Сейсмический локатор наземных объектов относится к области технических средств охраны и может быть использовано для определения азимута на обнаруженный объект и расстояния до него по сейсмическому сигналу при охране протяженных участков местности, территорий и подступов к различным объектам.
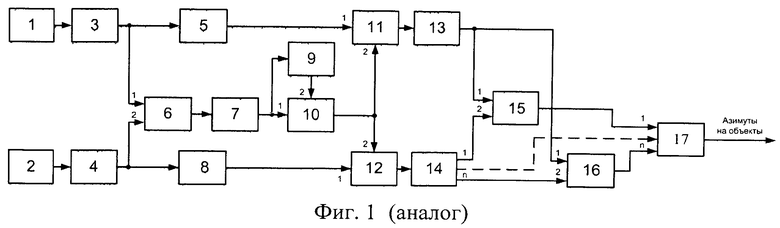
Известно "Устройство для адаптивной сейсмической пеленгации объектов" [1], содержащее (фиг.1): 1, 2 - сейсмические приемники (СП1, СП2), 3 - фильтр нижних частот первого канала (ФНЧ1), 4 - фильтр нижних частот второго канала (ФНЧ2), 5 - компенсирующую линию задержки первого канала (КЛ31), 6 - вычислитель функции разности (ВФР), 7 - сглаживающий фильтр (СФ), 8 - компенсирующую линию задержки второго канала (КЛ32), 9 - вычислитель порога (ВП), 10 - пороговое устройство (ПУ), 11 - ключ первого канала (Кл1), 12 - ключ второго канала (Кл2), 13 - линию задержки первого канала (Л31), 14 - линию задержки второго канала (Л32), 15, 16 - корреляторы (К1, К2), 17 - решающее устройство (РУ).
В рассмотренном устройстве для уменьшения ошибки измерения азимута пеленгатором используется адаптивная обработка сейсмических сигналов, заключающаяся в выделении полезных сигналов из сейсмического шума. Высокочастотные составляющие шумового сигнала удаляются фильтрами нижних частот. Для удаления низкочастотных составляющих фонового сигнала используется принцип разделения полезного и шумового сигналов во времени, реализованный на основе сравнения текущих абсолютных значений разности сигналов двух сейсмических приемников с порогом, вычисленным по шумовому сигналу.
Недостаток заключается в снижении точности пеленгования объектов при изменении скорости распространения сейсмической волны в грунте под воздействием метеофакторов (влажность, температура, атмосферное давление).
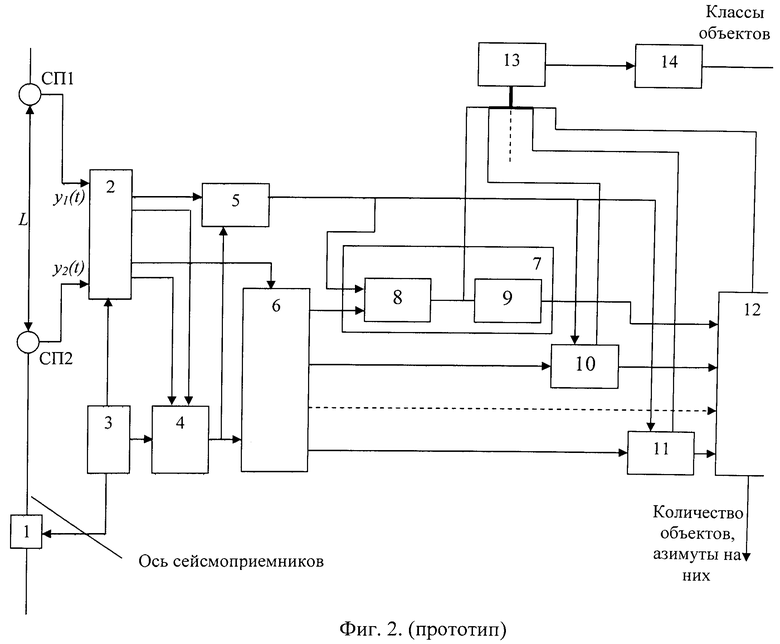
Из известных наиболее близким по технической сущности является "Адаптивный сейсмический корреляционный пеленгатор объектов" [2], содержащий (фиг.2): 1 - тестирующий модуль (ТМ), 2 - коммутатор (К), 3 - блок управления (БУ), 4 - вычислитель (В), 5 - первую линию задержки (Л31), 6 - вторую линию задержки (Л32), 7 - коррелятор первого канала канала (К1К), 8 - перемножитель (П), 9 - интегратор (И), 10 - коррелятор второго канала (К2К), 11 - коррелятор n-го канала (KnK), 12 - решающее устройство (РУ), 13 - селектор максимального сигнала (CMC), 14 - классификатор (К).
Адаптивный сейсмический корреляционный пеленгатор объектов для реализации функции пеленгования использует способ разнесенной пассивной локации. Основным информационным признаком для определения направления на объект является функция взаимной корреляции сигналов в двух каналах обработки сигналов. По величине задержки сигнала принимается решение о величине азимута на объект. Изменение величины задержки сигнала эквивалентно управлению диаграммой направленности сейсмической антенной системы, что позволяет раздельно классифицировать обнаруженные объекты.
Для адаптации к измененяемой под воздействием метеофакторов скорости распространения сейсмической волны используется тестовое воздействие. По времени задержки прихода сигнала тестового воздействия на второй сейсмоприемник определяется текущее значение скорости распространения сейсмической волны и производится подстройка линий задержки.
Классификатор принимает решение о предполагаемом классе обнаруженного объекта. В случае наличия нескольких объектов на охраняемом рубеже могут наблюдаються максимумы на выходах нескольких корреляторов. Поочередная коммутация селектором максимального сигнала выходов корреляторов к классификатору позволяет последовательно классифицировать обнаруженные объекты. Возможен подсчет числа объектов на охраняемом рубеже в том случае, если объекты находятся друг от друга на таком расстоянии, которое позволяет их фиксировать раздельно, т.е. в случае узкой диаграммы направленности, при которой система сейсмических датчиков обладает разрешением по азимуту.
Недостаток заключается в том, что нельзя однозначно определить азимут обнаруженного объекта, а также вычислить расстояние до него.
Предлагаемое изобретение направлено на уменьшение ошибки измерения азимута обнаруженного объекта, а также определения расстояния до него.
Это достигается тем, что в адаптивный сейсмический корреляционный пеленгатор объектов, содержащий два сейсмических приемника, выходы которых подключены ко входам первой и второй линий задержки, выходы которых (выход первой линии задержки и n-выходов второй линии задержки) соединены со входами n-корреляторов, выходы которых подключены к n-входам решающего устройства, согласно предлагаемому изобретению дополнительно введены третий сейсмический приемник, третья линия задержки, n-корреляторов, второе решающее устройство, вычислитель азимута, вычислитель скорости сейсмической волны и вычислитель расстояния, причем выход третьего сейсмического приемника подключен ко входу третьей линии задержки, n-выходов которой соединены со вторыми входами n-корреляторов, первые входы которых подключены к выходам первой линии задержки, выходы n-корреляторов соединены с соответствующими n-входами второго решающего устройства, выход которого подключен ко второму входу вычислителя азимута и ко второму входу вычислителя скорости сейсмической волны, первые входы которых соединены с выходом первого решающего устройства, выход вычислителя скорости сейсмической волны подключен ко входу вычислителя расстояния.
Введение третьего сейсмического приемника позволяет расположить сейсмические приемники в вершинах прямоугольного треугольника (фиг.4).
При таком расположении сейсмических приемников при условии r>>d (где r - расстояние до источника возмущения, d - база между сейсмическими приемниками) приближенно можно считать два треугольника с гипотенузами СП1-СП2 и СП1-СП3 прямоугольными (фиг.4). Это допущение будет тем ближе к действительности, чем больше расстояние до источника возмущения.
Азимут на объект α при этом приближенно можно определять по формуле (1)
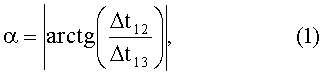
где Δt12 и Δt13 - задержки между сигналами с разных приемников.
Кроме того, по знакам временных задержек можно определить с погрешностью, не превышающей d/2 по каждой координате, квадрант декартовой системы координат, в котором находится источник возмущения [3].
Введение третьей линии задержки, n-корреляторов и второго решающего устройства позволяет вычислять задержку между сигналами с первого и третьего сейсмических приемников.
Введение вычислителя азимута позволяет вычислить азимут на объект по формуле 1.
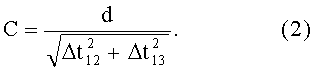
Введение вычислителя скорости сейсмической волны С позволяет вычислить скорость распространения сейсмической волны по формуле 2
Введение вычислителя расстояния позволяет по рассчитанной скорости сейсмической волны определить расстояние до объекта локации. В результате предварительных экспериментальных исследований была получена зависимость между скоростью сейсмической волны и расстоянием источник-приемник [3]. Эта зависимость закладывается в устройство на этапе его проектирования.
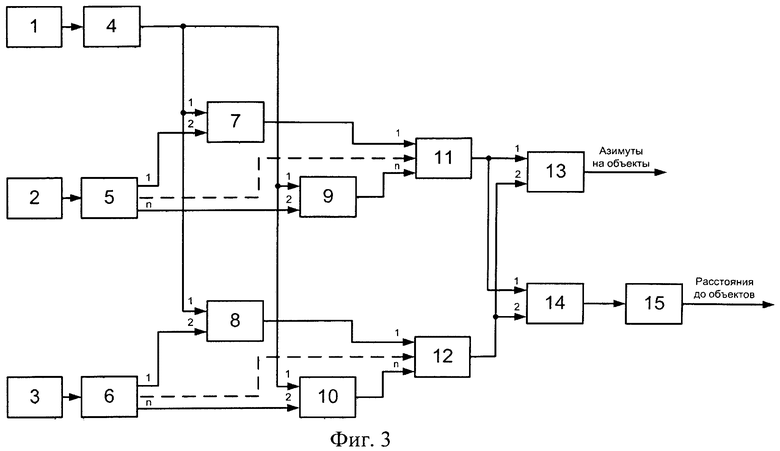
На фиг.3 представлена блок-схема предлагаемого устройства пеленгации объектов по сейсмическим сигналам.
На фиг.4 изображена схема расположения трех сейсмических приемников, расположенных в вершинах прямоугольного равнобедренного треугольника (трехточечная система пеленгации).
Устройство (фиг.3) содержит:
1 - первый сейсмический приемник;
2 - второй сейсмический приемник;
3 - третий сейсмический приемник;
4 - первую линию задержки;
5 - вторую линию задержки;
6 - третью линию задержки;
7-10 - коррелятор;
11 - первое решающее устройство;
12 - второе решающее устройство;
13 - вычислитель азимута;
14 - вычислитель скорости сейсмической волны;
15 - вычислитель расстояния.
При этом выходы первого сейсмического приемника (СП) 1, второго СП 2 и третьего СП 3 соединены со входами первой 4, второй 5 и третьей 6 линиями задержек соответственно, выход первой линии задержки 4 подключен к первым входам 2·n-корреляторов 7-10, ко вторым входам корреляторов 7, 9 подключены n-выходов второй линии задержки 5, а ко вторым входам корреляторов 8,10 подключены n-выходов третьей линии задержки 6, выходы n-корреляторов 7, 9 соединены с соответствующими n-входами первого решающего устройства 11, выход которого подключен к первым входам вычислителя азимута 13 и вычислителя скорости сейсмической волны 14, выходы n-корреляторов 8,10 соединены с соответствующими n-входами второго решающего устройства 12, выход которого подключен ко вторым входам вычислителя азимута 13 и вычислителя скорости сейсмической волны 14, выход которого соединен со входом вычислителя расстояния 15.
Работает сейсмический локатор наземных объектов следующим образом.
Для расчета азимута и расстояния до цели вычисляются две временные задержки прихода сейсмической волны на две пары сейсмических приемников: пара сейсмических приемников с номерами 1, 2 и пара сейсмических приемников с номерами 1, 3.
Сейсмические сигналы с выходов сейсмических приемников 1, 2 поступают на вход первого корреляционного измерителя разности временных запаздываний, состоящего из линий задержек первого 4 и второго 5 каналов, n-корреляторов 7, 9 и решающего устройства 11. Сейсмические сигналы с выходов сейсмических приемников 1, 3 поступают на вход второго корреляционного измерителя разности временных запаздываний, состоящего из линий задержек первого 4 и третьего 6 каналов, n-корреляторов 8, 10 и решающего устройства 12.
По рассчитанным временным задержкам вычислителем азимута 13 по формуле 1 определяется азимут на объект, а вычислителем скорости сейсмической волны 14 по формуле 2 - значение скорости распространения сейсмической волны в грунте. По известному значению скорости сейсмической волны и априорно заданной функциональной зависимости расстояния до объекта от скорости сейсмической волны вычислитель расстояния 15 определяет расстояние до объекта.
Предлагаемое устройство позволяет уменьшить ошибку измерения азимута на объект сейсмическим локатором и вычислить расстояние до объекта.
Источники информации
1 Пат. 2410751 Российская Федерация, МПК G01V 1/16 G08B 13/181. Устройство для адаптивной сейсмической пеленгации объектов / Дудкин В.А., Вольсков А.А., Иванцов Д.С., Прокина Н.В.; заявитель и патентообладатель ФГБОУ ВПО «Пензенский государственный университет». - №2009119839/08; опубл. 25.05.2011.
2 Пат. 2248015 Российская Федерация, МПК G01V 1/16, G01S 3/80. Адаптивный сейсмический корреляционный пеленгатор объектов / Крюков И.Н., Иванов В.А., Дюгованец А.П., Онуфриев Н.В.; заявитель и патентообладатель Калининградский военный институт ФПС России. - №2003118049/28; опубл. 10.03.2005.
3 Экспериментальная оценка скорости распространения сейсмической волны при решении задач пеленгации объектов. Акимова Ю.С., Лебедев Л.Е., Чистова Г.К. «Инфокоммуникационные технологии» .Том 6, 2008. Спец. Выпуск «Технологии безопасности и охраны». С.77-82.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ СЕЙСМИЧЕСКОЙ ПЕЛЕНГАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2410751C1 |
| Сейсмический пеленгатор с малой базой установки сейсмоприемников | 2020 |
|
RU2757972C1 |
| Сейсмическое средство обнаружения с возможностью пеленгации наземных объектов | 2017 |
|
RU2650703C1 |
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2330304C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2004 |
|
RU2273867C1 |
| СЕЙСМИЧЕСКИЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2010 |
|
RU2442190C1 |
| СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2001 |
|
RU2204849C2 |
Заявленное изобретение относится к области технических средств охраны и может быть использовано для определения азимута на обнаруженный объект и расстояния до него по сейсмическому сигналу при охране протяженных участков местности, территорий и подступов к различным объектам. Устройство содержит три сейсмических приемника, три линии задержек, 2·n-корреляторов, два решающих устройства, вычислитель азимута, вычислитель скорости сейсмической волны, вычислитель расстояния. Для обеспечения однозначного измерения азимута обнаруженного объекта, а также определения скорости сейсмической волны, в устройстве вычисляются две временные задержки, а по априорно заданной функциональной зависимости вычисляется расстояние до объекта. Технический результат - повышение точности определения азимута обнаруженного объекта и расстояния до него. 4 ил.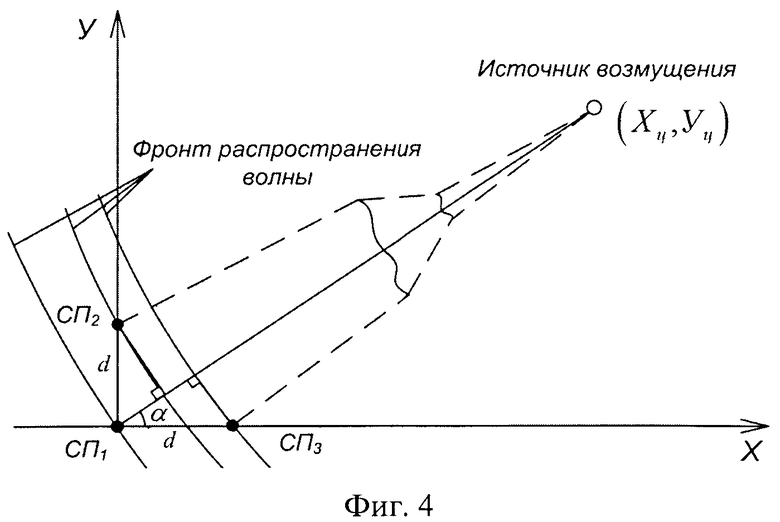
Сейсмический локатор наземных объектов, содержащий два сейсмических приемника, первую и вторую линии задержек, n-корреляторов и решающее устройство, отличающееся тем, что в устройство дополнительно введены третий сейсмический приемник, третья линия задержки, n-корреляторов, второе решающее устройство, вычислитель азимута, вычислитель скорости сейсмической волны и вычислитель расстояния, причем выход третьего сейсмического приемника подключен ко входу третьей линии задержки, n-выходов которой соединены со вторыми входами n-корреляторов, первые входы которых подключены к выходам первой линии задержки, выходы n-корреляторов соединены с соответствующими n-входами второго решающего устройства, выход которого подключен ко второму входу вычислителя азимута и ко второму входу вычислителя скорости сейсмической волны, первые входы которых соединены с выходом первого решающего устройства, выход вычислителя скорости сейсмической волны подключен ко входу вычислителя расстояния.
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| СЕЙСМИЧЕСКИЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2010 |
|
RU2442190C1 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ СЕЙСМИЧЕСКОЙ ПЕЛЕНГАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2410751C1 |
| СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2001 |
|
RU2204849C2 |
| АДАПТИВНЫЙ СЕЙСМИЧЕСКИЙ КОРРЕЛЯЦИОННЫЙ ПЕЛЕНГАТОР ОБЪЕКТОВ | 2003 |
|
RU2248015C1 |
| US 7724608 B2, 25.02.2010 | |||

