Заявляемое моноимпульсное фазовое устройство автоматического сопровождения по направлению относится к области радиолокации и предназначено для автоматического сопровождения локационного объекта (ЛО) по угловым координатам.
Моноимпульсные фазовые устройства автоматического сопровождения по направлению хорошо известны. Используемый в таких устройствах метод определения угловых координат ЛО основан на оценке разности хода лучей от ЛО до нескольких пространственно разнесенных точек приема с последующим преобразованием этой разности в фазовые соотношения принимаемых сигналов. Данные фазовые соотношения с учетом геометрии антенной системы позволяют одновременно определять угловые координаты ЛО в двух ортогональных плоскостях, например азимута и угла места, и осуществлять автоматическое сопровождение ЛО по направлению.
Теоретическое обоснование и варианты технической реализации моноимпульсных фазовых устройств автоматического сопровождения по направлению, представляющих собой аналоги заявляемого устройства, содержатся в ряде литературных источников, например в [1-3], где доказательство эффективности фазовой процедуры определения угловых координат ЛО и соответствующих устройств автоматического сопровождения приводится как результат оптимального статистического синтеза при аддитивном воздействии дельта-коррелированного внутриприемного шума. Однако в этих же литературных источниках указывается, что оптимальным подобный синтез можно считать только условно, поскольку: во-первых, методика синтеза распространяется только на случай значительного превышения полезным сигналом уровня шума (при отношениях сигнал-шум более трех-пяти); во-вторых, проводится факторизация двумерной постановки задачи синтеза устройства автоматического сопровождения по двум угловым координатам и сведение ее к двум независимым одномерным задачам - отдельно по азимуту и углу места, что исключает возможность получения двумерных технических решений, соответствующих совместной пространственной обработке пространственно-временного сигнала от всей апертуры антенной системы.
В известных моноимпульсных фазовых устройствах автоматического сопровождения по направлению основные недостатки их статистического синтеза (при указанных выше ограничениях) проявляются в преимущественно области малых отношений сигнал-шум, которая в практическим плане является весьма важной для автоматического сопровождения ЛО по направлению. Именно в этой области доминирует флюктуационная погрешность в работе устройств автоматического сопровождения ЛО по направлению, что ограничивает их реальную чувствительность и дальность действия.
В числе аналогов заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению можно также указать и различные технические решения, которые, по сравнению с изложенными выше, не отвечают критериям оптимальности даже в области высоких отношений сигнал-шум. Одно из них приводится в [4, с.77, рис.4.9] и содержит три отдельные антенны, фазовые центры которых являются вершинами прямоугольного треугольника. Подобное расположение антенн влечет за собой неоптимальное использование площади их суммарного раскрыва и, как следствие этого, дает малую точность автоматического сопровождения ЛО по направлению.
Недостаток известных моноимпульсных фазовых устройств автоматического сопровождения по направлению состоит в том, что в области малых отношений сигнал-шум они не являются оптимальными ввиду неполного использования информативных признаков входного пространственно-временного сигнала, поступающего от ЛО. Связано это со спецификой синтеза и построения данных устройств автоматического сопровождения, для которых в качестве исходной используется линейная модель пространственной обработки. Такая модель полностью справедлива для высоких отношений сигнал-шум, но область малых отношений сигнал-шум она описывает приближенно. На основе этой линейной модели, позволяющей проводить факторизацию по двум независимым угловым координатам, возможно получение оптимального результата только при отношениях сигнал-шум выше трех-пяти (по амплитуде), на что неоднократно указывается в [1, 3]. Это означает, что условия радиолокационного взаимодействия, при которых полезный сигнал от ЛО и мешающие воздействия (например, внутриприемный шум) соизмеримы по мощности, в настоящее время учитываются только в приближенном виде как для синтеза, так и при построении моноимпульсных фазовых устройств автоматического сопровождения по направлению.
Известно, что радиолокационное взаимодействие характеризуется непостоянством и большим разбросом энергетических отношений сигнал-шум в зависимости от условий распространения электромагнитных волн, эволюции ЛО в пространстве и т.п. [1], при этом возможны резкие падения мощности полезного сигнала, приводящие к нарушению процесса надежного сопровождения по угловых координат, т.е. к срыву слежения.
Таким образом, очевидную значимость для качества работы локационной системы в целом имеют точностные характеристики моноимпульсного фазового устройства автоматического сопровождения по направлению в области малых отношений сигнал-шум.
Наиболее близким по технической сущности к заявляемому техническому решению является моноимпульсное фазовое устройство автоматического сопровождения по направлению, состоящее из двух идентичных независимых следящих контуров по азимуту и углу места, описанных (за исключением передающей части) в [4, с.68, рис.4.2], выбранное в качестве прототипа. Устройство-прототип содержит антенную систему, апертура которой состоит из четырех идентичных отдельных непересекающихся областей антенных элементов равной эффективной площади, многоканальное моноимпульсное приемное устройство, первый, второй, третий и четвертый входы которого подключены к соответствующим выходам антенной системы, первую и вторую цепи, состоящие из последовательно соединенных соответствующих формирователя сигнала рассогласования и блока управления антенной системой, при этом выходы первого и второго блоков управления антенной системой соединены соответственно с первым и вторым входами антенной системы, первые входы первого и второго формирователей сигнала рассогласования соединены соответственно с первым и вторым выходами многоканального моноимпульсного приемного устройства, а вторые входы первого и второго формирователей сигнала рассогласования соединены соответственно с третьим и четвертым выходами многоканального моноимпульсного приемного устройства.
Плоскость раскрыва (апертура) антенной системы устройства-прототипа пространственно разделена на четыре отдельные идентичные непересекающиеся и примыкающие друг к другу области антенных элементов, т.е. на четыре парциальные апертуры, эффективные площади которых равны между собой. Каждая из четырех парциальных апертур формирует в пространстве идентичные по коэффициенту направленного действия парциальные диаграммы направленности, фазовые центры которых располагаются в фазовых центрах каждой из отдельных четырех парциальных апертур.
Четыре парциальные диаграммы направленности образуют две равносигнальные плоскости в двух взаимно ортогональных плоскостях (азимутальную и угломестную), в которых оцениваются угловые рассогласования по азимуту и углу места. При пересечении эти две равносигнальные плоскости образуют равносигнальное направление (РСН) антенной системы, являющееся нормалью к центру раскрыва антенны.
Такой принцип разбиения апертуры антенны обеспечивает одинаковые потенциальные точности оценки рассогласований по угловым координатам в обеих плоскостях, что чаще всего и требуется. Каждую область антенной системы (отдельную парциальную апертуру) с помощью соответствующей диаграммообразующей схемы для антенной решетки, либо соответствующим размещением параболической зеркальной антенны с рупором, можно привести к одной точке на плоскости пеленгования, соответствующей ее фазовому центру.
Четыре фазовых центра попарно образуют два перпендикулярных канала автоматического сопровождения - по азимуту и по углу места. Равенство метрических характеристик азимутального и угломестного каналов автоматического сопровождения обеспечивается за счет одинакового разноса фазовых центров, при этом базы пеленгования для обеих плоскостей равны между собой, а четыре точки приема расположены эквидистантно по окружности диаметра d.
С первого и третьего выходов многоканального моноимпульсного приемного устройства принимаемые сигналы поступают соответственно на первый и второй входы первого формирователя сигнала рассогласования (ФСР) (для азимутальной плоскости), а со второго и четвертого выходов многоканального моноимпульсного приемного устройства - соответственно на первый и второй входы второго ФСР (для угломестной плоскости). Каждый ФСР выполняет функцию комплексного перемножения входных сигналов с последующим выделением мнимой части. Такая операция эквивалентна фазовому детектированию при смещении фазы одного из входных сигналов на π/2 [5, с.162-172] или синусному фазовому детектированию, реализуемому фазовым дискриминатором [6, с.60-63].
На выходах первого и второго ФСР в устройстве-прототипе формируются сигналы углового рассогласования ЛО относительно РСН в плоскостях азимута и угла места соответственно.
С выходов первого и второго ФСР сигналы углового рассогласования по азимуту и по углу места поступают соответственно на входы первого и второго блоков управления антенной системой (БУА), которые формируют на своих выходах два управляющих воздействия для изменения пространственной ориентации РСН антенной системы устройства-прототипа по азимуту и углу места. Эти два управляющих воздействия с выходов первого и второго БУА поступают соответственно на первый и второй входы антенной системы, являющиеся входами управления антенной системой по азимуту и углу места, и изменяют ориентацию ее РСН в пространстве. Таким образом происходит замыкание обратных связей в двух контурах автоматического сопровождения ЛО - по азимуту и по углу места.
Методика и результаты статистического анализа некоторых устройств автоматического сопровождения по направлению представлены в [1, 5, 6, 7]. Конкретные результаты подобного анализа, непосредственного описывающие характеристики точности для прототипа моноимпульсного фазового устройства автоматического сопровождения по направлению, получены в [8], где дается оценка его основного функционального показателя качества работы - дисперсии флюктуационной погрешности автоматического сопровождения ЛО по направлению.
В соответствии с результатами [8] флюктуационные погрешности автоматического сопровождения ЛО по азимуту и углу места между собой независимы, а каждая из них является суммой двух комбинационных процессов: «сигнал-шум» и «шум-шум». Образование этих комбинационных процессов определяется способом выделения углового сигналов рассогласования в первом и втором ФСР, что подробно рассматривается в [5, 7].
С учетом того, что в устройстве-прототипе для двух ортогональных плоскостей автоматического сопровождения ЛО (азимутальной и угломестной) совпадают между собой как динамические характеристики, так и статистические характеристики приведенных к входу помех, дисперсии флюктуационных погрешностей автоматического сопровождения ЛО по азимуту и углу места равны между собой и описываются единым выражением [8]:
где ΔfH - эквивалентная полоса частот замкнутого контура автоматического сопровождения по одной угловой координате (азимуту или углу места), соответствующая частотной передаточной функции (9);
ΔfSN и ΔfNN - эквивалентные полосы частот флюктуации на выходах ФСР вида «сигнал-шум» и «шум-шум» соответственно;
q=Ps/PN - отношение сигнал-шум по мощности в полосе приема;
μ=πd/λ - коэффициент, характеризующий пеленгационную чувствительность, зависящий от метрических характеристик антенной системы: длины волны λ и диаметра окружности d, на которой расположены точки приема;
κ=ΔfNN/ΔfSN - безразмерный коэффициент, значение которого может находиться в диапазоне от 1 до  [8].
[8].
Величина D0 в (1) - дисперсия флюктуационной погрешности автоматического сопровождения ЛО по одной угловой координате, отражает основной функциональный точностной показатель качества работы устройства-прототипа и далее будет использоваться для сравнения с аналогичным показателем заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению с целью количественного подтверждения технического результата изобретения.
Недостатком устройства-прототипа является недостаточная точность автоматического сопровождения локационного объекта по направлению в условиях малых отношений сигнал-шум, поскольку прототип не реализует потенциальных возможностей эффективной оценки угловых координат в нижней части диапазона отношений сигнал-шум, т.е. в той области, где повышение точности автоматического сопровождения имеет существенное практическое значение для реальных задач.
Технический результат от использования изобретения заключается в повышении точности автоматического сопровождения ЛО по направлению в условиях малых отношений сигнал-шум.
Сущность изобретения заключается в том, что в заявляемое моноимпульсное фазовое устройство автоматического сопровождения по направлению, содержащее так же, как и прототип, антенную систему, апертура которой состоит из идентичных отдельных непересекающихся областей антенных элементов равной эффективной площади, многоканальное моноимпульсное приемное устройство, входы которого подключены к соответствующим выходам антенной системы, первую и вторую цепи, состоящие из последовательно соединенных соответствующих формирователя сигнала рассогласования и блока управления антенной системой, при этом выходы первого и второго блоков управления антенной системой соединены соответственно с первым и вторым входами антенной системы, а первые входы первого и второго формирователей сигнала рассогласования соединены соответственно с первым и вторым выходами многоканального моноимпульсного приемного устройства, в отличие от прототипа введены третья цепь, состоящая из последовательно соединенных третьего формирователя сигнала рассогласования и третьего блока управления антенной системой, выход которого соединен с третьим входом антенной системы, при этом первый вход третьего формирователя сигнала рассогласования подключен к третьему выходу многоканального моноимпульсного приемного устройства, а первый, второй и третий выходы многоканального моноимпульсного приемного устройства соединены соответственно со вторыми входами третьего, первого и второго формирователей сигнала рассогласования, причем антенная система выполнена из трех примыкающих друг к другу областей антенных элементов, фазовые центры которых расположены в вершинах равностороннего треугольника, помещенного в плоскость раскрыва антенной системы, при этом одна из сторон треугольника параллельна азимутальной плоскости, а выходы фазовых центров являются соответствующими выходами антенной системы.
Технический результат от использования изобретения определяется следующим.
Флюктуации выделяемых в формирователях сигналов угловых рассогласований ЛО относительно равносигнального направления (РСН) как в заявляемом устройстве, так и в устройстве-прототипе, содержат две составляющие, первая из которых обусловлена комбинационным процессом вида "сигнал-шум", а вторая - комбинационным процессом вида "шум-шум". Причина возникновения комбинационных флюктуации связана с методом выделения угловых рассогласований ЛО относительно РСН, основанном на перемножении принимаемых сигналов (фазовом детектировании).
В области больших отношений сигнал-шум во флюктуациях выходных сигналов формирователей сигнала рассогласования преобладает составляющая вида "сигнал-шум", а при близких или меньших единице отношениях сигнал-шум преобладает составляющая вида "шум-шум". Принципиальная разница между зависимостями дисперсий комбинационных процессов "сигнал-шум" и "шум-шум" от мощности шума состоит в том, что в первом случае эта зависимость линейная, во втором - квадратичная. Поэтому в условиях, когда при снижении отношения сигнал-шум начинает доминировать составляющая вида "шум-шум", происходит резкое повышение флюктуационной погрешности выделяемых угловых рассогласований ЛО относительно РСН.
Таким образом, при определении точностных характеристик моноимпульсного фазового устройства автоматического сопровождения по направлению, которые определяют ТТХ, особое внимание следует уделять именно составляющей вида "шум-шум".
Флюктуационные погрешности выделяемых угловых рассогласований ЛО относительно РСН, обусловленные комбинационными составляющими вида "сигнал-шум", для заявляемого устройства и устройства-прототипа равны между собой по среднеквадратическому значению (дисперсии), т.к. оба устройства отвечают критерию оптимальности [3] для области высоких отношений сигнал-шум. Количественное обоснование данного равенства погрешностей, означающее равенство дисперсий флюктуации погрешностей автоматического сопровождения ЛО заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению и устройства-прототипа в области высоких отношений сигнал-шум, будет показано далее на основе статистического анализа характеристик двух сравниваемых устройств.
В области малых отношений сигнал-шум, когда существенно влияние комбинационной оставляющей вида "шум-шум", заявляемое устройство обеспечивает примерно вдвое меньшую дисперсию флюктуационных погрешностей автоматического сопровождения ЛО по каждой из двух ортогональных угловых координат, например - по азимуту и по углу места, относительно устройства-прототипа.
Снижение в заявляемом устройстве флюктуационных погрешностей автоматического сопровождения по направлению, возникающих в силу влияния составляющей вида "шум-шум", основано на увеличении числа одновременно используемых оценок угловых рассогласований ЛО относительно РСН, на основе которых осуществляется автоматическое сопровождение ЛО.
В заявляемом моноимпульсном фазовом устройстве автоматического сопровождения по направлению одновременно выделяются три угловых рассогласования в плоскостях, смещенных друг относительно друга на угол 120 град., в отличие от устройства-прототипа, где одновременно выделяются только два таких независимых угловых рассогласования, соответствующих каждой из двух ортогональных плоскостей - азимуту и углу места.
Флюктуационные составляющие трех угловых рассогласований ЛО относительно РСН и, соответственно, трех управляющих антенной системой сигналов зависимы между собой, но степень их взаимной зависимости уменьшается при снижении отношения сигнал-шум. Связано это с тем, что данные флюктуационные погрешности содержат как коррелированные между тремя контурами автоматического сопровождения составляющие вида "сигнал-шум", так и некоррелированные - вида "шум-шум", при этом удельный вес составляющих второго вида тем больше, чем ниже отношение сигнал-шум. Увеличение удельного веса некоррелированных между контурами автоматического сопровождения составляющих вида "шум-шум" при уменьшении отношения сигнал-шум влечет за собой снижение уровня взаимной межканальной корреляции флюктуационных составляющих и, соответственно, уменьшение суммарной дисперсии флюктуационной погрешности оценок угловых рассогласований ЛО относительно РСН и ошибки автоматического сопровождения по сравнению с устройством-прототипом.
Несмотря на коррелированность флюктуационных погрешностей в области высоких отношений сигнал-шум заявляемое устройство и устройство-прототип обеспечивают равную точность автоматического сопровождения ЛО по направлению, что будет показано далее.
Сущность изобретения поясняется чертежами, где
на фиг.1 приведена функциональная схема заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению, где:
1 - антенная система (А);
2 - многоканальное моноимпульсное приемное устройство (МПУ);
3.1, 3.2, 3.3 - первый, второй и третий формирователи сигналов рассогласования (ФСР);
4.1, 4.2, 4.3 - первый, второй и третий блоки управления антенной системой (БУА).
На фиг.2 представлена измерительная система координат, связанная с антенной системой моноимпульсного фазового устройства автоматического сопровождения по направлению.
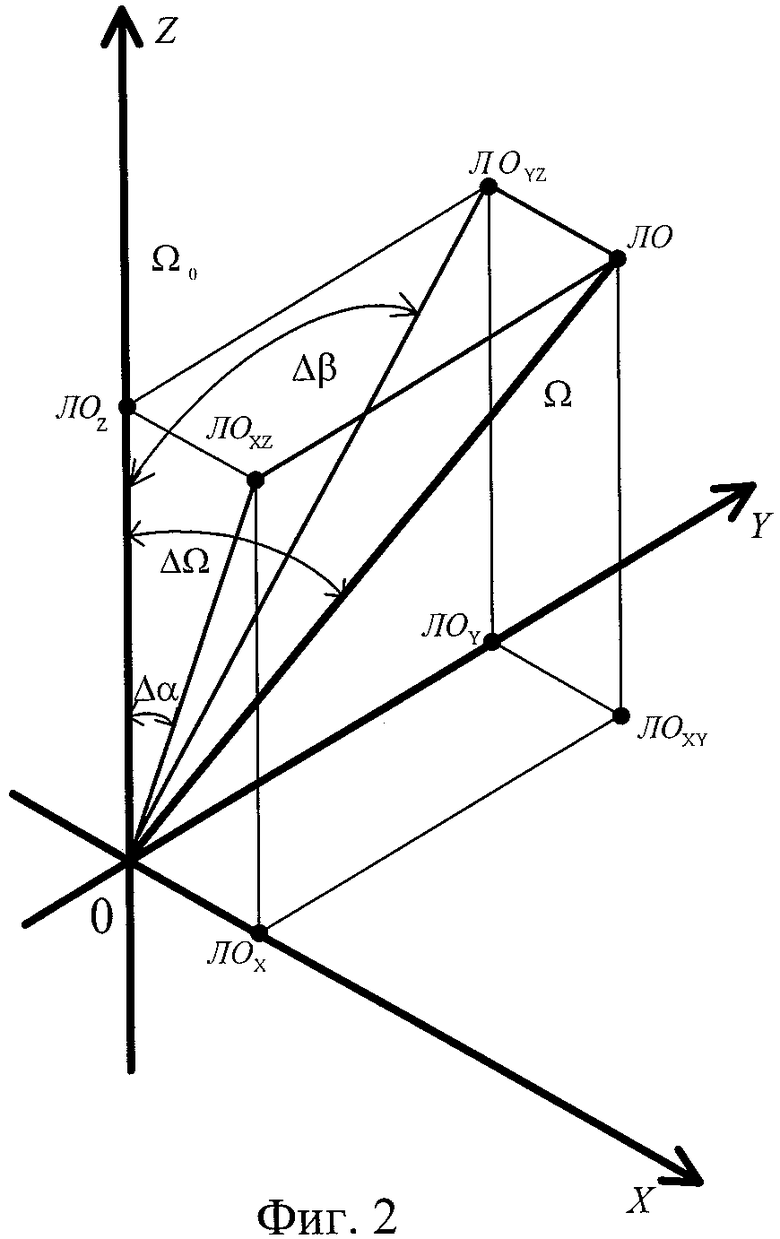
На фиг.3 показано расположение фазовых центров антенных приемных каналов на апертуре антенной системы для заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению.
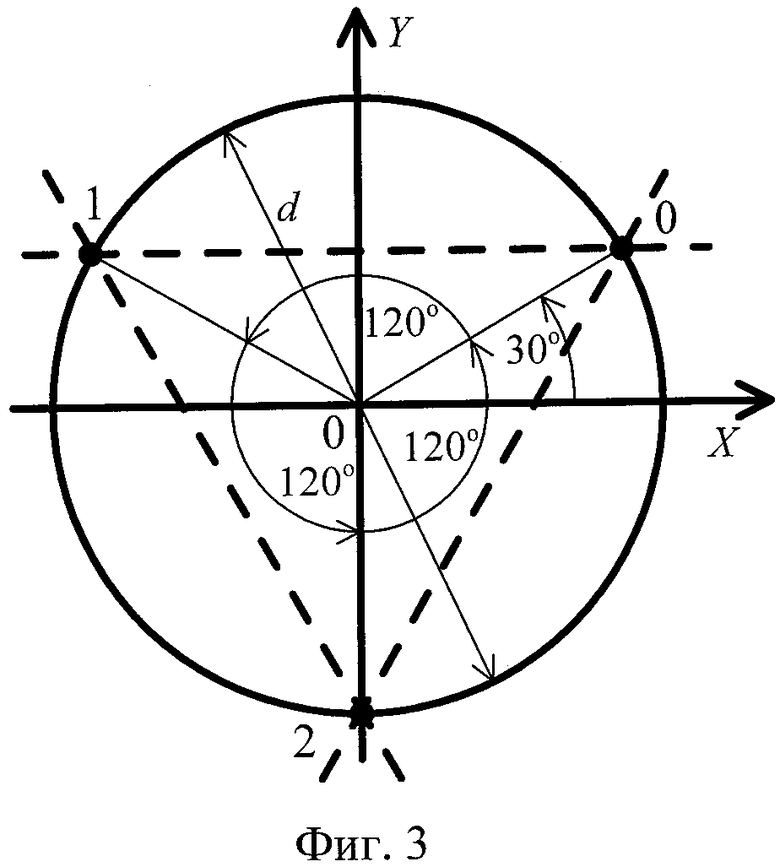
На фиг.4 приведена структурная схема многоканального МПУ 2, где:
5.1, 5.2, 5.3 - смесители (СМ);
6.1, 6.2, 6.3 - усилители промежуточной частоты (УПЧ);
7 - гетеродин (Г);
8 - блок автоматической регулировки усиления (АРУ).
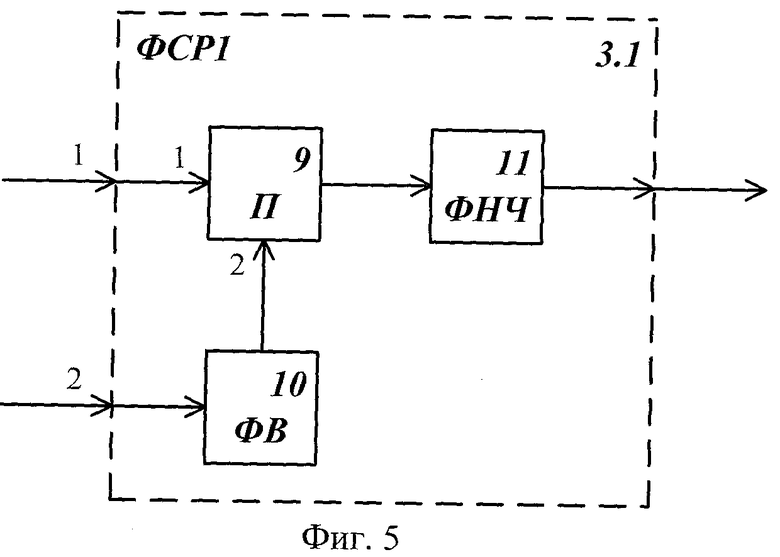
На фиг.5 приведена структурная схема первого ФСР 3.1, где:
9 - перемножитель (П);
10 - фазовращатель (ФВ) на π/2;
11 - фильтр низких частот (ФНЧ).
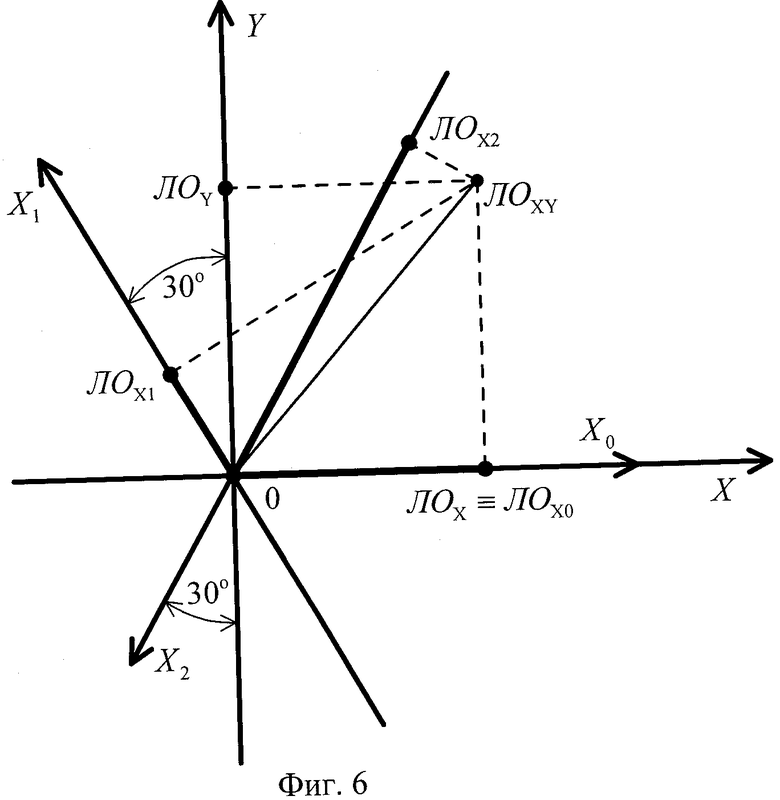
На фиг.6 изображено координатное преобразование угловых рассогласований ЛО относительной РСН, проводимое в заявляемом моноимпульсном фазовом устройстве автоматического сопровождения по направлению.
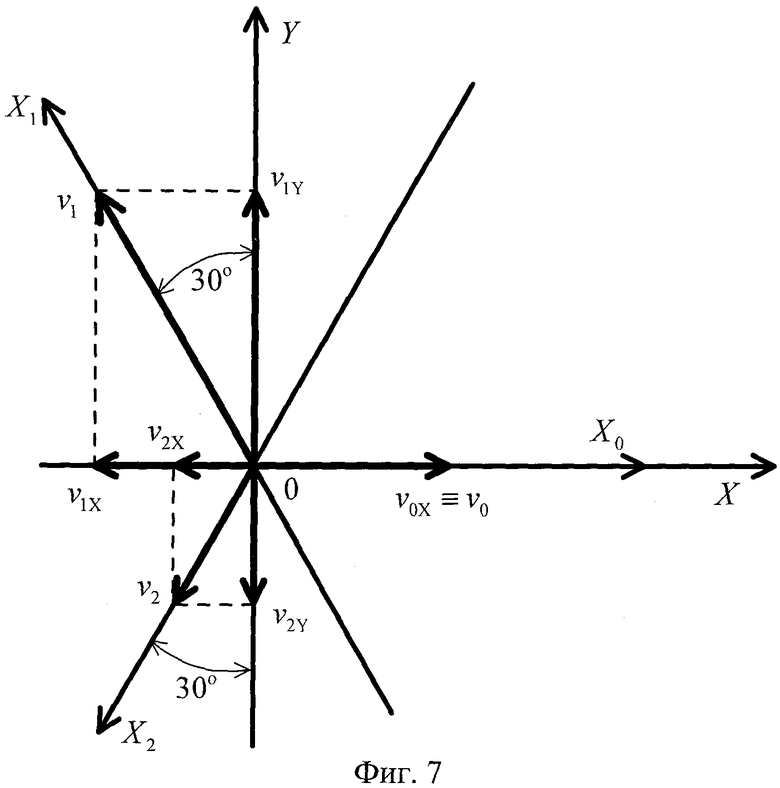
На фиг.7 показано расположение осей управления антенной системой, соответствующих каналам автоматического сопровождения ИРИ, для заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению.
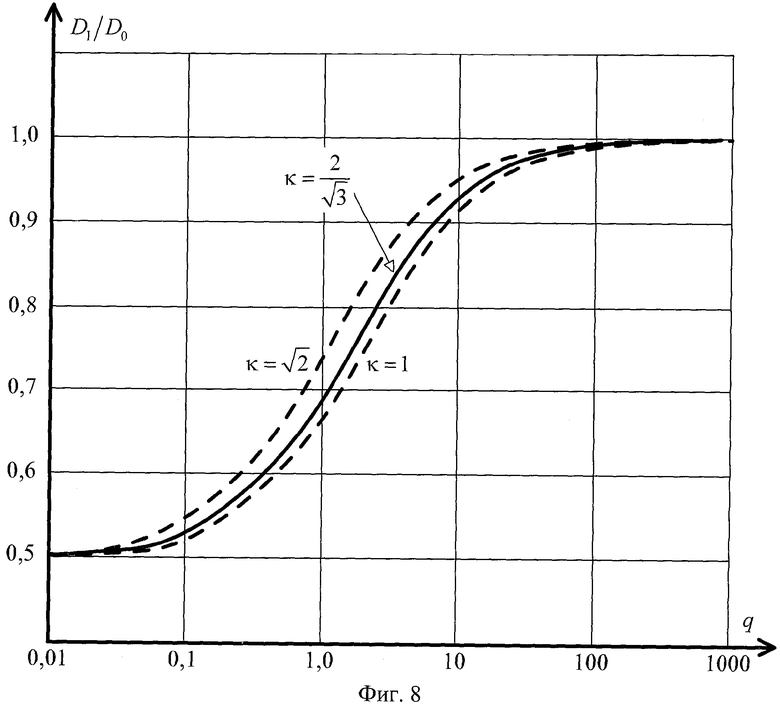
На фиг.8 приведен график зависимости отношения дисперсий флюктуационной погрешности автоматического сопровождения по одной угловой координате (например, по азимуту или углу места), для заявляемого устройства и устройства-прототипа, иллюстрирующий количественное выражение технического результата.
Предлагаемое моноимпульсное фазовое устройство сопровождения по направлению (фиг.1) содержит антенную систему (А) 1, многоканальное моноимпульсное приемное устройство (МПУ) 2, первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам антенной системы; три цепи последовательно соединенных формирователя сигнала рассогласования (ФСР) 3 и блока управления антенной (БУА) 4, выходы первого, второго и третьего БУА 4 соединены соответственно с первым, вторым и третьим входами антенной системы; первые входы первого, второго и третьего ФСР 3 соединены соответственно с первым, вторым и третьим выходами МПУ 2, а вторые входы первого, второго и третьего ФСР 3 - соответственно со вторым, третьим и первым выходами МПУ 2.
Предлагаемое устройство работает следующим образом.
Пространственно-временной сигнал от ЛО приходит в виде потока мощности П, который преобразуется антенной системой 1 в ее выходные электрические сигналы суммарной мощностью Р0=АП, где А - эффективная площадь антенной системы. Для заявляемого устройства и устройства-прототипа величины П, А и Р0 полагаются равными, что
обеспечивает тождественность их энергетических характеристик в одинаковых располагаемых ограниченных условиях непосредственного конструктивного исполнения их антенной системы, например мидель ракеты или носовая часть самолета.
Направление прихода потока мощности П, т.е. направление на ЛО, представим в виде вектора-строки Ω=[α β] двух угловых координат: азимута α - в горизонтальной плоскости и угла места β - в вертикальной плоскости.
Подобным же образом представим и угловые координаты равносигнального направления (РСН) антенной системы 1 как вектор-строку Ω0=[α0 β0] двух опорных угловых координат: в горизонтальной плоскости - азимута α0 и в вертикальной плоскости - угла места β0. Для антенной системы 1 заявляемого устройства равносигнальным направлением является направление синфазного приема полезного (информативного) сигнала в различных точках приема антенной системы 1, которое должно совпадать в режиме слежения с направлением на ЛО. Это направление, описываемое вектором Ω0, представляет собой результат работы заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению - векторную регулируемую величину, т.е. отклик на векторное задающее воздействие Ω.
Функция элемента сравнения автоматической системы [6], состоящая в вычитании регулируемой величины Ω0 из задающего воздействия Ω, реализуется непосредственно антенной системой 1, РСН которой совпадает с осью 0Z декартовой измерительной системы координат XYZ, которая показана на фиг.2. Из приведенного построения видно, что угловое рассогласование между векторами Ω и Ω0 можно рассматривать раздельно для азимутальной плоскости Δα=α-α0 и для угломестной плоскости Δβ=β-β0. При этом антенной системой 1 принимается сигнал от ЛО, в котором направление на ЛО характеризуется вектором углового рассогласования Δ Ω= Ω- Ω0=[Δα Δβ]=[α-α0 β-β0]. На практике, в нормальных условиях автоматического сопровождения по направлению, абсолютные значения рассогласований Δα и Δβ малы и не превышают единиц градусов [4], поэтому справедливы приближения sinΔα≅Δα и sinΔβ≅Δβ.
Плоскость раскрыва (апертура) антенной системы 1 заявляемого устройства пространственно разделена на три идентичные отдельные непересекающиеся и примыкающие друг к другу области антенных элементов, т.е. на три парциальные апертуры, эффективные площади которых равны между собой, а каждая из них составляет треть суммарной эффективной площади антенной системы 1. Каждую такую область, выполненную в виде или антенных элементов фазированной антенной решетки, соответствующей диаграммообразующей схемой, или выполненную в виде параболических зеркальных антенн с облучателями, можно привести к одной точке на плоскости раскрыва антенной системы 1, соответствующей ее фазовому центру.
Три парциальные апертуры антенной системы 1 формируют в пространстве парциальные диаграммы направленности с равными коэффициентами направленного действия, а их фазовые центры располагаются в фазовых центрах каждой из трех отдельных парциальных апертур.
В заявляемом моноимпульсном фазовом устройстве автоматического сопровождения по направлению используются три точки приема с номерами 0, 1 и 2, которые совпадают с фазовыми центрами трех парциальных апертур антенной системы 1, а их геометрическое положение на плоскости раскрыва антенной системы 1 иллюстрирует фиг.3. При этом за счет соответствующей геометрии расположения трех парциальных апертур антенной системы 1 фазовые центры располагаются в вершинах равностороннего треугольника, центр тяжести которого совпадает с началом координат плоскости раскрыва антенной системы 1, причем одна из сторон треугольника параллельна азимутальной плоскости.
Парциальные диаграммы направленности антенной системы 1 попарно формируют три пересекающиеся равносигнальные плоскости (плоскости синфазного приема по двум соседним парциальным диаграммам направленности), одна из которых совпадает с угломестной плоскостью, а каждая из двух других образуют с угломестной плоскостью двугранный угол, равный шестидесяти градусам, и они повернуты симметрично в противоположные стороны относительно угломестной плоскости. Три равносигнальные плоскости при пересечении образуют, в случае идеального конструктивного исполнения антенной системы 1, одно РСН антенной системы 1.
Номера точек приема 0, 1 и 2 (фиг.3) соответствуют первому, второму и третьему каналам приема, т.е. сигнал от i-й точки приема обрабатывается в (i+1)-м канале приема (с номерами 1, 2 и 3). Поток мощности П разделяется на три равные части ввиду равенства эффективной площади каждой идентичной парциальной апертуры А/3 и, таким образом, мощность полезного сигнала для каждого канала приема равна АП/3=Р0/3.
С первого, второго и третьего выходов антенной системы 1 три принимаемых сигнала от нулевой, первой и второй точек приема поступают соответственно на первый, второй и третий входы трехканального МПУ 2, где в трех приемных каналах осуществляется их усиление и согласованная частотно-временная обработка, а также нормирование автоматической регулировкой усиления.
Реализация МПУ 2 для заявляемого устройства не имеет специфики, отличающей его от известных типовых схем, используемых в моноимпульсной радиолокации [4].
В качестве примера на фиг.4 раскрыта возможная структура трехканального линейного МПУ 2, состоящая из трех цепей, каждая из которых состоит из последовательно соединенных смесителя (СМ) 5 и усилителя промежуточной частоты (УПЧ) 6, а также общих гетеродина (Г) 7 и блока автоматической регулировки усиления (АРУ) 8. На вторые (опорные) входы каждого из трех смесителей СМ 5.1, 5.2 и 5.3 подается сигнал гетеродина Г 7 для переноса обрабатываемых сигналов на промежуточную частоту. На вторые (управляющие) входы каждого из трех УПЧ 6.1, 6.2 и 6.3 подается сигнал управления их усилением от блока АРУ 8, который формируется на основе уровней выходных сигналов всех трех УПЧ 6.1-6.3, поступающих на три входа блока АРУ 8.
Блок АРУ 8, формирующий сигнал для моноимпульсной нормировки в каждом канале приема, также является типовым, а способы его реализации подробно изложены в ряде литературных источников, например [1-4].
Нормирование принимаемых сигналов в МПУ 2 осуществляется относительно уровня суммарного сигнала с выходов всех трех приемных каналов, что эквивалентно умножению каждого из трех принимаемых сигналов на нормирующий множитель. Свойства данного нормирующего множителя можно описывать исходя из модели инерционной автоматической регулировки усиления [5]. При этом в результате действия такой автоматической регулировки усиления принимаемые сигналы нормируются относительно медленно меняющегося процесса Q(Ps, PN, t), который зависит от мощностей всех выходных сигналов МПУ 2 в полосе приема: полезного PS и шумового РN.
Считаем, что операция нормирования, осуществляемая за счет автоматической регулировки усиления в МПУ 2, описывается нормирующим процессом Q(PS, PN, t), заменяющим его математическим ожиданием Q(PS, PN) [1, 5]. Это эквивалентно умножению мощности принимаемых сигналов на безразмерный постоянный коэффициент регулирования kА таким образом, что:
 ,
,


где q=Ps/PN - отношение сигнал-шум по мощности в полосе приема.
Сигнал на выходе каждого отдельного приемного канала МПУ 2 yi(Δ Ω, t) с учетом действия автоматической регулировки усиления запишем в виде аддитивной смеси полезного сигнала и шума

где i - номер точки приема, который принимает значения 0, 1 и 2, соответствующие номерам каналов приема 1, 2 и 3 (т.е. i+1); xi(Δ Ω, t) - полезный (информативный) сигнал; ξi(t) - внутриприемный шум i-го канала приема, мощность которого в полосе приема равна PN.
Полезный сигнал xi(Δ Ω, t) запишем в комплексном виде, из раскрывающего его временного процесса s[t), который одинаков для каждого из каналов приема, и информативной фазовой составляющей ехр{jφi(Δ Ω)}, определяемой угловым рассогласованием Δ Ω, т.е. в виде

При этом временной процесс полезного сигнала s(t) на выходе любого отдельного канала приема МПУ 2, ввиду разделения входной мощности Р0 на три равные части в антенной системе 1, следует представить следующим образом:

где Ps - суммарная мощность полезного сигнала в полосе приема, связанная с Р0 соотношением PS=ηP0 (η - коэффициент, характеризующий усилительные свойства МПУ 2); ψ(t) - мгновенная фаза полезного сигнала.
Выходные сигналы, соответствующие первому, второму и третьему выходам многоканального МПУ 2, поступают на первые входы соответствующих по номеру ФСР 3.1, 3.2 и 3.3, на вторые входы которых подаются выходные сигналы соответственно со второго, третьего и первого выходов МПУ 2. Таким образом, два входных сигнала (i+1)-го ФСР 3 соответствуют двум точкам приема:
- точке с номером i,
- следующей за ней точке (по направлению против часовой стрелки, см. фиг.3) с номером

Блоки ФСР 3 выполняют функцию комплексного перемножения двух входных сигналов с последующим выделением мнимой части результата перемножения, что эквивалентно фазовому детектированию при смещении фазы одного из входных сигналов на π/2 [5, с.162-172] или синусному фазовому детектированию, реализуемому фазовым дискриминатором [6, с.60-63].
Каждый из ФСР может быть реализован в соответствии со структурной схемой, приведенной на фиг.5 (нумерация элементов соответствует первому ФСР 3.1). Эта схема содержит перемножитель входных сигналов (П) 9, при этом сигнал, поступающий на его второй вход, смещается по фазе на π/2 в фазовращателе (ФВ) 10. С выхода перемножителя П 9 сигнал поступает на вход фильтра низких частот (ФНЧ) 11 для подавления высокочастотных составляющих и после соответствующей обработки - на выход ФСР 3.1. Частотные передаточные функций ФНЧ 11, входящих в ФСР 3, определяют полосу частот, в которой формируются выходные сигналы каждого из ФСР 3. На выходах каждого из трех ФСР 3.1, 3.2 и 3.3 формируются сигналы углового рассогласования ЛО относительно РСН в плоскостях, перпендикулярных плоскости пеленгования и проходящих через пары точек приема 0-1, 1-2, 2-0 (фиг.3). Каждый (i-й) сигнал углового рассогласования ui(Δ Ω, t), являющийся результатом преобразования, проводимого в ФСР 3.1-3.3, представляет собой сумму полезной (вида «сигнал-сигнал») uSi(Δ Ω, t) и мешающей флюктуационной uNi(Δ Ω, t) составляющих и описывается следующим образом:

где kp - коэффициент передачи ФСР 3; i=0, 1, 2 - индекс сигнала углового рассогласования, формируемого на выходе (i+1)-го ФСР 3; m - дополнительный индекс, связанный с индексом / соотношением (6).
Флюктуационный процесс uNi(Δ Ω, t) в силу принятого способа формирования сигналов углового рассогласования состоит из двух составляющих, обусловленных комбинационными флуктуациями:
- вида «сигнал-шум» uSNi(Δ Ω, t), образующиеся в результате перемножения полезного сигнала и шума, которые зависят как от углового рассогласования Δ Ω, так и от мощности полезного сигнала;
- вида «шум-шум» uNNi(t), образующиеся в результате перемножения шумовых процессов двух каналов приема, независимых ни от углового рассогласования Δ Ω, ни от мощности полезного сигнала.
Оба флюктуационных процесса uSNi(Δ Ω, t) и uNNi(t) на выходах каждого из ФСР 3 являются центрированными, а корреляция между ними отсутствует. Таким образом, математическое ожидание i-го сигнала углового рассогласования определяется только полезной составляющей uSi(Δ Ω, t) сигнала (7), которая при постоянстве мощности полезного сигнала зависит лишь от вектора углового рассогласования Δ Ω.
Учитывая, что, согласно (4), s(t)s*(t)=PS/3, а, в силу равенств (2) для коэффициента kА, справедливо PS/Q2(PS,PN)=kA, на основе (2) и (7) запишем

где Δφi(Δ Ω)=φi(Δ Ω)-φm(Δ Ω) - информативная разность фаз, в которую преобразуется вектор углового рассогласования Δ Ω в i-ом канале выделения углового рассогласования (соответствующего выходу i+1-го ФСР 3).
Существует связь между входным векторным угловым рассогласованием Δ Ω и информативными разностями фаз Δφ0, Δφ1 и Δφ2, соответствующими трем формируемым сигнала углового рассогласования. Для установления этой связи вектор углового рассогласования Δ Ω следует представить через три угловых рассогласования ЛО относительно РСН - θ0, θ1 и θ2, которым пропорциональны информативные разности фаз соответственно Δφ0, Δφ1 и Δφ2. Угловые рассогласования θ0, θ1 и θ2 отсчитываются в трех плоскостях, проекции которых на плоскость пеленгования показаны пунктирными линиями на фиг.3 и проходящими через пары точек приема 0-1, 1-2 и 2-0. Каждый из углов θ1, θ1, и θ2 представляет собой угловое рассогласование между проекциями направления на ЛО и РСН антенной системы 1 в соответствующей плоскости.
Следовательно, величина Δφi для i-го сигнала рассогласования (7) пропорциональна соответствующему i-ому угловому рассогласованию θi. При этом коэффициент данной пропорциональности μ=πd/λ определяется метрическими характеристиками антенной системы 1: диаметром окружности d, на которой расположены точки приема, и длиной волны λ. Величина μ как основной метрический показатель для заявляемого устройства и устройства-прототипа полагается одинаковой.
Из фиг.3 видно, что базы пеленгования для заявляемого устройства (отрезки между точками приема 0, 1 и 2) меньше диаметра окружности d в  раз, поэтому коэффициент пропорциональности μ должен быть уменьшен на соответствующую величину, а i-я информативная разность фаз будет равна
раз, поэтому коэффициент пропорциональности μ должен быть уменьшен на соответствующую величину, а i-я информативная разность фаз будет равна

Рассмотрим далее координатное преобразование, осуществляемое в антенной системе 1, в результате которого вектор Δ Ω представляется вектором трех угловых рассогласований θ=[θ0 θ1 θ2].
На фиг.6 показаны смещенные в начало координат проекции трех плоскостей X00Z, X10Z и X20Z на плоскость пеленгования X0Y, соответствующих парам точек приема 0-1, 1-2 и 2-0. Такое смещение возможно при рассматриваемом радиолокационном взаимодействии в дальней зоне, когда дальность до ЛО существенно превосходит диаметр d. Проекция пространства положения ЛО на плоскость пеленгования X0Y изображена точкой ЛОXY, аналогичные проекции пространственного положения ЛО, разделенные по плоскостям азимута X0Z и угла места Y0Z, изображены соответственно точками ЛОх и ЛОY.
Рассмотрим взаимное положение точки ЛОXY, и трех плоскостей X00Z, X10Z и X20Z, в которых выделяются угловые рассогласования ЛО относительно РСН. Каждая из этих трех плоскостей перпендикулярна плоскости пеленгования, при этом первая из них - X00Z параллельна азимутальной плоскости, а две другие - X10Z и X20Z образуют с плоскостью X00Z двугранный угол, равный шестидесяти градусам, и они повернуты симметрично в противоположные стороны относительно плоскости X00Z.
Рассмотрим проекции положения ЛО на три данные плоскости как соответствующие точки ЛОХ0, ЛОХ1 и ЛОХ2. Сопоставляя положение этих точек с положением точек ЛОX, ЛОY и проводя аналитические действия можно описать связь углов θ0, θ1 и θ2 с угловыми рассогласованиями Δα и Δβ как линейную комбинацию вида

где i=0, 1, 2, а коэффициенты весового суммирования определяются следующими выражениями:


Для сокращения записи выражение (10) удобно представить в матричной форме

где с - матрица коэффициентов координатного преобразования размеров 2×3, имеющая вид

Выражение (12) позволяет в явном виде определить систематическую (информативную) составляющую каждого из сигналов рассогласования (7), которая при постоянстве мощности полезного сигнала совпадает со своим математическим ожиданием, т.е. uSi(Δ Ω)=М{ui(Δ Ω, t)}. Вводя вектор-строку полезной составляющей формируемых ФСР 3.1-3.3 сигналов углового рассогласования us=[uS0 uS1 uS2], исходя из (8), (9) и (12), запишем


где kΔ - коэффициент пеленгационной чувствительности отдельного
канала выделения углового рассогласования ЛО относительно РСН, имеющий размерность В/град.
Выходные сигналы углового рассогласования первого 3-1 u0(Δ Ω, t), второго 3-2 u1(Δ Ω, t) и третьего 3-3 u2(Δ Ω, t) ФСР 3 поступают на входы соответственно первого 4-1, второго 4-2 и третьего 4-3 БУА 4, на выходах которых формируются управляющие воздействия ν0(t), ν1(t) и ν2(t) для изменения пространственной ориентации РСН антенной системы 1. Таким образом, управляющие воздействия на выходах первого, второго и третьего БУА 4 формируются пропорционально сигналам углового рассогласования соответственно u0(Δ Ω, t), u1(Δ Ω, t) и u2(Δ Ω, t).
Реализация каждого БУА 4 не имеет специфики, отличающей ее от известных типовых схем. В случае фазированной антенной решетки, например, изменение пространственного положения РСН антенной системы 1 может осуществляться с помощью фазовращательных звеньев, описанных в [3, с.86-93].
Динамические характеристики каждого БУА 4 описываются его частотной передаточной функцией W(jω), совпадающей с аналогичной функцией для устройства-прототипа. Функция W(jω) отражает динамические характеристики управления антенной системой в соответствии с общим представлением передаточной функции разомкнутой части автоматической системы [6, с.48].
При этом коэффициенты передачи БУА 4.1-4.3, характеризующие добротность отдельного следящего контура заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению, равны между собой и имеют размерностью град./В. Данная размерность коэффициента передачи отдельного БУА 4 и, соответственно, размерность частотной передаточной функцией W(jω), определяются тем, что каждый БУА 4 связывает выходную регулируемую величину - угловое положение РСН с входным электрическим сигналом рассогласования.
Представляя в виде вектора-строки управляющие воздействия v=[ν0 ν1 ν2], можно описать связь этого вектора с вектором полезной составляющей сигналов рассогласования uS (14) на основе простого динамического уравнения

где uS(jω) - фурье-образ вектора uS(t), являющего функцией от изменяющегося во времени углового рассогласования Δ Ω(t); v(jω) - фурье-образ вектора v(t) как функции времени.
Формируемые БУА 4.1-4.3 управляющие воздействия ν0(t), ν1(t) и ν2(t) представляют собой временные процессы с размерностью град./В, которые с выходов первого, второго и третьего БУА 4 поступают соответственно на первый, второй и третий входы антенной системы 1. Данные три входа антенной системы 1 являются входами управления положением ее РСН в пространстве, в результате чего под воздействием процессов ν0(t), ν1(t) и ν2(t) происходит изменение ориентации РСН антенной системы 1 до равенства нулю этих управляющих воздействий. Таким образом замыкается контур автоматического сопровождения по направлению в заявляемом устройстве.
Положение осей управления антенной системой 1 показано на фиг.7. Сопоставляя фиг.6 и фиг.7, нетрудно видеть, что оси управления антенной системой 1 находятся в плоскостях, в которых отсчитываются угловые рассогласования θ0, θ1 и θ2, т.е. - в плоскостях X00Z, X10Z и X20Z.
Фиг.7 дает иллюстрацию того, каким образом три управляющих воздействия ν0, ν1 и ν2, прилагаемых к антенной системе 1 по осям 0Х0, 0Х1 и 0Х2, могут быть приведены к трем соответствующим управляющим воздействиям по азимуту - ν0X, ν1x и ν2x, и углу места - ν0Y, ν1Y и ν2Y. При этом положение РСН антенной системы 1 в азимутальной плоскости α0 определяется суммой трех проекций управляющих воздействий на ось 0Х: ν0x+ν1x+ν2X, а в угломестной плоскости β0 - соответственно на ось 0Y: ν0Y+ν1Y+ν2Y. Согласно построению, представленному на фиг.7, а также выражению (11), определяющему коэффициенты координатного преобразования, осуществляемого в заявляемом устройстве, запишем


что в матричной форме имеет вид

Подставляя в последнее выражение уравнение (17), связывающее фурье-образы векторов v(jω) и uS(jω), раскрывая последний на основе (14), получим матричное динамическое уравнение, которое описывает взаимную связь фурье-образов задающего воздействия Ω(jω) и регулируемой величины Ω0(jω):

Последнее уравнение можно упростить, вычислив матричное произведение сст с использованием (11), при этом сст=1,5I2, где I2 - единичная матрица второго порядка. Этот результат, будучи примененным к (18), свидетельствует об отсутствии перекрестных связей и, соответственно, взаимного влияния процессов автоматического сопровождения по двум ортогональным плоскостям - азимута и угла места.
Таким образом, учитывая диагональный вид матрицы сст и независимость процессов автоматического сопровождения по азимуту и углу места, уравнение (18) можно привести к виду, описывающему связь регулируемой величины с задающим воздействием в замкнутой автоматической системе:

где

- безразмерная частотная передаточная функция замкнутой системы автоматического сопровождения, реализуемая заявляемым моноимпульсным фазовым устройством автоматического сопровождения по направлению в одной плоскости - например, азимутальной или угломестной.
Коэффициент КΔ в (20) характеризует пеленгационную чувствительность заявляемого устройства по угловому рассогласованию ЛО относительно РСН в одной плоскости (азимутальной или угломестной) и выражается, исходя из (14), (15) и (18), следующим образом

Аналогом коэффициента КА в устройстве-прототипе является коэффициент передачи дискриминатора по угловому рассогласованию [8].
Для сравнения заявляемого устройства и устройства-прототипа по основному функциональному показателю, раскрывающему технический результат изобретения, необходимо равенство динамических характеристик двух данных устройств. Обеспечение этого равенства при идентичных для обоих случаях частотных передаточных функциях W(jω) сводится к равенству коэффициентов КΔ заявляемого устройства и устройства-прототипа.
Из сопоставления динамических характеристик заявляемого устройства и устройства-прототипа, характеризуемых в обоих случаях частотной передаточной функцией H(jω) (20), нетрудно видеть, что различие динамических характеристик обусловливается коэффициентами КΔ, которые отличаются друг от друга для двух сравниваемых устройств. Из выражения (21) следует, что коэффициент КΔ для заявляемого устройства в  раз больше по сравнению с данным коэффициентом для устройства-прототипа, который определен в [8].
раз больше по сравнению с данным коэффициентом для устройства-прототипа, который определен в [8].
Таким образом, равные динамические характеристики заявляемого устройства и устройства-прототипа обеспечиваются при выборе значения одного из коэффициентов - kA или kp для заявляемого устройства в  меньше по сравнению с его значением в устройстве-прототипе, т.е.
меньше по сравнению с его значением в устройстве-прототипе, т.е.

При выполнении последнего равенства частотные передаточные функции H(jω) заявляемого устройства и устройства-прототипа совпадают между собой, поэтому в обоих случаях равна и эквивалентная полоса частот Δfн, характеризующая замкнутую систему автоматического сопровождения по направлению ЛО в одной плоскости (азимутальной или угломестной) следующим образом [6]

Для доказательства технического результата изобретения найдем дисперсию флюктуационной погрешности автоматического сопровождения по направлению в заявляемом устройстве.
Для этого, прежде всего, определим вектор-строку помехи, обусловленной шумами, по направлению на ЛО Ξ(t)=[αN(t) βN(N)], которая приведена к входу заявляемого устройства по задающему воздействию (с размерностью задающего воздействия - как для автоматической следящей системы) и действует в виде шумовых флюктуации по угловым координатам азимута αN(t) и угла места βN(t).
Данная помеха порождается флюктуационными составляющими трех выходных сигналов ФСР 3.1-3.3. Эти три флюктуационные составляющие преобразуются в три случайные управляющие воздействия на выходах БУА 4.1-4.3, что приводит к флюктуациям пространственного положения РСН антенной системы 1.
Дальнейшие рассуждения проведем, ограничиваясь случаем нулевого рассогласования ЛО относительно РСН (Δα=Δβ=0) как общепринятым [1] в методике нахождения флюктуационной погрешности автоматической следящей системы. Равенство Δ Ω=0 позволяет опустить зависимости от углового рассогласования в флюктуационных процессах на выходах ФСР 3.1-3.3, которые обозначим в виде вектора строки uN(t)=[uN0(t) uN1(t) uN2(t)].
Исходя из выражения (17), определяющего связь регулируемой величины Ω0 с вектором управляющих воздействий для РСН антенной системы 1, и пользуясь правилом приведения мешающего воздействия на вход замкнутой автоматической системы [6, с.47], запишем

Выражение (24) использует коэффициент КΔ, определенный в (21), и основывается на безынерционности преобразования углового рассогласования в выходные сигналы ФСР 3.1-3.3. Последнее обстоятельство связано с тем, что полоса частот сигналов углового рассогласования на выходах ФСР 3.1-3.3, как и в случае устройства прототипа, полагается существенно шире эквивалентной полосы частот замкнутых контуров автоматического сопровождения по угловым координатам.
Статистические характеристики приведенного к входу вектора помехи (24) опишем корреляционной матрицей вида

где  - корреляционная матрица трех флюктуационных процессов на выходах ФСР 3.1-3.3.
- корреляционная матрица трех флюктуационных процессов на выходах ФСР 3.1-3.3.
Ранее было показано, что каждый из флюктуационных процессов uNi(Δ Ω,t) на выходах ФСР 3.1-3.3 состоит из двух независимых между собой составляющих вида «сигнал-шум» uSNi(Δ Ω, t) и вида «шум-шум» uNNi(t), поэтому с учетом равенства Δ Ω=0 соответствующим образом можно представить и корреляционную матрицу ВΔ(τ):

где BSN(τ) - корреляционная матрица процессов uSNi(t), сведенных в вектор-строку uSN(t)=[uSN0(t) uSN1(t) uSN2(t)]; ВNN(τ) - корреляционная матрица процессов uNNi(t), сведенных в вектор-строку uNN(t)=[uNN0(t) uNN1(t) uNN2(t)].
Аналитические выкладки для изобретения, связанные с нахождением матриц BSN(τ) и ВNN(τ), проведем аналогично случаю устройства-прототипа [8] на основе комплексного квадратурного представления как временного полезного сигнала s(t)=sc(t)+jss(t) (определенного в (4)), так и шума на выходе каждого из каналов МПУ 2 ξi(t)=ξic(t)+jξis(t), где индексами «с» и «s» обозначены соответственно косинусная и синусная квадратурные составляющие процессов s(t) и ξi(t).
Будем считать, что частотные характеристики каналов приема МПУ 2 в заявляемом устройства и прототипе идентичны, а также идентичны (с точностью до постоянного множителя) спектральные характеристики полезного сигнала в обоих случаях.
Статистические свойства каждой из введенных в рассмотрение квадратурных составляющих опишем, используя их автокорреляционные функции:

- для отдельной квадратурной составляющей полезного сигнала и

- для отдельной квадратурной составляющей шума, считая, что все три флюктуационных процесса ξ0(t), ξ1(t) и ξ2(t)эргодические и обладают одинаковыми статистическими характеристиками.
Исходя из рассмотренного выше разделения мощности полезного сигнала на три равные части в антенной системе 1 и учитывая, что мощность каждой квадратурной составляющей вдвое меньше мощности процесса, представленного в комплексной форме, начальные значения автокорреляционных функций ВNC(τ) и BSC(τ) при τ=0 соответственно равны: BNC(0)=PN/2 и BSC(0)=PS/6.
Раскрывая временные и энергетические сомножители функций BSC(τ) и ВNC(τ) для заявляемого устройства, запишем


Определим матрицы BSN(τ) и ВNN(τ) на основе представления (3) для входных сигналов МПУ 2 заявляемого устройства и описания операции, проводимой каждым ФСР 3 (7). Для этого удобно рассматривать элементы векторов uSN(t) и uNN(t) в виде произведений соответствующих квадратурных составляющих sc(t), ss(t), ξic(t), ξis(t), опуская в их обозначениях зависимости от времени, а также - зависимости от мощностей в Q(Ps, PN)=Q, т.e:


Проводя последовательность аналитических действий для получения корреляционных матриц BSN(τ) и ВNN(τ), исходя из (30) и (31) и используя при этом выражения (27) и (28), описывающие автокорреляционные функции ВNC(τ) и BSC(τ), запишем


где I3 - единичная матрица третьего порядка, r - матрица нормированных корреляционных моментов (при τ=0) для флюктуации вида «сигнал-шум» на выходах ФСР 3.1-3.3, имеющая размеры 3×3 и равная

Наличие отличных от нуля междиагональных элементов в матрице BSN(τ) говорит о взаимной корреляции между флюктуациями вида «сигнал-шум» на выходах трех ФСР 3.1-3.3. Тем не менее, далее будет показано, что с учетом данного обстоятельства флюктуации вида «сигнал-шум» в равной мере влияют на флюктуационную погрешность автоматического сопровождения по направлению как в заявляемом устройстве, так и в прототипе.
Раскрывая сумму корреляционных матриц (26) на основе (32) и (33) и подставляя полученный результат в (25), запишем выражение для корреляционной матрицы помехи по направлению на ЛО, приведенной к входу заявляемого устройства по задающему воздействию, в виде

Вычисляя матричное произведение crcт по формулам (11) и (34), получим crcт=2,25I2, тогда, раскрывая в (35) корреляционные функции BNC(τ) и BSC(τ) на основе (29) и учитывая приведенные ранее соотношения: ccT=1,5I2,  ,
,  ,
,  , перепишем (35) в виде
, перепишем (35) в виде

Диагональный вид матрицы ВΞ(τ) свидетельствует об отсутствии взаимной корреляции помехи по направлению на ЛО между плоскостями азимута и угла места. Равенство диагональных элементов данной матрицы означает, что статистические характеристики приведенных к входу заявляемого устройства помех по азимуту αN(t) и по углу места βN(t) совпадают друг с другом. Учитывая при этом тождественность динамических характеристик заявляемого устройства по двум ортогональным плоскостям, можно заключить, что флюктуационные погрешности автоматического сопровождения по азимуту и по углу места взаимно независимы, а их дисперсии равны между собой. Поэтому далее будем рассматривать только один из диагональных элементов матрицы ВΞ(τ), которым является автокорреляционная функция ВΞ(τ) для помехи по направлению на ЛО в одной плоскости (азимутальной или угломестной).
Исходя из полученного для заявляемого устройства выражения (36), описывающего автокорреляционную функцию ВΞ(τ), перейдем к спектральной плотности флюктуации SΞ(0) для помехи αN(t) (либо βN(t)) на нулевой частоте за счет интегрирования функции ВΞ(τ) в пределах (-∞, ∞). Интегрируя в пределах (-∞, ∞) автокорреляционную функцию ВΞ(τ), перейдем к спектральной плотности флюктуации SΞ(0)=SΞ(ω=0) для помехи αN(t) (либо βN(t)) на нулевой частоте. Воспользовавшись (36), запишем

где ΔfSN и ΔfNN - эквивалентные полосы частот флюктуации вида «сигнал-шум» и «шум-шум» соответственно, определяемые следующими соотношениями:

Последние две формулы отражают известную [9, 10] связь времени корреляции и эквивалентной полосы белого шума стационарного случайного процесса.
Отношение ΔfNN/ΔfSN можно преобразовать на основе равенства 4π2Δf2=-b''(0) [3, 10], определяющего связь между второй производной нормированной корреляционной функции b''(τ) при τ=0 и эквивалентной полосой частот Δf. Используя данное равенство и вводя величину κ=ΔfNN/ΔfSN, запишем

где ΔfS и ΔfN - эквивалентные полосы частот соответственно для полезного сигнала и шума, действующих на выходе отдельного канала приема МПУ 2.
Значение отношения ΔfS/ΔfN, используемого в (39), ограничено в пределах 0<ΔfS/ΔfN<1, поскольку полоса частот шума обычно шире полосы частот входного полезного сигнала, отраженного от ЛО. Следовательно, согласно (39) величина κ может находиться в диапазоне значений от 1 до  .
.
В качестве одной из типовых ситуаций можно рассматривать согласованный прием временного полезного сигнала, при котором  (в случае гауссовой аппроксимации это равенство является точным [5]), что определяет значение
(в случае гауссовой аппроксимации это равенство является точным [5]), что определяет значение  . Три указанных значения κ: 1,
. Три указанных значения κ: 1,  и примем как опорные для иллюстрации технического результата, достигаемого в заявляемом моноимпульсном фазовом устройстве автоматического сопровождения по направлению.
и примем как опорные для иллюстрации технического результата, достигаемого в заявляемом моноимпульсном фазовом устройстве автоматического сопровождения по направлению.
Дисперсия флюктуационной погрешности автоматического сопровождения ЛО по одной угловой координате (например, по азимуту или по углу места) может быть найдена исходя из общего известного [1, 6] выражения, описывающего дисперсию флюктуационной погрешности работы замкнутой автоматической системы

где S(ω) - спектральная плотность флюктуаций, приведенных к входу данной системы. Следует отметить, что приближение в (40) является весьма точным, поскольку для реальных радиолокационных систем автоматического сопровождения величина S(ω) практически постоянна в пределах полосы ΔfH [1].
Используя выражение (40) для нахождения дисперсии флюктуационной погрешности автоматического сопровождения ЛО по одной угловой координате (по азимуту - Dα или по углу места - Dβ), учитывая при этом независимость и равенство статистических характеристик приведенных к входу заявляемого устройства помех αN(t) и βN(t), запишем выражение для равных друг другу дисперсий Dα и Dβ:

Величина Dl в (41) является искомой дисперсией флюктуационной погрешности автоматического сопровождения ЛО по одной угловой координате, которая отражает основной функциональный точностной показатель качества работы заявляемого моноимпульсного фазового устройства автоматического сопровождения по направлению. На основе данной величины, а также аналогичной ей дисперсии, определенной выражением (1) для устройства-прототипа, можно провести сравнение точности автоматического сопровождения по направлению для двух рассматриваемых устройств с целью количественного подтверждения технического результата изобретения.
Количественное сравнение флюктуационной погрешности автоматического сопровождения ЛО между случаями заявляемого устройства и устройства-прототипа возможно только при обеспечении равенства динамических характеристик двух данных устройств, что в общем виде (на уровне обобщенной замкнутой автоматической системы) подробно описано в [1, 6]. Для проводимого сравнения это означает выполнение равенства (22), при котором величина ΔfH одинакова для заявляемого устройства и устройства-прототипа.
Для количественного описания технического результата изобретения рассмотрим отношение дисперсий погрешности автоматического сопровождения ЛО по одной угловой координате (например, по азимуту, либо по углу места) D1/D0 для заявляемого устройства и прототипа.
Воспользовавшись (1) и (41), запишем в конечном виде отношение данных дисперсий

Представляя полученное отношение (42) графически (фиг.8), можно увидеть ту область отношений сигнал-шум, в которой заявляемое устройство обладает преимуществом в точности автоматического сопровождения ЛО по направлению по сравнению с прототипом, - область малых отношений сигнал-шум, меньших трех-пяти (по амплитуде). При этом, как следует из (42) и фиг.8, дисперсия флюктуационной погрешности автоматического сопровождения ЛО по одной угловой координате может уменьшаться до двух раз в области малых отношений сигнал-шум.
Влияние частотных свойств МПУ 2, сведенных к одному коэффициенту κ (39), на отношение D1/D0 иллюстрирует фиг.8, где представлены следующие кривые: сплошная - для случая согласованного приема и значения 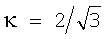 , две пунктирные - для левой и правой границ графика зависимости D1/DQ=f(q), соответствующие значениям
, две пунктирные - для левой и правой границ графика зависимости D1/DQ=f(q), соответствующие значениям  и κ=1. Из построенных кривых видно, что при различных значениях коэффициента κ основной характер зависимости D1/D0=f(q) не меняется, при этом коэффициент к играет роль параметра смещения в данной зависимости.
и κ=1. Из построенных кривых видно, что при различных значениях коэффициента κ основной характер зависимости D1/D0=f(q) не меняется, при этом коэффициент к играет роль параметра смещения в данной зависимости.
Следует подчеркнуть, что именно в области малых отношений сигнал-шум снижение флюктуационной погрешности автоматического сопровождения ЛО по угловым координатам имеет наибольшее практическое значение, поскольку здесь флюктуационная погрешность становится основным фактором, ограничивающим эффективность моноимпульсного фазового устройства автоматического сопровождения по направлению и ТТХ радиолокационной системы в целом.
Таким образом, достигаемый технический результат от использования предлагаемого моноимпульсного фазового устройства автоматического сопровождения по направлению, в отличие от прототипа, заключается в повышении точности автоматического сопровождения ЛО по направлению в условиях малых отношений сигнал-шум.
Повышение точности моноимпульсного фазового устройства автоматического сопровождения по направлению в области малых отношений сигнал-шум эквивалентно изменению его тактико-технических характеристик (ТТХ):
- увеличению дальности действия, ограниченной заданной вероятностью срыва слежения за ЛО по угловым координатам;
- уменьшению площади рассеяния ЛО, который может автоматически сопровождаться по направлению;
- уменьшению мощности облучения ЛО, необходимой для автоматического сопровождения ЛО по направлению с заданными показателями качества (точности, вероятности срыва слежения и аналогичными);
- улучшению показателей качества работы всей локационной системы, содержащей моноимпульсное фазовое устройство автоматического сопровождения по азимуту и углу места, при энергетических флюктуациях полезного сигнала.
Реализация устройства не вызывает практических трудностей, так как вновь вводимые блоки представляют собой завершенные функциональные узлы, выполняемые на основе известных и широко распространенных радиотехнических элементов, выпускаемых отечественной промышленностью.
Источники информации
1. Вопросы статистической теории радиолокации / в 2 т. Под ред. Г.П.Тартаковского. М.: Сов. радио, т.1, 1963. т.2, 1964.
2. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981.
3. Коростелев А.А. Пространственно-временная теория радиосистем. М.: Радио и связь, 1987.
4. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: Радио и связь, 1984.
5. Евсиков Ю.А., Чапурский В.В. Преобразование случайных процессов в радиотехнических устройствах. М.: Высшая школа, 1977.
6. Радиоавтоматика / Под ред. В.А.Бесекерского. М.: Высшая школа, 1989.
7. Фельдман Ю.И., Гидаспов Ю.Б., Гомзин В.Н. Сопровождение движущихся целей. М.: Сов. радио, 1978.
8. Павлов B.C., Турнецкий Л.С. Специфика флюктуационной погрешности моноимпульсной фазовой системы автоматического сопровождения по направлению. Труды Всеармейской научно-практической конференции «Инновационная деятельность в Вооруженных силах РФ», СПб, ВАС, 2007.
9. Вайнштейн Л.А., Зубаков В.Д. Выделение сигналов на фоне случайных помех. М.: Сов. радио, 1960.
10. Левин Б.Р. Теоретические основы статистической радиотехники. Т.1. М.: Сов. радио, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| МОНОИМПУЛЬСНЫЙ ФАЗОВЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2364882C2 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| Пеленгатор источника радиоизлучения с широкоугольным коническим сканированием | 2016 |
|
RU2616597C1 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ | 2003 |
|
RU2249232C2 |
Изобретение относится к области радиолокации и предназначено для автоматического сопровождения локационного объекта (ЛО), являющегося источником радиоизлучения или отражения радиоволн, одновременно в двух плоскостях. Устройство содержит антенную систему, многоканальное моноимпульсное приемное устройство (МПУ), первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам антенной системы; три цепи последовательно соединенных формирователя сигнала рассогласования (ФСР) и блока управления антенной (БУА). Выходы первого, второго и третьего БУА соединены соответственно с первым, вторым и третьим входами антенной системы. Первые входы первого, второго и третьего ФСР соединены соответственно с первым, вторым и третьим выходами МПУ, а вторые входы первого, второго и третьего ФСР соединены соответственно со вторым, третьим и первым выходами МПУ. Антенная система выполнена из трех примыкающих друг к другу областей антенных элементов, фазовые центры которых расположены в вершинах равностороннего треугольника, помещенного в плоскость раскрыва антенной системы, при этом одна из сторон треугольника параллельна азимутальной плоскости, а выходы фазовых центров являются соответствующими выходами антенной системы. Достигаемый технический результат - повышение точности автоматического сопровождения ЛО по направлению в условиях малых отношений сигнал-шум. 8 ил.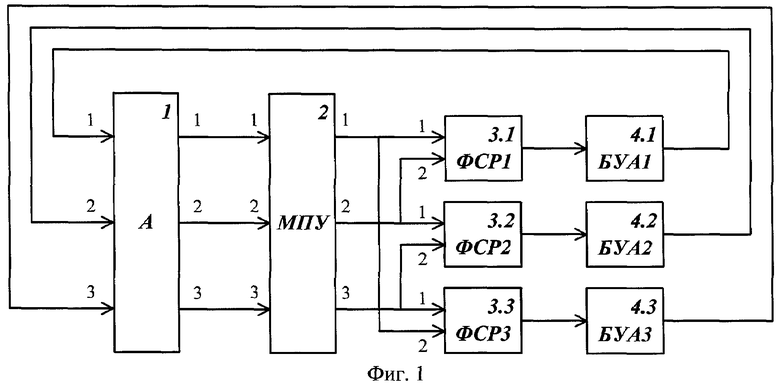
Моноимпульсное фазовое устройство автоматического сопровождения по направлению, содержащее антенную систему, апертура которой состоит из идентичных отдельных непересекающихся областей антенных элементов равной эффективной площади, многоканальное моноимпульсное приемное устройство, входы которого подключены к соответствующим выходам антенной системы, первую и вторую цепи, состоящие из последовательно соединенных соответствующих формирователя сигнала рассогласования и блока управления антенной системой, при этом выходы первого и второго блоков управления антенной системой соединены соответственно с первым и вторым входами антенной системы, а первые входы первого и второго формирователей сигнала рассогласования соединены соответственно с первым и вторым выходами многоканального моноимпульсного приемного устройства, отличающееся тем, что в него введены третья цепь, состоящая из последовательно соединенных третьего формирователя сигнала рассогласования и третьего блока управления антенной системой, выход которого соединен с третьим входом антенной системы, при этом первый вход третьего формирователя сигнала рассогласования подключен к третьему выходу многоканального моноимпульсного приемного устройства, а первый, второй и третий выходы многоканального моноимпульсного приемного устройства соединены соответственно со вторыми входами третьего, первого и второго формирователей сигнала рассогласования, причем антенная система выполнена из трех примыкающих друг к другу областей антенных элементов, фазовые центры которых расположены в вершинах равностороннего треугольника, помещенного в плоскость раскрыва антенной системы, при этом одна из сторон треугольника параллельна азимутальной плоскости, а выходы фазовых центров являются соответствующими выходами антенной системы.
| ЛЕОНОВ А.И., ФОМИЧЕВ К.И | |||
| Моноимпульсная радиолокация | |||
| - М.: Радио и связь, 1984, с.68, рис.4.2 | |||
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2255353C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| ПРИЕМНОЕ УСТРОЙСТВО ДЛЯ МОНОИМПУЛЬСНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2287171C1 |
| US 6498582 B1, 24.12.2002 | |||
| EP 1167994 A2, 02.01.2002 | |||
| ДВУХКОЛЕСНАЯ ТЕЛЕЖКА ДЛЯ ТРАНСПОРТИРОВАНИЯ ГРУЗОВ В ТАРЕ | 1935 |
|
SU52491A1 |
| Способ определения пористости древесины | 1980 |
|
SU1067396A1 |

