Изобретение относится к акустическим локационным системам и предназначено для поиска объектов вблизи протяженной поверхности раздела (дно, поверхность вода/воздух и др.) в рыбном промысле придонной и приповерхностной рыбы, для обнаружения плавающих объектов, в морской археологии, в морской геологии (при поиске и оценке залежей железно-марганцевых конкреций (ЖМК), при прокладке и эксплуатации подводных коммуникаций (трубопроводы, кабели и др. ), в поисковых работах, в неразрушающем контроле подводных частей гидротехнических сооружений.
Известны способ и устройство геофизической разведки морского дна, предназначенные для поиска на дне железно-марганцевых конкреций (пат. N 1554377, Великобритания, G 01 S 9/66 - опубл. "Изобр. СССР и за рубежом" N 1, 1980). Дно исследуется посредством излучения с буксируемого транспортного средства двух первичных звуковых пучков с близкими по величине частотами, которые наклонены вниз под углами 20-65o к вертикали и ориентированы перпендикулярно направлению движения. Пучки перекрываются в небольшом секторе, направленном вертикально вниз, и образуют в нем параметрическую антенну. Энергия обратного рассеяния первичных пучков принимается и отображается на регистраторе, ее интенсивность указывает на наличие или отсутствие на дне конкреций. Эхосигналы разностной частоты используются для построения профиля поддонной области. Анализируя принцип и условия работы устройства, следует отметить ряд свойственных ему недостатков. По причине одновременного прихода сильного эхосигнала от дна (поддонных слоев) и слабых эхосигналов от конкреции, что обусловлено наличием вертикально ориентированных пересекающихся секторов, практически невозможно отличить первые от вторых при условии равенства их частот. Использование буксируемого устройства ограничивает весогабаритные параметры излучающей антенны, делает невозможным снижение рабочих частот для увеличения глубины проникания волн в грунт. Из-за расширения озвучиваемого пятна на поверхности дна и соответствующего увеличения мешающего эхосигнала используемый метод принципиально не позволяет проводить поиск объектов на дне с больших расстояний, что и выразилось в использовании буксируемого транспортного средства. Данное устройство обладает низкой эффективностью обнаружения полупогруженных и полностью погруженных в дно объектов, что обусловлено малой площадью обратного рассеяния частично скрытых в грунте объектов при наклонном падении звукового пучка и угловой зависимостью коэффициента прохождения звуковых сигналов через границу вода/дно.
Известен интерференционный гидролокатор нелинейного типа, предназначенный для обнаружения объектов вблизи дна (морских мин), содержащий два разнесенных преобразователя для одновременного излучения двух высокочастотных сигналов с частотами f1 и f2. Прием эхосигналов осуществляется на разностной частоте решеткой из гидрофонов, сигнал с которых после обработки подается на индикатор (пат. N 2534383, Франция, G 01 S 15/87 - опубл. "Изобр. СССР и за рубежом" N 17, 1984 и пат. N 4596007, США, G 01 S 15/87 - опубл. "Изобр. СССР и за рубежом" N 8, 1987). Волны с частотой f1 излучаются обоими преобразователями синфазно, а волны с частотой f2 излучаются этими же преобразователями противофазно. Это приводит к формированию многолепестковой интерференционной характеристики направленности на разностной частоте. Недостатком данного устройства является невозможность обнаружения объектов на дне и под дном как по причине, мешающей интерференции эхосигналов от различных лепестков характеристики направленности, так и из-за плохого проникновения в грунт наклонно сориентированных по отношению к поверхности дна волн.
Из известных технических решений наиболее близким по технической сущности является обнаружитель морских мин (пат. N 3943482, США, G 01 S 9/68 - опубл. "Изобр. за рубежом" N 13, 1976). Устройство состоит из:
- стабилизированной платформы (стабилизированная платформа - в заявляемом объекте) на буксируемом устройстве,
- двухчастотного излучающего тракта и
- двухчастотного приемного тракта, которые через коммутатор прием-излучение соединены с обратимым электроакустическим преобразователем (обратимый электроакустический преобразователь - в заявляемом объекте), связанным механически с электродвигателем сканирования и преобразователем параметров движения в напряжение,
- программатора, связанного с приемным и излучающим трактами и электродвигателем,
- индикатора (индикатор - в заявляемом объекте), связанного с программатором, выходом приемного тракта и преобразователем параметров сканирования в напряжение.
Излучающий тракт устройства состоит из последовательно соединенных первого генератора (первый генератор - в заявляемом объекте), первого ключа (ключ - в заявляемом объекте), предварительного усилителя и усилителя мощности (усилитель мощности - в заявляемом объекте), выход которого нагружен на коммутатор прием-излучение (коммутатор прием-излучение - в заявляемом объекте), последовательно соединенных второго генератора (второй генератор - в заявляемом объекте) и второго ключа, нагруженного на вход предварительного усилителя, первой линии задержки, нагруженной на управляющий вход второго ключа, вход которой соединен с управляющим входом первого ключа и выходом программатора.
В приемный тракт входят усилитель (предварительный усилитель - в заявляемом объекте), к выходу которого подключены, во-первых, последовательно соединенные первый фильтр (первый избирательный фильтр - в заявляемом объекте), первый приемник (приемник - в заявляемом объекте) и третий ключ, во-вторых, последовательно соединенные второй фильтр (второй избирательный фильтр - в заявляемом объекте), второй приемник и четвертый ключ; первая схема временной автоматической регулировки усиления (ВАРУ), подключенная к управляющему входу первого приемника; вторая схема ВАРУ, подключенная к управляющему входу второго приемника; первый мультивибратор, соединенный одним выходом с управляющим входом третьего ключа, а вторым выходом соединен со вторым мультивибратором, выход которого соединен с управляющим входом четвертого ключа. Входы схем ВАРУ и первого мультивибратора соединены с программатором, а вход усилителя соединен с коммутатором прием-излучение, выходы третьего и четвертого ключей соединены с сигнальным входом индикатора.
В программатор входят последовательно соединенные тактовый генератор, генератор развертки, первый дифференциатор, третий мультивибратор, второй дифференциатор, вторая линия задержки, нагруженная на управляющий вход тактового генератора; третья и четвертая линии задержки, соединенные с выходом тактового генератора; компьютер, первый вход которого соединен с датчиком глубины, второй вход соединен с генератором сигнала сканирования, а выход соединен с управляющим входом второй линии задержки и электродвигателем; выход третьего мультивибратора соединен с управляющим входом первой линии задержки; выход генератора развертки соединен с входом развертки индикатора; выход тактового генератора соединен с управляющим входом первого мультивибратора; выход третьей линии задержки соединен с входом первой схемы ВАРУ; выход четвертой линии задержки соединен с входом второй схемы ВАРУ.
Выход преобразователя параметров сканирования в напряжение соединен с информационным входом индикатора.
Излучающий тракт обнаружителя мин формирует и излучает в воду следующие друг за другом два импульса с достаточно разнесенными частотами. Для расширения полосы поиска на дне звуковой пучок направлен под углом к поверхности дна и сканирует в секторе 120o. Сигнал высокой частоты предназначен для поиска объектов над дном и на дне, а сигнал низкой частоты используется для обнаружения погруженных в дно объектов. С целью расширения обследуемой полосы дна буксируемый носитель движется на небольшом удалении от дна. О наличии или отсутствии объекта судят по амплитуде эхосигналов. Аномальное увеличение амплитуды свидетельствует о наличии объекта.
Недостатками прототипа являются:
- невозможность эффективного поиска с больших расстояний, поскольку из-за большого времени распространения сигнала поперечное сканирование звуковым пучком приводит к частичной или полной потере эхосигналов направленным звукоприемником;
- низкая надежность обнаружения полупогруженных и погруженных объектов, обусловленная мешающим влиянием эхосигналов от дна и уменьшением коэффициента прохождения звуковой волны через границу вода/дно с увеличением угла падения;
- низкая производительность и высокая трудоемкость поисковых работ с помощью описанного устройства, обусловленные наличием буксируемого носителя, что предполагает трудоемкие операции его спуска, подъема, буксировки на заданном расстоянии от дна с помощью специальных механических устройств, а также - ограничениями на погодные условия, при которых возможна буксировка.
Перед изобретателями стояли задачи:
- обеспечить надежное обнаружение объектов специального и хозяйственного назначения в области морского дна при условии мешающего влияния сильного эхосигнала от дна, особенно на дне и в грунте;
- исключить жесткую привязку к поверхности дна приемных и излучающих антенн, обеспечить возможность обследования дна с борта надводного судна или другого надводного носителя;
- упростить процесс поиска, свести к минимуму эксплуатационные расходы и непроизводительные потери времени.
Техническим результатом предлагаемого изобретения является: увеличение надежности обнаружения полупогруженных и погруженных в дно объектов, увеличение дистанции поиска, увеличение производительности и снижение трудоемкости поисковых работ.
Технический результат достигается тем, что в устройство, содержащее два генератора, индикатор, ключ, последовательно соединенные усилитель мощности, коммутатор прием-излучение и обратимый электроакустический преобразователь, стабилизированную платформу, механически соединенную с обратимым электроакустическим преобразователем, предварительный усилитель, вход которого подключен к второму выходу коммутатора, а к выходу подключены, во-первых, последовательно соединенные первый избирательный фильтр и приемник и, во-вторых, второй избирательный фильтр, введены сумматор, два входа которого соединены с выходами генераторов, а выход соединен с входом ключа, импульсный генератор, выход которого соединен с управляющим входом ключа, последовательно соединенные ограничитель малых напряжений, вход которого соединен с выходом второго избирательного фильтра, амплитудный детектор, измеритель временных интервалов и преобразователь время/управляющий сигнал, выход которого соединен с управляющими входами генераторов, вход индикатора соединен с выходом приемника, выход индикатора соединен, во-первых, с входом импульсного генератора и, во-вторых, с вторым входом измерителя временных интервалов, выход ключа соединен с входом усилителя мощности.
Изобретение соответствует критериям "изобретательский уровень", "новизна" и "промышленная применимость", поскольку не обнаружено решений с признаками, отличающими заявляемое техническое решение от прототипа.
Возможность достижения технического результата изобретения подтверждается следующими теоретическими выводами. Известно, что при нормальном падении на плоскую границу и отражении от нее волны со сферическим волновым фронтом на поверхности границы образуются фазовые зоны, называемые зонами Френеля, в виде колец с радиусом:
где λ - длина звуковой волны; h - расстояние между излучателем, отражающей границей и звукоприемником; n - номер фазовой зоны. Эхосигналы от соседних зон Френеля в точке приема, находящейся на акустической оси пучка и совпадающей с фазовым центром излучателя, имеют фазы, отличающиеся на 180o. Если падающая на дно волна со сферическим фронтом ограничена внутри конуса, в основании которого сформировалась совокупность из первых двух зон (области А и Б на фиг. 1), то амплитуда эхосигнала в точке приема будет равна нулю, поскольку эхосигналы от 1-й и 2-й зон противофазны и вычитаются. Таким образом достигается устранение мешающего эхосигнала от поверхности отражающей границы. При наличии перед границей, на границе или за границей (полагаем ее полупроницаемой для звуковых волн) объекта с иными отражательными свойствами (волновое акустическое сопротивление, геометрическая форма, волновые размеры и др. ), чем у озвучиваемого участка границы, амплитуда эхосигнала в точке приема будет отлична от нуля и пропорциональна разнице отражательных свойств дна и объекта (объект C на фиг. 1). Таким образом, любой объект, на поверхности которого в силу какой-либо из причин не сформировались две зоны Френеля, вызовет отклик в виде эхосигнала в точке приема. Эхосигнал от дна будет предельно ослаблен при выполнении условия
где F - частота рабочей волны; C0 - скорость звука в среде (в воде); h - расстояние до дна; 2θ - угол раскрыва ограничивающего конуса (угол раскрыва характеристики направленности излучающей антенны): k ≅ (0.7 -1.5) - экспериментально определяемая постоянная.
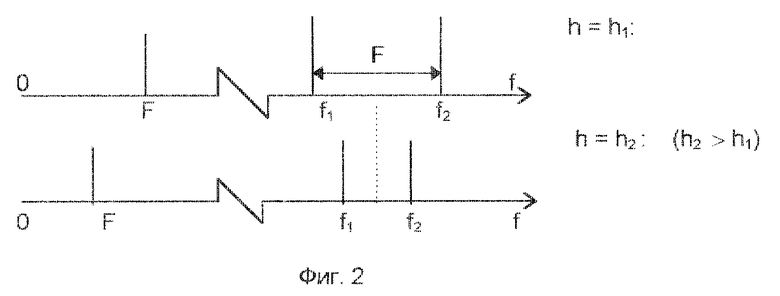
Роль ограничивающего конуса для излучаемой волны выполняет основной лепесток характеристики направленности излучающей параметрической антенны (ПА). В качестве рабочей волны в ПА используется волна разностной частоты (ВРЧ), частота которой равна разности частот волн накачки F = f2 - f1. Оба вышеназванные условия, - использование ПА и ВРЧ, - позволяют выполнить условие (2) благодаря известному свойству ПА - это сохранение постоянной ширины характеристики направленности (2θ ) ВРЧ в широком диапазоне разностной частоты. Если расстояние до дна изменяется в силу рельефа, то равенство (2) будет сохраняться, если при условии 2θ = const частота ВРЧ будет изменяться в противоположном направлении, т.е. эхосигнал от дна будет подавлен при одновременном выполнении условий:
Для перестройки частоты ВРЧ достаточно незначительно изменить частоты накачки (или одну из них). Значение частоты согласно (2) зависит от расстояния до дна, которое определяется по величине задержки эхосигнала накачки от дна
Таким образом, задержка эхосигнала с частотами накачки в каждом конкретном случае глубины служит параметром, задающим последующее изменение частот накачки (или одной из них).
Таким образом, предлагаемый эхолокатор для поиска объектов вблизи дна, на дне и в приповерхностном слое дна не имеет ограничений, связанных с расстоянием до дна и взаимным расположением объекта и дна, поскольку положенный в основу его работы способ устранения мешающего влияния эхосигналов от дна не зависит от расстояний излучатель/дно и дно/объект. Использование нормального лоцирования дна исключает потери энергии эхосигналов от погруженных в грунт объектов, связанные с угловой зависимостью коэффициента прохождения звуком границы вода/дно. Поскольку для нормальной работы эхолокатора не нужен буксируемый вдоль дна носитель, то отпадает необходимость в бортовом оборудовании для спуска, подъема и буксировки, исключаются непроизводительные затраты времени на опускание и подъем носителя, а также простой оборудования в период неблагоприятных для буксировки погодных условий.
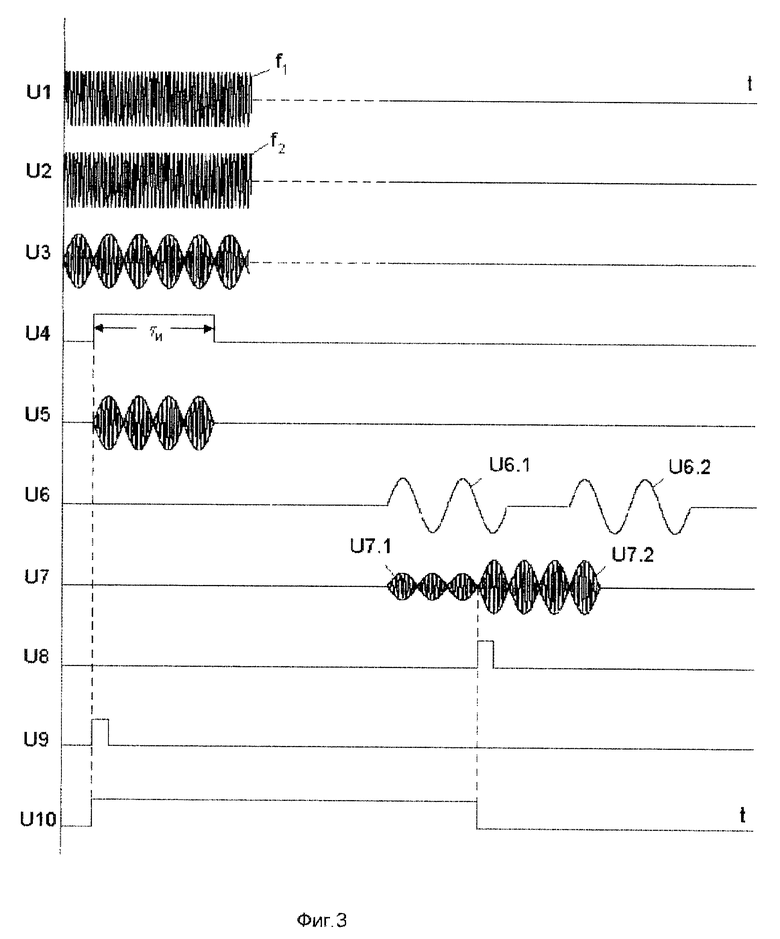
Предлагаемое изобретение поясняется прилагаемыми чертежами. На фиг. 1 приведена структурная схема эхолокатора. На фиг. 2 приведены спектрограммы, показывающие динамику частот накачки (f1, f2) и ВРЧ (F) при изменении расстояния до дна (h2 > h1). На фиг. 3 приведены эпюры напряжений, поясняющие работу устройства.
Эхолокатор для поиска объектов вблизи дна, на дне и в приповерхностном слое дна состоит из первого генератора 1, выход которого соединен с первым входом сумматора 2, второго генератора 3, выход которого соединен со вторым входом сумматора 2, последовательно соединенных ключа 4, сигнальный вход которого соединен с выходом сумматора 2, а управляющий вход соединен с выходом импульсного генератора 5, усилителя мощности 6, коммутатора прием-излучение 7 и обратимого электроакустического преобразователя 8, предварительного усилителя 9, вход которого соединен с вторым выходом коммутатора 7, а к выходу подключены, во-первых, последовательно соединенные первый избирательный фильтр 10, приемник 11 и индикатор 12, выход которого соединен с входом импульсного генератора 5, во-вторых, последовательно соединенные второй избирательный фильтр 13, ограничитель малых напряжений 14, амплитудный детектор 15, измеритель временных интервалов 16, второй вход которого соединен с выходом индикатора 12, и преобразователь время/управляющий сигнал 17, выход которого соединен, во-первых, с управляющим входом генератора 1 и, во-вторых, с управляющим входом генератора 3 стабилизированной платформы 18, механически связанной с обратимым электроакустическим преобразователем 8.
Преобразователь время/управляющий сигнал (17) может быть реализован на основе различных алгоритмов, например путем последовательного выполнения преобразований "время ---> число импульсов ---> двоичный код ---> напряжение", аппаратная реализация каждого из преобразований описана в литературе (см. Гутников B.C. Интегральная электроника в измерительных устройствах. - Л.: 1988. Титце У., Шенк К. Полупроводниковая схемотехника. - М.: 1982 и др. ).
В качестве измерителя временных интервалов (16) может использоваться двухвходовый триггер, например, RS- и JK-. Различные варианты ограничителей напряжения (14) можно найти в кн.: Алексеенко А. Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. - М.: Радио и Связь. 1981.
Работает схема следующим образом. Непрерывные электрические колебания U1 высокой частоты f1 с выхода первого генератора 1 и непрерывные электрические колебания U2 высокой частоты f2 с выхода второго генератора 3 поступают на сумматор 2. Непрерывный сигнал в виде биений близких частот U3 (двухчастотный сигнал f1 и f2, фиг.2) с выхода сумматора 2 поступает на ключ 4, где под действием управляющего сигнала U4 с выхода импульсного генератора 5 преобразуется в радиоимпульсы с двухчастотным заполнением U5 длительностью
τи ≥ (8÷10)/F.
Радиоимпульсы усиливаются усилителем мощности 6 и после прохождения коммутатора прием-излучение 7 поступают на обратимый электроакустический преобразователь 8 и излучаются в среду. За счет квадратичного характера нелинейности в среде происходит квадратичное акустическое детектирование излученного сигнала (сигнала накачки), т.е. генерация волны разностной частоты (ВРЧ) с частотой F = f2 - f1. Эхосигналы ВРЧ и эхосигналы накачки принимаются обратимым электроакустическим преобразователем 8, проходят коммутатор прием-излучение 7, усиливаются предварительным усилителем 9 и поступают на входы избирательных фильтров 10 и 13. Первый избирательный фильтр 10 настроен на пропускание сигналов с частотой F, а второй избирательный фильтр 13 настроен на частоту f0 = (f1 + f2)/2. После фильтра 10 низкочастотные эхосигналы от объектов над дном U6.1, в приповерхностном слое дна U6.2 и на дне проходят обработку в приемнике 11 и поступают на индикатор 12. После фильтра 13 эхосигналы накачки проходят ограничитель малых напряжений 14, где исключаются заведомо слабые сигналы U7.1 в сравнении с эхосигналами от дна (это могут быть эхосигналы от рыб и других малоразмерных объектов). Сильные эхосигналы накачки детектируются в амплитудном детекторе 15. Продетектированный сигнал U8 поступает на вход триггерной схемы измерителя временных интервалов 16. На второй вход измерителя 16 поступает синхроимпульс U9 с выхода индикатора 12. Измеритель 16 вырабатывает импульс U10 длительностью, равной времени задержки эхосигнала накачки U7.2 относительно момента излучения. В зависимости от схемного решения управляемых генераторов 1 и 3 управляющий сигнал может быть цифровым кодом или постоянным напряжением. Преобразователь время/управляющий сигнал 17 вырабатывает сигнал, который подается на входы генераторов 1, 3 и изменяет их частоту таким образом, чтобы выполнялось условие (2). При этом частота f1 может оставаться неизменной, фиг. 2, либо изменяется одновременно с частотой f2, но в противоположном направлении. Индикатор 12 осуществляет синхронизацию работы устройства. Стабилизирующая платформа 18 удерживает обратимый электроакустический преобразователь 8 ориентированным своей осью по нормали к поверхности дна, устраняет влияние качки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1992 |
|
RU2050559C1 |
| АКУСТИЧЕСКИЙ ЭХОИМПУЛЬСНЫЙ ЛОКАТОР | 2003 |
|
RU2242022C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР | 1995 |
|
RU2097785C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО АКУСТИЧЕСКОЙ ЖЕСТКОСТИ | 1991 |
|
RU2006876C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО АКУСТИЧЕСКОЙ ЖЕСТКОСТИ | 1991 |
|
RU2006877C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2205421C1 |
| Способ обнаружения объектов вблизи дна и на дне | 1991 |
|
SU1809405A1 |
Изобретение относится к акустическим локационным системам и предназначено для поиска объектов вблизи протяженной границы раздела - в рыбном промысле придонной и приповерхностной рыбы, для поиска плавающих объектов, в морской археологии, геологии (поиск железно-марганцевых конкреций), для контроля подводных коммуникаций (трубопроводы, кабели и др.), в неразрушающем контроле подводных частей гидротехнических сооружений. Технический результат заключается в повышении надежности обнаружения полупогруженных и погруженных объектов, увеличении дистанции поиска, повышении производительности и снижении трудоемкости поисковых работ и достигается за счет того, что в устройство, содержащее два генератора, индикатор, ключ, включенные последовательно усилитель мощности, коммутатор прием-излучение и обратимый электроакустический преобразователь, стабилизированную платформу, механически связанную с обратимым электроакустическим преобразователем, предварительный усилитель, вход которого соединен с вторым выходом коммутатора, а к выходу подключены последовательно соединенные первый избирательный фильтр и приемник и второй избирательный фильтр, введены сумматор, два входа которого соединены с выходами генераторов, а выход соединен с входом ключа, импульсный генератор, выход которого соединен с управляющим входом ключа, последовательно соединенные ограничитель малых напряжений, вход которого подключен к выходу второго избирательного фильтра, амплитудный детектор, измеритель временных интервалов и преобразователь время/управляющий сигнал, выход которого соединен с управляющими входами генераторов, выход индикатора соединен с входом импульсного генератора и вторым входом измерителя временных интервалов, выход ключа соединен с входом усилителя мощности. 3 ил.
Эхолокатор для поиска объектов вблизи дна, на дне и в приповерхностном слое дна, содержащий два генератора, индикатор, ключ, включенные последовательно усилитель мощности, коммутатор прием-излучение и обратимый электроакустический преобразователь, стабилизированную платформу, механически связанную с обратимым электроакустическим преобразователем, предварительный усилитель, вход которого соединен с вторым выходом коммутатора, а к выходу подключены последовательно соединенные первый избирательный фильтр и приемник, и второй избирательный фильтр, отличающийся тем, что в него введены сумматор, два входа которого соединены с выходами генераторов, а выход соединен с входом ключа, импульсный генератор, выход которого соединен с управляющим входом ключа, последовательно соединенные ограничитель малых напряжений, вход которого подключен к выходу второго избирательного фильтра, амплитудный детектор, измеритель временных интервалов и преобразователь время/управляющий сигнал, выход которого соединен с управляющими входами генераторов, выход индикатора соединен с входом импульсного генератора и вторым входом измерителя временных интервалов, выход ключа соединен с входом усилителя мощности.
| ЭХОЛОКАТОР ДЛЯ ПОИСКА ОБЪЕКТОВ ВБЛИЗИ ДНА, НА ДНЕ И В ПРИПОВЕРХНОСТНОМ СЛОЕ ДНА | 1992 |
|
RU2050559C1 |
| US 4596007 A, 12.10.1983 | |||
| US 3943482 A, 09.03.1976 | |||
| Способ очистки щелочной фосфатазы | 1988 |
|
SU1554377A1 |
| СПОСОБ ОБРАЗОВАНИЯ КАНАЛОВ НА КАТОДЕ В НЕСАМОСТОЯТЕЛЬНОМ ДУГОВОМ РАЗРЯДЕ | 2013 |
|
RU2537383C2 |
