Изобретения относятся к способам защиты активной радиолокационной станции (РЛС) от противорадиолокационных ракет (ПРР), наводящихся по радиоизлучению.
Известны способ и устройство защиты РЛС, осуществляющей обзор зоны путем излучения зондирующих сигналов, от ПРР, основанные на отвлечении ПРР с помощью имитаторов-ловушек. Так, например, известным техническим решением является способ защиты РЛС от ПРР и устройства для его реализации по патенту США №4433333, основанные на имитации излучения РЛС неподвижными постановщиками ложных сигналов (ПЛС), расположенными на определенных расстояниях друг от друга и от защищаемой РЛС. При этом ПРР движется в направлении энергетического центра системы РЛС-ПЛС, смещенного как относительно ПЛС, так и относительно РЛС, вследствие чего появляется систематическая ошибка его наведения на РЛС и на ПЛС. Недостаток этих способа и устройств состоит в том, что необходимым условием работы системы является близость размещения ПЛС к защищаемой РЛС, с тем чтобы система наведения ПРР не могла разрешить пространственно источники излучения. Это приводит к тому, что при достаточно мощном боевом заряде ПРР высокая вероятность защиты РЛС и ПЛС не может быть обеспечена. Кроме того, необходимым условием надежной защиты РЛС является превышение мощности излучения ПЛС над РЛС во всех опасных направлениях, что реализовать практически невозможно.
Известны также способ и устройство защиты РЛС, основанные на использовании ракеты-ловушки (патент РФ №2153684), в которых имитатор излучения РЛС размещен на борту ракеты, запускаемой в направлении на ПРР. Недостаток данного способа и устройства состоит в том, что они работоспособны только в сочетании с выключением РЛС. В противном случае возмущение в траекторию ПРР создается лишь на время полета ракеты-ловушки. По окончании полета ракеты-ловушки траектория ПРР вновь устанавливается в направлении на РЛС.
Наиболее близким решением к заявляемому изобретению по технической сущности является способ защиты РЛС, осуществляющей излучение зондирующих сигналов, от ПРР, заключающийся в обнаружении ПРР, наведении на нее ЗУР и уничтожении ПРР путем подрыва боевой части ЗУР (Типугин В.Н., Вейцель В.А., Радиоуправление, “Сов. радио”, 1962 г., с.131-142). При этом могут использоваться как ЗУР, наводящаяся по командам от РЛС наведения (Типугин В.Н., Вейцель В.А., Радиоуправление, “Сов. радио”, 1962 г., с.89-141), так и самонаводящиеся ЗУР (Кринецкий Е.И., Системы самонаведения, “Машиностроение”, 1970 г., с.42-73).
Известный способ реализуется устройством, представляющим собой комплекс, состоящий из РЛС обнаружения, пункта управления ЗУР и бортовой аппаратуры ЗУР (Типугин В.Н., Вейцель В.А., Радиоуправление, “Сов. радио”, 1962 г., с.135, рис.2.23). Блок-схема комплекса изображена на фиг.1.
Известный комплекс содержит РЛС обнаружения целей 1, пункт управления ЗУР 2, бортовую аппаратуру ЗУР 3, причем пункт управления ЗУР 2 включает в себя РЛС наведения 4, счетно-решающее устройство 5, следящий силовой привод 6, передающее устройство 7, антенное устройство 8, а бортовая аппаратура ЗУР 3 содержит антенну ЗУР 9, радиоприемное устройство канала наведения ЗУР 10, систему ориентации и управления ЗУР 11. При этом выход РЛС обнаружения целей 1 соединен со входом РЛС наведения 4, выход РЛС наведения 4 соединен со входом счетно-решающего устройства 5, выход которого соединен с управляющим входом следящего силового привода 6, который, в свою очередь, механически соединен с антенным устройством 8. Выход передающего устройства 7 соединен со входом антенного устройства 8. Антенна ЗУР 9 соединена со входом радиоприемного устройства канала наведения ЗУР 10, выходы которого соединены с системой ориентации и управления ЗУР 11, причем связей канала наведения ЗУР 10 с системой ориентации и управления ЗУР 11 не менее трех.
Известный комплекс работает следующим образом. Радиолокационная станция обнаружения целей 1 осуществляет обзор заданной зоны пространства путем излучения зондирующих и приема отраженных сигналов. При обнаружении цели ее координаты в качестве целеуказания передаются в РЛС наведения 4 пункта управления ЗУР 2. С помощью счетно-решающего устройства 5 координаты цели уточняются, и в соответствии с ними с помощью следящего силового привода 6 антенное устройство 8 пункта управления ЗУР 2 разворачивается в направлении на цель. При этом равносигнальная зона диаграммы направленности радиолуча, сформированная с помощью антенного устройства 8, оказывается направленной на цель. В равносигнальной зоне движется ЗУР. В процессе управления движением ЗУР сигнал, излучаемый антенным устройством 8, принимается антенной ЗУР 9 и поступает в радиоприемное устройство канала наведения ЗУР 10, в котором формируются сигналы ошибок наведения ЗУР, т.е. сигналы, пропорциональные отклонениям направления движения ЗУР от направления равносигнальной зоны радиолуча. Эти сигналы поступают в систему ориентации и управления ЗУР 9, где в соответствии с ними положение рулей ЗУР изменяется в сторону уменьшения ошибок наведения.
Недостатком способа является недостаточно высокая надежность поражения ПРР зенитной управляемой ракетой. Это объясняется следующим. В процессе наведения на движущуюся цель ЗУР постоянно корректирует направление своего движения. При этом вследствие конечности быстродействия аппаратуры системы ориентации и управления ЗУР, ограниченных возможностей ЗУР по перегрузке и других факторов (Справочник офицера противовоздушной обороны, М., “Военное изд-во, 1987, стр.211) возникают динамические ошибки наведения. При достаточно высокой скорости ПРР динамические ошибки могут оказаться настолько большими, что произойдет срыв процесса наведения и промах ЗУР.
Решаемой задачей (техническим результатом), таким образом, является уменьшение динамических ошибок наведения ЗУР на ПРР.
Указанный технический результат достигается тем, что в известном способе защиты РЛС от ПРР, включающем излучение зондирующих сигналов, обнаружение ПРР, наведение ЗУР на ПРР, уничтожение ПРР путем подрыва боевой части ЗУР, согласно изобретению, наведение ЗУР, по крайней мере, в течение времени, непосредственно предшествующего подрыву боевой части ЗУР, производят по траектории, проходящей в окрестности воображаемой линии, соединяющей ПРР и РЛС, при этом постоянно определяют расстояния: от РЛС до ПРР DРЛС-ПРР, от РЛС до ЗУР DРЛС-ЗУР и от ЗУР до ПРР DЗУР-ПРР, и в моменты времени, опережающие моменты излучения зондирующего сигнала РЛС на величину Δt=(DРЛС-ЗУР+DЗУР-ПРР-DРЛС-ПРР)/с, где с - скорость света, с РЛС на ЗУР выдают команды на излучение сигнала, имитирующего сигнал РЛС.
Указанный технический результат достигается также тем, что непосредственно после излучения с ЗУР сигнала, имитирующего сигнал защищаемой РЛС, осуществляют выключение защищаемой РЛС.
Указанный технический результат достигается также тем, что в комплекс защиты РЛС от ПРР, содержащий РЛС обнаружения целей, пункт управления ЗУР, бортовую аппаратуру ЗУР, причем пункт управления ЗУР включает в себя РЛС наведения, счетно-решающее устройство, следящий силовой привод, передающее устройство, антенное устройство, а бортовая аппаратура ЗУР содержит антенну ЗУР, радиоприемное устройство канала наведения ЗУР, систему ориентации и управления ЗУР, при этом выход РЛС наведения соединен со входом счетно-решающего устройства, выход которого соединен с управляющим входом следящего силового привода, который механически соединен с антенным устройством, выход передающего устройства соединен со входом антенного устройства, антенна ЗУР соединена со входом радиоприемного устройства канала наведения ЗУР, выходы которого соединены с системой ориентации и управления ЗУР, согласно изобретению, введены выход импульсов синхронизации РЛС обнаружения целей, устройство распознавания объектов, вход которого соединен с информационным выходом РЛС обнаружения целей, а выход - со входом РЛС наведения, устройство формирования команд на излучение имитирующих сигналов, первый вход которого соединен с выходом устройства распознавания объектов, а второй вход - с выходом импульсов синхронизации РЛС обнаружения целей, в бортовую аппаратуру ЗУР введены вторая группа выходов радиоприемного устройства канала наведения ЗУР, передатчик имитирующих сигналов, входы которого соединены с этой группой выходов, и антенна, вход которой соединен с выходом передатчика имитирующих сигналов.
Суть предлагаемого способа защиты РЛС от ПРР состоит в следующем (фиг.2). Наведение ПРР на РЛС осуществляется по радиоизлучению РЛС, которая в процессе работы производит осмотр зоны, излучая при этом зондирующие и принимая отраженные сигналы. После обнаружения ПРР осуществляют пуск ЗУР. Обнаружение и распознавание ПРР может быть осуществлено защищаемой РЛС, которая выдает координаты ПРР в качестве целеуказания для РЛС наведения. Траекторию ЗУР выбирают такой, чтобы ЗУР, по крайней мере, в течение времени, непосредственно предшествующего подрыву ее боевой части, находилась в секторе наведения ПРР. Для этого наведение ЗУР в течение этого времени осуществляют по траектории, проходящей в окрестности воображаемой линии, соединяющей ПРР и защищаемую РЛС. По команде с защищаемой РЛС на ЗУР включают передатчик, излучающий сигнал, имитирующий зондирующий сигнал РЛС. Момент выдачи команды на включение передатчика выбирают таким, чтобы к ПРР сигнал с ЗУР пришел одновременно с зондирующим сигналом защищаемой РЛС. Для этого излучение сигнала на включение передатчика ЗУР производят с опережением зондирующего сигнала РЛС на величину Δt=(DРЛС-ЗУР+DЗУР-ПРР-DРЛС-ПРР)/с, где DРЛС-ПРР, DРЛС-ЗУР, DЗУР-ПРР - расстояния от РЛС до ПРР, от РЛС до ЗУР и от ЗУР до ПРР соответственно. Когда угловое рассогласование направлений на защищаемую РЛС и на ЗУР относительно ПРР таково, что они обе оказываются в секторе наведения ПРР, курс ПРР корректируется. При этом ПРР движется в направлении на энергетический центр системы ЗУР-РЛС, т.е. курс ПРР приближается к курсу на ЗУР. Известно, что ошибки наведения ЗУР на цель определяются динамическими ошибками, возникающими в результате отработки системой управления ЗУР управляющих воздействий от РЛС наведения (или от головки самонаведения для самонаводящейся ЗУР), отслеживающей движение цели (Справочник офицера противовоздушной обороны, М., “Военное изд-во, 1987, стр.211). Из-за конечности быстродействия системы управления ЗУР, а также ограниченных возможностей ЗУР по перегрузке динамические ошибки могут достигать значений, при которых происходит срыв процесса наведения и промах ЗУР. Приближение траектории ПРР к встречному с ЗУР курсу уменьшает величину маневра ЗУР, требуемую для отслеживания ею перемещения ПРР, а значит, уменьшаются и динамические ошибки наведения. Таким образом достигается заявленный технический результат.
Для увеличения надежности перенацеливания ПРР на ЗУР непосредственно после излучения с защищаемой РЛС команды на ЗУР на излучение сигнала, имитирующего сигнал РЛС, возможно выключение защищаемой РЛС.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - блок-схема реализации известного способа;
Фиг.2 - иллюстрация заявляемого способа наведения ЗУР на ПРР;
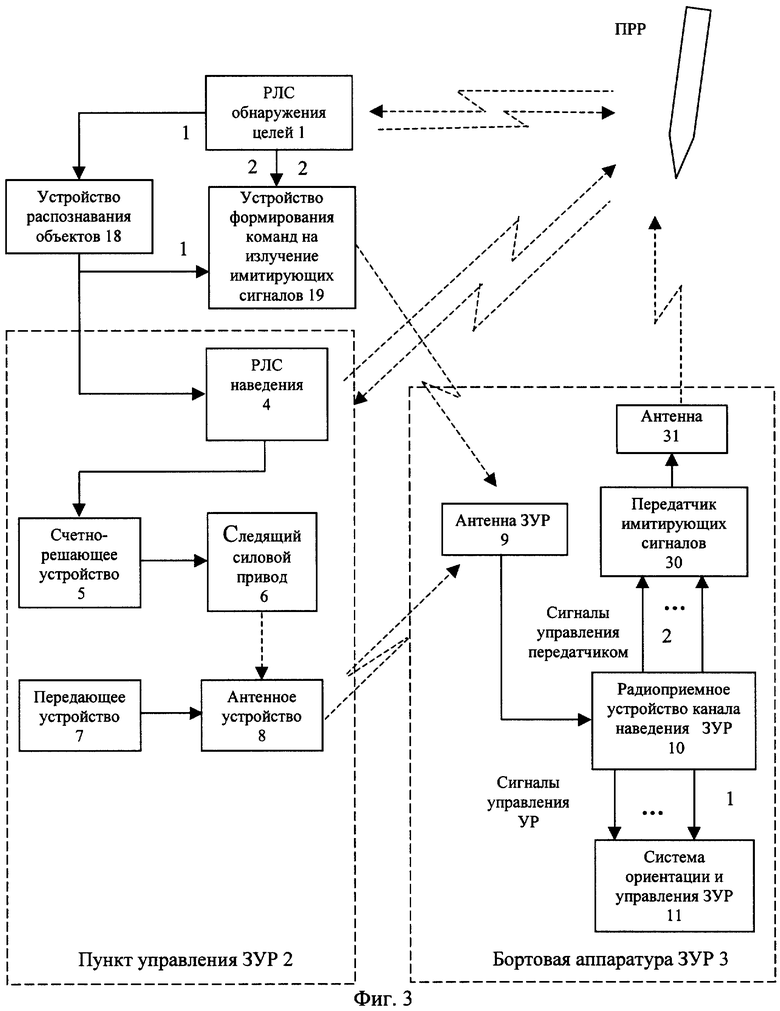
Фиг.3 - блок-схема заявляемого радиолокационного комплекса;
Фиг.4 - блок-схема РЛС обнаружения целей;
Фиг.5 - блок-схема устройства формирования команд на излучение имитирующих сигналов;
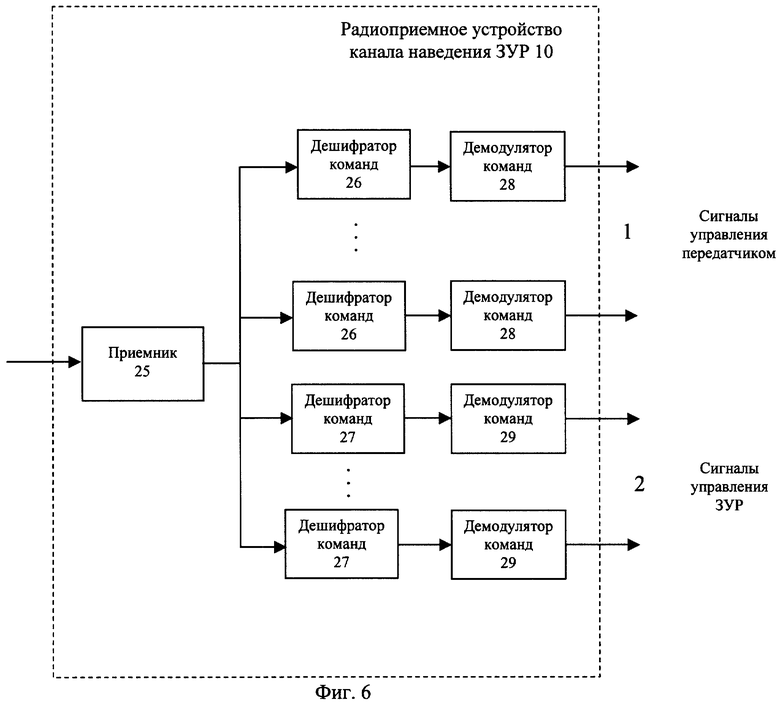
Фиг.6 - блок-схема приемного устройства канала наведения ЗУР.
Радиолокационный комплекс, реализующий предлагаемый способ (фиг.3), содержит РЛС обнаружения целей 1, пункт управления ЗУР 2, бортовую аппаратуру ЗУР 3, а также устройство распознавания объектов 18, устройство формирования команд на излучение имитирующих сигналов 19, при этом информационный выход РЛС обнаружения целей 1 соединен со входом устройства распознавания 18, выход которого соединен со входом пункта управления ЗУР 2 и с первым входом устройства формирования команд на излучение имитирующих сигналов 19, а выход импульсов синхронизации РЛС обнаружения целей 1 соединен со вторым входом устройства формирования команд на излучение имитирующих сигналов 19, причем пункт управления ЗУР 2 включает в себя РЛС наведения 4, счетно-решающее устройство 5, следящий силовой привод 6, передающее устройство 7, антенное устройство 8, причем выход РЛС наведения 4 соединен со входом счетно-решающего устройства 5, выход которого соединен с управляющим входом следящего силового привода 6, который механически соединен с антенным устройством 8, выход передающего устройства 7 соединен со входом антенного устройства 8, бортовая аппаратура ЗУР содержит антенну ЗУР 9, радиоприемное устройство канала наведения ЗУР 10, систему ориентации и управления ЗУР 11, передатчик имитирующих сигналов 30, антенну 31, причем антенна ЗУР 9 соединена со входом радиоприемного устройства канала наведения ЗУР 10, выходы которого соединены с системой ориентации и управления ЗУР 11, вторая группа выходов радиоприемного устройства канала наведения ЗУР 10 соединена с последовательно включенными передатчиком имитирующих сигналов 30 и антенной 31, при этом число связей радиоприемного устройства 10 с передатчиком 30 определяется количеством управляемых параметров передатчика 30.
РЛС обнаружения целей 1 (Теоретические основы радиолокации. Под ред. Ширмана Я.Д., М., “Советское радио”, 1970, стр.221) включает в себя последовательно соединенные синхронизатор 12, передатчик 13, антенный переключатель 14, приемник 15, индикаторное устройство 16, а также антенну 17, информационный вход/выход которой соединен с входом/выходом антенного переключателя 14, а координатный выход - со вторым входом индикаторного устройства 16 (фиг.4).
Устройство распознавания объектов 18 построено по известной схеме, описанной, например, в книге: Небабин В.Г. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984, стр.30.
Устройство формирования команд на излучение имитирующих сигналов 19 содержит последовательно соединенные ЗУ 20, вычислитель 21, устройство сравнения 22, передатчик команд 23 и антенну 24 (фиг.5).
Радиоприемное устройство канала наведения ЗУР 10 является известным устройством канала управления ЗУР (Типугин В.Н., Вейцель В.А., Радиоуправление, “Сов. радио”, 1961 г., с.430-431). Оно содержит приемник 25 и соединенные с его выходом дешифраторы команд управления 26 и 27 с последовательно включенными с ними демодуляторами команд 28 и 29 соответственно, причем блоки 26 и 28 являются дешифраторами и демодуляторами команд управления системой ориентации и управления ЗУР 11, а блоки 27 и 29 - дешифраторами и демодуляторами команд управления передатчиком имитирующих сигналов 30 (фиг.6).
Комплекс работает следующим образом. Радиолокационная станция обнаружения цели 1 осуществляет обзор и обнаружение целей в заданной зоне пространства и при распознавании с помощью устройства распознавания объектов 18 противорадиолокационной ракеты выдает ее координаты в РЛС наведения 4 пункта управления ЗУР 2 и в ЗУ 20 устройства формирования команд на излучение имитирующих сигналов 19. В ЗУ 20 записываются также координаты точки стояния РЛС 1. Координаты ПРР подаются далее на счетно-решающее устройство 5. С помощью следящего силового привода 6 антенное устройство 8 пункта управления ЗУР 2 в соответствии с уточненными координатами, полученными со счетно-решающего устройства 5, разворачивается в направлении на ПРР. Передающее устройство 7 работает постоянно. Равносигнальная зона диаграммы направленности радиолуча, сформированная с помощью антенного устройства 8, оказывается направленной на ПРР. Для обеспечения нахождения траектории ЗУР в непосредственной близости к воображаемой линии, соединяющей ПРР и РЛС, пункт управления ЗУР 2 располагают вблизи РЛС обнаружения целей 1. Производится пуск ЗУР. ЗУР движется в равносигнальной зоне. Так как РЛС наведения осуществляет постоянное слежение за ПРР, то равносигнальная зона также отслеживает ее движение. В процессе управления движением ЗУР сигнал, излучаемый антенным устройством 8 пункта управления ЗУР 2, принимается антенной ЗУР 9 и поступает в радиоприемное устройство канала наведения ЗУР 10, в котором формируются сигналы ошибок наведения ЗУР. Эти сигналы поступают в систему ориентации и управления ЗУР 11, где формируются сигналы управления положением рулей ЗУР в сторону уменьшения ошибок наведения. РЛС обнаружения целей 1 осуществляет обнаружение ЗУР, координаты которой после ее распознавания устройством распознавания объектов 18 поступают в ЗУ 20 устройства формирования команд на излучение имитирующих сигналов 19. Таким образом, в ЗУ 20 оказываются записанными координаты РЛС, ПРР и ЗУР. С использованием этих координат в вычислителе 21 определяются расстояния от РЛС до ПРР DРЛС-ПРР, от РЛС до ЗУР DРЛС-ЗУР и от ЗУР до ПРР DЗУР-ПРР и вычисляется величина времени опережения момента излучения зондирующего сигнала РЛС Δt=(DРЛС-ЗУР+DЗУР-ПРР-DРЛС-ПРР)/с. В устройстве сравнения 22 производится сравнение величины Δt со временем, оставшимся до излучения зондирующего сигнала РЛС 1. Это осуществляется с использованием импульсов синхронизатора 12, поступающих из РЛС обнаружения целей 1. При сравнении учитываются и заранее известные аппаратурные задержки, на величину которых для этого увеличивается значение Δt. В момент совпадения времен включается передатчик команд 23 и через антенну 24 в виде высокочастотного сигнала излучается команда на включение передатчика имитирующих сигналов 30. Команда принимается с помощью антенны ЗУР 9 радиоприемным устройством 10, преобразуется в управляющий сигнал, по которому включается передатчик имитирующих сигналов 30. Сигнал, имитирующий сигнал РЛС обнаружения целей 1, с помощью антенны 31 излучается в пространство. Зондирующий сигнал РЛС обнаружения целей 1 и сигнал с ЗУР, имитирующий излучение РЛС, достигают ПРР одновременно. Происходит изменение направления движения ПРР в направлении энергетического центра системы ЗУР-РЛС, в результате чего траектория ПРР приближается к встречному с ЗУР курсу. При таком изменении траектории ПРР требуемая для наведения на нее величина маневра ЗУР уменьшается, а значит, уменьшается динамическая ошибка наведения ЗУР. Таким образом достигается заявленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2170940C2 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ САМОНАВОДЯЩЕГОСЯ ОРУЖИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2022 |
|
RU2794223C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2223459C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ НА ВОЗДУШНУЮ ЦЕЛЬ (ВАРИАНТЫ) И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2253824C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПЕРЕИЗЛУЧАЮЩЕГО ЭКРАНА | 2001 |
|
RU2210089C2 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2581704C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152051C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И РАЗВЕДЫВАТЕЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2205418C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДОПОЛНИТЕЛЬНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ПОДЪЕМНОГО ТИПА | 2005 |
|
RU2287168C1 |
Изобретения относятся к способам защиты активной радиолокационной станции (РЛС) от противорадиолокационных ракет (ПРР). Достигаемым техническим результатом является уменьшение динамических ошибок наведения зенитных управляемых ракет (ЗУР) на ПРР. Технический результат достигается тем, что в способе и устройстве защиты РЛС от ПРР осуществляют излучение зондирующих сигналов, обнаружение ПРР, наведение ЗУР на ПРР, уничтожение ПРР путем подрыва боевой части ЗУР, наведение ЗУР, по крайней мере, в течение времени, непосредственно предшествующего подрыву боевой части ЗУР, производят по траектории, проходящей в окрестности воображаемой линии, соединяющей ПРР и РЛС, при этом постоянно определяют расстояния: от РЛС до ПРР DРЛС-ПРР, от РЛС до ЗУР DРЛС-ЗУР и от ЗУР до ПРР DЗУР-ПРР, и в моменты времени, опережающие моменты излучения зондирующего сигнала РЛС на величину Δt=(DРЛС-ЗУР+DЗУР-ПРР-DРЛС-ПРР)/с, где с - скорость света, с РЛС на ЗУР выдают команды на излучение сигнала, имитирующего сигнал РЛС. 2 н. и 1 з.п. ф-лы, 6 ил.
| ТИПУГИН В.Н., ВЕЙЦЕЛЬ В.А | |||
| Радиоуправление | |||
| М.: "Сов | |||
| радио", 1962, с.135, рис.2.23 | |||
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152051C1 |
| СПОСОБ ЗАЩИТЫ РЛС ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1999 |
|
RU2153684C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2170940C2 |
| US 4646098, 24.02.1987 | |||
| US 4347513, 31.08.1982 | |||
| Межоритарный триггер | 1973 |
|
SU465737A1 |

