Изобретение относится к системам идентификации подвижных транспортных средств при их прохождении через автоматический пункт считывания информации для оперативного слежения за их дислокацией и контроля сохранности перевозимого груза в вагонах, контейнерах и других подвижных единицах, на противоположные стороны которых установлены кодовые бортовые датчики (КБД) и электронные метки запорно-пломбировочных устройств (ЭМ ЗПУ).
Известна железнодорожная система считывания информации с движущегося поезда (патент GB 2188464 ), в которой вдоль пути на определенном расстоянии друг от друга расположены считывающие устройства, которые формируют и принимают кодированную информацию по радиоканалу от ЭМ, расположенной на поезде.
Известна система дистанционного считывания информации для подвижного состава (патент РФ 2063895), включающая электронную метку с передающей антенной, передающую закодированную информацию на стационарный пункт опроса по радиоканалу, где сигнал детектируется и предается для дальнейшей обработки.
Известна автоматизированная система детектирования подвижного состава (патент США 6220552), реагирующая на сигнал от электронной метки, включающая генератор импульсов тока, детектор для определения величины и полярности упомянутых импульсов тока, логические элементы и т.д.
Недостатком указанных систем являются ограниченные функциональные возможности из-за невозможности осуществлять контроль за КБД и ЭМ ЗПУ, расположенных с двух сторон вагонов или контейнеров в процессе их перемещения по двухпутному участку железной дороги.
Техническим результатом изобретения является повышение достоверности считывания информации с КБД и ЭМ ЗПУ, расположенных с обеих сторон вагонов и контейнеров поезда, за счет исключения потери информации при одновременном встречном движении поездов по двухпутному участку железной дороги через автоматический пункт считывания информации.
Указанный технический результат достигается тем, что система автоматической идентификации контейнеров и подвижного состава железнодорожного транспорта, предназначенная для считывания идентификационных данных с обеих сторон подвижного состава на двухпутном участке железной дороги, содержит два расположенных на определенном расстоянии друг от друга взаимосвязанных автоматических пункта считывания (АПС), каждый из которых включает в себя напольное считывающее устройство (НСУ) и соединенные с ним по меньшей мере шесть приемопередающих антенных система (ППАС), причем каждый НСУ связан проводным каналом или радиоканалом с ПЭВМ диспетчерского пункта и соединен с четырьмя датчиками фиксации прохода осей, два из которых установлены на первом пути, а два других - на втором пути, при этом первая и вторая антенные системы расположены с внешней стороны первого пути, вторая и шестая - с внешней стороны второго пути, а третья и четвертая - над контактной сетью над первым и вторым путями соответственно.
В частных случаях выполнения предложенной системы считывания:
- расстояние между АПС выбрано из условия обеспечения невозможности одновременного нахождения двух составов в зоне расположения первого и второго АПС, например по условиям безопасности;
- НСУ размещены в путевых ящиках, установленных в междупутье двухпутного участка пути на равном удалении от первой и второй, пятой и шестой ППАС, расположенных на мачтах с внешней стороны первого и второго пути первого и второго АПС;
- для обеспечения считывания информации с электронных меток (ЭМ) запорно-пломбировочных устройств (ЗПУ) на загрузочных люках цистерн третья и четвертая ППАС установлены над первым и вторыми путями соответственно на консоли мачт, расположенных в внешней стороны первого и второго пути на уровне выше контактного провода;
- ППАС включает одну приемопередаюшую антенну или функционально самостоятельные приемную и передающую антенны;
- диаграмма направленности ППАС, расположенных с внешней стороны первого и второго путей, имеют угол раскрыва α в вертикальной плоскости не менее, чем от головки рельса до верхнего загрузочного люка цистерны для обеспечения попадания в диаграмму направленности сигналов от ЭМ ЗПУ и колесных пар и сигналов от кодовых бортовых датчиков (КБД) вагонов и локомотива;
- для обеспечения считывания информации с КБД контейнеров расположенные на мачтах с внешней стороны первого и второго пути ППАС имеют вертикальную поляризацию, при этом их диаграмма направленности обеспечивает перекрытие всей зоны возможного нахождения кодового бортового датчика при считывании с обеих сторон контейнера и имеют угол раскрыва γ и θ соответственно;
- ППАС, расположенные с внешней стороны первого и второго путей, выполнены с возможностью изменения их диаграммы направленности в вертикальной плоскости по команде от ПСУ на угол раскрыва β и на угол θ, меньшие чем угол α и угол γ соответственно при считывании информации с поезда, идущего по дальнему от ППАС пути;
- ППАС, расположенные с внешней стороны первого и второго путей, выполнены с возможностью изменения мощности радиоизлучения по команде от НСУ;
- ППАС, расположенные с внешней стороны первого и второго путей, имеют диаграммы направленности в горизонтальной плоскости с углом раскрыва, обеспечивающим на боковой стороне вагона идущего по ближнему пути поперечный размер радио пятна, обеспечивающий заданную разрешающую способность считывания;
- ППАС, расположенные с внешней стороны первого и второго путей выполнены с возможностью изменения их диаграммы направленности в горизонтальной плоскости по команде от ПСУ на угол раскрыва, обеспечивающий на боковой стороне вагона или контейнера, идущего по дальнему пути от соответствующей ППАС поперечный размер радио пятна, обеспечивающий заданную разрешающую способность считывания;
- ПЭВМ диспетчерского пункта выполнена с возможностью формирования информации о проследовавшей подвижной единице и идентификационных данных на основании информации от ПСУ, поступающей по сигналам датчиков прохода осей о моменте времени прохода осей подвижной единицы, и на основании базы данных обо всех типах подвижного состава, хранящейся в памяти ПЭВМ, и передачи в АСУ информации о наличии или отсутствии на подвижной единице КБД, ЭМ ЗПУ и колесных пар и информации о несанкционированном вскрытии ЗПУ;
- датчики фиксации прохода осей размещены на одном рельсе или на двух рельсах каждого пути на фиксированном расстоянии друг от друга для определения направления движения и мгновенной скорости поезда.
Под разрешающей способностью понимается минимально возможное расстояние между КБД и ЭМ ЗПУ.
Изобретение поясняется фиг. 1-5, на которых представлены различные варианты выполнения системы считывания.
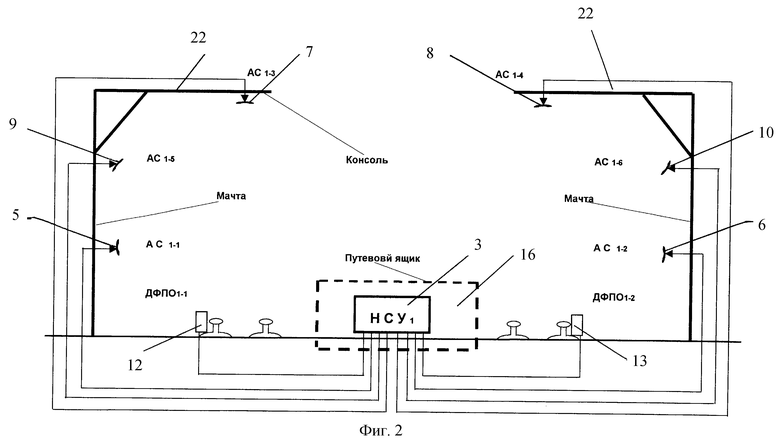
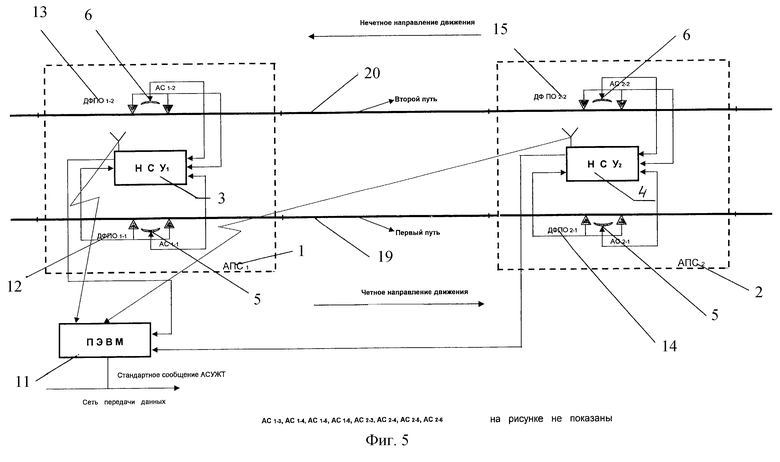
Система содержит два расположенных на определенном расстоянии друг от друга взаимосвязанных АПС 1 и 2, каждый из которых включает в себя ПСУ 3 и 4 и соединенные с ним по меньшей мере шесть приемопередающих антенных систем ППАС 5-10 и 51-101, причем каждый АПС 1 и 2 связан проводным каналом или радиоканалом с ПЭВМ 11 диспетчерского пункта и соединен с четырьмя датчиками 12-15 фиксации прохода осей, два 12 и 14 из которых установлены на первом пути, а два других 13 и 15 - на втором пути. Первая 5 и вторая 9 антенные системы расположены с внешней стороны первого пути, вторая 6 и шестая 10 - с внешней стороны второго пути, а третья 7 и четвертая 8 - над контактной сетью над первым и вторым путями соответственно.
Расстояние между АПС 1 и 2 выбрано из условия обеспечения невозможности одновременного нахождения двух составов в зоне расположения первого и второго АПС, например, по условиям безопасности.
НСУ 3 и 4 размещены в путевых ящиках 16 и 161, установленных в междупутье двухпутного участка пути на равном удалении от первой и второй, пятой и шестой ППАС (5, 6, 9, 10 и 51, 61, 91, 101), расположенных на мачтах 17 и 18 с внешней стороны первого 19 и второго 20 пути первого АПС 1 и второго АПС2.
Для обеспечения считывания информации с электронных меток 21 (ЭМ) запорно-пломбировочных устройств (ЗПУ) на загрузочных люках цистерн третья и четвертая ППАС установлены над первым и вторыми путями соответственно на консоли 22 мачт, расположенных в внешней стороны первого и второго пути на уровне выше контактного провода (не показан).
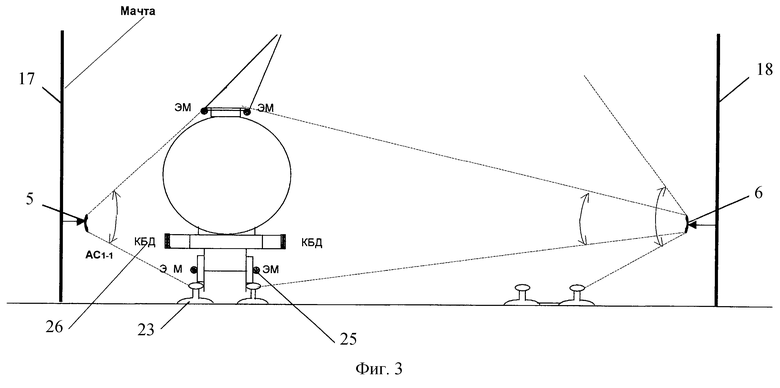
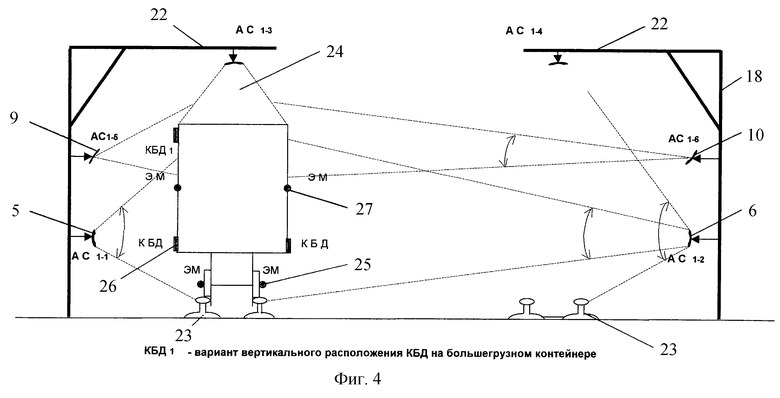
Диаграмма направленности ППАС 5, 6, 9, 10 и 51, 61, 91, 101 , расположенных с внешней стороны первого и второго путей, имеют угол раскрыва α в вертикальной плоскости не менее, чем от головки рельса 23 до верхнего загрузочного люка цистерны 24 для обеспечения попадания в диаграмму направленности сигналов от ЭМ ЗПУ 27 и колесных пар 25 и сигналов от кодовых бортовых датчиков 26 (КБД) вагонов и локомотива.
Для обеспечения считывания информации с КБД 26 контейнеров расположенные на мачтах с внешней стороны первого 19 и второго 20 пути ППАС 5, 6, 9, 10 и 51, 61, 91, 101 имеют вертикальную поляризацию, при этом их диаграмма направленности обеспечивает перекрытие всей зоны возможного нахождения кодового бортового датчика при считывании с обеих сторон контейнера и имеют угол раскрыва γ и θ соответственно.
ППАС 5, 6, 9, 10 и 51, 61, 91, 10,1 расположенные с внешней стороны первого 19 и второго 20 путей, выполнены с возможностью изменения их диаграммы направленности в вертикальной плоскости по команде от НСУ 3 или 4 на угол раскрыва β и на угол θ, меньшие чем угол α и угол γ соответственно при считывании информации с поезда, идущего по дальнему от ППАС пути.
ППАС 5, 6, 9, 10 и 51, 61, 91, 101, расположенные с внешней стороны первого и второго путей, выполнены с возможностью изменения мощности радиоизлучения по команде от НСУ.
ППАС 5, 6, 9, 10 и 51, 61, 91, 101, расположенные с внешней стороны первого и второго путей, имеют диаграммы направленности в горизонтальной плоскости с углом раскрыва, обеспечивающим на боковой стороне вагона идущего по ближнему пути поперечный размер радиопятна, обеспечивающий заданную разрешающую способность считывания.
ППАС 5, 6, 9, 10, расположенные с внешней стороны первого и второго путей, выполнены с возможностью изменения их диаграммы направленности в горизонтальной плоскости по команде от НСУ 3 на угол раскрыва, обеспечивающий на боковой стороне вагона или контейнера, идущего по дальнему пути от соответствующей ППАС, поперечный размер радиопятна, обеспечивающий заданную разрешающую способность считывания.
ПЭВМ 11 диспетчерского пункта выполнена с возможностью формирования информации о проследовавшей подвижной единице и идентификационных данных на основании информации от НСУ 3 и 4, поступающей по сигналам датчиков прохода осей 12-15 о моменте времени прохода осей подвижной единицы, и на основании базы данных - обо всех типах подвижного состава, хранящейся в памяти ПЭВМ, и передачи в АСУ информации о наличии или отсутствии на подвижной единице КБД, ЭМ ЗПУ и колесных пар и информации о несанкционированном вскрытии ЗПУ.
Датчики фиксации прохода осей 12-15 размещены на одном рельсе или на двух рельсах каждого пути на фиксированном расстоянии друг от друга для определения направления движения и мгновенной скорости поезда.
Система считывания работает следующим образом (см. фиг.5)
Предположим, что поезд движется по первому пути 19 в четном направлении. При вступлении поезда на ДФПО 12 на НСУ 3 поступает сигнал о его включении и приемопередающие антенные системы 6 и 5, 9 и 10, 7 и 8 начинают излучать зондирующие сигналы. При вступлении очередного вагона в зону действия антенн 5-10 происходит считывание информации с КБД 26 и ЭМ 27 ЗПУ с обеих сторон вагона (контейнера) и с загрузочного люка 24 цистерн и с ЭМ 25, установленных на колесных парах.
Если при этом за время считывания информации по второму пути 20 поезд не появился, то считывание информации с обеих сторон вагонов поезда будет успешно завершено.
Если во время считывания по второму пути появился встречный поезд, информация с обеих сторон которого была считана на АПС 2, то он перекроет действие ППАС 6 и 10 и информация со второй стороны первого поезда, движущегося в четном направлении не будет считана.
НСУ 3 передаст информацию об этом в ПЭВМ 11.
При вступлении первого поезда на ДФПО 14 включается НСУ 4 и его ППАС 61 и 51, 91 и 101, 71 и 81, и с помощью ППАС 61 и 101 произойдет считывание информации с противоположной стороны вагонов (контейнеров) первого поезда.
Считанная с НСУ 4 информация поступает в ПЭВМ 11, где происходит объединение информации о поезде (стандартное сообщение в системе АСУ ЖТ), которое по сети передачи данных поступает в центр ведения базы данных.
Макет будет содержать по каждому вагону информацию о его номере, о номерах электронных меток ЗПУ, установленных с обеих сторон вагона, и о состоянии ЗПУ (вскрыть/не вскрыто).
ПЭВМ 11 по сигналу от НСУ 3 и 4 получает информацию о временных отметках прохода осей очередной подвижной единицы по сигналам от датчиков фиксации осей 12-15 и на основании имеющейся в ее памяти базы данных о расстояниях между осями колесных пар всех типов подвижного состава формирует информацию о проходе очередной подвижной единице и определяет наличие (отсутствие) на ней КБД или ЭМ.
За счет того, что на АПС 2 происходит считывание информации, уже считанной в АПС 1, то путем сравнения этой информации можно значительно повысить достоверность системы считывания.
Поскольку КБД, содержащие одинаковую информацию о номере вагона будут считаны ППАС 5 в АПС 1 и АПС 2, то сравнение этой информации позволит значительно повысить достоверность о номере вагона.
Аналогичным способом будет осуществляться считывание информации с поезда, идущего по второму пути нечетного направления, а именно: она будет считана на АПС 2 (при отсутствии в момент считывания поезда, идущего по четному направлению) или сначала на АПС 2 с одной стороны при помощи ее ППАС, а с другой стороны при помощи ППАС, установленных АПС 1.
Предложенная система за счет считывания идентификационных данных с двух автоматических пунктах считывания обеспечивает увеличение достоверности считывания данных. Достоверность считывания Добщ предлагаемой системы определяется по формуле
Добщ = 1-(1-Д)4,
где Д - достоверность считывания идентификационных данных за один эпизод считывания с учетом влияния факторов вандализма и возможностью нахождения затеняющих объектов в зоне размещения АПС в момент времени, когда производится считывание.
Изобретение относится к системам идентификации подвижных транспортных средств при их прохождении через автоматический пункт считывания информации. Система содержит два взаимосвязанных автоматических пункта считывания (АПС), каждый из которых включает в себя напольное считывающее устройство и соединенные с ним по меньшей мере шесть приемопередающих антенных система. Каждый АПС связан проводным каналом или радиоканалом с ПЭВМ диспетчерского пункта и соединен с датчиками фиксации прохода осей, два из которых установлены на первом пути, а два других - на втором пути. Первая и пятая антенные системы расположены с внешней стороны первого пути, вторая и шестая - с внешней стороны второго пути, а третья и четвертая - над контактной сетью над первым и вторым путями соответственно. Расстояние между АПС выбрано из условия обеспечения невозможности одновременного нахождения двух составов в зоне АПС. Техническим результатом изобретения является повышение достоверности считывания информации с КБД и ЭМ ЗПУ, расположенных с обеих сторон вагонов и контейнеров поезда, за счет исключения потери информации при одновременном встречном движении поездов по двухпутному участку железной дороги через автоматический пункт считывания информации. 11 з.п.ф-лы, 5 ил.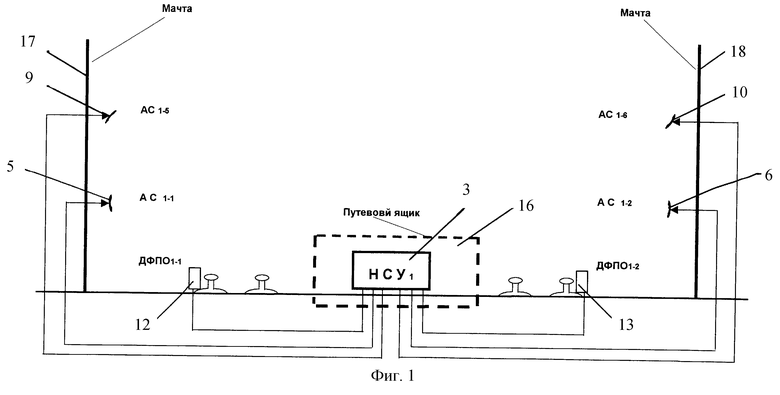
| US 6220552 A, 24.04.2001 | |||
| НОСИТЕЛЬ ДАННЫХ ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1994 |
|
RU2137161C1 |
| US 6061614 A1, 09.05.2000 | |||
| СПОСОБ ОЦЕНКИ СТЕПЕНИ РИСКА РАЗВИТИЯ ДИСФУНКЦИИ МАЛЫХ ДЫХАТЕЛЬНЫХ ПУТЕЙ У ПАЦИЕНТОВ С БРОНХИАЛЬНОЙ АСТМОЙ НА РАННИХ СТАДИЯХ | 2020 |
|
RU2741858C1 |
| US 6176475 A1, 23.01.2001 | |||
| US 5022174 A, 11.06.1991 | |||
| НОСИТЕЛЬ ДАННЫХ ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1994 |
|
RU2137161C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ УСТРОЙСТВ ДЛЯ ХРАНЕНИЯ ИНФОРМАЦИИ (ВАРИАНТЫ) | 1996 |
|
RU2188464C2 |

