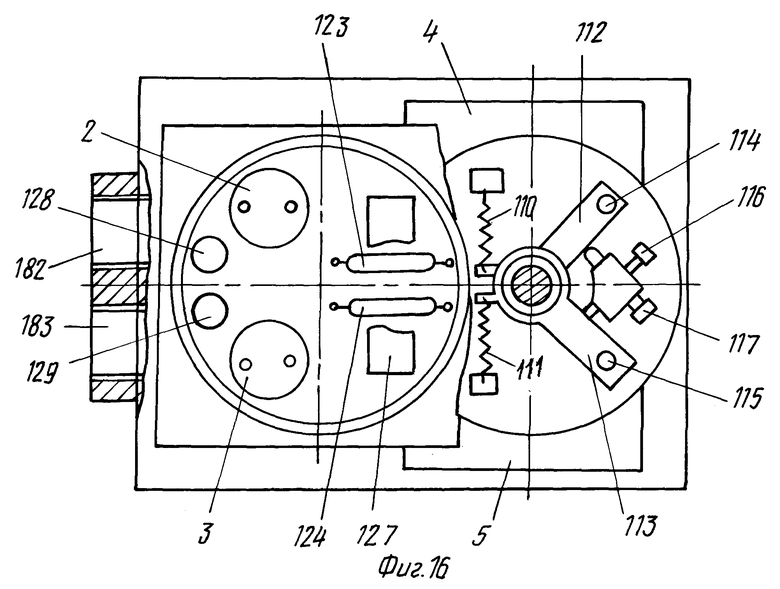
На фиг. 16 - электропневматическое управляющее устройство, вторая проекция.
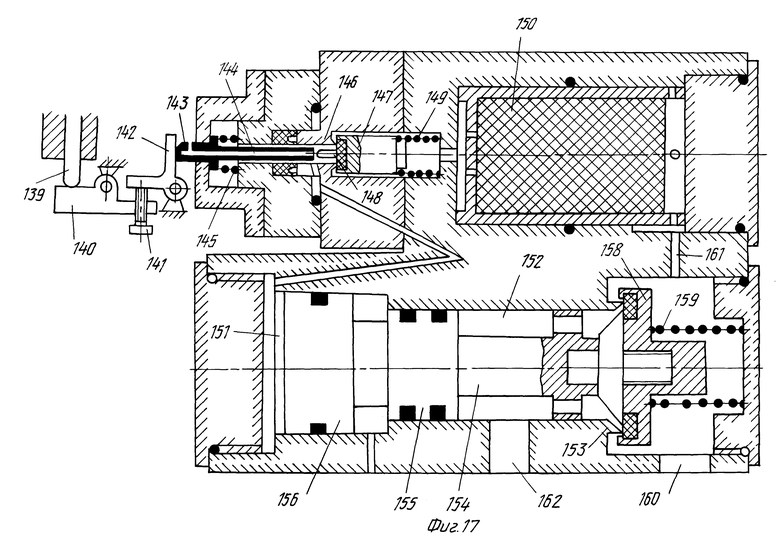
На фиг. 17 - схема двухпозиционного пневмораспределителя.
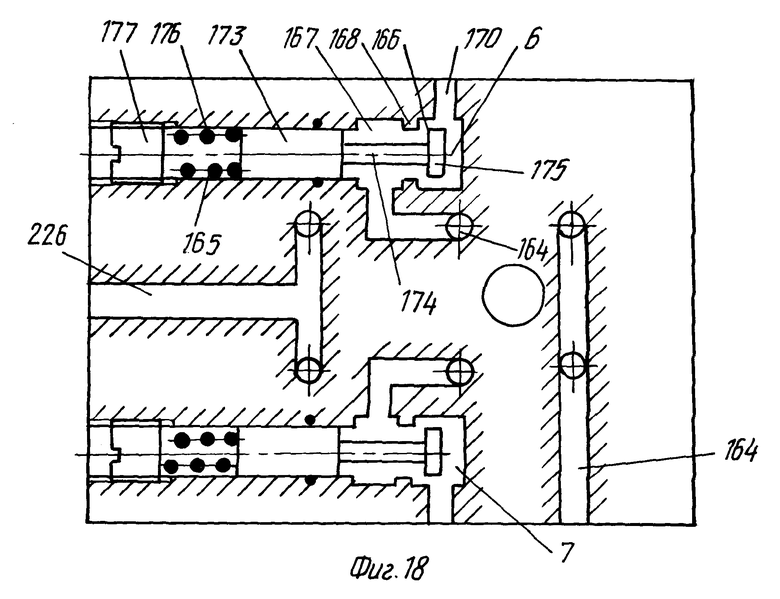
На фиг. 18 - схема устройства регулятора времени поворота выходного вала привода и газоподводящих каналов.
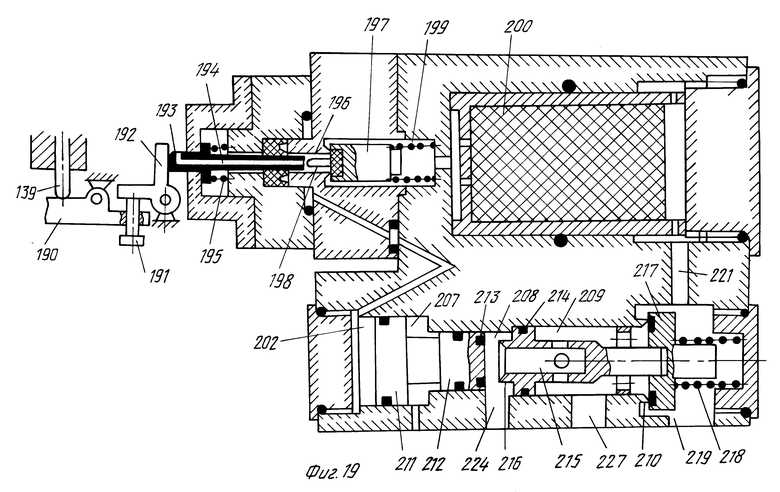
На фиг. 19 - схема трехпозиционного пневмораспределителя.
Пневматический привод Саяпина содержит электропневматическое управляющее устройство 1, включающее в себя электромагниты 2, 3, механически связанные с пневмораспределителями 4, 5, входы которых соединены с источником рабочей среды под давлением (не обозначен), а выходы соединены каналами со входами устройств 6, 7 регулирования времени поворота выходного вала 8 привода, выходы которых связаны с входными патрубками 9, 10 струйного двигателя 11, ротор 12 которого содержит осевые каналы 13, 14, связанные наклонными и радиальными каналами с соплами 15, 16, 17, 18, а вал ротора 19 с помощью зубчатого венца 20 связан с редуктором 21, который содержит ручной дублер 22 с механизмом 23 автоматического отключения штурвала 24 и устройство ограничения максимальной величины передаваемого движущего момента 25. Шестерня 26 редуктора 21 установлена с возможностью свободного вращения на валу 27, соединенным с входным элементом - ходовым винтом 28 поворотного механизма 29, и имеет с одной стороны кулачки с наклонными боковыми гранями, входящие с люфтом в зацепление с ответными кулачками полумуфты 30, установленный на шлицах или шпонке с возможностью осевого перемещения на валу 27 и подпружиненной пружиной 31. Конец ходового винта 28, 27 связан через толкатель 32 с поводком 33, снабженным регулировочным винтами 34, 35 и установленным на оси 36, закрепленный в корпусе механизма 37 поворота постоянных магнитов 38, 39, подпружиненного пружиной 40 и входящего в состав устройства 25. На оси 36 установлен держатель 41, на котором закреплены постоянные магниты 38, 39, имеющий рычаг 42 и рычаги 43, 44, подвижно соединенные с подпружиненными толкателями 45, 46. Устройство 25 содержит также нормально замкнутые герконы 47, 48, размещенные во взрывозащитной камере 49 и включенные, соответственно, в цепи электромагнитов 2, 3.
В состав ручного дублера 22 входит одна из шестерен 51 редуктора 21, установленная на валу-шестерне 52 с возможностью свободного вращения на нем и снабженная кулачковой полумуфтой 53, соединенной с ответными кулачками муфты 54, установленной на шлицах или шпонке на валу 52 с возможностью осевого перемещения, имеющей наружный буртик и проточку, и подпружиненной пружиной 55, и подвижно соединенной с рычагами 56, 57, жестко закрепленными на оси рукоятки 58, связанной с корпусом ручного дублера через пружину 59. В корпусе ручного дублера установлен в подшипниках вал 60, на одном конце которого закреплен штурвал 24, а другой конец снабжен кулачковой полумуфтой 61. С корпусом ручного дублера соединено устройство автоматического отключения штурвала, включающее в себя двухполостной пневмоцилиндр 62 и установленный в нем двойной поршень 63 со штоком, подвижно связанным с установленной на оси и подпружиненной защелкой 64.
Поворотный механизм 29 выполнен в виде кулисно-винтового механизма, входной элемент которого - ходовой винт 28 - связан с ходовой гайкой 65, соединенной подвижно с поводком 66, который через ползуны 67 и направляющие 68 связан подвижно с кулисой 69, жестко закрепленной на выходном валу 8 привода, который одним концом связан с объектом управления 70, а другим с валиком 71 электропневматического управляющего устройства 1. Ходовой винт 28 установлен в корпусе поворотного механизма 29 с возможностью осевого перемещения и соединен с устройством 72 поглощения кинетической энергии подвижных частей, выполненное в виде полого цилиндра 73, с установленными на нем с наружной стороны упорными подшипниками 74, 75 и размещенными между ними пружинами 76, при этом цилиндр 75 снабжен регулировочной гайкой 79 и закреплен винтом 80 на хвостовике ходового винта 28.
В других случаях поворотный механизм 29 может быть выполнен в виде передачи ходовой винт - ходовая гайка, связанная с зубчатой рейкой и через нее с зубчатым сектором, установленном на выходном валу привода 8 или в виде входного элемента-червяка, соединенного с червячным колесом, установленным на выходном валу 8 привода, имеющем неограниченный угол поворота.
Струйный двигатель 11 может быть выполнен со сменными, имеющими разную площадь проходного сечения, соплами и входными дросселирующими элементами.
Струйный двигатель 11 может быть выполнен с ротором, содержащим два сопла 8, 82, выходы которых направлены в одну и ту же сторону, а входы соединены радиальными и наклонными каналами, соответственно с одним из осевых каналов 13, 14. Струйный двигатель 11 может быть выполнен с односторонним подводом рабочей среды к ротору, при этом один подводящий патрубок представляет собой цилиндрическую трубку 83 с наружным буртиком на конце, образующим с ротором полость 84, соединенную с соплом или парой сопел, создающих движущий момент в одну сторону, а второй подводящий патрубок выполнен в виде трубки 85, образующей с трубкой 83 кольцевой канал, связанный с соплом или парой сопел, создающих движущий момент в другую сторону.
Струйный двигатель может быть снабжен газоотводящим устройством 87 с поворотным патрубком 88 и легкопружиненной крышкой 89, а также шумопоглощающим устройством (не обозначено).
Механизм поворота постоянных магнитов 37 может быть выполнен в виде поводка 90, установленного на оси 91 и подпружиненного пружиной 92, причем на нем установлены на осях 93, 94 держатели 95, 96 с закрепленными на них постоянными магнитами 97, 98, причем каждый держатель, соответственно, пружинами 99, 100 связан с осью 91. Механизм 37 снабжен также регулируемыми упорами 101, 102, 103, 104.
Электропневматическое устройство 1 имеет панель 106, в которой с помощью втулки 107 установлен валик 71 с возможностью поворота вокруг его оси, на котором жестко закреплена индикаторная стрелка 108 и платформа 109, на которой установлены подпружиненные пружинами 110, 111 держатели 112, 113, один из концов каждого из которой соединен подвижно с валиком 71, а на другом установлены постоянные магниты 114, 115; при этом на платформе 109 имеется кронштейн, на котором установлены регулировочные винты 116, 117.
На панели 106 установлен также корпус 120, образующий с крышкой 121 взрывозащищенную камеру 122, в которой установлены герконы 123, 124 и электромагниты 2, 3, клеммная колодка 127, а в корпусе 120 выполнены отверстия 128, 129 со взрывозащитными сальниками для вывода электрокабелей, при этом в панели 106 выполнено отверстие 131, для отвода кабелей к пульту управления (не обозначен). На панели 106 установлены пневмораспределители 4,5, при этом толкатель каждого электромагнита 2, 3 соединен с одним из пневмораспределителей, например, толкатель 139 электромагнита 2 соединен подвижно с рычагом 140, который через регулировочный винт 141 и рычаг 142 соединен с толкателем 143, имеющим сквозной канал 144 и подпружиненным пружиной 145. В корпусе пневмораспределителя выполнено "седло" 146, на котором размещен клапан 147, со штырем 148, прижимаемый к седлу 146 пружиной 149. В корпусе пневмораспределителя установлен фильтр-осушитель 150, связанный каналами через седло 146 с внутренней полостью пневмораспределителя, выполненный в виде двух соосных цилиндров 151 и 152, причем один конец цилиндра 152 выполнен в виде кольцевого "седла" 153, а внутри полости расположен шток 154 с двумя поршнями 155, 156 на одном конце, а вторым концом подвижно связанный с клапаном 158, подпружиненным пружиной 159, при этом в корпусе пневмораспределителя выполнен входной канал 160, связанный одним концом через канал 161 с фильтром-осушителем 150 и через седло 153 с каналом 162, при этом канал 160 связан с входным каналом 163 устройства 1, а канал 162 с входным каналом 164 устройства, например 6, при этом выходной канал второго распределителя связан с входным каналом устройства 7. Каждое из устройств 6, 7 регулирования времени перемещения выходного вала привода, выполненного в виде цилиндрической полости 165 с одним открытым и другим глухим концом, при этом со стороны глухого конца полость имеет две цилиндрические расточки 166 и 167, разделенные буртиком 168, при этом расточка 167 соединена с выходным каналом 162 пневмораспределителя, а расточка 167 соединена с одним из выходных каналов 170 устройства 1 и через него с одним из входных патрубков струйного двигателя 11. Внутри полости 165 расположен поршень 173, имеющий с одной стороны шток 174 с буртиком 175 и подпружиненный пружиной 176, связанной с регулировочным винтом 177, при этом диаметр поршня 173, буртика 175 и внутренний диаметр буртика 166 имеют одинаковый номинальный диаметр.
Устройство 1 снабжено внешней крышкой 180, установленной на панели 106 и снабженной двумя цилиндрическими отверстиями 182, 183, закрываемыми резьбовыми пробками, а также прозрачным глазком 184, установленным напротив индикаторной стрелки 108.
В другом варианте электропневматическое устройство 1 может быть выполнено с трехпозиционными пневмоцилиндрами, при этом толкатель каждого электромагнита соединен с одним из пневмораспределителей, например, толкатель 139 электромагнита 12 соединен подвижно с рычагом 190, который через регулировочный винт 191 и рычаг 192 соединен с толкателем 193, имеющим сквозной канал 194, и подпружиненный пружиной 195. В корпусе пневмораспределителя выполнено "седло" 196, на котором размещен клапан 197 со штырем 198, прижимаемый к седлу 196 пружиной 199. В корпусе пневмораспределителя установлен фильтр-осушитель 200, связанный каналами через седло 196 с полостью 202, состоящей из трех последовательно соединенных соосных цилиндров 207, 208, 209 с диаметрами соответственно, D1, D2, D3 причем соблюдается соотношение D1 > D3 > D2, при этом конец цилиндра 209 выполнен в виде кольцевого "седла" 210, а внутри цилиндров 207 и 208 размещены поршни 211, 212, жестко связанные между собой, при этом торец поршня 212 снабжен уплотняющим элементом 213, а в цилиндре 209 размещен поршень 214 со штоком 215, имеющий с одного конца, обращенного к поршню 212, кольцевое "седло" и осевой канал и боковые отверстия, связывающие через "седло" 216 полости цилиндров 208 и 209, а второй конец которого подвижно соединен с клапаном 217, подпружиненным пружиной 218; при этом входной канал 219 пневмораспределителя связан каналом 221 с фильтром-осушителем 200, а через седло 216 - с выходным каналом 224 пневмораспределителя, а через боковые отверстия и осевой канал с "седлом" 216 штока 215 соединен с выхлопным каналом 224, при этом канал 219 связан с входом устройства, например 6, а выхлопной канал 224 соединен каналом 226 с окружающей средой.
Пневматический привод, электропневматическое управляющее устройство работают совместно следующим образом.
При поступлении на электропневматическое управляющее устройство 1 управляющего электрического сигнала на поворот выходного вала 8 привода, например на электромагнит 2, последний срабатывает и своим толкателем 139 поворачивает рычаг 140, который через регулировочный винт 141 и рычаг 142 перемещает толкатель 143, который, соприкасаясь со штырем 148, перемещает клапан 147 от седла 146, при этом штырь 198 закрывает канал 144, а клапан 147 открывает проход рабочей среде от источника питания через каналы 160, 161, фильтр-осушитель 150, седло 146 в полость 151. Рабочая среда воздействует на поршень 156 и перемещая его и клапан 158, открывая доступ рабочей среде в канал 162 и далее в канал, например, 164 устройства 165 регулирования времени поворота выходного вала привода. Рабочая среда, газ или сжатый воздух, воздействует на торец буртика 175 и сжимает пружину 176 до тех пор, пока сила пружины и сила действия рабочей среды не сравняются. С ростом давления рабочей среды в 5 раз момент нагрузки на выходном валу 8 привода возрастает в 1,5 - 2,5 раза. Параметры устройства 6 выбираются таким образом, чтобы расход рабочей среды через устройство 6 с учетом характеристик струйного двигателя возрастал в той же пропорции.
Через канал 170 рабочая среда поступает в патрубок, например, 9 струйного двигателя 11 и далее по осевому каналу, например, 13 поступает через канал в плече к паре сопел, например, 15, 16 или, например, соплу 81; вытекая из сопел, рабочая среда создает реактивную силу и движущий момент на валу 19, который через зубчатый венец 20 и далее, через шестеренную передачу, на шестерню 51 и через шлицевую передачу на вал-шестерню 52 и далее на шестерню 26, которая имеет с одной стороны кулачки с наклонными боковыми гранями, входящими с люфтом в зацепление с ответными кулачками полумуфты 30, и далее, через шлицевое соединение, на шестерню 26, и затем через шлицевое соединение на выходной вал 27 редуктора 21 и далее через шлицевое соединение на входной элемент 28 - ходовой винт в случае кулисно-винтовой и реечно-секторной передачи или червяк в случае червячной переддачи. Вследствие наличия люфта в кулачковом зацеплении шестерни 26 и полумуфты 30, в начале движения ротор 12 движется без нагрузки, быстро разгоняется и набирает запас кинетической энергии, которая при выборе люфта в соединении кулачков создает дополнительный движущий момент, помогающий "страгивать" с места объект регулирования 70. При вращении ходового винта 28 закрепленная на нем ходовая гайка 65 перемещается вдоль его оси и через поводок 66 и ползунки 67 поворачивает кулису 69 вместе с выходным валом 8 привода и соединенным с ним объектом управления 70 - пробкой шарового или пробкового крана или поворотной заслонкой, одновременно поворачивая связанный с выходным валом 8 валик 71 электропневматического управляющего устройства 1, с индикаторной стрелкой 108 и платформой 109 с постоянными магнитами 114, 115.
При достижении выходным валом 8 нового крайнего положения один из постоянных магнитов, например 114, воздействуя на геркон 124, размыкает цепь электромагнита 2. В результате под действием пружины 145 толкатель 143 перемещается в исходное положение, а клапан 147 под действием пружины 149 садится на седло 146, при этом открывается канал 144, который соединяет полость 151 с внешней средой, в результате чего сжатая рабочая среда из полости 151 вытекает, усилие на поршень 156 падает и клапан 158 подл действием пружины 159 перемещает шток 154 в исходное положение и садится на "седло" 153, перекрывая доступ рабочей среде в двигатель 11, который перестает создавать движущийся момент, однако за счет накопленной во время движения кинетической энергии ротор 12 струйного двигателя 11 и другие подвижные части привода продолжают движение. При посадке кулисы на механической концевой упор (не обозначен), кулиса 69, выходной вал 8, поводок 66, ходовая гайка 65 останавливаются, а ходовой винт 28 за счет кинетической энергии подвижных частей продолжает вращаться и ввинчивается в гайку 65, перемещаясь вдоль своей оси, например вправо, и через подшипник 74 сжимает пружины 76, которые при этом поглощают кинетическую энергию подвижных частей, и когда вся эта энергия будет поглощена, подвижные части останавливаются, при этом пружины 76 остаются сжатыми.
Для поворота выхлопного вала 8 привода в обратную сторону управляющее напряжение подается на электромагнит 3, который открывает пневмораспределитель 5, при этом рабочая среда от источника поступает в устройство 7 и далее во входной патрубок 9 струйного двигателя 11, при этом ротор 12 вращается в противоположную сторону: при достижении валом 8 нового крайнего положения размыкаются контакты соответствующего геркона, подача рабочей среды в двигатель прекращается и привод останавливается.
В экстремальных ситуациях, например при резком снижении нагрузки на выходном валу 8 привода или росте входного давления при превышении допустимого движущего момента привода, ходовой винт перемещается вдоль оси, например вправо, на величину больше нормально допустимой, в результате под действием пружины 40 механизма 37 поворота постоянных магнитов устройства 25 ограничения максимальной величины передаваемого движущего момента поводок 33 поворачивается на оси 36 против часовой стрелки и регулировочным винтом 34 через рыча 42 поворачивает держатель 41 с постоянными магнитами 38, 39, при этом постоянный магнит 39 приближается к геркону 48 и своим полем размыкает контакты геркона и разрывает цепь включенного в данный момент электромагнита, например 2, пневмораспределителя 4, в результате чего пневмораспределитель перекрывает подачу рабочей среды в струйный двигатель 11. Если по какой-либо причине кинетическая энергия подвижных частей не будет полностью поглощена устройством 72 или движущий момент ротора превысит максимально допустимую расчетную величину, то полумуфта 30, благодаря наклонным боковым поверхностям кулачков, сожмет пружину 31 и обеспечит свободное проворачивание шестерни 26 на валу 27, предотвращая тем самым передачу на ходовой винт или червяк движущего момента выше допустимого.
При втором варианте устройства перемещения постоянных магнитов в исходном положении поводок 95 с магнитом 97 находится на упоре 101, и геркон 47 разомкнут, а держатель 96 с магнитом 98 - на упоре 104, и геркон 48 замкнут. При перемещении ходового винта, например вправо, поводок 90 под действием толкателя 32 поворачивается по часовой стрелке на оси 91, в результате чего ось 93 и 94 проходят через точки в пространстве, лежащие, соответственно, на прямых, соединяющих ось 91 и ось постоянных магнитов 97, 98, при дальнейшем движении поводка 90 пружина 99 перебрасывает держатель 95 на упор 103, а пружина 100 перебрасывает держатель 96 на упор 102, в результате чего геркон 47 замыкается, а геркон 48 размыкается, и пневмораспределитель, через который поступает в данный момент рабочая среда в двигатель закрывается. При движении ходового винта 28 и толкателя 32 в противоположную сторону поводок 90 поворачивается вокруг оси 91 за счет воздействия пружины 92, и переброс держателей и магнитов и переключение герконов происходит аналогичным образом.
Работа ручного дублера 22 происходит следующим образом. При повороте рукоятки 58 кулачки 56 и 57 перемещают муфту 54, выводя ее кулачки из зацепления с кулачками полумуфты 53 шестерни 51, выводя шестерню 51 из жесткой связи с валом-шестерней 52 и выходным валом 8. При этом защелка 64 заходит за буртик муфты 54 и удерживает ее в зацеплении с валом 60. При повороте штурвала 24 движение передается через вал-шестерню 52 и далее через шестерню 26, поворотный механизм 29 на выходной вал 8.
При случайной подаче рабочей среды в двигатель 11 благодаря возможности шестерни 51 свободно вращаться на валу 52 движение ротора струйного двигателя не передается на входной вал и штурвал 24.
Для отключения штурвала 24 нажатием на наружный конец штока двойного поршня 63 поворачивается защелка 64 и под действием пружины 55 муфта 54 перемещается, выходя из зацепления с кулачками вала 60 и входя в зацепление с кулачками шестерни 51, вследствие чего разрывается механическая связь между штурвалом 24 и выходным валом 8 и восстанавливается механическая связь между ротором 12 струйного двигателя и выходным валом 8.
При подаче рабочей среды в струйный двигатель 11, она одновременно подается в один из цилиндров устройства 62 и, действуя на соответствующий поршень 63, перемещает ток и поворачивает защелку 64, в результате чего муфта 54 перемещается, как и в случае поворота защелки 64, вручную, и далее происходит соединение механической связи ротор 12 - выходной вал 8.
Теоретические расчеты и большой объем экспериментальных исследований и испытаний нескольких типоразмеров и модификаций приводов, проведенных на экспериментальных полигонах и газораспределительных станциях РАО "Газпром" в течение 1987-1997 гг. и оформленных соответствующими протоколами, актами и решениями приемочных комиссий "Минхиммаша" СССР и РАО "Газпром", подтверждают правомочность и эффективность предлагаемых схемных, конструктивных, а параметрических решений для приводов шаровых кранов диаметром Dy100 - Dy1200 и диапазона давления рабочей среды Py = 1,5 - 12,5.
Источники информации:
1. А. Ф. Гуревич, О.Н.Заринский, Ю.К.Кузьмин Справочник по арматуре для газо- и нефтепроводов., Ленинград: "Недра", 1988 г. стр. 464.
2. Патент Российской Федерации N 2050478 кл. F 15 B 9/03 1994 г.

Привод предназначен для дистанционных систем управления запорно-регулирующей арматурой газо-, нефте- и продуктопроводов. Привод содержит электропневматическое управляющее устройство, пневматический струйный двигатель, редуктор, ручной дублер, поворотный механизм, снабженный устройствами регулирования времени поворота выходного вала привода в функции от изменения давления рабочей среды и нагрузки на объекте регулирования, устройством ограничения максимальной величины передаваемого движущего момента и связанным с ним устройством поглощения кинематической энергии подвижных частей привода. Струйный двигатель выполнен с системой направленного отвода рабочей среды, сменными дросселирующими элементами и соплами, а редуктор обеспечивает возможность изменения передаточного числа. Электропневматическое управляющее устройство выполнено в одном блоке, включающем в себя устройство регулирования времени поворота выходного вала привода, устройства конечных выключателей, при этом электромагниты и герконы размещены в одной взрывозащищенной камере и, в двух вариантах, двух- и трехпозиционные пневмораспределители. Расширение функциональных возможностей устройства. 2 с. и 16 з.п. ф-лы, 19 ил.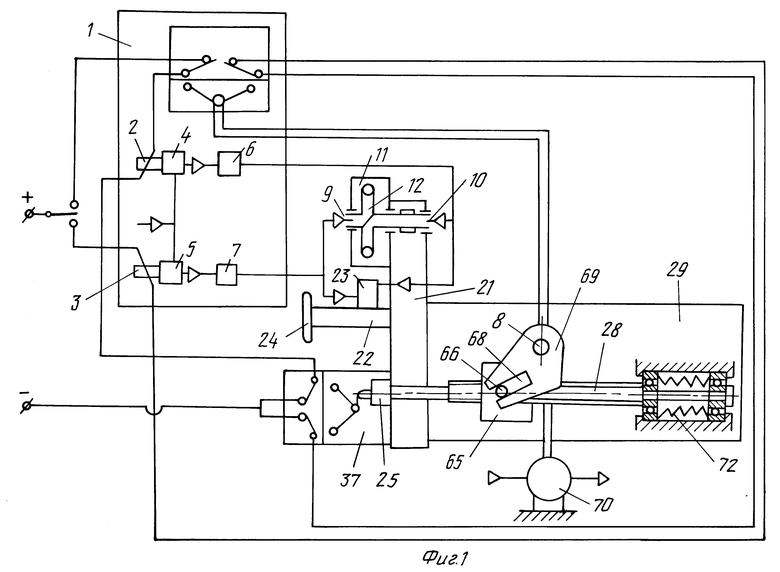
где J - момент инерции подвижных частей привода, приведенный к оси ходового винта;
ω - максимальная расчетная окружная скорость винта;
C - жесткость пружины;
х0 - начальное поджатие пружин;
х - максимальное расчетное поджатие пружин.
где D1 - диаметр 1-го цилиндра;
dc - диаметр седла.

