Изобретение относится к способам защиты радиолокационных станции от самонаводящегося оружия, в частности от противорадиолокационных ракет (ПРР) и разведывательных летательных аппаратов (РЛА) с использованием прогнозирования положения мгновенного фазового центра путем использования дополнительных источников излучения (ДИИ).
Известен пассивный способ, в котором используется смещение точки наведения противорадиолокационной ракеты в сторону от подавляемой радиолокационной станции (РЛС). Такое смещение обеспечивается за счет использования дополнительных источников излучения и различного рода переотражателей [1].
Известен также способ, в котором используется несколько (N) дополнительных источников излучения, выполненных в виде передатчиков с антеннами [2]. Такие передатчики могут быть когерентными и некогерентными. В случае использования некогерентного источника, его сигналы имеют временные и частотные параметры, отличающиеся от параметров зондирующего сигнала РЛС, что дает возможность головкам самонаведения противорадиолокационных ракет (ГСН ПРР) селектировать сигнал РЛС на фоне сигналов дополнительных источников излучения по частотным и временным параметрам. Вероятность нацеливания ГСН ПРР на сигнал РЛС, в случае проведения предварительной разведки перед пуском ПРР, приблизительно равна 1, а в случае самостоятельной разведки ГСП в процессе полета равна I/(1+N).
При использовании когерентных источников параметры сигналов, излучаемых дополнительными источниками, совпадают с параметрами зондирующих сигналов (ЗС) РЛС. В таком случае сигналы от всех дополнительных источников будут изменяться вместе с изменением параметров зондирующих сигналов РЛС, а для ГСН ПРР придется производить повторный поиск временных и частотных параметров излучаемых радиолокационной станцией сигналов. Вероятность того, что ГСП ПРР выделит РЛС среди N ложных источников излучения при вышеуказанных условиях будет равна I/(1+N).
Известен способ защиты РЛС от противорадиолокационных ракет [3], выбранный в качестве ближайшего аналога и заключающийся в том, что для защиты радиолокационной станции используются N дополнительных источников излучения. При этом дополнительные источники излучения располагаются от защищаемой радиолокационной станции на расстояниях, не меньших радиуса поражения боевой части противорадиолокационной ракеты, и не больших расстояния прямой видимости защищаемой РЛС. Управление временными и частотными параметрами ДИИ должно обеспечиваться ведущей РЛС. При этом период излучения отвлекающих сигналов ДИИ должен быть меньше постоянной контура управления ПРР.
Известный способ не обеспечивает эффективной защиты радиолокационных станций от противорадиолокационных ракет и обнаружения их местоположения разведывательными летательными аппаратами, оборудованными бортовыми адаптивными пеленгующими устройствами (пеленгаторами), позволяющими определить направление прихода плоской сферической электромагнитной волны, исходящей из некоторого центра излучения, отождествляемого с фазовым центром антенны, обычно совпадающим с местоположением антенны РЛС.
Известно, что плоская фазированная антенная решетка (ФАР) с неравномерным несимметричным амплитудным распределением и произвольным расположением антенных решеток не обладает фазовым центром в строгом смысле [4]. Однако в дальней зоне такой распределенной системы источников излучения в области их расположения существует точка, относительно которой фазовая характеристика имеет минимальную кривизну по угловым переменным и аппроксимируется куском сферической поверхности.
Центр кривизны такой поверхности принимается за частичный фазовый центр рассматриваемой совокупности излучателей. В этом случае противорадиолокационные ракеты и разведывательные летательные аппараты, оборудованные радиопеленгаторами амплитудного, амплитудно-фазового или фазового типа фиксируют направление прихода плоской или сферической волны, по которому определяется направление на источник излучения, то есть пространственное положение частичного фазового центра.
Техническим результатом, на достижение которого направлено данное изобретение, является создание способа защиты радиолокационных станции от противорадиолокационных ракет и разведывательных летательных аппаратов с установленными на них бортовыми пеленгаторами (пеленгующими устройствами) за счет согласованного квазикогерентного излучения сигналов дополнительными источниками излучения - станциями подсвета (СП), управляемыми ведущей защищаемой РЛС и создающими в совокупности изменяющуюся нелинейную структуру волнового фронта вблизи ПРР и РЛА. Головка самонаведения ПРР и пеленгующее устройство РЛА не в состоянии определить за короткое время действительные положения источников излучения, в результате чего вероятность либо поражения РЛС, либо определения ее координат будет резко снижена.
Сущность заявленного изобретения состоит в том, что предлагается способ защиты радиолокационных станций от противорадиолокационных ракет) и разведывательных летательных аппаратов, снабженных бортовыми пеленгаторами с адаптивными антенными решетками, селектирующими приходящие сигналы по направлению их прихода, заключающийся в том, что с помощью защищаемой РЛС устанавливают факт наличия цели - противорадиолокационной ракеты или разведывательного летательного аппарата, определяют параметры ее положения - направление, дальность, скорость - и излучают в определяемом направлении отвлекающие сигналы N дополнительными источниками излучения, которые разнесены в пространстве и расположены относительно друг друга на расстоянии не менее расстояния равного радиусу поражения боевой части ПРР и на расстоянии в 3-5 км от защищаемой РЛС. При этом заявленный способ отличается от известного технического решения, указанного выше в качестве ближайшего аналога, тем, что N дополнительных источников излучения выполнены в виде N станций подсвета с управляемыми антеннами или антенными решетками с возможностью формирования ими совместно согласованного фокусируемого квазикогерентного излучения отвлекающих сигналов в точке нахождения цели - ПРР или РЛА, определяемой защищаемой РЛС в соответствии с определяемыми ею параметрами положения цели - ПРР или РЛА, путем быстропеременного изменения совокупного амплитудно-фазового распределения указанного излучения в зоне обзора бортового пеленгатора цели. фиксирующего положение заведомо несовпадающего с местоположением защищаемой РЛС, мгновенного фазового центра, управляемое путем детерминированного, прогнозируемого изменения уровней излучаемых отвлекающих сигналов N станциями подсвета, закон изменения которых, как будет показано дальше, определяется расчетным путем с применением известных формул, при этом период стабильного прогнозируемого в процессе управления пространственного положения фазового центра устанавливают в 5÷10 раз меньше времени, необходимого для пеленгации зондирующих сигналов защищаемой РЛС и N станций подсвета бортовыми пеленгаторами цели, и определяют из условия t≈(Та+Тп), где t - период стабильного прогнозируемого положения фазового центра квазикогерентного излучения отвлекающих сигналов, Та - время выделения направления прихода одного сигнала от какой-либо из указанных N станций подсвета, на фоне одновременно пришедших нескольких сигналов от остальных станций подсвета и защищаемой РЛС, Тп - время пеленгации направления прихода сигнала от одного источника излучения.
Сущность заявленного способа заключается в следующем. Рассмотрим распределенную на плоскости систему квазикогерентных источников электромагнитного излучения, изображенную на фиг.1. Пусть в точке М находится бортовой пеленгатор разведывательного летательного аппарата, вблизи которого формируется результирующий волновой фронт совокупности источников излучения с некоторой напряженностью поля [5]:
где  суммарный вектор напряженности поля в точке М от N станций подсвета и РЛС, имеющий размерность В/м;
суммарный вектор напряженности поля в точке М от N станций подсвета и РЛС, имеющий размерность В/м;
In - комплексная амплитуда электрического тока n-й излучающей системы; векторная нормированная диаграмма направленности, характеризующая угловое распределение поля и ее поляризационные свойства в зависимости от угловых координат (θn ϕn) в локальной сферической системе координат:
векторная нормированная диаграмма направленности, характеризующая угловое распределение поля и ее поляризационные свойства в зависимости от угловых координат (θn ϕn) в локальной сферической системе координат:
Фn(θ, ϕ)- фазовая характеристика n-й излучающей системы;
Rn - расстояние от центра n-й системы до точки М;
k = 2π/λ- волновое число λ- длина волны);
i - мнимая единица;
А=zchд/2λ - рассчитываемый коэффициент,
где, в свою очередь,
zc - характеристическое сопротивление свободного пространства;
hд - действующая длина антенны.
Величина наведенной ЭДС на выходе приемной антенны бортового пеленгатора, находящегося в точке М, фиг.1, определяется выражением (2):
где G - коэффициент усиления приемной антенны бортового пеленгатора;
rA - активная составляющая входного сопротивления бортовой антенны;
скобки <, > означают скалярное произведение векторных величин результирующей напряженности поля и
результирующей напряженности поля и нормированного значения векторной комплексной диаграммы направленности приемной антенны пеленгатора в направлении (θ, ϕ)
нормированного значения векторной комплексной диаграммы направленности приемной антенны пеленгатора в направлении (θ, ϕ)
Отсюда можно получить выражение для угловой зависимости фазы регистрируемых пеленгатором сигналов:
где αn(θ, ϕ)- фазовая характеристика приемной антенны в направлениях (θ, ϕ);
есть уровень поля n-го источника вблизи цели с учетом его расстояния до цели, векторных комплексных диаграмм направленности антенн источника и антенн пеленгатора цели.
Предположим, что в каждый фиксированный момент времени может быть осуществлена ранжировка источников излучения относительно q-гo источника с максимальной величиной парциальной напряженности поля в точке М. Тогда фазовая зависимость принимаемых сигналов может быть представлена в следующем эквивалентном виде:
где для
соответствует относительной величине поля каждого источника, нормированного к максимальному вкладу поля от q-го источника, а Ф = Ф(θ,_ϕ).
Поэтому последнее слагаемое в (5) меньше π/4 и структура мгновенного волнового фронта определяется, в основном, фазовой характеристикой и расположением q-го источника.
Физическая интерпретация этого выражения сводится к тому, что при малых значениях Pn=(n≠q), кажущийся источник излучения сферической волны смещается к точке q и с изменением ранжировки парциальных напряженностей полей перемещается к источнику с максимальным вкладом в (1). Как показано в [4], мгновенный фазовый центр (ФЦ) такой совокупности излучателей совпадает с центром тяжести амплитудного распределения всех источников излучения на плоскости.
Из этого анализа следует, что для того, чтобы затруднить бортовому пеленгатору определение направления ориентации эквивалентного плоского или сферического волнового фронта набегающих волн, необходимо организовать достаточно "быстрое" изменение амплитудного распределения поля квазикогерентной совокупностью излучателей вблизи ракеты или летательного аппарата. То есть такое, чтобы в течение интервала времени относительной стабильности частотного и фазового состоянии системы, бортовой пеленгатор не смог бы провести процедуру пеленгации источников излучения, даже с использованием бортовых адаптивных антенных решеток и алгоритмов пространственной фильтрации сигналов и помех.
Необходимо заметить, что бортовые пеленгаторы, устанавливаемые в последнее время на ракетах летательных аппаратах военного назначения, обладают адаптивными помехозащитными средствами, способными селектировать помеховые сигналы по направлениям их прихода.
Так, например, на самолетах типа F-16 установлена адаптивная антенная решетка, обеспечивающая формирование глубоких провалов в ДН в направлениях прихода N помех и в течение ~50-100 мкс такая система отстраивается от воздействия (N-1) помехи [7] и определяет направление на М-й источник излучения. Подобная система селекции направлений одновременного прихода сигналов от нескольких квазикогерентных источников и их последовательная пеленгация может быть установлена на бортовых пеленгаторах ПРР. В связи с этим необходима предварительная информация о технических характеристиках бортовых пеленгаторов потенциального противника.
Например, время пеленгации направления прихода сигнала от источника излучения составляет Тn время селекции одного направления на фоне нескольких сигналов составляет ~ Та, тогда общее время пеленгации n целей составит T= N(Ta+Tn), с.
Для того чтобы бортовой пеленгатор не смог определить ни одного направления излучения от наземных источников необходимо чтобы, время стабильного распределения совокупности мощности излучателей t был меньше времени селекции и пеленгации одного направления: t<(Ta+Tn).
Так как максимальная длительность импульса передатчика станции подсвета не превышает ~10-20 мкс, то стабильное временное положение фазового центра совокупности всех источников помех также не превысит 20 мкс, а из-за не синхронности импульсов излучения передатчиков в пределах длительности импульса, время фиксированного положения ФЦ будет еще меньше. Несовпадение излучаемых частот передатчиков помех с учетом их стабильности ~10-7 может привести к дополнительному фазовому шуму с амплитудой ~7 эл.град. поэтому в пределах временного интервала ~20 мкс, разреженная помеховая АР может считаться излучающей когерентные сигналы.
В этом случае положение мгновенного ФЦ отождествляется с центром кривизны фазовой характеристики излучающей системы в пеленговом направлении и может быть найдено, как положение центра тяжести амплитудного распределения разреженной антенной решетки, [6], состоящей из защищаемой РЛС и разнесенных в пространстве станций подсвета. При этом парциальные вклады в результирующую напряженность поля вблизи ПРР и РЛА от отдельных источников определяются выражением (4).
В этом случае определение координат, центра тяжести амплитудного распределения совокупности квазикогерентных излучателей, может быть проведено но формулам:
где  определяются из формул (4).
определяются из формул (4).
Действительно, ДН антенны бортового пеленгатора неизвестна и точную оценку (5) провести нельзя, однако, так как в качестве антенн пеленгатора обычно используются слабонаправленные антенны и в пределах всей зоны видимости группы станций подсвета и РЛС (F(θ, ϕ)) со стороны летательного аппарата изменяется мало, то в первом приближении координаты ФЦ определяются амплитудами излучения антенн станции подсвета и РЛС, что оказывается приемлемым при практической реализации комплекса.
Такой расчет достоверен с большой долей вероятности, так как расстояние от цели до РЛС много больше максимального диаметра области расположения всех источников излучения.
Относительно точки с координатами (x0j, y0j) фазовая характеристика в направлении cosγx, cosγy имеет нуль первой производной, то есть в этом направлении структура приходящей электромагнитной волны является плоской и бортовой пеленгатор определяет положение виртуального источника излучения с координатами (х0j, у0j).
Таким образом можно управлять текущим положением центра тяжести (х0, у0), используя при этом различные, как прогнозируемые, случайные по времени положения фазового центра, которые трудно запеленговать из-за кратковременности его нахождения в фиксированном положении и резкой частотной зависимости. По выражениям типа (6) может быть настроен алгоритм детерминированного перемещения ФЦ с преимущественным нахождением его в зоне, свободной от защищаемой РЛС и станций подсвета.
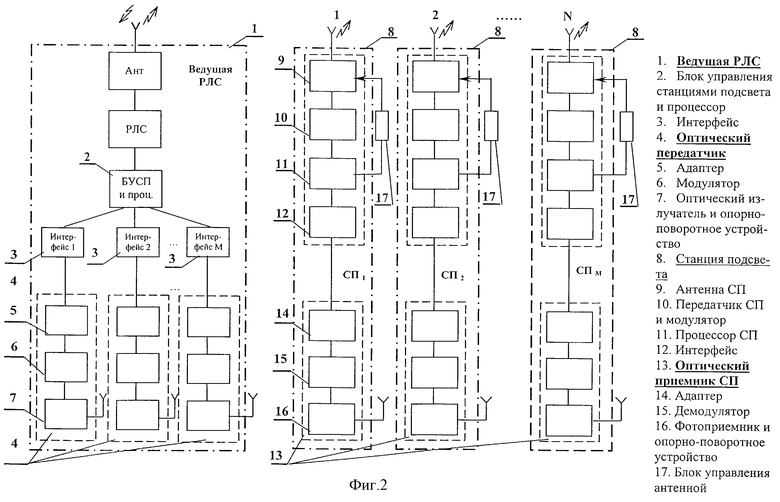
Приведенные данные позволяют построить структурную схему непеленгуемого комплекса РЛС, в состав которого входят ведущая защищаемая РЛС и N дополнительных источников излучения, выполненных в виде N разнесенных в пространстве ведомых станций подсвета (СП). На фиг.2 представлена структурная схема системы, позволяющей реализовать заявленный способ, и используются следующие обозначения:
1 - ведущая защищаемая РЛС,
2 - блок управления станциями подсвета и процессор, входящие в состав ведущей защищаемой РЛС,
3 - интерфейсы, входящие в состав ведущей защищаемой РЛС,
4 - оптические передатчики, входящие в состав ведущей защищаемой РЛС,
5 - адаптер, входящий в состав каждого оптического передатчика,
6 - модулятор оптического передатчика,
7 - оптический излучатель и опорно-поворотное устройство оптического передатчика,
8 - станции подсвета (СП),
9 - антенна СП,
10 - передатчик СП с модулятором,
11 - процессор СП,
12 - интерфейс СП,
13 - оптический приемник СП,
14 - адаптер оптического приемника СП,
15 - демодулятор оптического приемника СП,
16 - фотоприемник и опорно-поворотное устройство оптического приемника СП,
17 - блок управления антенной.
Работа комплекса начинается с режима поиска, при котором ведущая, защищаемая РЛС 1 осуществляет обзор заданного пространственного сектора и одновременно управляет положениями излучающих лучей антенн станций подсвета 8, синхронно ориентируя их в направлении собственного луча антенны РЛС с теми же угловыми координатами. При этом станции подсвета излучают зондирующие импульсы на рабочей частоте ведущей РЛС. Так как кратковременная стабильность частоты передатчиков станций подсвета обычно составляет 10-6-10-7 с, эти сигналы можно считать квазикогерентными.
Как только происходит захват цели ведущей радиолокационной станцией, определяются параметры положения цели - угловые координаты, дальность и скорость в процессоре РЛС, на основании которых в блоке управления станциями подсвета, при этом процессор РЛС и блок управления станциями подсвета на фиг.2 обозначены номером (2), вычисляется управляющая информация для каждой СП в виде целеуказаний и временных моментов излучения зондирующих импульсов, согласованных с известной дальностью отдельной СП до цели.
Через интерфейсы 3 эта информация передается в оптические передатчики 4 служебных оптических линий связи, обеспечивающих связь с соответствующими СП. В каждом оптическом передатчике управляющая информация поступает в адаптер 5, преобразующий ее в последовательность импульсов физического протокола, далее в модулятор 6, формирующий сигналы для модуляции оптического излучения излучателя 7, состоящего из излучающего элемента, формирующей оптики и опорно-поворотного устройства, ориентирующего соответствующий оптический излучатель на свою СП.
Передаваемая информация по трассе связи поступает в оптические приемники 13 соответствующих СП. Оптический приемник состоит из фотоприемника с формирующей оптикой, установленного на опорно-поворотном устройстве 16, демодулятора 15, связанного с фотоприемником и выделяющего последовательность импульсов физического протокола и адаптера 14, преобразующего эту последовательность импульсов в физический протокол представления информации на входе процессора СП 11, связанного с адаптером 14 через интерфейс 12.
Управляющая информация с выхода процессора СП 11 в каждой из N станции подсвета 8 поступает на передатчик СП 10 и обеспечивает с помощью блока управления 17 ориентацию луча передающей антенны СП 9, которая может быть выполнена, например, в виде антенной решетки, в заданное направление, синхронизирует моменты излучения зондирующих импульсов, формируемых модулятором передатчика 10 и, в соответствии с рассмотренным выше алгоритмом перемещения виртуального фазового центра обеспечивает изменение уровня излучаемой мощности через антенну 9 соответствующей СП.
В качестве служебной линии связи можно использовать не только оптическую линию связи, но и радиолинию, например, в мм-диапазоне волн, обладающую меньшими направленными свойствами, но большим радиусом действия. Структура и функциональные блоки такой радиолинии полностью аналогичны оптической линии связи, а варианты построения служебной линии связи определяются конкретными возможностями технической реализации непеленгуемого комплекса PЛC, остальные составляющие которого также выполнены на основе известных стандартных технических средств.
Таким образом, предлагаемый способ защиты радиолокационных станций от противорадиолокационных ракет и разведывательных летательных аппаратов, основанный на согласованном по времени квазикогерентном импульсном излучении группы разнесенных в пространстве сфокусированных дискретных источников излучения, позволяет прогнозируемым образом управлять с определенной скоростью положением отвлекающего мгновенного фазового центра излучения в пространстве, несовпадающим с фактическим местоположением защищаемой РЛС, что делает ее непеленгуемой.
Источники информации
1. Небабин В. Г. , Кузнецов И.Б. Защита РЛС от ПРР. Зарубежная радиоэлектроника, 1991, 4, с.67-81.
2. Патент США 4698638, М.кл. G 01 S 13/10.
3. Патент РФ 2099734, М.кл. G 01 S 7/38, 20.12.1997 (ближайший аналог).
4. Гомозов В.И., Гомозов А.В. Новый метод фокусировки электромагнитных излучений. Антенны, вып. 3(49), 2001, с.54-60.
5. Сазонов Д.М. Антенны и устройства СВЧ. М.: Высшая школа, 1988. 432 с.
6. Гусевский В. И. Фазовая характеристика и фазовый центр линейных и плоских АР. Радиотехника и электроника, 1992, 6, с.1000-1010.
7. Rama R. and J /H/ Williams. Measurements on a GPS Adaptive Antenna Array Mounted on a 1/8-Scade f-16 Aircraft // ION 98, p.241-244.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ защиты радиопередатчиков от пеленгации | 2023 |
|
RU2818300C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДОПОЛНИТЕЛЬНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ПОДЪЕМНОГО ТИПА | 2005 |
|
RU2287168C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПЕРЕИЗЛУЧАЮЩЕГО ЭКРАНА | 2001 |
|
RU2210089C2 |
| СПОСОБ ЗАЩИТЫ РЛС ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1999 |
|
RU2153684C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ САМОНАВОДЯЩЕГОСЯ ОРУЖИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2022 |
|
RU2794223C1 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2581704C1 |
| СПОСОБ ЗАЩИТЫ ГРУППЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ С ИСПОЛЬЗОВАНИЕМ ДОПОЛНИТЕЛЬНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099734C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2170940C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2256191C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ НА ОСНОВЕ ДОПОЛНИТЕЛЬНЫХ АКТИВНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2507533C2 |
Изобретение относится к способам защиты РЛС от ПРР и от обнаружения их местоположения РЛА, оборудованными бортовыми пеленгующими устройствами, и состоит в согласованном быстропеременном квазикогерентном излучении сигналов дополнительными источниками излучения - станциями подсвета, управляемыми защищаемой РЛС и создающими в совокупности изменяющуюся нелинейную структуру волнового фронта вблизи ПРР и РЛА. Достигаемым техническим результатом предлагаемого изобретения является снижение вероятности либо поражения РЛС, либо определения ее координат за счет того, что головка самонаведения ПРР и пеленгующее устройство РЛА не в состоянии определить за короткое время действительные положения источников излучения. 2 ил.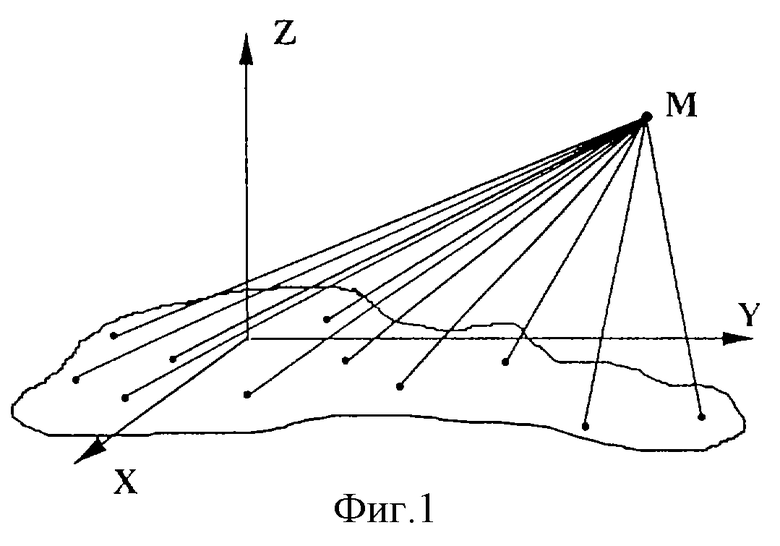
Способ защиты радиолокационных станций (РЛС) от противорадиолокационных ракет (ПРР) и разведывательных летательных аппаратов (РЛА), снабженных бортовыми пеленгаторами с адаптивными антенными решетками, селектирующими приходящие сигналы по направлению их прихода, заключающийся в том, что с помощью защищаемой РЛС устанавливают факт наличия цели - ПРР или РЛА, определяют параметры ее положения - направление, дальность, скорость и излучают в определяемом направлении отвлекающие сигналы N дополнительными источниками излучения, которые разнесены в пространстве и расположены относительно друг друга на расстоянии не менее расстояния, равного радиусу поражения боевой части ПРР, и на расстоянии в пределах 3-5 км от защищаемой РЛС, отличающийся тем, что N дополнительных источников излучения выполнены в виде N станций подсвета с управляемыми антеннами или антенными решетками с возможностью формирования ими совместно фокусируемого квазикогерентного излучения отвлекающих сигналов в точке нахождения ПРР или РЛА, определяемой защищаемой РЛС в соответствии с определяемыми ею параметрами положения цели, путем быстропеременного изменения совокупного амплитудно-фазового распределения указанных излучений в зоне нахождения бортового пеленгатора цели, фиксирующего положение, заведомо не совпадающее с местоположениями защищаемой РЛС или станциями подсвета, мгновенного фазового центра всей группы источников, управляемого путем детерминированного изменения уровней излучаемых отвлекающих сигналов N станциями подсвета, при этом период стабильного прогнозируемого в процессе управления пространственного положения фазового центра устанавливают в 5÷10 раз меньше времени, необходимого для селекции и пеленгации зондирующих сигналов защищаемой РЛС и N станций подсвета бортовыми пеленгаторами цели, и определяют из условия t≈(Тa+Тn), где t - период стабильного прогнозируемого положения фазового центра квазикогерентного излучения отвлекающих сигналов, Та - время выделения направления прихода одного сигнала от какой-либо из N станций подсвета на фоне одновременно пришедших сигналов от остальных станций подсвета и защищаемой РЛС, Tn - время пеленгации направления прихода сигнала от одного источника излучения.
| СПОСОБ ЗАЩИТЫ ГРУППЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ С ИСПОЛЬЗОВАНИЕМ ДОПОЛНИТЕЛЬНЫХ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099734C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЦЕЛЕЙ | 1994 |
|
RU2093852C1 |
| СПОСОБ ЗАЩИТЫ РЛС ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1999 |
|
RU2153684C1 |
| US 5003312 A, 26.03.1991 | |||
| US 5045857 A, 03.09.1991. | |||

