Изобретение относится к техническим средствам исследования физических свойств грунтов и может быть использовано для определения координат мест установки сейсмических датчиков с адаптацией к свойствам грунта в месте установки датчика.
Известны способы привязки объектов на местности, используемые в геодезии, топографии и строительстве.
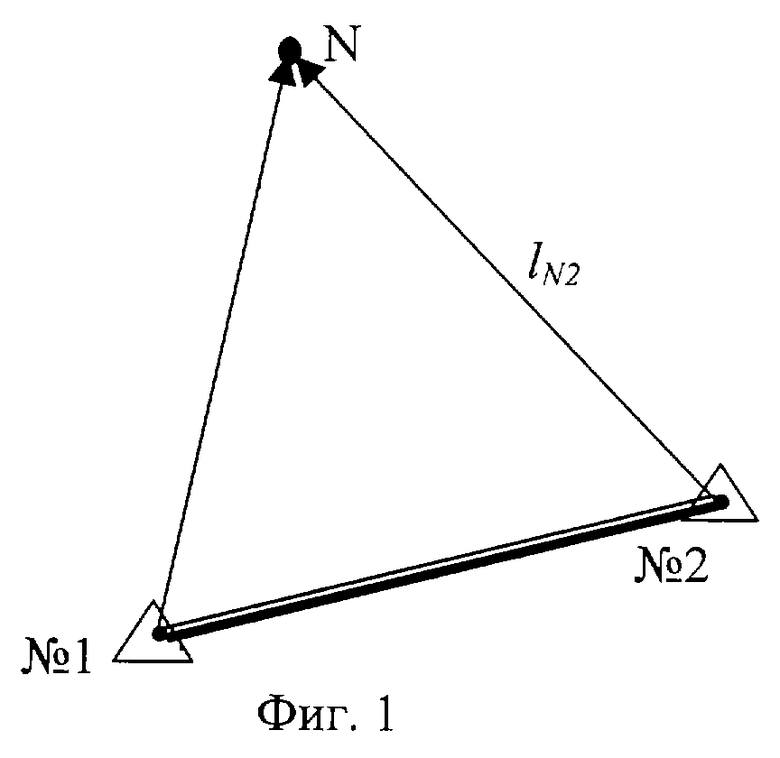
Первый способ /1, 2/. Прямые и обратные засечки (линейные, угловые, азимутальные). Производится по двум ориентирам ( 1, 2) с заранее известными координатами (Х1, Y1) и (X2, Y2). Прямые засечки измерений производятся от ориентиров, а обратные засечки производятся от фиксируемой точки:
- линейные засечки - измеряется расстояние от ориентиров ( 1, 2) до фиксируемой точки N (при прямой засечке) и от точки N до ориентиров (при обратной) (фиг.1);
- угловые засечки (применяется только при прямой засечке) - измеряются внутренние углы между направлениями, проходящими через ориентиры и фиксируемую точку N (фиг.2);
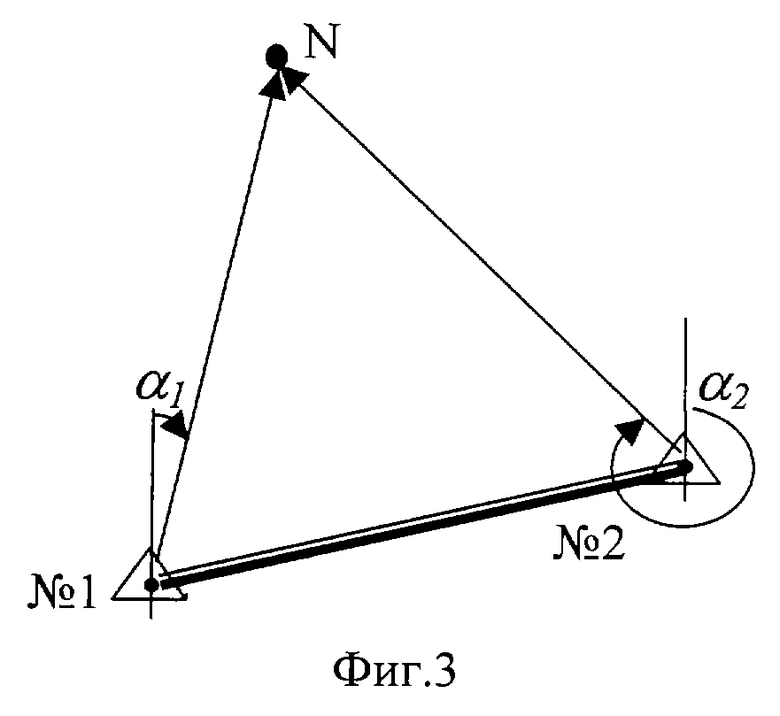
- азимутальные засечки - измеряются дирекционные углы направлений, проходящих через ориентиры и фиксируемую точку N (фиг.3).
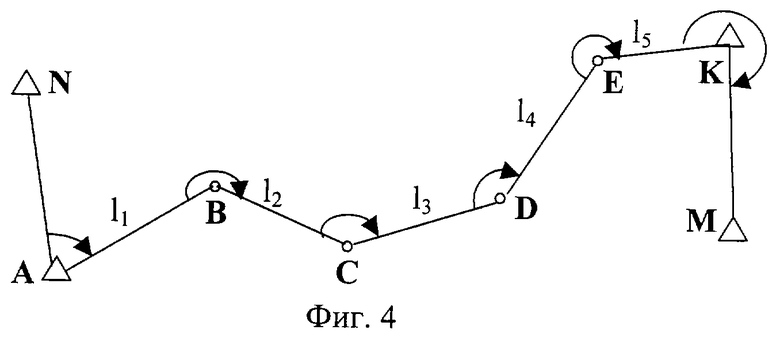
Второй способ - способ полигонометрических ходов (фиг.4) /2/. Применяется при отсутствии ориентиров в пределах прямой видимости от места установки с опорой на 1-2 исходных пункта (ориентира). Полигонометрические ходы могут быть линейными, угловыми азимутальными и азимутально-линейными.
Третий способ - комбинированный. Применяется с опорой на один исходный пункт (ориентир), находящийся вне пределов прямой видимости от места установки объекта. Он осуществляется путем построения азимутально-линейного звена.
Четвертый способ - применяется в строительстве при выполнении рабочих чертежей, который выполняют на инженерно-топографическом плане /3/. На этом плане наносят и указывают строительную геодезическую сетку или заменяющий ее разбивочный базис. Для жилищно-гражданских объектов, кроме того, - городскую геодезическую сетку, которая должна перекрывать весь план. Контуры проектируемых зданий и сооружений наносят на план по архитектурно-строительным рабочим чертежам, принимая координационные оси зданий и сооружений совмещенными с внутренними гранями стен. Разбивочный план выполняют с координатной и размерной привязкой. Строительную геодезическую сетку наносят на весь разбивочный план в виде квадратов со сторонами 10 см. Начало координат принимают в нижнем левом углу листа. Размерную привязку осуществляют от разбивочного базиса. Разбивочным базисом может быть любая прямая линия, проходящая через две закрепленные на местности точки, которые обозначают прописными буквами русского алфавита.
Наиболее близким к предлагаемому способу является способ прямых линейных засечек по двум ориентирам /1, 2/, который позволяет находить координаты неизвестной точки по координатам двух известных точек и расстоянию от этих точек до искомой. В этом способе выбираются две точки с заранее известными координатами; из этих точек с помощью дальномера или шагами измеряется расстояние до точки с неизвестными координатами; используя несложные формулы, производят необходимые вычисления для нахождения координат точки. Этот способ реализуется следующим образом (фиг.5).
Определяются две точки с координатами: 1 (Y1, X1) и 2 (Y2, Х2). Из этих точек измеряется расстояние ln1 и lN2 до точки N, координаты которой необходимо вычислить. По формуле (1) определяется угол наклона направления γ, проходящего через ориентиры 1 и 2 к горизонтальной линии координатной сетки Y
По формуле (2) находится расстояние между точками 1 и 2
Используя теорему косинусов, по формуле (3) находится дирекционный угол α1
где l12 - расстояние между точками 1 и 2, м;
l1N - расстояние между точкой 1 и точкой N, м;
l2N - расстояние между точкой 2 и точкой N, м.
Опираясь на ранее проведенные расчеты, по формуле (4) рассчитываются координаты точки N
Указанные способы имеют ряд недостатков:
- для определения расстояния на местности от точки с известными координатами до точки, координаты которой необходимо найти, необходим визуальный контакт с этой точкой;
- при необходимости найти координаты нескольких точек эта процедура занимает значительный интервал времени;
- при определении координат большой группы сейсмодатчиков, установленных дистанционным способом на местности, для создания единого сейсмического информационного поля вышеперечисленные методы неприемлемы, так как определить визуально место установки датчика невозможно.
Предлагаемым изобретением решается задача определения расстояния от точки с известными координатами до точки с неизвестными координатами с помощью звуковой волны.
Для быстрой привязки сейсмодатчиков к топографической системе координат и их адаптации к свойствам грунта целесообразно использовать два подрыва зарядов взрывчатого вещества (100-150 г) с последующей фиксацией времени прихода сейсмической и акустической волн. В основу способа положен факт изменения скорости распространения звука в различных средах в зависимости от их плотности /5/. В то же время на сейсмоприемник, установленный на местности вблизи поверхности грунта, воздействуют две составляющие взрывного воздействия: сейсмическая волна и акустическая волна (фиг.7 и 8).
Сущность изобретения поясняется чертежами, где:
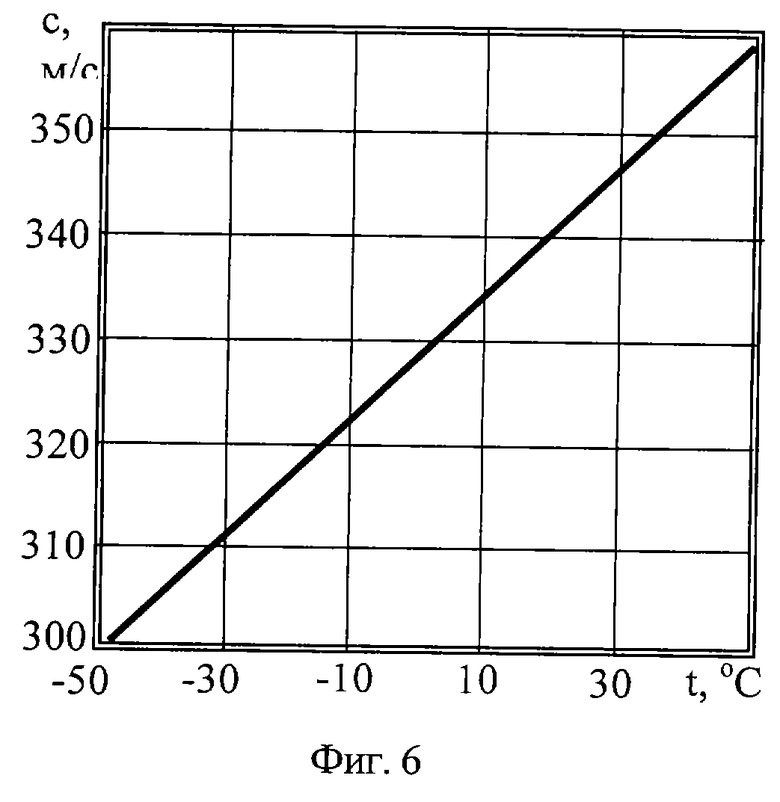
- на фиг.6 изображен график зависимости скорости звука в воздухе от температуры для нормального атмосферного давления 101325 Па;
- на фиг. 7 - схема воздействия на сейсмоприемник акустической и сейсмической волн от взрыва;
- на фиг. 8 - вид сигнала на выходе сейсмоприемника от взрывного воздействия.
Фронты сейсмической и акустической волн (фиг.8) будут сдвинуты во времени на время задержки tзад по причине того, что скорость распространения акустической волны (≈330 м/с) ниже скорости распространения сейсмической волны (≈600-1400 м/с) /5/. Скорость распространения акустической волны имеет слабую зависимость от температуры окружающей среды (±10%), а скорость распространения сейсмической волны сильно зависит от влажности и температуры /4, 5/. Этот факт целесообразно использовать для измерения скорости распространения сейсмической волны в конкретно взятом типе грунта, что позволяет выполнять адаптацию схемы обработки сейсмосигналов электронной схемой.
Для определения расстояний от точек с известными координатами до точки установки датчика (датчиков) применяется акустическая волна, возникшая от взрыва небольшого количества (100-150 г) взрывчатого вещества. Достоинства данного метода заключаются в том, что скорость распространения акустической волны меняется незначительно в зависимости от температуры воздуха и атмосферного давления (фиг. 6) и /4/ и может быть легко определена в отличие от скорости сейсмической волны, которая имеет больший коэффициент затухания и большой разброс по скорости в зависимости от метеоусловий и свойств грунта /4, 5/.
Реализуется предлагаемый способ следующим образом.
На определенном участке местности устанавливаются сейсмические датчики, имеющие свой номер и радиоканал для передачи данных на блок сбора и обработки информации.
Выбирают два ориентира с заранее известными координатами (развилка дорог, тригонометрический пункт и т.д., либо координаты места установки определяются с помощью приемника спутниковой навигации) и измеряется температура воздуха.
Координаты заносятся в блок сбора и обработки данных, куда заносится и скорость звука для реальных условий согласно графику (фиг.6).
Одновременно со взрывом (в точке 1) в блоке сбора и обработки данных включается таймер, который отсчитывает промежуток времени от момента взрыва до момента прихода сигнала от каждого сейсмодатчика, эти временные промежутки запоминаются как, например, t1-1, t1-2, t1-3, ..., t1-n в зависимости от количества датчиков (n - количество датчиков).
При взрыве во второй точке фиксируются временные промежутки t2-1, t2-2, t2-3, . .., t2-n, которые также запоминаются в блоке сбора и обработки данных. Используя координаты ориентиров по формулам (1) и (2), находятся угол наклона направления γ, проходящего через ориентиры 1 и 2 к горизонтальной линии координатной сетки Y, и расстояние между точками 1 и 2 (фиг.5).
Используя данные о скорости звука в реальных условиях и полученные значения t1-1-t1-n, t2-1-t2-n, рассчитываются расстояния l1N и l2N для каждого датчика
l1N = t1-N • Cзвук. (5)
По формулам (3) и (4) находятся поочередно координаты каждого датчика.
Данный способ позволяет также вычислять скорость распространения сейсмической волны в грунте
где Ссейс - скорость распространения сейсмической волны, м/с;
tзад - задержка фронта звуковой волны относительно фронта сейсмической волны (фиг.8), с.
Это позволяет определить физические свойства грунта и адаптировать аппаратуру, принимающую сейсмические сигналы, для повышения качества обработки принимаемых сигналов.
Источники информации
1. Псарев А.А., Коваленко А.Н. Военная топография. - М.: Военное издательство, 1986, 170 с.
2. Паша П. С. , Корнилюк Ф.Г. Военная топография. - М.: Военное издательство, 1952, 118 с.
3. ГОСТ 21.508-93. Система проектной документации для строительства. Правила выполнения рабочей документации генеральных планов предприятий, сооружений и жилищно-гражданских объектов.
4. Сапожников М.А. Справочник акустика. 2-е изд., перераб. и доп. - М.: Радио и связь, 1989, 7 с.
5. Гурвич И.И., Боганник Г.Н. Сейсмическая разведка: Учебник для вузов. 3-е изд., перераб. - М.: Недра, 1980, 551 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2001 |
|
RU2204849C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2002 |
|
RU2202811C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ НА ОХРАНЯЕМОМ РУБЕЖЕ | 2000 |
|
RU2165629C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2000 |
|
RU2175772C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2003 |
|
RU2236027C1 |
| СИГНАЛЬНО-ЗАГРАДИТЕЛЬНОЕ УСТРОЙСТВО | 2002 |
|
RU2215974C2 |
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| СПОСОБ УСТРОЙСТВА ПРОТИВОТАНКОВОГО ЗАГРАЖДЕНИЯ | 2002 |
|
RU2212622C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2004 |
|
RU2273867C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ПОЛЕТА СВЕРХЗВУКОВОГО СНАРЯДА | 2016 |
|
RU2670731C9 |


Использование: для определения координат мест установки сейсмических датчиков с адаптацией к свойствам грунта в месте установки датчика. Сущность: расстояние определяется по времени распространения акустической волны от взрыва заряда взрывчатого вещества в точке с известными координатами до установленного сейсмодатчика. В основу этого метода заложено свойство постоянности скорости звуковой волны, которая незначительно меняется от температуры и влажности воздуха, в отличие от скорости распространения сейсмической волны, которая может существенно меняться в зависимости от влажности, температуры и плотности грунта. Одновременно по времени задержки между сейсмической и акустической волнами определяют скорость распространения сейсмической волны, что позволяет адаптировать электронную схему обработки сейсмосигналов к свойствам грунта в месте установки датчика. Технический результат: повышение качества обработки принимаемых сигналов. 8 ил.
Сейсмоакустический способ привязки и адаптации сейсмических датчиков к местности, включающий способ линейных прямых засечек, предусматривающий определение координат объекта по координатам двух известных точек и расстоянию от этих точек до объекта, координаты которого необходимо найти, отличающийся тем, что расстояние от базовых точек до сейсмического датчика определяют по времени прохождения этого расстояния акустической волной от взрывов в базовых точках с заранее известными координатами, при этом расстояние вычисляют по известному значению скорости распространения звука (Сзвук) в среде и интервалу времени между моментом взрыва и моментом прихода акустического сигнала к сейсмическому датчику (t1-N), одновременно по времени задержки (tзад) между фронтами сейсмической и акустической волн рассчитывают значение скорости распространения сейсмической волны (Ссейс)
характеризующей физические свойства грунта, с учетом которых адаптируют электронную схему обработки сейсмосигналов к условиям применения сейсмодатчика в месте установки.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА СЕЙСМИЧЕСКИХ КОЛЕБАНИЙ ПОВЕРХНОСТИ ЗЕМЛИ | 1993 |
|
RU2087010C1 |
| СЕЙСМОАКУСТИЧЕСКИЙ СПОСОБ ОБНАРУЖЕНИЯ ОЧАГОВ ВЕРОЯТНОГО ВОЗНИКНОВЕНИЯ ДИНАМИЧЕСКИХ ЯВЛЕНИЙ В ШАХТАХ | 1996 |
|
RU2107821C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 1991 |
|
RU2029318C1 |
| СПОСОБ ПОЛУЧЕНИЯ КОНСЕРВОВ "ФРИКАДЕЛЬКИ РЫБНЫЕ В ГРЕЧЕСКОМ СОУСЕ" | 2011 |
|
RU2459489C1 |
| US 4604738 A, 05.08.1986. | |||

