Изобретение относится к радиотехнике и может быть использовано в устанавливаемых на подвижных платформах пассивных пеленгационных системах определения линии положения (ЛП) источников радиоизлучения (ИРИ).
Общеизвестна задача определения ЛП ИРИ на плоскости XY [1, с.182]. Одно из решений этой задачи предполагает использование угломерных (пеленгационных) устройств для измерения направления на обнаруженный ИРИ [1, с. 182-183]. В качестве угломерных устройств могут быть использованы, в частности, пеленгаторы с моноимпульсными антенными датчиками, т.е. моноимпульсные пеленгаторы (МП) [1, с.405-413; 2].
Для угломерных устройств ЛП ИРИ является прямая, проходящая через конкретную точку плоскости XY в направлении на ИРИ. Для МП, входящих в состав стационарных РЛС кругового обзора, такой точкой является место установки МП, которая совместно с осью антенны МП, направленной на ИРИ, определяет ЛП ИРИ.
Другим, в некотором смысле противоположным, является случай, когда МП установлен на платформе, осуществляющей прямолинейное движение вдоль оси Х с постоянной скоростью V, а ось антенной системы МП фиксируется постоянно в направлении оси Y, перпендикулярном траектории его движения. Сам ИРИ при этом предполагается неподвижным. Эта ситуация является характерной для радиолокаторов бокового обзора [1, с.393-399]. При работе РЛС бокового обзора в пассивном режиме ЛП ИРИ можно однозначно определить моментом t0, при котором направление прихода волны от ИРИ совпадает с направлением оси Y, т.е. вдоль оси антенной системы МП. Этот момент t0 однозначно связан с точкой траектории МП, из которой ИРИ виден под прямым углом к курсу МП (выражаясь морской терминологией, - на траверзе), а следовательно полностью определяет ЛП ИРИ.
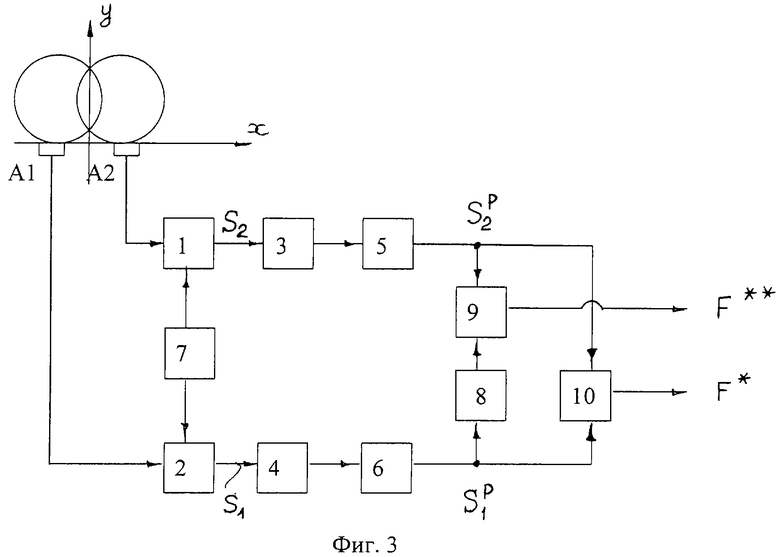
Недостаток аналогов, независимо от способа (круговой или боковой) обзора пространства, состоит в низкой точности определения ЛП ИРИ при существующих ограничениях на конструктивные размеры антенных датчиков МП. Поясним сказанное на примере МП, в котором используется моноимпульсный антенный датчик фазового типа [2, с.67-68], состоящий из двух разнесенных на расстояние L (база) вдоль оси Х антенн A1 и А2, оси которых ориентированы в направлении оси Y. В МП этого типа расположение ИРИ вдоль оси МП означает равноудаленность ИРИ от центров антенн A1 и А2, а отклонение ИРИ от оси МП определяется путем измерения текущих значений коэффициента корреляции между сигналами S1(t) и S2(t), принимаемыми антеннами A1 и А2 соответственно.
Известно, что чувствительность МП к изменению угла прихода радиоволн от ИРИ пропорциональна нормированной базе L/λ между антеннами, где λ - длина волны ИРИ. Это объясняет стремление к увеличению точности пеленгации путем увеличения L (при заданном λ). Вместе с тем, для выполнения другого фундаментального требования - однозначности измерения пеленга на ИРИ, - рост L должен сопровождаться увеличением диаметра антенн А1 и А2, который не должен быть меньше расстояния L между ними. Когда возможности создания таких антенн ограничены, противоречие между требованиями высокой точности и однозначности измерения пеленга не может быть устранено в рамках традиционных методов обработки.
Острота этого противоречия частично может быть сглажена в способе-прототипе, который предполагает боковой обзор пространства. Для предложенного способа пассивные РЛС бокового обзора с моноимпульсным антенным датчиком фазового типа являются базовыми радиотехническими системами, а соответствующий комплекс операций, производимых в МП над принимаемым сигналом ИРИ для пеленгации и определения ЛП ИРИ, представляет собой способ-прототип. При этом будем предполагать, что в МП прототипа измеряются два коэффициента корреляции - реальный F* и мнимый F**, которые совместно образуют так называемый комплексный коэффициент корреляции МП: F=F*+jF**. Его реальная составляющая F* получается при наличии фазовращателя на π/2 в канале обработки сигнала S1(t), а мнимая F** - при его отсутствии [2, с.250].
Недостаток прототипа состоит в неоднозначности определения линии положения ИРИ в случае, когда расстояние между антеннами МП фазового типа значительно превышает диаметр каждой из антенн.
Цель изобретения - устранение неоднозначности определения линии положения ИРИ.
Для этого в способе-прототипе, в котором осуществляется:
- перемещение МП фазового типа вдоль оси Х плоскости XY с постоянной скоростью V;
- прием сигналов ИРИ на две разнесенные вдоль оси Х антенны A1 и А2, оси которых направлены постоянно вдоль оси Y;
- ограничение принятых антеннами А1 и А2 сигналов S1(t) и S2(1);
- измерение текущих значений F(t) комплексного коэффициента корреляции F между принятыми сигналами;
- определение по текущим значениям комплексного коэффициента корреляции F(t) момента времени t0, при котором ИРИ равноудален от антенн A1 и А2, и который однозначно характеризует ЛП ИРИ, дополнительно осуществляется:
- выделение из ограниченных сигналов S1(t) и S2(t) "p"-x гармоник S1 р(t) и S2 р(t) соответственно;
- измерение мгновенной частоты Ω(t) комплексного коэффициента корреляции F(t);
- измерение момента времени, когда мгновенная частота Ω(t) достигает своего максимального значения Ωmax, причем:
- измерение коплексного коэффициента корреляции F(t) производится для сигналов S1 p(t) и S2 p(t);
- a t0 определяется как момент достижения мгновенной частотой Ω(t) своего максимального значения Ωmax
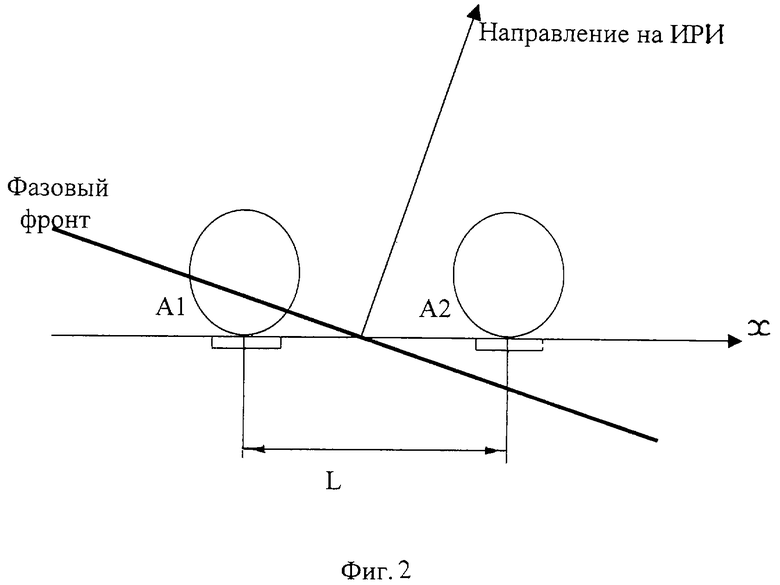
На фиг. 1 изображено геометрическое расположение ИРИ и МП, а также фаза Ф(х), мгновенная частота Ω(х), выходной сигнал СК компаратора 20 и синхроимпульс СИ как функции пространственной координаты х=Vt.
На фиг.2 дано увеличенное изображение антенного датчика МП фазового типа и фазового фронта сигнала ИРИ в окрестности антенны МП.
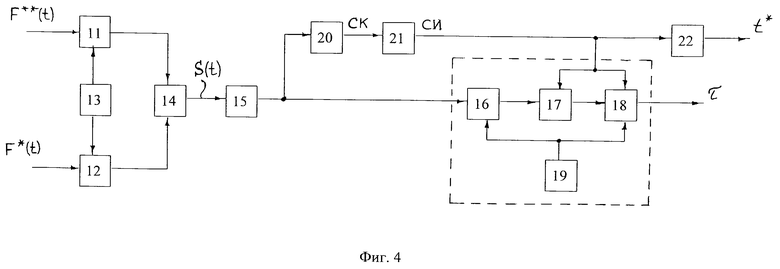
На фиг.3 изображена схема МП фазового типа, формирующая реальную F*(t) и мнимую F*(t) составляющие комплексного коэффициента корреляции F(t). Здесь обозначено: 1, 2 - смеситель; 3, 4 - УПЧ; 5, 6 - усилитель-ограничитель с полосовым фильтром, настроенным на центральную частоту, равную рω; 7 - гетеродин; 8 фазовращатель на π/2; 9, 10 - фазовый детектор. Схема фиг.3 отличается от типовой наличием элементов 5, 6.
На фиг. 4 изображена возможная схемная реализация измерителя мгновенной частоты Ω(t) и момента t0 достижения мгновенной частотой Ω(t) своего максимального значения. Здесь обозначено: 11, 12 - перемножители; 13 - генератор гармонического колебания; 14 - сумматор, 15 - частотный детектор; 16 - аналого-цифровой преобразователь (АЦП); 17 - блок выбора максимума (БВМ); 18 - блок регистрации времени (БРВ); 19 - генератор тактовых импульсов (ГТИ); 20 - компаратор; 21 - дифференцирующая цепочка, 22 - счетчик реального времени.
Рассмотрим преобразования, производимые над сигналами ИРИ согласно предлагаемому способу. Пусть ИРИ располагается в точке плоскости с координатами: х= 0, у=R и излучает непрерывный гармонический сигнал. Фазовый фронт этого сигнала имеет вид окружности с центром в точке (0, R), а фазовое распределение имеет вид:
ϕ(x,y)=(2π/λ)[x2+(y-R)2]-0,5 (1)
Временно предположим, что МП неподвижен и расположен в пункте наблюдения с координатами (х, 0), т.е. в точке (х, 0) находится центр базы МП фазового типа. Тогда принимаемые антеннами A1 и A2 сигналы S1(t) и S2(t) отличаются по фазе, которая зависит от координаты "х" пункта наблюдения. При условии, что база L не является слишком большой, так что волну можно считать плоской, разность Ф(х) между фазой сигнала S2(t) и сигнала S1(t) можно рассчитать по формуле
Ф(x) = L∂ϕ/∂x, (2)
которая после подстановки в нее выражения (1) дает
Ф(х)=(2π/λ)L(x/R)[1+(x/R)2)0,5. (3)
Зависимость Ф(х) изображена на фиг.1. В выражение (3) не вошел такой параметр как размер самих антенн ввиду того, что в исходных предположениях антенны имеют слабую направленность, позволяющую выделить лишь одну полуплоскость (Y≥0), т.е. обнаружить ИРИ лишь с одного (левого или правого) борта носителя МП.
После ограничения сигналов S1(t) и S2(t) в элементах 5, 6 с выделением с помощью полосовых фильтров их "р"-х гармоник S1 p(t) и S2 p(t) разность их фаз (3) также увеличивается в "р" раз. Реальная F*(x) и мнимая F**(x) составляющие комплексного коэффициента корреляции F(x), рассматриваемые как функции пространственной переменной "х", выделяются на выходах фазовых детекторов 10,9 соответственно и выражаются через разность фаз рФ(х) их входных сигналов S1 p(t) и S2 p(t):
F*(x) =Cos[pФ(x)]; F**(x) = Sin[pФ(x)]. (4)
Ранее введенное предположение о неподвижности МП можно снять, если формулы (3), (4) остаются справедливыми после замены в них пространственной переменной "х" на произведение x=Vt. Это имеет место во многих практических ситуациях, т. к. интервал времени, в течение которого рассматриваемая как функция времени t разность фаз РФ(t) изменяется на величину π/2, значительно превышает интервал времени, в течение которого производится измерение разности фаз рФ(t).
Поэтому в дальнейшем для перемещающегося МП мы будем продолжать пользоваться выражением (4) для реальной F*(x) и мнимой F**(x) составляющих комплексного коэффициента корреляции F(x), считая в них переменную "х" равной произведению x=Vt. В дальнейшем, когда комплексный коэффициент корреляции F, его реальная F* и мнимая F** составляющие будут рассматривать не как функции пространственной переменной "х", а как функции времени t, для них используются обозначения F(t), F*(t) и F**(t) соответственно.
Мгновенная частота Ω(x) комплексного коэффициента корреляции F(x) получается путем дифференцирования рФ(х) по времени с учетом равенства x=Vt:
Ω(x)=(2π/λ)(pLV/R)[1+(x/R)2]-1,5 (5)
и эта зависимость изображена на фиг.1.
Гармоническая модель сигнала ИРИ является, очевидно, идеализацией реальных сигналов ИРИ. Для более общей модели сигнала ИРИ в виде непрерывного фазоманипулированного сигнала в выходных сигналах F*(t) и F**(t) фазовых детекторов 10, 9, рассматриваемых как функции времени t, на фоне регулярного закона изменения от времени вида (4) могут наблюдаться выбросы импульсного характера (разной полярности). Однако, если длительность элементарных посылок фазоманипулированного сигнала значительно превышает время распространения радиоволн вдоль базы L, то, выбирая постоянную времени сглаживающего фильтра на выходе фазовых детекторов 10, 9 соизмеримой с длительностью элементарных посылок, указанные выбросы в выходных сигналах F*(t), F**(t) будут устранены.
Наблюдая за изменением мгновенной частоты Ω(x) и рассматривая ее как функцию Ω(t) времени t, можно определить момент t0, при котором она достигает своего максимального значения Ωmax. Именно в этот момент ИРИ находится на траверзе МП, т.е. равноудален от антенн A1 и А2. Это можно сделать автоматически с помощью устройства фиг.4. В нем из двух квадратурных составляющих комплексного коэффициента корреляции F(t)=F*(t)+jF**(t) с помощью генератора 13 частоты ω, перемножителей 11, 12 и сумматора 14 формируется высокочастотный сигнал S(t), модулируемый по фазе pФ(t):
S(t)=F*(t)Sinωt+F**(t)Cosωt=Sin[ωt+pФ(t)] (6)
Мгновенная частота Ω(t) этого сигнала выделяется частотным детектором 15, построенным, например, на расстроенных контурах, причем один из них настроен на частоту ω, а другой - на частоту ω+Ωmax, где Ωmax- максимальное частота комплексного коэффициента корреляции F(t). Выходной сигнал частотного детектора 15 повторяет форму зависимости Ω(x) фиг.1. Момент t0 достижения им максимального значения определяется с помощью элементов 16-22 схемы фиг.4.
Работа части устройства фиг.4, включающей элементы 16, 17, 18 и 19, подробно описана в [3] и по существу сводится к измерению времени задержки τ выходного сигнала частотного детектора 15 (точнее, его максимального значения) относительно вспомогательного синхроимпульса СИ, подаваемого на управляющие входы блоков 17 и 18 перед появлением этого максимального значения. С помощью СИ производится обнуление входящих в блоки 17, 18 регистров и счетчика времени задержки τ. Момент t* возникновения СИ можно зафиксировать, используя счетчик абсолютного времени 22, и тогда абсолютное время t0 достижения мгновенной частотой Ω(t) своего максимального значения определяется как
t0=t*+τ. (7)
Таким образом, пара величин τ и t* полностью определяют момент t0, когда ИРИ находится на равных расстояниях от антенн МП.
Сам синхроимпульс СИ целесообразно формировать в момент t*, близкий к моменту t0 (но не позже его), чтобы уменьшить требования к объему (разрядности) входящего в БРВ 18 счетчика времени задержки τ. Это производится частью схемы фиг.4, включающей элементы 20 и 21. Выходной сигнал частотного детектора 15, пропорциональный Ω(t), подается на сигнальный вход компаратора 20, на опорный вход которого поступает опорное напряжение, выбираемое, например, на уровне 0,35 от максимального значения Ωmax. На выходе компаратора 20 формируется сигнал СК постоянной амплитуды фиг.1, на всем протяжении которого частота Ω(t) превышает пороговую величину 0,35Ωmax. Синхроимпульс СИ формируется на выходе дифференцирующей цепочки 21 и совпадает по времени с передним фронтом выходного сигнала СК компаратора 20.
Процедура измерения τ заканчивается после заполнения счетчика времени задержки τ в блоке БРВ 18. Предполагается, что объем этого счетчика заполняется приблизительно к концу интервала наблюдения ИРИ.
Поясним сказанное конкретным примером, когда МП размещен на автомобиле и производит разведку ИРИ в городских условиях. Выберем следующие значениях радиотехнических и дальностно-скоростных параметров: р=5-7, L/λ=30-100; V=20 м/с, R=40 м. Максимальное значение частоты при этом составляет: (1/2π)Ωmax = 75-350 Гц. Линейный интервал наблюдения ИРИ выберем равным дальности до ИРИ: х=±R. Значение мгновенной частоты Ω(x) при x/R=1, соответствующее согласно (5) уровню 0,35Ωmax, лежит в интервале: (1/2π)Ω)(=26-125 Гц. Таким образом, в течение времени наблюдения ИРИ, равном 2R/V=4 с, вариация мгновенной частоты Ω(t) составляет либо 26-75 Гц (р=5, L/λ=30), либо 125-350 Гц (р=7, L/λ=100).
По найденному значению t0 ЛП определяется в относительной (движущейся) системе координат, связанной с МП. При наличии службы единого (абсолютного) времени и навигационной системы, обеспечивающих "привязку" движущейся платформы МП к местности, можно определить ЛП также и в абсолютной (земной) системе координат.
Заметим, что задача определения ЛП ИРИ часто оказывается вспомогательной при решении более общей задачи идентификации объекта, на котором установлен ИРИ. Покажем, как она может быть решена без привязки к абсолютной системе координат. Во-первых, вариации мгновенной частоты Ω(t) могут быть зафиксированы в реальном масштабе времени человеком-оператором "на слух" без использования дополнительных устройств фиг.4, для чего достаточно "озвучить" временную зависимость комплексного коэффициента корреляции F(t) путем подключения выхода одного из фазовых детекторов 9, 10 к наушникам оператора.
Если к тому же на мобильной платформе МП имеется возможность установить оптический прибор для наблюдения за местностью, ось которого направлена вдоль оси Y, то оператор может осуществить грубую "привязку" момента прохождения мгновенной частотой Ω(t) своего максимального значения к конкретному объекту на местности (автомобилю, зданию, окну дома и т.д.) и идентифицировать таким образом пункт установки или носитель ИРИ.
Во-вторых, процедуру идентификации места расположения ИРИ можно осуществить более точно в стационарных условиях после проведения обзора пространства, для чего на платформе МП должна быть установлена видеокамера, фиксирующая, помимо изображения местности вдоль оси Y, также абсолютное время t* от счетчика 22. Имея набор данных, получаемых устройством фиг.4, состоящий из различных пар значений {t*, τ} разведанных ИРИ, можно идентифицировать объекты-носители ИРИ при просмотре видеозаписи, осуществляя "привязку" этих данных к изображению объектов на местности.
В заключение отметим роль априорной информации о дальности R до ИРИ. Техническая реализация предложенного способа (фиг.4) оказалась достаточно простой именно потому, что дальность до ИРИ предполагалась приблизительно известной (с точностью = 30-50%), т.к. сведения об R использовались в частотном детекторе 15, компараторе 20, а также при выборе объема (разрядности) входящего в БРВ 18 счетчика времени задержки τ.
Вместе с тем, в рассмотренной ситуации - разведка ИРИ в городских условиях, - такая оценка дальности R может быть легко получена, т.к. потенциально возможные места установки разведуемых ИРИ - расположенные вдоль улиц здания, автомобили и т.д. - легко наблюдаются визуально и дальность до них может быть измерена с помощью вспомогательных устройств - либо пассивной оптической системой, либо активной радиолокационной системой. Учитывая, что на достаточно больших интервалах пути, сравнимых с протяженностью улиц, расстояние R остается приблизительно постоянным, обновление данных об R в устройстве обработки должно осуществляться достаточно редко.
Расшифровка использованных буквенных обозначений:
V - скорость платформы, на которой установлен МП;
L - расстояние (база) между антеннами A1 и А2 моноимпульсного пеленгатора фазового типа;
S1(t) и S2(t) - сигналы, принимаемыми антеннами A1 и А2 соответственно;
S1 p(t) и S2 p(t) - "р"-е гармоники сигналов S1(t) и S2(t) соответственно после ограничения сигналов S1(t) и S2(t);
S(t) - высокочастотный сигнал, формируемый на выходе сумматора 14 измерителя фиг.4;
F - комплексный коэффициент корреляции между сигналами S1 p(t) и S2 p(t);
F* - реальная составляющая комплексного коэффициента корреляции F;
F** - мнимая составляющая комплексного коэффициента корреляции F;
F(t) - комплексный коэффициент корреляции между сигналами S1 p(t) и S2 p(t), рассматриваемый как функция времени t;
F(x)- комплексный коэффициент корреляции между сигналами S1 p(t) и S2 p(t), рассматриваемый как функция координаты х;
F*(t) - реальная составляющая комплексного коэффициента корреляции между сигналами S1 p(t) и S2 p(t), рассматриваемая как функция времени t;
то же - выходной сигнал фазового детектора 10;
F**(t) - мнимая составляющая комплексного коэффициента корреляции между сигналами S1 p(t) и S2 p(t), рассматриваемая как функция времени t;
то же - выходной сигнал фазового детектора 9;
F*(x) - реальная составляющая комплексного коэффициента корреляции F(x);
F**(x) - мнимая составляющая комплексного коэффициента корреляции F(x);
Ω - мгновенная частота комплексного коэффициента корреляции F;
Ω(t) - мгновенная частота комплексного коэффициента корреляции F(t), рассматриваемая как функция времени t. Это же - выходной сигнал частотного детектора 15;
Ω(x) - мгновенная частота комплексного коэффициента корреляции F(x), рассматриваемая как функция координаты х;
Ωmax- максимальное значение мгновенной частоты Ω(t);
Ф(t) - разность фаз сигналов S1(t) и S2(t), рассматриваемая как функция времени t;
Ф(х) - разность фаз сигналов S1(t) и S2(t), рассматриваемая как функция координаты х;
pФ(t) - фаза сигнала S(t), рассматриваемая как функция времени t;
рФ(х) - фаза сигнала S(t), рассматриваемая как функция координаты х;
λ - длина волны ИРИ;
R - расстояние, отсчитываемое от МП в направлении, перпендикулярном траектории МП и совпадающим с осью МП. По другому: это расстояние между двумя прямыми, одна из которых есть траектория МП, а другая - представляет собой множество точек, в каждой из которых может располагаться ИРИ;
ϕ (х, у) - фазовое распределение сигнала ИРИ на плоскости XY;
t - абсолютное время;
t0 - момент времени, при котором ИРИ равноудален от антенн A1 и А2 и при котором мгновенная частота Ω(t) достигает своего максимального значения Ωmax;
t* - момент возникновения СИ;
τ - время между моментом достижения выходным сигналом Ω(t) частотного детектора 15 своего максимального значения Ωmax и моментом возникновения t* синхроимпульса СИ;
∂/∂x - операция взятия частной производной по переменной "х";
х - пространственная координата.
Источники информации
1. Ю. П. Гришин и др. Радиотехнические системы / Под ред. Ю.М. Казаринова. - М., 1990.
2. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М., 1984.
3. Авт. свид. 1824596, G 01 R 29/02 (Измеритель задержки импульса).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕЛЕНГАТОР БОКОВОГО ОБЗОРА | 2003 |
|
RU2252428C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ В МОНОИМПУЛЬСНЫХ ГОЛОВКАХ САМОНАВЕДЕНИЯ | 2006 |
|
RU2303806C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЗАПРЕЩЁННЫХ ПРЕДМЕТОВ АРОЧНЫМ МЕТАЛЛОДЕТЕКТОРОМ | 2015 |
|
RU2589238C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОИЗЛУЧЕНИЯ В БЛИЖНЕЙ ЗОНЕ ИСТОЧНИКА | 2012 |
|
RU2505834C1 |
| СПОСОБ АМПЛИТУДНОГО ПЕЛЕНГОВАНИЯ ИНТЕРФЕРИРУЮЩИХ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2722715C1 |
| КОМПОНЕНТНЫЙ ИНДИКАТОР БЛИЖНЕГО ПОЛЯ | 2007 |
|
RU2349927C1 |
| Способ обнаружения источника радиоимпульсов | 2018 |
|
RU2674073C1 |
| Способ контроля излучения нескольких источников частотно-неразделимых сигналов | 2019 |
|
RU2704027C1 |
| МОНОИМПУЛЬСНОЕ ФАЗОВОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2007 |
|
RU2344434C1 |
| Способ моноимпульсного пеленгования источников поляризованных радиосигналов | 2024 |
|
RU2834965C1 |
Изобретение относится к радиотехнике и может быть использовано в устанавливаемых на подвижных платформах пассивных пеленгационных системах определения линии положения источников радиоизлучения. Способ определения линии положения источника радиоизлучения, в котором осуществляется перемещение моноимпульсного пеленгатора фазового типа вдоль оси Х плоскости XY с постоянной скоростью V, прием сигналов источника радиоизлучения на две разнесенные вдоль оси Х антенны A1 и А2, оси которых направлены постоянно вдоль оси Y, ограничение принятых антеннами A1 и А2 сигналов S1(t) и S2(t), измерение комплексного коэффициента корреляции F(t) между принятыми сигналами, определение по данным F(t) момента времени t0, выделение из ограниченных сигналов S1(t) и S2(t) "p"-x гармоник S1 p(t) и S2 p(t) соответственно, измерение мгновенной частоты Ω(t) комплексного коэффициента корреляции F(t), измерение момента времени, причем измерение комплексного коэффициента корреляции F(t) производится для сигналов S1 p(t) и S2 p(t), a t0 определяется как момент достижения мгновенной частотой Ω(t) своего максимального значения. Достигаемым техническим результатом изобретения является устранение неоднозначности определения линии положения источника радиоизлучения. 4 ил.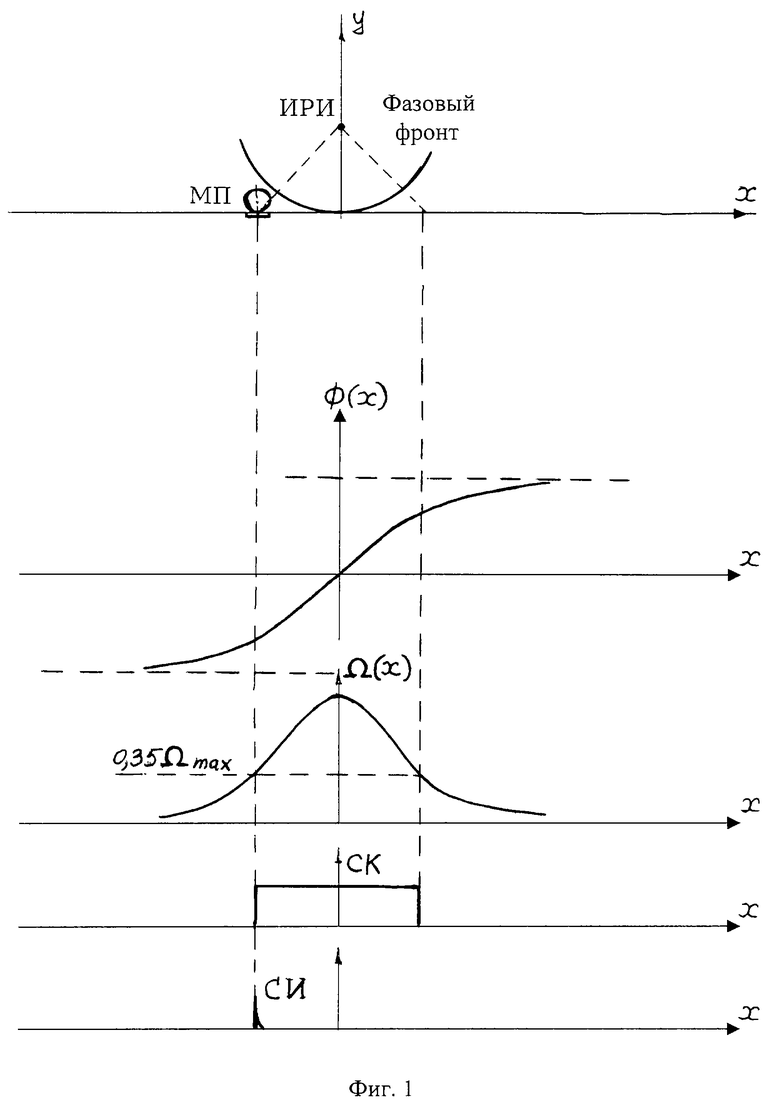
Способ определения линии положения источника радиоизлучения, в котором осуществляется перемещение моноимпульсного пеленгатора фазового типа вдоль оси Х плоскости XY с постоянной скоростью V, прием сигналов источника радиоизлучения на две разнесенные вдоль оси Х антенны A1 и А2, оси которых направлены постоянно вдоль оси Y, ограничение принятых антеннами A1 и А2 сигналов S1(t) и S2(t), измерение комплексного коэффициента корреляции F(t) между принятыми сигналами, определение по данным F(t) момента времени t0, при котором источник радиоизлучения равно удален от антенн А1 и А2 и который однозначно характеризует линию положения источника радиоизлучения, отличающийся тем, что дополнительно осуществляется выделение из ограниченных сигналов S1(t) и S2(t) "p"-x гармоник S1 p(t) и S2 p(t) соответственно, измерение мгновенной частоты Ω(t) комплексного коэффициента корреляции F(t), измерение момента времени, когда мгновенная частота Ω(t) достигает своего максимального значения, причем измерение комплексного коэффициента корреляции F(t) производится для сигналов S1 p(t) и S2 p(t), а t0 определяется как момент достижения мгновенной частотой Ω(t) своего максимального значения.
| ЛЕОНОВ А.И., ФОМИЧЕВ К.И | |||
| Моноимпульсная радиолокация | |||
| - М.: Радио и связь, 1984, с.250 | |||
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УСЛОВИЯХ МНОГОЛУЧЕВОСТИ | 1997 |
|
RU2141675C1 |
| RU 95106208 А1, 20.01.1997 | |||
| US 3798647, 19.03.1974 | |||
| US 3889267, 10.06.1975. | |||

