Изобретение относится к техническим средствам охраны и может быть использовано для определения азимута на обнаруженный объект и его классификации при охране протяженных участков местности, территорий и подступов к объектам.
Известны способы разнесенной акустической пассивной локации для определения азимута на обнаруживаемые объекты, реализованные в корреляторе [1], где основным информационным признаком для определения направления на объект является функция взаимной корреляции двух сигналов, а также устройства для классификации обнаруживаемых объектов, которые реализованы в устройстве распознавания сейсмических сигналов [2] и сейсмическом устройстве обнаружения и классификации объектов [3].
Наиболее близким к предлагаемому является многоканальный корреляционный измеритель разности временных запаздываний (фиг.1) [1]. В каждом из его каналов реализуется взаимокорреляционная обработка, рассчитанная на определенное значение задержки сигнала.
Структурная схема многоканального корреляционного измерителя разности временных запаздываний включает линию задержки канала первого сигнала y1(t), линию задержки с отводами капала второго сигнала у2(t), корреляторы Х1, Х2, . . . , Хn и решающее устройство. По двум каналам поступают сигналы у1(t) и у2(t), сформированные одинаковыми, разнесенными в пространстве, чувствительными сейсмическими элементами. Характер сигналов определяется классом обнаруженного объекта. Первый сигнал условно принят опорным и поступает на первые входы перемножителей всех корреляторов. Второй сигнал с различным временем задержки поступает на вторые входы всех корреляторов. На выходах корреляторов формируется взаимная корреляционная функция двух сигналов. Максимум значения взаимной корреляционной функции формируется на выходе того коррелятора, на вход которого поступает сигнал, задержанный на время запаздывания вступления фронта волны в один сейсмоприемник относительно другого сейсмоприемника, то есть выполняется условие компенсации разности хода волны. Время задержки сигнала находится в зависимости от направления на объекте и, следовательно, позволяет оценить азимут на объект.
Недостатком таких устройств является невозможность получения дополнительной информации о принадлежности пеленгуемого объекта к определенному классу объектов и невозможность пространственной селекции сигналов на фоне помех.
Предлагаемое устройство обеспечивает повышение информативности сейсмических средств обнаружения а также пространственную селекцию сигналов на фоне помех.
Для этого в многоканальный корреляционный измеритель разности временных запаздываний внесены изменения, касающиеся схемы обработки сигналов: селектор максимального сигнала и классификатор (фиг.2).
Сейсмические волны принимаются двумя разнесенными в пространстве на некоторое расстояние L сейсмоприемниками с усилителями, где L - сейсмическая база приема сейсмоколебаний (фиг.2). Сейсмоприемники и усилители - идентичны.
Расстояния, пройденные сейсмоволнами от источников сейсмоколебаний до сейсмоприемников, не одинаковы, а следовательно, различаются фазой принимаемого сигнала. Запаздывание одного из сигналов зависит от положения источника сейсмоволн относительно сейсмоприемников и расстояния L (сейсмической базы).
Скорость распространения сейсмоволн в зависимости от типа грунта составляет 400...1000 м/с [4], следовательно, существует возможность расчета времени запаздывания прихода волны.
Так как сигнал в обоих каналах одинаков, а микросейсмы и некоторые виды помех (шум дождя, шелест травы, и др.) в каналах независимы, в каждом канале будут присутствовать колебания вида у1(t) и у2(t).
у1(t)=S(t)+n1(t), (1)
y2(t)=S(t)+n2(t), (2)
где y1(t) и у2(t) - входные колебания в первом и во втором каналах, представляющие собой аддитивную смесь сигнала S(t) и шума n1(t) и n2(t) в каждом канале.
В корреляторах сигналы перемножаются, причем сигналы помех взаимно подавляются.
Реализация функции взаимной корреляции сигналов от одного источника в двух независимых каналах принимает максимальные значения в случае компенсации времени запаздывания сигнала в одном из каналов за счет включения линии задержки. Количество корреляторов, равное n, определено удобством применения n линий задержки с фиксированным временем задержки. Количество корреляторов определяется требуемой точностью определения азимута па объект.
В общем случае, необходимо обеспечить суммарную задержку сигнала в диапазоне от -Δt до Δt с помощью n линий задержки. Временной интервал Δt определяется:
где L - сейсмическая база,
U - скорость распространения сейсмических волн.
Наличие одновременно на выходах нескольких корреляторов локальных максимумов взаимной корреляционной функции соответствует ситуации, когда на рубеже присутствует несколько объектов. По данному признаку оценивается количество объектов в контролируемой зоне.
Диаграмма направленности корреляционного пеленгатора с двумя сейсмоприемниками представляет собой "восьмерку" [5]. Ширина диаграммы направленности зависит от значения L (сейсмической базы), рабочей длины волны коррелятора, средней частоты спектра сейсмосигнала и ширины спектра сейсмосигнала. Данные параметры выбираются исходя из требований, предъявляемых к пеленгатору.
Взаимная корреляционная функция сигнала от объекта обнаружения, принятого двумя идентичными каналами, и сформированная коррелятором (фиг.2), представляет собой ничто иное, как автокорреляционную функцию, но с различным временем задержки сигнала.
На выходах всех перемножителей сигналов корреляторов будут присутствовать сигналы, полученные в результате перемножения входных сигналов. Сигнал, возведенный во вторую степень, будет наблюдаться на выходе того перемножителя, на второй вход которого поступает сигнал, задержанный на время запаздывания прихода сейсмоволны. Следовательно, сигнал на выходе перемножителя будет содержать полную информацию о классе пеленгуемого объекта, что позволяет производить дальнейшую классификацию по какому-либо признаку (полоса частот, характер поведения функции сигнала, ...).
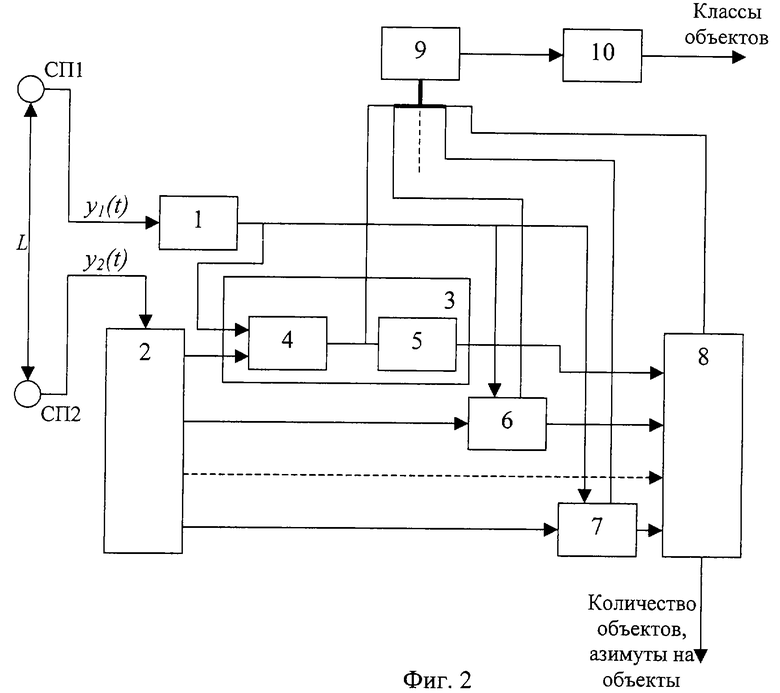
Работа устройства реализуется следующим образом (фиг.2). В исходном состоянии производится прием сейсмических сигналов двумя разнесенными в пространстве сейсмоприемниками. Сейсмосигналы поступают на два канала обработки. Первый канал, включающий каскады предварительной обработки и одну линию задержки 1, условно принят опорным. Второй канал включает набор линий задержки 2 и столько же корреляторов, состоящих из перемножителя 4 и интегратора 5 каждый. Сигналы на выходах всех корреляторов сравниваются решающим устройством 8. Если сигналы, формируемые на выходах всех корреляторов, одинаковы или незначительно отличаются, то решение об азимуте на объект не принимается, а селектор максимального сигнала 9 и классификатор 10 в работе не участвуют. Это соответствует ситуации, когда в зоне обнаружения отсутствует объект или присутствует рассредоточенная в пространстве помеха.
В случае появления объекта в зоне обнаружения на выходах корреляторов сигналы будут не одинаковы. Решающее устройство 8 по критерию максимума взаимной корреляционной функции на выходах корреляторов принимается решение об азимуте на обнаруженный объект. Решающее устройство 8 определяет коррелятор с максимальным выходным сигналом, формирует команду для селектора максимального сигнала 9 о подключении выхода перемножителя 4 этого коррелятора к классификатору 10. Классификатор 10 принимает решение о предполагаемом классе обнаруженного объекта. Переключение выходов корреляторов селектором максимального сигнала 9 означает управление диаграммой направленности пеленгатора. В случае наличия нескольких объектов на охраняемом рубеже могут наблюдаться максимумы на выходах нескольких корреляторов. Поочередная коммутация селектором максимального сигнала 9 выходов корреляторов к классификатору 8 позволяет последовательно классифицировать обнаруженные объекты. Возможен подсчет числа объектов на охраняемом рубеже в том случае, если объекты находятся друг от друга на таком расстоянии, которое позволяет их фиксировать раздельно, т.е. в случае узкой диаграммы направленности, при которой система сейсмодатчиков обладает разрешением по азимуту.
Предлагаемый сейсмический корреляционный пеленгатор объектов позволяет повысить информативность сейсмических средств обнаружения за счет возможности определения азимута на объекты, подсчета количества объектов и их раздельной классификации. Используемый метод пространственной селекции повышает помехоустойчивость средства обнаружения.
Источники информации
1. Радиоэлектронные системы: основы построения и теория. Справочник/ Ширман Я. Д. , Лосев Ю.И., Минервин Н.Н. и др./ Под ред. Я.Д. Ширмана - М.: ЗАО "МАКВИС", 1998. 828 с: ил., библ. 539 назв.
2. SU 1832954 7 G 01 V 1/28, Шарамонов Е.Е., Соколов И.В., Матвеев В.С., Лисицин С.В. Устройство распознавания сейсмических сигналов.
3. RU 2040807 6, G 08 B 13/00. Хорев Петр Федорович, Мащенко Владимир Алексеевич, Сироткин Константии Николаевич, Щитов Владимир Петрович, Лебедев Денис Михаилович. Сейсмическое устройство обнаружения и классификации объектов.
4. Гурвич И.И., Боганник Г.Н. Сейсмическая разведка: Учебник для вузов. -3-е изд., перераб. - М.: Недра, 1980. - 551 с.
5. Биншток В.Б. Измерение угловых координат и пассивная радиолокация -М. : ВЗЭИС, 1967.-104 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2004 |
|
RU2273867C1 |
| СЕЙСМИЧЕСКИЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2010 |
|
RU2442190C1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ СЕЙСМИЧЕСКОЙ ПЕЛЕНГАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2410751C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2000 |
|
RU2175772C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| СЕЙСМИЧЕСКИЙ ЛОКАТОР НАЗЕМНЫХ ОБЪЕКТОВ | 2013 |
|
RU2536087C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ НА ОХРАНЯЕМОМ РУБЕЖЕ | 2000 |
|
RU2165629C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2003 |
|
RU2236027C1 |
| СПОСОБ ПРИВЯЗКИ И АДАПТАЦИИ СЕЙСМОДАТЧИКОВ К МЕСТНОСТИ | 2002 |
|
RU2202810C1 |
Изобретение относится к техническим средствам охраны и может быть использовано для определения азимута на обнаруживаемые объекты на охраняемом рубеже, подсчета количества объектов в групповой цели и классификации обнаруженных объектов. Сейсмический корреляционный пеленгатор объектов для реализации функции пеленгования использует способ разнесенной пассивной локации, основным информационным признаком для определения направления на объект является функция взаимной корреляции сигналов в двух каналах обработки сигналов. По величине задержки сигнала принимается решение о величине азимута на объект, а измерение величины задержки сигнала эквивалентно управлению диаграммой направленности сейсмической антенной системы. Достигаемым техническим результатом изобретения является повышение информативности сейсмических средств обнаружения, а также пространственная селекция сигналов на фоне помех. 2 ил.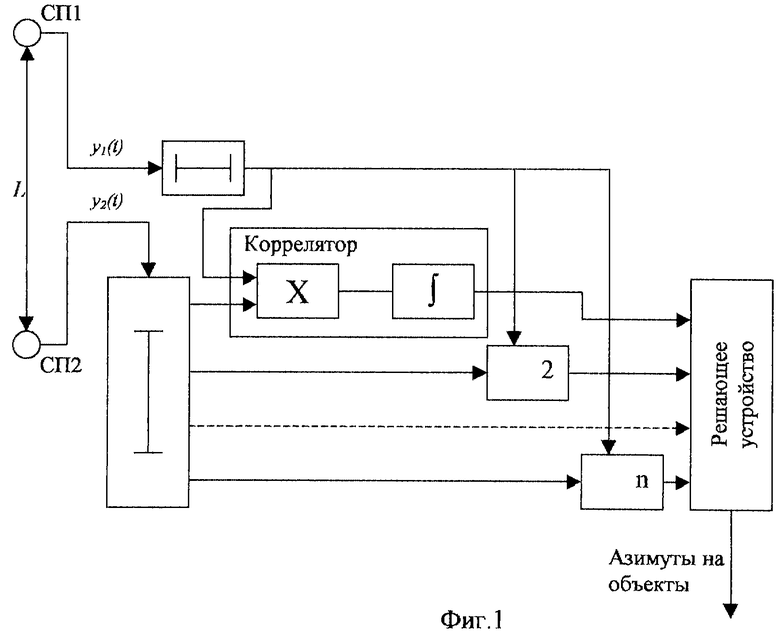
Сейсмический корреляционный пеленгатор объектов, в котором производится прием сейсмических сигналов двумя разнесенными в пространстве сейсмоприемниками, при этом сейсмосигналы поступают на два канала обработки - первый канал обработки сейсмических сигналов, включающий линию задержки, второй канал обработки сейсмических сигналов, включающий набор линий задержки с различным временем задержки и корреляторы по количеству линий задержки, на первый вход каждого коррелятора поступает сигнал с выхода линии задержки первого канала обработки сейсмического сигнала, на второй вход каждого коррелятора поступает сигнал с выхода линии задержки с определенным временем задержки, выходы корреляторов соединены с входами решающего устройства, отличающийся тем, что дополнительно введен селектор максимального сигнала и классификатор, входы селектора максимального сигнала соединены с выходами перемножителей корреляторов, выход селектора максимального сигнала соединен со входом классификатора, выход решающего устройства соединен с управляющим входом селектора максимального сигнала.
| ШИРМАН Я.Д | |||
| и др | |||
| Радиоэлектронные системы: основы построения и теория | |||
| Справочник | |||
| - М.: ЗАО "МАКВИС", 1998, с | |||
| ПРИСПОСОБЛЕНИЕ К КОСЕ ДЛЯ КОСЬБЫ ДВУМЯ РУКАМИ (ОКОСЬЕ) | 1921 |
|
SU565A1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ | 1993 |
|
RU2040807C1 |
| 0 |
|
SU161508A1 | |
| US 3696369, 03.10.1972 | |||
| US 6088295, 11.07.2000. | |||

