Изобретение относится к радиотехнике, а именно к методам и средствам радиотехнического обнаружения запрещенных к проносу на охраняемую территорию металлических предметов, скрытых под одеждой человека. Традиционно материалы этого направления радиотехники размещаются в разделах «металлодетекторы» (МД) и «методы и средства металлодетектирования» (методы и средства МД).
Конкретизируем рассматриваемые ниже методы и средства МД. Во-первых, основное внимание уделим арочным МД. Входящие в их состав излучающие (ИК) и приемные (ПК) катушки определяют особенности пространственной обработки сигналов. Во-вторых, среди различных вариантов зондирующего сигнала (ЗС), определяющих особенности временной обработки отраженных сигналов, ограничимся рассмотрением периодической последовательности импульсов с высокой скважностью, имеющих малую длительностью и широкий спектр. В литературе методы МД, использующие такой ЗС, принято называть импульсными методами МД.
Таким образом, аналогами предложенного изобретения являются арочно-импульсные (АИ) методы и средства МД, особенности функционирования которых изложены в источниках информации [1; 2; 3; 4; 5].
Недостаток аналогов состоит в их низкой помехозащищенности по отношению к внешней помехе, создаваемой удаленными источниками.
Среди аналогов в качестве прототипа выберем такой АИ метод МД, арочная конструкция которого содержит одну ИК, расположенную в центре основания арочного проема, и две ПК, расположенные на одинаковой высоте в левой и правой арочных стойках соответственно [3]. В прототипе из выходных сигналов S1(t) и S2(t) первой (ПК1) и второй (ПК2) катушек соответственно формируется градиентометрический сигнал S12(t)=S1(t)-S2(t), который в дальнейшем подвергается частотной фильтрации и временной обработке. Новизна предложенного изобретения состоит в совершенствовании именно пространственной обработки сигналов, учитывая реально существующую факторизацию пространственно-временной обработки сигналов. При этом конкретный вид временной обработки в прототипе является непринципиальным и мы выберем ее традиционной для робастных локационных устройств [6]. Она заключается в выделении мгновенных значений амплитуды A(t) сигнала S12(t), формировании плавающего порога P(t) путем усреднения A(t) на интервале (t-T;t), где Т - время, отводимое для мониторинга одного лица в потоке, а носителем запрещенного предмета определим лицо, пересекающее арочный проем в момент превышения A(t) порога P(t).
Важно отметить, что импульсы ЗС проникают в выходной сигнал каждой из ПК прототипа, причем их спектры совпадают со спектрами выделяемых полезных импульсов (отраженных металлическим предметом), а также наблюдается перекрытие во времени импульсов ЗС и полезных импульсов. Оба указанных эффекта являются следствием инерционности ИК, значительно превышающей эквивалентную электродинамическую инерционность запрещенных металлических предметов, что не позволяет в каждом из выходных сигналов ПК1 и ПК2 методами временной обработки сигналов эффективно нейтрализовать указанную внутреннюю помеху в виде импульсов ЗС и выделить в них полезную составляющую. Однако благодаря градиентометрическому соединению ПК1 и ПК2, которое можно рассматривать как частный случай пространственной обработки, такая нейтрализация, по крайней мере, частичная, повышающая чувствительность прототипа, достигается в сигнале S12(t).
В то же время, прототипу свойственен тот же недостаток, что и аналогам, а именно низкая помехозащищенность по отношению к внешним помехам, создаваемых удаленными источникам радиоизлучения. Сказанное объясняется тем, что при широком спектре внешней помехи разность хода волны от удаленного источника радиоизлучения до ПК1 и до ПК2 порождает заметный фазовый сдвиг между их выходными сигналами, который препятствует нейтрализации внешней помехи в градиентометрическом сигнале S12(t).
Целью изобретения является нейтрализация излучений от дальних источников и повышение тем самым эффективности обнаружения запрещенных металлических предметов методами пространственной обработки сигналов на базе усовершенствованной конструкции арочного МД.
Для достижения поставленной цели в способе обнаружения запрещенных предметов и идентификации их носителей в потоке людей, поочередно пересекающих проем арочного МД, в котором осуществляется излучение ЗС в виде последовательности коротких импульсов с высокой скважностью, прием отраженного сигнала парой ПК, формирование из выходных сигналов S1(t), S2(t) первой и второй ПК, установленных на высоте h12 в левой и правой арочных стойках соответственно, градиентометрического сигнала S12(t)=S1(t)-S2(t), частотная фильтрация и временная селекция арочного сигнала SΣ(t) с последующим выделением мгновенных значений его амплитуды A(t), формирование плавающего порога P(t) путем усреднения A(t) на интервале (t-T;t), где Т - время, отводимое для мониторинга одного лица в потоке, а носителем запрещенного предмета определяется лицо, пересекающее арочный проем в момент превышения A(t) порога P(t), ДОПОЛНИТЕЛЬНО в левую и правую арочные стойки на высоте h34 устанавливаются соответственно третья и четвертая ПК, из выходных сигналов которых S3(t), S4(t) формируется градиентометрический сигнал S34(t)=S3(t)-S4(t), ПРИЧЕМ в качестве арочного сигнала SΣ(t) используется разница SΣ(t)=S12(t)-S34(t).
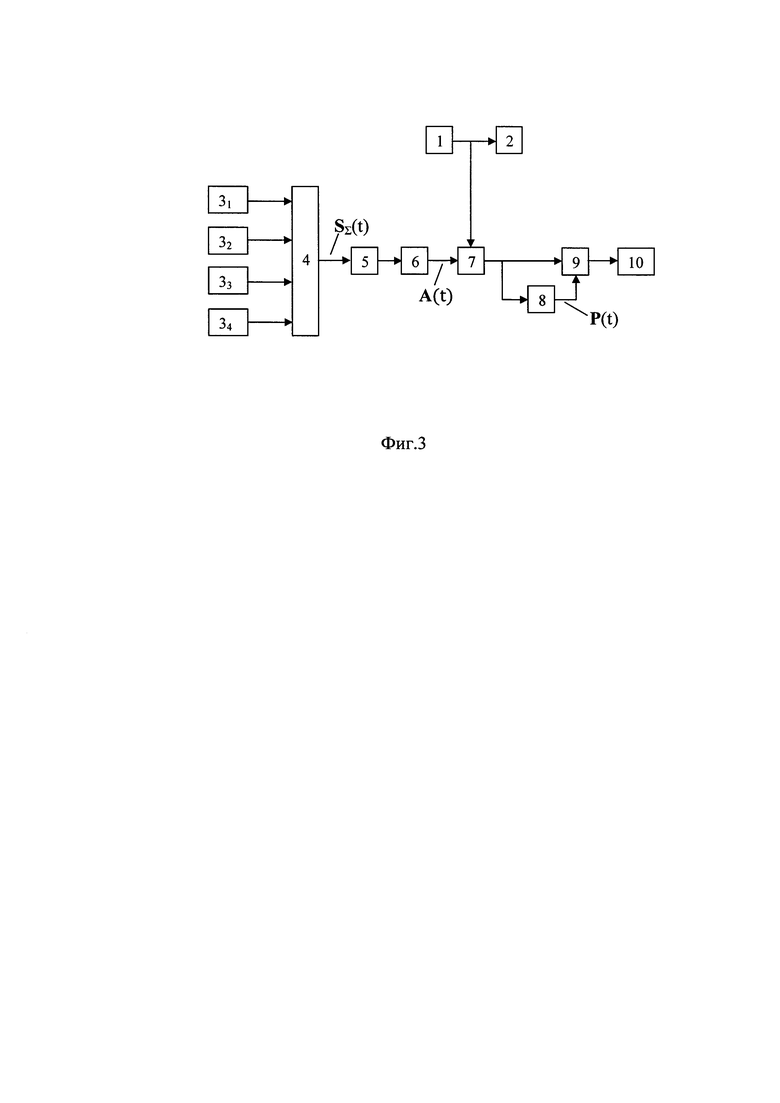
На фиг. 1, фиг. 2 изображена арочная конструкция МД с встроенными в нее ИК и четырьмя приемными катушками ПК1÷ПК4, причем на фиг. 1 оси ПК1÷ПК4 параллельны оси X, а на фиг. 2 - оси Y. На фиг. 3 изображена функциональная схема МД, реализующая предложенный способ, элементы 1÷10 которой несут следующее техническое содержание: 1 - генератор тактовых импульсов, возбуждающих ИК; 2 - ИК; 31÷34 - ПК1÷ПК4; 4 - арифметическая схема; 5 - частотный фильтр; 6 - амплитудный детектор; 7 - схема стробирования полезных импульсов; 8 - схема формирования порога; 9 - схема сравнения; 10 - устройство звуковой или световой сигнализации о появлении носителя запрещенного предмета.
Сущность предложенного изобретения очевидна из всего вышеизложенного и приведенной схемы фиг. 1. Новизна предложенного изобретения заключается в совершенствовании прежде всего пространственной обработки сигналов антенной решетки из ПК1÷ПК4, результатом которой является арочный сигнал SΣ(t).
Докажем преимущество предложенного способа перед прототипом. Выразим выходные сигналы Si(t) приемных катушек ПК1÷ПК4 через их парциальные составляющие:

где αi - полезные сигналы, порождаемые искомым металлическим предметом при появлении его в создаваемой ПК1÷ПК4 зоне обнаружения; ξi - внутренняя помеха, порождаемая импульсами ЗС; ηi - внешняя помеха, порождаемая удаленным источником радиоизлучения. Выражение для арочного сигнала

где 
с учетом (1) примет вид

где 


Согласно (6), суммарная внутренняя помеха ξΣ в арочном сигнале SΣ(t) будет в значительной степени нейтрализована ввиду малости каждой из стоящих в скобках величин - (ξ1-ξ2) и (ξ3-ξ4) при соблюдении требуемой идентичности катушек ПК1÷ПК4, симметричности их расположения относительно ИК и правильным, т.е. вдоль оси X, направлением их осей при вертикальном, т.е. вдоль оси Y, направлении оси ИК (фиг. 1).
Получим выражение для суммарной внешней помехи ηΣ от удаленного источника радиоизлучения гармонического сигнала с длиной волны λ, напряженность магнитного поля которого в окрестности арочного проема выражается плоской волной:

где 

Н - любая из координатных составляющих напряженности в начале координат: Hx, Hy, Hz. Ввиду того, что арочный проем располагается в картинной плоскости XY (z=0), множитель εz(z) равен единице и его в дальнейшем можно не учитывать. Введем следующие обозначения:
 где D - ширина арочного проема (вдоль оси X). Тогда парциальные помеховые сигналы ηi катушек ПК1÷ПК4 примут вид:
где D - ширина арочного проема (вдоль оси X). Тогда парциальные помеховые сигналы ηi катушек ПК1÷ПК4 примут вид:

а суммарная внешняя помеха ηΣ, согласно (7) и (12), примет вид

где H=Hx для арочного проема фиг. 1 и H=Hy для арочного проема фиг. 2.
Оценим эффективность нейтрализации внешней помехи, для чего сравним (13) с выражением для внешней помехи, т.е. до введения дополнительных ПК3 и ПК4, согласно (7):

Для этого введем коэффициент подавления внешней помехи:

Подставляя в (15) выражения, вытекающие из (9), (11)
получим 

Преобразуем (17):

и учтем малость произведения ky(h34-h12)=kyh. Тогда модуль γ получается равным

где значение волнового числа ky (впрочем, как и kx, и kz) лежит в диапазоне 0÷(2π/λ), в зависимости от направления на удаленный источник. Следовательно, модуль коэффициента подавления не может быть хуже величины (l/2π)(h/λ):

и для типовых значений λ, и h составляет 
Что касается суммарного полезного сигнала αΣ, то с большой вероятностью его величина никогда не будет равной нулю, что обосновывается либо несимметричность формы искомых металлических предметов, либо - в случае их симметрии - несовпадением их оси симметрии с осью симметрии ИК (ось Y, фиг. 1), либо расположением металлических предметов вне этой оси.
Вместе с тем, для уменьшения влияния нескомпенсированных остатков обоих видов помех - внутренней и внешней, - на эффективность АИ средства МД используются элементы 8, 9, с помощью которых регистрируются возмущения стационарного распределения магнитного поля в зоне обнаружения, вызванные пересечением носителями металлических предметов арочного проема.
Источники информации
1. Березанский Д.П. Металлодетекторы - обнаружители оружия. Обзор принципов действия. Специальная техника, 1998, №4-5.
2. Синелыциков Г.А. Зарубежные арочные металлодетекторы: осознанный выбор. Специальная техника, 1999, №1-2.
3. Металлообнаружитель. Патент RU №2165094.
4. Металлообнаружитель. Патент RU №2297018.
5. Щедрин А.И. Новые металлоискатели для поиска кладов и реликвий. - М.; «Горячая линия - Телеком», 2003 г.
6. Оводенко А.А. Робастные локационные устройства. - Л.: Изд-во Ленингр. ун-та, 1981 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНИИ ПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2002 |
|
RU2205416C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОИЗЛУЧЕНИЯ В БЛИЖНЕЙ ЗОНЕ ИСТОЧНИКА | 2012 |
|
RU2505834C1 |
| ПЕЛЕНГАТОР БОКОВОГО ОБЗОРА | 2003 |
|
RU2252428C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ ИМПУЛЬСНЫМ МЕТАЛЛОДЕТЕКТОРОМ | 2014 |
|
RU2555516C1 |
| Приемник дециметрового диапазона | 2018 |
|
RU2684903C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ХАОТИЧЕСКОЙ ПОСЛЕДОВАТЕЛЬНОСТИ ИМПУЛЬСОВ | 2013 |
|
RU2536638C1 |
| Способ обнаружения источника радиоимпульсов | 2018 |
|
RU2674073C1 |
| КОМБИНИРОВАННЫЙ ДЕТЕКТОР ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛОВ И НАМАГНИЧЕННЫХ ПРЕДМЕТОВ | 2019 |
|
RU2800334C2 |
| УЛУЧШЕННОЕ СРЕДСТВО МЕТАЛЛОБНАРУЖЕНИЯ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ | 2020 |
|
RU2789658C1 |
| СИСТЕМА ДЛЯ ДОСМОТРА КЛАДИ | 2020 |
|
RU2789659C1 |

Изобретение относится к обнаружению запрещенных предметов и идентификации их носителей в потоке людей, поочередно пересекающих проем арочного металлодетектора. Сущность: осуществляют излучение зондирующего сигнала в виде последовательности коротких импульсов с высокой скважностью. Принимают отражённый сигнал двумя парами приёмных катушек, установленных на высоте h12 и h34 в левой и правой арочных стойках
соответственно. Формируют из выходных сигналов S1(t) и S2(t) первой и второй S2(t) приёмных катушек и выходных сигналов S3(t) и S4(t) третьей и четвертой приемных катушек градиентометрический сигнал S34(t)=S3(t)-S4(t). Формируют арочный сигнал S∑(t)=S12(t)-S34(t). Осуществляют частотную фильтрацию и временную селекцию арочного сигнала S∑(t) с последующим выделением мгновенных значений его амплитуды A(t). Формируют плавающий порог P(t) путём усреднения A(t) на интервале (t-T;t), где Т - время, отводимое для мониторинга одного лица в потоке. Носителем запрещённого предмета определяется лицо, пересекающее арочный проём в момент превышения A(t) порога P(t). Технический результат: повышение помехозащищенности арочно-импульсных металлодетекторов по отношению к внешней помехе, создаваемой удаленными источниками радиоизлучения. 3 ил.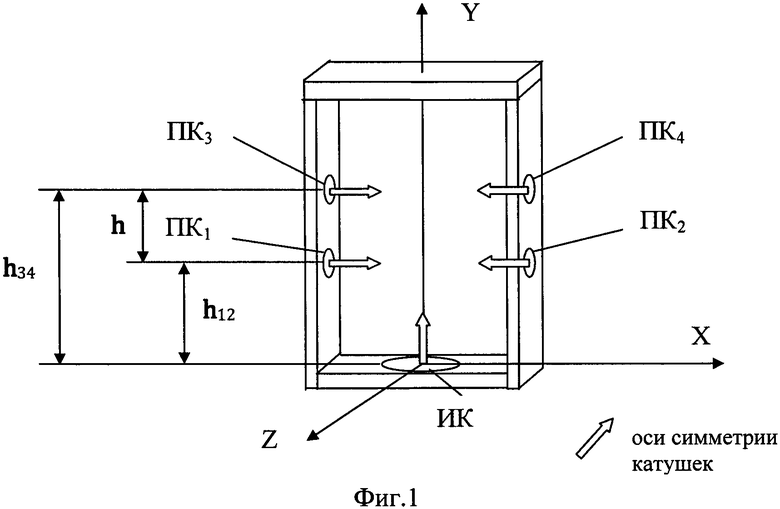
Способ обнаружения запрещённых предметов и идентификации их носителей в потоке людей, поочерёдно пересекающих проём арочного металлодетектора, в котором осуществляется излучение зондирующего сигнала в виде последовательности коротких импульсов с высокой скважностью, приём отражённого сигнала парой приёмных катушек, формирование из выходных сигналов первой S1(t) и второй S2(t) приёмных катушек, установленных на высоте h12 в левой и правой арочных стойках, соответственно, градиентометрического сигнала S12(t)=S1(t)-S2(t), частотная фильтрация и временная селекция арочного сигнала S∑(t) с последующим выделением мгновенных значений его амплитуды A(t), формирование плавающего порога P(t) путём усреднения A(t) на интервале (t-T;t), где Т - время, отводимое для мониторинга одного лица в потоке, а носителем запрещённого предмета определяется лицо, пересекающее арочный проём в момент превышения A(t) порога P(t), отличающийся тем, что дополнительно в левую и правую арочные стойки на высоте h34 устанавливаются соответственно третья и четвёртая приёмные катушки, из выходных сигналов которых S3(t) и S4(t) формируется градиентометрический сигнал S34(t)=S3(t)-S4(t), причем в качестве арочного сигнала S∑(t) используется разница S∑(t)=S12(t)-S34(t).
| СТАЦИОНАРНЫЙ МЕТАЛЛООБНАРУЖИТЕЛЬ | 1999 |
|
RU2165094C2 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ | 2005 |
|
RU2297018C2 |
| Прибор для разбивки откоса насыпи или выемки второго пути | 1935 |
|
SU49287A1 |
| US 5680103, ?21.10.1997 | |||
| US 4866424, 12.09.1989 | |||
| US 6819241 B2, ?16.11.2004. | |||

