Изобретение относится к акустическим эхолокационным системам, предназначенным для обнаружения и первичной классификации объектов по их акустической жесткости и может быть использовано в ультразвуковой дефектоскопии, гидроакустике, геоакустике, диагностической медицине, рыболокации.
Известна "Система для обнаружения и классификации, использующая униполярные импульсы" (патент США 3686669, G 01 S 9/02, НКИ 343/5 PC, ИЗР 17, 1972), содержащая синхронизатор, соединенный через генератор униполярных импульсов и коммутатор с акустическим широкополосным преобразователем. Второй выход коммутатора через усилитель соединен с сигнальным входом индикатора, вход запуска которого соединен с выходом синхронизатора. Такие блоки, как синхронизатор, коммутатор, усилитель и индикатор, имеются в заявляемом устройстве.
Устройство работает следующим образом. Синхронизатор вырабатывает периодически повторяющиеся видеоимпульсы, запускающие генератор униполярных импульсов, а также запускающие соответствующие блоки индикатора. Например, для осциллографического индикатора это генератор развертки и блок импульсов подсвета прямого хода луча. Униполярные импульсы проходят через коммутатор на широкополосный акустический преобразователь, излучающий импульсы в среду лоцирования. Излученные униполярные импульсы распространяются в среде, отражаются от объектов с акустическим сопротивлением Z1, отличным от акустического сопротивления среды распространения Z0, и принимаются акустическим широкополосным преобразователем. Принятые эхоимпульсы после усилителя подаются на сигнальный ход индикатора, генератор развертки которого запускается видеоимпульсом от синхронизатора. В зависимости от соотношений акустических сопротивлений среды Z0 и лоцируемых объектов Z1, соотношений длительности импульсов с размерами объектов и расстояния между объектами на экране индикатора наблюдается серия разнополярных, различных по длительности и амплитуде импульсов. Анализируя полученный сигнал, можно судить о расстоянии до объектов, их акустической жесткости, протяженности в пространстве.
Технический результат изобретения не может быть обеспечен в аналоге из-за наличия недостатков:
1) малая дальность действия, ограничиваемая малой чувствительностью акустического преобразователя в режимах приема и излучения, которая обусловлена необходимостью его механического или электрического демпфирования для обеспечения требования широкополосности;
2) неоднозначность определения полярности эхоимпульсов, обусловленная искажениями формы униполярных импульсов из-за частотной зависимости коэффициента затухания звука в среде распространения;
3) низкая достоверность получаемых результатов из-за угловой зависимости формы излучаемого и принимаемого униполярного импульсного сигнала, что обусловлено частотной зависимостью ширины характеристики направленности акустического преобразователя и широким частотным спектром униполярных импульсов;
4) низкая достоверность получаемых результатов из-за частотной зависимости модуля и фазы коэффициента отражения, что приводит к искажению формы униполярных эхоимпульсов, вплоть до утраты униполярности.
В патенте ФРГ 2006152 (G 01 S 9/66, ИЗР 1977, 7) описан локатор, содержащий излучающий тракт, состоящий из передатчика и соединенной с ним излучающей антенны, которая излучает сигнал, содержащий два связанных между собой по фазе колебания с частотами f1 и f2, приемную антенну, соединенную с приемным трактом, выход которого соединен с последовательно включенными схемой выделения постоянной составляющей, первого порогового устройства, решающей ступени для формирования сигнала об акустической жесткости и первым сигнальным входом индикатора. Синхронизирующий вход индикатора соединен с синхронизирующим выходом излучающего тракта. Приемный тракт содержит два полосовых фильтра, пропускающих частоты f1 и f2, входы которых соединены с приемной антенной, выход первого фильтра через первый ограничитель амплитуды подключен к первому сигнальному входу схемы сравнения (фазового детектора), выход второго фильтра через последовательно соединенные второй ограничитель амплитуды и умножитель (удвоитель) частоты подключен ко второму сигнальному входу схемы сравнения, выход которой соединен со схемой выделения среднего уровня. Между выходом второго фильтра и управляющим входом схемы сравнения последовательно включены детектор и второе пороговое устройство, выход которого соединен со вторым сигнальным входом индикатора.
Излучающий тракт вырабатывает двухчастотный сигнал, частоты которого связаны соотношением f1= (n•f2), где n - целые числа и предпочтительно выбирается равным n=2.
Такие блоки, как индикатор, антенна, умножитель частоты, два ограничителя амплитуды, амплитудный детектор и фазовый детектор имеются в заявляемом устройстве.
Излучающий тракт вырабатывает периодически повторяющиеся импульсы, запускающие индикатор, и радиоимпульсы с частотами f1 и f2=f1/2, которые поступают на антенну, излучающую сигналы с частотами f1 и f2 в среду с акустическим сопротивлением Z0. Эти сигналы распространяются в среде, достигают поверхности объекта, имеющего акустическое сопротивление Z1≠Z0, отражаются от него и принимаются приемной антенной, с выхода которой напряжение поступает на входы двух фильтров: первого - настроенного на частоту f1, и второго - настроенного на частоту f2. С выхода первого фильтра сигнал с частотой f1 через последовательно соединенные детектор и второе пороговое устройство подается на второй сигнальный вход индикатора, а так же через первый ограничитель амплитуды на первый сигнальный вход фазового детектора. С выхода второго фильтра сигнал с частотой f2 через последовательно соединенные ограничитель амплитуды и умножитель частоты сигнала на два поступает на второй сигнальный вход фазового детектора. Сигналы, поступающие на входы детектора, могут находиться в фазе относительно друг друга, если Z1>Z0, и в противофазе, если Z1<Z0, т.е. для акустически жесткого и акустически мягкого отражающего объекта. Сигнал, снимаемый с выхода схемы выделения постоянной составляющей, включенной на выходе фазового детектора, в этих случаях будет иметь разную амплитуду (или полярность), что позволяет судить об акустическом сопротивлении Z1 объекта.
Технический результат изобретения не может быть обеспечен в аналоге из-за наличия недостатков:
1) малая дальность действия, ограничиваемая малой чувствительностью акустического преобразователя в режимах приема и излучения, которая обусловлена необходимостью его механического или электрического демпфирования для обеспечения требования широкополосности при излучении сигнала с двумя частотами, различающимися на октаву;
2) низкая достоверность получаемых результатов из-за частотной зависимости ширины характеристики направленности акустического преобразователя в режимах излучения и приема, приводящая к "озвучиванию" и контролю различных по размерам участков среды распространения сигналами с частотами f1 и f2. Поскольку разница в линейных размерах контролируемых участков пропорциональна отношению частот n=f1/f2=2, 3, 4,..., то возможны ситуации, когда на частоте f1 "озвучивается" один объект с определенной акустической жесткостью, а на частоте f2 - "озвучиваются" уже несколько объектов с различной жесткостью. Используемый в данном аналоге метод определения акустической жесткости, построенный на одномерном приближении, в рассматриваемой ситуации не дает однозначного результата и делает невозможной классификацию обнаруженных объектов;
3) низкая достоверность получаемых результатов из-за частотной зависимости фазы коэффициента отражения, которая в рамках используемого в аналоге алгоритма обработки эхосигнала при различных фазовых набегах на частотах f1 и f2 делает невозможным классификацию объектов. Источниками частотной зависимости фазы коэффициента отражения могут быть наличие пористой или слоистой структуры, особенности формы, волновые размеры и др.
Наибольшее сходство с заявляемым устройством имеет акустический эхоимпульсный локатор, патент РФ 2158007, G 01 S 13/32, ИЗР 2000, 29, содержащий синхронизатор, соединенный со входом запуска индикатора и генератором радиоимпульсов, выход которого через два делителя частоты соединен с двумя входами сумматора, выход которого через коммутатор соединен с акустическим преобразователем. Выход коммутатора соединен с входами двух фильтров, выход первого фильтра через последовательно соединенные умножитель частоты и усилитель-ограничитель соединен с первым входом фазового детектора, а выход второго фильтра соединен с первым сигнальным входом индикатора, а также через последовательно соединенные второй умножитель частоты и второй усилитель-ограничитель с вторым входом фазового детектора, выход которого соединен с вторым сигнальным входом индикатора.
Такие блоки, как синхронизатор, индикатор, генератор радиоимпульсов, делитель частоты, антенна, коммутатор, умножитель частоты, два ограничителя амплитуды и фазовый детектор имеются в заявляемом устройстве.
Синхронизатор вырабатывает периодически повторяющиеся видеоимпульсы, запускающие индикатор и генератор радиоимпульсов с частотой заполнения f1, сигнал с которого поступает на два делителя частоты. На выходе первого делителя частоты формируется радиоимпульс с частотой заполнения f2=f1/n, а на выходе второго делителя частоты - радиоимпульс с частотой заполнения f3= f1/m, где n и m - простые числа, в частности в прототипе предлагается m=n+1. Сигналы с частотами f2 и f3 поступают на сумматор, а с его выхода через коммутатор на акустический преобразователь, излучающий в среду акустический сигнал, содержащий две спектральные составляющие. Эти сигналы распространяются в среде, достигают поверхности объекта, имеющего акустическое сопротивление Z1≠Z0, отражаются от него и принимаются тем же акустическим преобразователем. Напряжение с него поступает через коммутатор на входы двух фильтров: первого - настроенного на частоту f2 и второго - настроенного на частоту f3. С выхода первого фильтра сигнал с частотой f3 через последовательно соединенные умножитель частоты с коэффициентом умножения m и первый усилитель-ограничитель поступает на первый вход фазового детектора, а с выхода второго фильтра сигнал с частотой f2 подается на первый сигнальный вход индикатора, а также через умножитель частоты с коэффициентом умножения n и второй усилитель-ограничитель на второй вход фазового детектора.
По сигналу с выхода второго фильтра судят о наличии, величине и удалении объекта от преобразователя. Сигнал с выхода фазового детектора поступает на второй сигнальный вход индикатора, по нему судят об акустической жесткости объекта.
Технический результат изобретения не может быть обеспечен в прототипе из-за наличия недостатков:
1) большая мертвая зона и низкая разрешающая способность, обусловленные необходимостью излучения радиоимпульсов с большой длительностью. Последнее требование очевидным образом следует из решаемой в прототипе задачи обеспечения узкой полосы частот, занимаемой двухчастотным радиоимпульсом, для увеличения дальности локации и снижения погрешностей из-за частотной зависимости условий распространения и отражения от объекта двух волн с разными частотами;
2) низкая достоверность классификации, возникающая при фазовом детектировании из-за взаимного наложения и невозможности полного разделения в приемном тракте локатора спектров двух моночастотных радиоимпульсов с частотами заполнения f2 и f3. Это приводит к погрешностям в работе фазового детектора, обусловленным:
- присутствием в спектрах эхосигналов на выходах первого и второго фильтров компонент, отсутствовавших в их исходных спектрах этих сигналов и появившихся из-за наложения спектров;
- отсутствием части первоначального спектра у обоих радиоимпульсов из-за ее попадания в полосу задерживания фильтров;
3) низкая достоверность классификации, возникающая из-за фазового набега в сигналах с частотами f2 и f3 в процессе излучения и приема их акустическим преобразователем
Первый недостаток обусловлен следующим. Излучаемый и распространяющийся в среде двухчастотный радиоимпульс представляет собой сумму двух совмещенных во времени моночастотных радиоимпульсов с частотами заполнения f2 и f3, которые в приемном тракте должны быть разделены двумя частотными фильтрами для последующей обработки и фазового детектирования. Разделение радиоимпульсов фильтрами возможно при условии, что их спектры разнесены по частоте и не перекрываются (не накладываются). Эти условия, являющиеся обязательными для обеспечения работоспособности прототипа, будут строго выполняться лишь в случае использования непрерывных сигналов с частотами f2 и f3, спектр которых содержит две компоненты на частотах f2 и f3. Поскольку прототип заявлен как эхоимпульсный локатор, то предполагается его работа в импульсном режиме.
Спектр радиоимпульса конечной длительности бесконечен (Гоноровский И.С. Радиотехнические цепи и сигналы. М.: Радио и связь, 1986, с.81), в частности, огибающая спектра прямоугольного радиоимпульса имеет вид бесконечно убывающей синусоиды с максимумом на частоте заполнения (пунктирные линии на фиг. 1). Полоса частот, занимаемая основной частью энергии радиоимпульса обратно пропорциональна длительности импульса
где τИ - длительность импульса. Для сужения ширины спектра моночастотных радиоимпульсов требуется увеличивать их длительность.
В прототипе частоты соотносятся как
f3/f2=n/m=n/(n+1),
что позволяет при n>>1 сузить полосу, занимаемую излучаемым двухчастотным сигналом, т.е. выполнить условие:
При этом спектры моночастотных радиоимпульсов не будут накладываться только в случае, если Δf ≫ ΔF, т.е.
Следовательно, сужение полосы частот, занимаемой излучаемым двухчастотным радиоимпульсом (это происходит при увеличении n), должно сопровождаться увеличением длительности импульсов, что противоречит условиям увеличения разрешающей способности и уменьшения мертвой зоны эхолокатора.
Например, протяженность радиоимпульса (l=сτИ), являющаяся мерой лучевой разрешающей способности и мертвой зоны эхометода, с типичными для дефектоскопии частотами заполнения (1,25; 2,5; 5 МГц) в изделии из стали (скорость продольной звуковой волны с=6100 м/с) имеет следующие значения:
τИ•f0=10, - l=48,8; 24,4; 12,2 мм;
τИ•f0=20, - l=97,6; 48,8; 24,4 мм;
τИ•f0=40, - l=195,2; 97,6; 48,8 мм,
Эти величины соизмеримы или превышают толщины реальных изделий, подвергаемых ультразвуковому контролю, делая сам контроль невозможным либо крайне неэффективным.
Второй недостаток прототипа принципиально неустраним при импульсном режиме работы эхолокатора, поскольку невозможно разделить фильтрами совмещенные во времени моночастотные радиоимпульсы с различными частотами заполнения и конечной длительностью импульсов без искажения их спектра. Это объясняется неизбежным наложением (перекрытием) смежных участков спектра радиоимпульсов при их совместном прохождении электрического излучающего и акустического трактов. Использование в приемном тракте фильтров для разделения эхосигналов с разными частотами не обеспечивает восстановление исходных спектров этих радиоимпульсов, а приводит лишь к разделению на две части их общего спектра, сплошные линии на фиг.1. Примечательно, что от качества фильтров это не зависит, оставаясь справедливым и для случая идеальных фильтров.
На фиг. 1 показана динамика изменений общего спектра двух моночастотных радиоимпульсов (непрерывная линия), т. е. спектра двухчастотного радиоимпульса, относительно спектров отдельных радиоимпульсов (пунктирная линия) для описанного в прототипе случая f2/f3=10/11 при различных значениях длительности радиоимпульса. Наложение спектров сопровождается, фиг.1:
- смещением основных максимумов спектра относительно частот f2 и f3,
- нарушением симметрии спектров относительно основных максимумов после прохождения фильтров.
Перечисленные изменения приводят к погрешностям при фазовом детектировании. Видно, что даже при излучении длинных радиоимпульсов (например, τИ•f0= 40, где τИ и f0=(f2+f3)/2 - длительность и средняя частота заполнения радиоимпульса) на основной максимум спектра одного радиоимпульса накладываются боковые спектральные компоненты другого радиоимпульса.
Третий недостаток прототипа обусловлен следующим. Акустический преобразователь представляет собой электромеханическую колебательную систему, обладающую амплитудно-частотной (АЧХ) и фазо-частотной (ФЧХ) характеристиками, которые описываются известными выражениями (Подводные электроакустические преобразователи. : Справочник /В. В. Богородский и др. - Л.: Судостроение, 1983, с. 44. ; Голубев А.С., Преобразователи ультразвуковых дефектоскопов: Учеб. пособие/ ЛЭТИ. Л., 1986.). Сигналы с частотами f2 и f3, установленными в окрестностях резонансной частоты преобразователя, претерпевают сдвиги фаз, определяемые наклоном ФЧХ акустического преобразователя. Если частоты f2 и f3 расположены симметрично относительно резонансной частоты преобразователя, то соответствующие сдвиги фаз сигналов с частотами f2 и f3 будут иметь разные знаки. Для оценки ошибки запишем выражения для сигналов с частотами f2 и f3, поступающих на преобразователь из электрического излучающего тракта:

где ω1 = 2•π•f1 - круговая частота заполнения радиоимпульса на выходе генератора радиоимпульсов; ω2 = 2•π•f2 и ω3 = 2•π•f3 - круговые частоты на выходе делителей частоты; ϕ1 - начальная фаза сигнала с частотой ω1; U2m и U3m - начальные амплитуды сигналов с частотами ω2 и ω3 соответственно.
Амплитуды акустических сигналов на поверхности акустического преобразователя, работающего в режиме излучения:

где ϕ
Пройдя расстояние r, акустические сигналы U2 изл(t) и Uв изл(t) достигают поверхности отражателя, отражаются от него, претерпевая при этом соответствующие сдвиги фаз α2 и α3, проходят еще раз расстояние r и достигают преобразователя, преобразующего их в электрические сигналы. При этом дополнительный фазовый сдвиг, обусловленный задержкой сигналов при прохождении расстояния 2•r равен:

где с - скорость звука в среде распространения.
Выражения для сигналов, принятых преобразователем, будут иметь вид:
где ϕ
Применяя предложенную в прототипе обработку принятых сигналов (фильтрация и умножение частот на n и m, соответственно), получаем выражения для сигналов на входах фазового детектора:

где U2m ф.д., U3m ф.д.(t) - амплитуды сигналов на входах фазового детектора с учетом коэффициентов передачи электронных цепей приемной части локатора.
Разность фаз между этими сигналами равна:
Если частоты f2 и f3 достаточно близки друг к другу, так что можно пренебречь различием α2 и α3 (α2 = α3 = α), а коэффициенты n и m отличаются на единицу, то окончательное выражение для разности фаз будет иметь вид:
где Δβ- погрешность, обусловленная набегами фаз в преобразователе.
Для определения набега фаз при излучении и приеме акустических волн, воспользуемся выражением для чувствительности преобразователя, работающего в совмещенном режиме (коэффициент двойного преобразования). Для простоты рассмотрения будем считать, что в режиме излучения преобразователь работает от идеального источника напряжения, а в режиме приема - нагружен на идеальный усилитель тока (режим короткого замыкания). В этом случае частота максимума чувствительности в режиме излучения (частота механического резонанса) совпадает с частотой максимума чувствительности в режиме приема, а точки перегиба (симметрии) ФХЧ в режиме излучения и приема будут находиться на резонансной частоте преобразователя.
Коэффициент двойного преобразования для преобразователя, работающего на одностороннюю нагрузку без переходных слоев, имеет вид:
K=L•M,
где  - чувствительность преобразователя в режиме излучения;
- чувствительность преобразователя в режиме излучения;  - чувствительность преобразователя в режиме приема; ξ
- чувствительность преобразователя в режиме приема; ξ
k и z0 - волновое число и волновой импеданс пьезопластины.
Выражения для чувствительности преобразователя в режимах излучения и приема можно выразить через модуль и фазу:
ϕизл = ϕпр = ϕ,
где ϕ - ФЧХ механического сопротивления преобразователя.
Тогда ФЧХ чувствительности преобразователя в совмещенном режиме:
ϕизл.-пр = ϕизл+ϕпр = 2•ϕ.
На фиг. 2. приведены фазочастотные характеристики нагруженного на воду акустического преобразователя для совмещенного режима при различных его добротностях. ФЧХ преобразователя в совмещенном режиме изменяется в диапазоне 2•π, на резонансной частоте сигнал не испытывает сдвига фазы.
Результирующая погрешность определения фазы коэффициента отражения прототипа равна:
Δβ = 2•ϕ3•m-2ϕ2•n.
При условии (n,m)>>1, т.е. ω2 ≈ ω3 справедливо соотношение ϕ3 = -ϕ2 = |ϕ|, поэтому для m=n+1 погрешность равна Δβ = 2•ϕ•(m+n) = 2•|ϕ|•(2•n+1). Видно, что при больших n и m погрешность Δβ может быть сколько угодно большой даже при сравнительно небольшой величине |ϕ|. Например, погрешность определения фазы коэффициента отражения при соотношении частот f3/f2=m/n=11/10, что составляет 10% от резонансной частоты преобразователя, при различных добротностях преобразователя (10, 50, 300) имеет следующие значения (|ϕ| равен 75, 125 и 140 градусов соответственно):
Q1=10-Δβ=2•75•11-2•(-75•10)=1650+1500=3150 град;
Q2=50-Δβ=2•125•11-2•(-125•10)=2750+2500=5250 град;
Q3=300-Δβ=2•140•11-2•(-140•10)=3080+2800=5880 град.
Применение сигналов с еще более близкими частотами, например f3/f2=m/n= 101/100, что соответствует полосе сигнала 1%, приводит к уменьшению фазовых набегов в преобразователе (Q1= 10) до единиц градусов, но увеличивает результирующую погрешность за счет умножения на m=101 и n=100.
На справедливость полученного вывода о большой величине погрешности Δβ не скажется несимметричное расположение частот ω2 и ω3 относительно резонансной частоты преобразователя, т. к. в пределах полосы пропускания ФЧХ преобразователя можно считать линейной.
Очевидно, что измерения фазы коэффициента отражения, диапазон возможного изменения которой находится в пределах от нуля до 180 градусов, в условиях, когда погрешность метода в десять раз и более превышает максимальное значение измеряемой величины, нельзя считать достоверными.
Техническим результатом предлагаемого изобретения является увеличение достоверности классификации объектов по акустической жесткости, увеличение разрешающей способности и уменьшение мертвой зоны.
Технический результат достигается тем, что в устройство, содержащее синхронизатор, соединенный со входом запуска индикатора и первым входом генератора радиоимпульсов, делитель частоты и коммутатор, соединенный первым выходом с акустическим преобразователем, первый усилитель-ограничитель, подключенный к первому входу фазового детектора, последовательно соединенные умножитель частоты и второй усилитель-ограничитель, фазовый детектор, включенный между выходом второго усилителя-ограничителя и вторым сигнальным входом индикатора введены последовательно соединенные генератор и амплитудный модулятор, нагруженные на второй вход генератора радиоимпульсов, последовательно включенные амплитудный детектор и фазовращатель, включенные между вторым выходом коммутатора и входом умножителя частоты, выход генератора соединен со входом делителя частоты, выход которого соединен со вторым входом амплитудного модулятора, второй выход коммутатора соединен с первым сигнальным входом индикатора и входом первого усилителя-ограничителя, выход генератора радиоимпульсов соединен со входом коммутатора.
Заявляемое устройство соответствует критериям изобретательский уровень, новизна и промышленная применимость, поскольку не обнаружено решений с признаками, отличающими заявляемое техническое решение от прототипа и аналогов.
Технический результат изобретения достигается благодаря введению в излучающий тракт эхолокатора последовательно соединенных генератора и амплитудного модулятора и последовательно включенных амплитудного детектора и фазовращателя в приемный тракт эхолокатора.
На фиг. 1 представлены спектры моночастотного и двухчастотного прямоугольных радиоимпульсов с частотами заполнения fl и f2 при различных длительностях импульса; на фиг.2 изображены фазочастотные характеристики преобразователя, работающего на воду в совмещенном режиме для различных добротностей; на фиг.3 приведена структурная схема устройства; на фиг.4 диаграммы напряжений, поясняющие работу устройства.
Акустический эхолокатор содержит синхронизатор 1, соединенный с первым входом генератора радиоимпульсов 2, генератор 3, соединенный через амплитудный модулятор 4 со вторым входом генератора радиоимпульсов 2, делитель частоты 5, включенный между генератором 3 и амплитудным модулятором 4, выход генератора радиоимпульсов 2 соединен через коммутатор 6 с акустическим преобразователем 7. Второй выход коммутатора 6 соединен со входом первого усилителя-ограничителя 8 и входом амплитудного детектора 9, выход которого через последовательно соединенные фазовращатель 10, умножитель частоты 11 и второй усилитель-ограничитель 12 соединен со вторым входом фазового детектора 13, выход первого усилителя ограничителя 8 соединен с первым входом фазового детектора 13, выход которого соединен со вторым сигнальным входом индикатора 14, коммутатор 6 соединен с первым сигнальным входом индикатора 14, вход запуска которого соединен с выходом синхронизатора 1.
Работает устройство следующим образом. Синхронизатор 1 через интервалы времени  (rmax - максимальная дальность локации; c - скорость звука в среде) вырабатывает видеоимпульсы U1, поступающие на вход запуска индикатора 14 (в осциллографическом индикаторе, например, это вход запуска генератора развертки) и на первый вход генератора радиоимпульсов 2, на второй вход которого с выхода амплитудного модулятора 4 поступает непрерывный амплитудно-модулированный сигнал U4:
(rmax - максимальная дальность локации; c - скорость звука в среде) вырабатывает видеоимпульсы U1, поступающие на вход запуска индикатора 14 (в осциллографическом индикаторе, например, это вход запуска генератора развертки) и на первый вход генератора радиоимпульсов 2, на второй вход которого с выхода амплитудного модулятора 4 поступает непрерывный амплитудно-модулированный сигнал U4:
U4(t) = U4m[1+m•cos(Ω•t+γ0)]•cos(ω0•t+θ0);
U4(t)=UH(t)+U0(t)+UB(t),
где U0(t) = U0m•cos(ω0•t+θ0) - напряжение несущей частоты;
UB(t) = UBm•cos(ωB•t+θ0+γ0) - напряжение верхней боковой частоты;
UH(t) = UHm•cos(ωH•t+θ0-γ0) - напряжение нижней боковой частоты;
U0m= U4m,  - амплитуды несущей, нижней и верхней составляющих сигнала U4 соответственно;
- амплитуды несущей, нижней и верхней составляющих сигнала U4 соответственно;
ωH = ω0-Ω, ωB = ω0+Ω - нижняя и верхняя частоты сигнала U4 соответственно;
0<m<1 - коэффициент модуляции.
Напряжение U4 формируется из двух связанных по частоте напряжений U2 и U3:
U2 = U2m•cos(ω0•t+θ0);
где  - частота модулирующего напряжения U3;
- частота модулирующего напряжения U3;  - начальная фаза модулирующего напряжения U3; N>>1 коэффициент деления делителя частоты 5.
- начальная фаза модулирующего напряжения U3; N>>1 коэффициент деления делителя частоты 5.
Генератор 3 вырабатывает гармонический сигнал несущей частоты U2, поступающий на первый вход амплитудного модулятора 4. С выхода делителя частоты 5 на второй вход амплитудного модулятора 4 подается сигнал модуляции U3. На выходе генератора радиоимпульсов 2 формируется амплитудно-модулированный радиоимпульс U5 с частотой заполнения ω0 и частотой огибающей Ω = ω0/N.
Сигнал U5 через коммутатор 6 поступает на акустический преобразователь 7, где претерпевает изменение фаз и ослабление амплитуд боковых составляющих в соответствии с его ФЧХ и АЧХ.
Пройдя расстояние Х=r, акустический сигнал U6 достигает поверхности объекта, отражается от него, претерпевая изменение фазы AM сигнала, проходит еще раз расстояние Х=r и, достигнув преобразователя 7, преобразуется в электрический сигнал U8:



где K(ωB), K(ω0), K(ωH) - коэффициенты передачи акустического преобразователя в режиме излучение-прием на соответствующих частотах;
ϕB, ϕ0, ϕH - фазовые набеги в акустическом преобразователе на частотах ωB, ω0 и ωH соответственно.
При ω0 = ωp, где ωp - резонансная частота акустического преобразователя, можно считать:
ϕ0 = 0;
ϕH = -ϕB = ϕ;
K(ω0)≥K(ωH) = K(ωB).
При N>>1 фазочастотную характеристику отражающего объекта в пределах полосы занимаемой сигналом U8 можно считать постоянной:
αH = α0 = αB/= α.
Тогда окончательное выражение для сигнала U8 примет вид:
где  - коэффициент модуляции с учетом демодуляции сигнала в акустическом преобразователе.
- коэффициент модуляции с учетом демодуляции сигнала в акустическом преобразователе.
С выхода коммутатора 6 сигнал U8 поступает на вход первого усилителя-ограничителя 8 и вход амплитудного детектора 9. На выходе первого усилителя-ограничителя 8 формируется сигнал U13:
поступающий на первый вход фазового детектора 12. С выхода амплитудного детектора 9 сигнал U9:
поступает на фазовращатель 10, где меняет свою начальную фазу на плюс ϕ. На выходе фазовращателя 10 формируется сигнал U10:
С выхода фазовращателя 10 сигнал U10 поступает через последовательно включенные умножитель частоты 11 и второй усилитель-ограничитель 12 на второй вход фазового детектора 13. Сигнал на выходе умножителя частоты 11: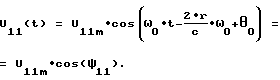
Сигнал U8 подается на первый сигнальный вход индикатора 14 для получения информации о наличии объекта, его размерах и удалении от преобразователя. Сигнал U14 с выхода фазового детектора 13 поступает на второй сигнальный вход индикатора 14 для получения информации о фазе коэффициента отражения и акустической жесткости материала обнаруженного объекта.
На выходе фазового детектора 13 формируется сигнал U14, пропорциональный фазе коэффициента отражения объекта:
U14 = M•f(Δψ) = M•f(ψ13-ψ11),
где М коэффициент передачи фазового детектора; f(Δψ) - детекторная функция фазового детектора. В частности:
U14 = M•cos(Δψ) = M•cos(α).
В случае акустически мягкого объекта (α=180o) выходное напряжение фазового детектора равно U14=-M, в случае акустически жесткого объекта (α=0o) напряжение равно U14=+M. Для объектов с промежуточными значениями фазы коэффициента отражения (0o<α<180o) сигнал U13 находится в пределах -M<U14<+M, что однозначно характеризует величину α и акустическую жесткость обнаруженного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| АКУСТИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1999 |
|
RU2158007C1 |
| ПАРАМЕТРИЧЕСКИЙ АКУСТИЧЕСКИЙ ЛОКАТОР | 2002 |
|
RU2205420C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО АКУСТИЧЕСКОЙ ЖЕСТКОСТИ | 1991 |
|
RU2006876C1 |
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1999 |
|
RU2149424C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО АКУСТИЧЕСКОЙ ЖЕСТКОСТИ | 1991 |
|
RU2006877C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2221259C2 |
| АКУСТИЧЕСКИЙ ЭХОИМПУЛЬСНЫЙ ЛОКАТОР | 2003 |
|
RU2242022C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛЕДОМЕР | 1991 |
|
RU2019855C1 |

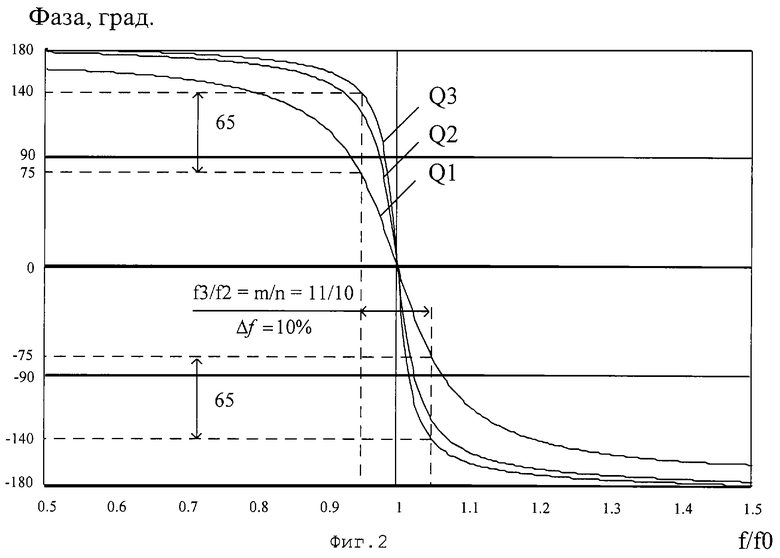

Изобретение относится к акустическим локационным системам и предназначено для обнаружения объектов, расположенных в акустически прозрачных средах, и классификации этих объектов по акустической жесткости. Преимущественная область использования - ультразвуковая дефектоскопия, гидроакустика, геоакустика, медицинская диагностика, рыболокация. Акустический эхолокатор содержит синхронизатор 1, индикатор 14, генератор 2 радиоимпульсов, делитель 5 частоты, коммутатор 6, акустический преобразователь 7, первый усилитель-ограничитель 8, фазовый детектор 13, умножитель 11 частоты, второй усилитель-ограничитель 12, генератор 3, амплитудный модулятор 4, амплитудный детектор 9 и фазовращатель 10. Достигаемым техническим результатом изобретения является увеличение достоверности классификации объектов по акустической жесткости, увеличение разрешающей способности и уменьшение мертвой зоны. 4 ил.
Акустический эхолокатор, содержащий синхронизатор, соединенный с входом запуска индикатора и первым входом генератора радиоимпульсов, делитель частоты и коммутатор, соединенный с акустическим преобразователем, первый усилитель-ограничитель, подключенный к первому входу фазового детектора, последовательно соединенные умножитель частоты и второй усилитель-ограничитель, фазовый детектор, включенный между выходом второго усилителя-ограничителя и вторым сигнальным входом индикатора, отличающийся тем, что в него введены последовательно соединенные генератор и амплитудный модулятор, нагруженный на второй вход генератора радиоимпульсов, последовательно включенные амплитудный детектор и фазовращатель, включенные между вторым выходом коммутатора и входом умножителя частоты, выход генератора соединен с входом делителя частоты, выход которого соединен со вторым входом амплитудного модулятора, второй выход коммутатора соединен с первым сигнальным входом индикатора и входом первого усилителя-ограничителя, выход генератора радиоимпульсов соединен с первым входом коммутатора.
| АКУСТИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1999 |
|
RU2158007C1 |
| АКУСТИЧЕСКИЙ ИМПУЛЬСНЫЙ ЛОКАТОР | 1993 |
|
RU2050558C1 |
| Устройство для эхолокационного контроля скважин | 1979 |
|
SU918913A1 |
| ТРЕХФАЗНАЯ ДРОБНАЯ (Q=6/7) ОБМОТКА СТАТОРА | 1994 |
|
RU2091959C1 |
| Абсорбент для селективного выделения сероводорода | 1981 |
|
SU1309902A3 |

