Настоящая заявка является заявкой, выделенной из заявки 97114751 на выдачу патента РФ на изобретение.
Настоящее изобретение относится к транспортным средствам и способам транспортирования объектов, в частности к транспортным средствам и способам транспортирования объектов по местности, поверхность которой может быть неровной.
Уровень техники
Известен широкий диапазон транспортных средств и способов транспортирования, предназначенных для транспортирования людей. Конструкции таких транспортных средств обычно являются результатом компромисса, при котором остойчивости отдается предпочтение перед маневренностью. Например, трудно создать самодвижущееся и направляемое пользователем транспортное средство, предназначенное для транспортирования человека по местности с поверхностью, которая может быть неровной, и в то же время обеспечивающее возможность удобного передвижения по местности с относительно плоской поверхностью. Транспортные средства, которые обеспечивают передвижение по неровным поверхностям, обычно сложны, тяжелы и с затруднениями выполняют обычное передвижение.
Из патента США 3374845 известно транспортное средство для транспортирования человека, содержащее опору для человека, группу вращающихся элементов, соединенных с опорой и выполненных с ней в едином узле, привод от двигателя, установленный на указанном узле и соединенный с вращающимися элементами, и устройство управления остойчивостью транспортного средства, связанное с приводом от двигателя (ближайший аналог изобретения).
Из авторского свидетельства СССР 948734 известна ручная тележка для перемещения по лестницам. По бокам этой тележки расположены группы колес, установленные на свободно вращающихся крестовинах, для транспортировки грузов по лестницам. Однако до сих пор не было предложено использовать подобную конструкцию на транспортном средстве, которое, будучи неустойчивым при выключенном приводе, было бы способно динамически сохранять равновесие на месте или в движении, в том числе по лестницам, посредством привода на колеса.
Сущность изобретения
Предложены варианты транспортного средства, предназначенного для транспортирования объектов по местности, поверхность которой может иметь неровности. В первом варианте предложенное транспортное средство содержит опору для транспортируемого объекта, пару поперечно расположенных колес, соединенных с опорой и выполненных с ней в едином узле, привод от двигателя, установленный на указанном узле и соединенный с колесами, и систему автоматического управления транспортным средством. Отличие этого транспортного средства от ближайшего аналога состоит в том, что система автоматического управления снабжена средством выработки сигналов рассогласования по скорости и перемещению транспортного средства, средством выработки сигналов угла продольного наклона и угловой скорости продольного наклона транспортного средства, и суммирующим устройством, входы которого связаны с соответствующими выходами указанных средства выработки сигналов рассогласования по скорости и перемещению и средства выработки сигналов угла продольного наклона и угловой скорости продольного наклона, а выход которого связан с приводом от двигателя.
Второй вариант отличается от первого тем, что транспортное средство содержит несколько колес, объединенных в две группы колес, установленные с возможностью поворота вокруг оси, проходящей через центры групп, при этом привод от двигателя включает в себя двигатель привода колес и двигатель привода групп, причем система автоматического управления дополнительно снабжена средством выработки сигналов рассогласования по угловому положению групп, выход которого связан с двигателем привода групп.
Во втором варианте выполнения транспортного средства в каждой группе может быть по три колеса. В обоих вышеописанных вариантах опора может быть выполнена в виде платформы с возможностью расположения на ней стоящего человека, может иметь основание, расположенное над поверхностью перемещения на высоте, которая меньше высоты шага человека, или быть установлена с возможностью поворота вокруг горизонтальной оси. Площадь опоры может быть задана примерно равной следу ступней человека, стоящего на опоре. На опоре может быть закреплена рукоятка.
Средство выработки сигналов угла продольного наклона и угловой скорости продольного наклона транспортного средства может содержать уклономер для измерения продольного наклона транспортного средства, а средство выработки сигналов рассогласования по скорости и перемещению транспортного средства может содержать устройство управления движением транспортного средства, установленное, например, на рукоятке, которое, в свою очередь, может содержать интерфейс пользователя, а также датчик наклона транспортируемого объекта в заданном направлении. Такой датчик может быть выполнен в виде нажимной плиты или бесконтактного датчика.
Система автоматического управления может быть выполнена с возможностью циклического считывания поступающих в нее сигналов. На транспортном средстве могут быть предусмотрены сенсорное устройство для управления транспортным средством в зависимости от особенностей поверхности передвижения, регулятор ограничения скорости транспортного средства до заданного порогового значения, меньшего максимальной скорости транспортного средства.
Привод от двигателя может быть выполнен с возможностью дифференциального привода колес и заданного поворота транспортного средства в горизонтальной плоскости.
Средство выработки сигналов угла продольного наклона и угловой скорости продольного наклона транспортного средства может содержать датчик фиксирования опрокидывания средства.
Кроме того, вышеупомянутое устройство управления движением транспортного средства может содержать устройство ввода пользователем заданного направления движения, а также заданной скорости движения, в том числе нулевой скорости.
Перечень фигур чертежей и иных материалов
На фиг.1 представлен вид в перспективе варианта настоящего изобретения, на котором показан стоящий на нем человек.
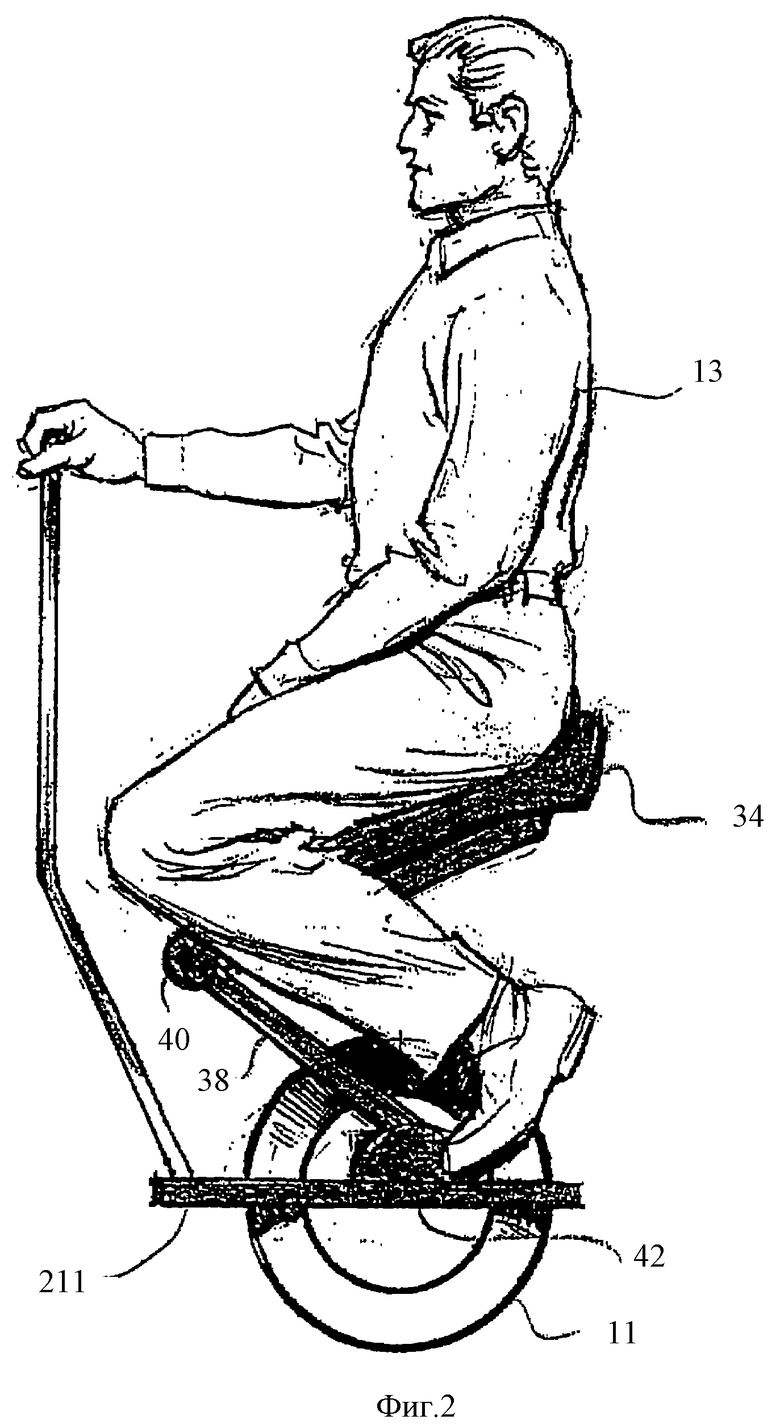
На фиг.2 представлен еще один вариант настоящего изобретения.
На фиг.3 представлена схема управления применительно к упрощенному варианту согласно фиг.1 для обеспечения равновесия при использовании крутящего момента колес.
На фиг.4 схематично показана работа ручкой управления при управлении колесами в вариантах конструкции согласно фиг.1.
На фиг.5 представлено использование конструкции с трехколесными группами.
На фиг. 6 представлена блок-схема характерного блока управления типа используемого в настоящем изобретении.
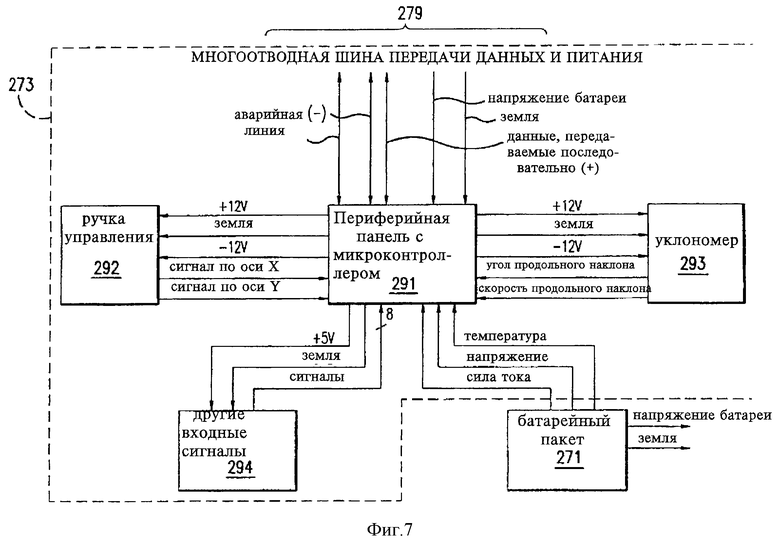
На фиг. 7 представлена блок-схема, на которой показаны детали блока 273 интерфейса оператора.
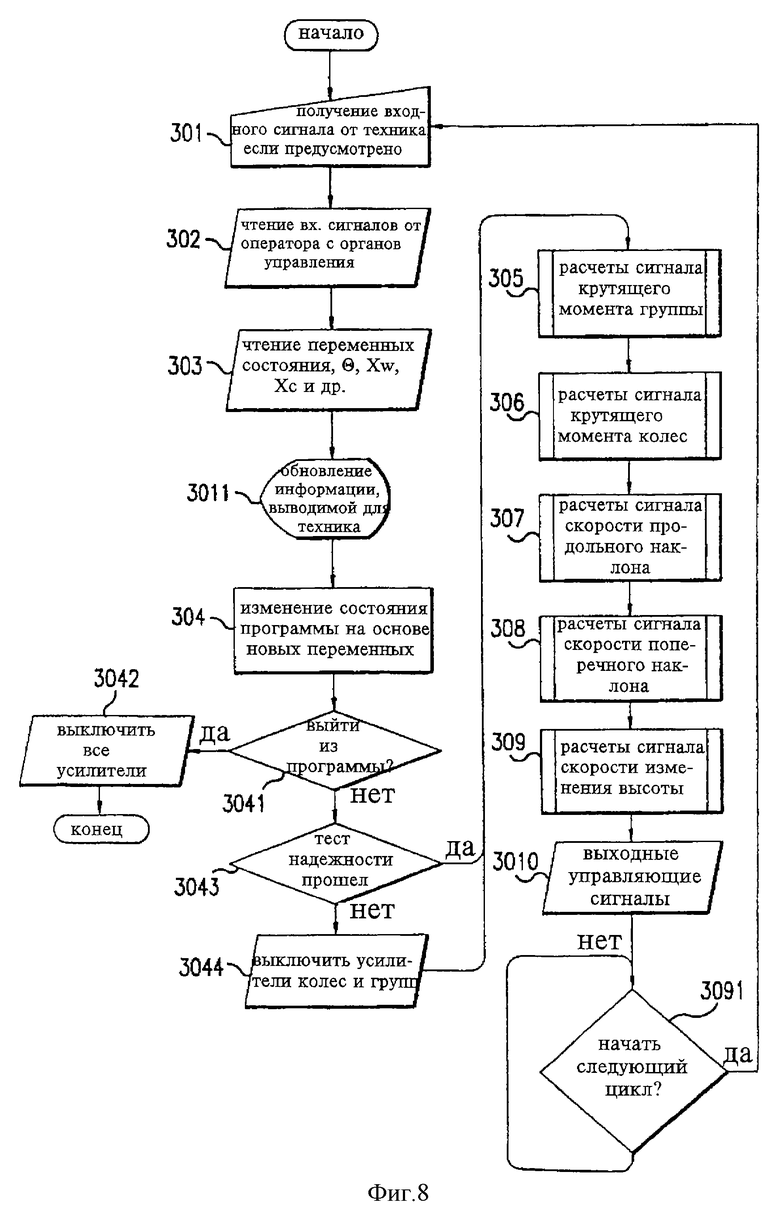
На фиг.8 представлена логическая блок-схема, отражающая алгоритм действия панели 272 с центральным микроконтроллером в ходе одного цикла управления.
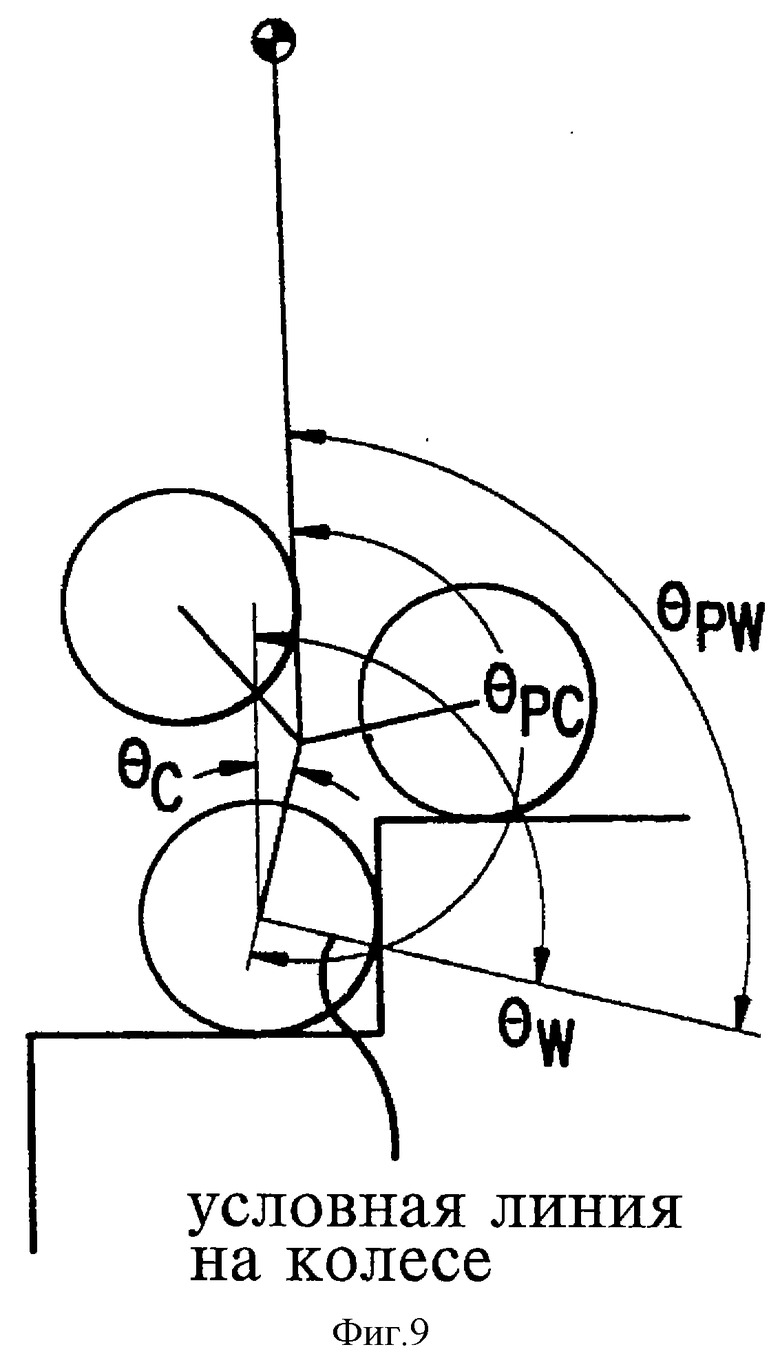
На фиг.9 представлены угловые переменные, касающиеся определения ориентации группы по отношению к транспортному средству и окружающему пространству.
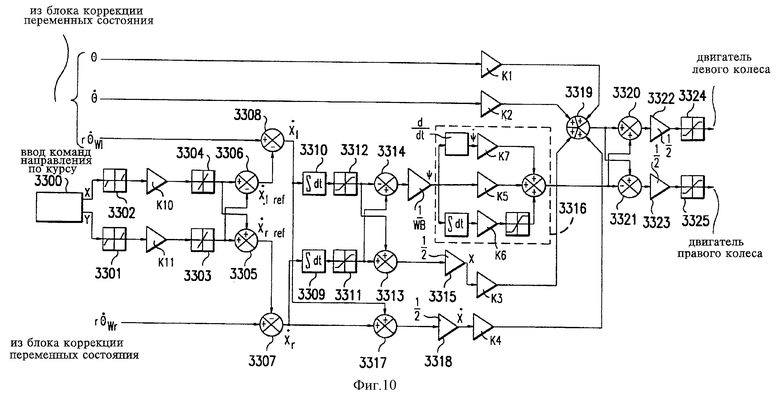
На фиг. 10 схематически представлено управление двигателями колес во время уравновешивания и нормального передвижения.
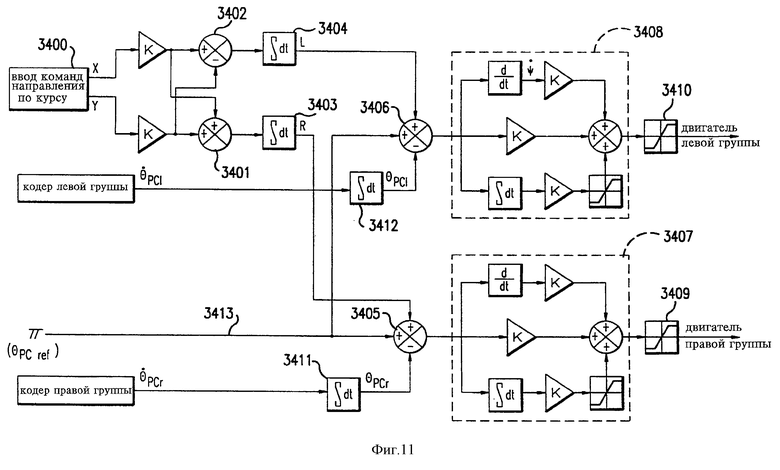
На фиг. 11 схематически представлено устройство управления группами во время уравновешивания и нормального передвижения.
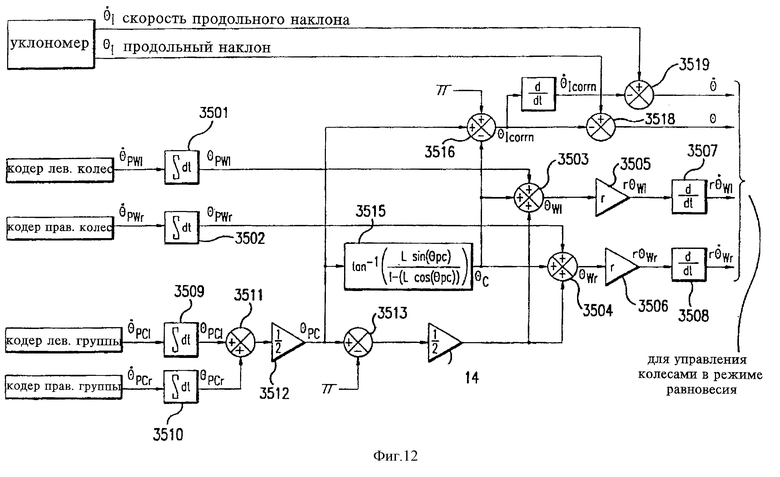
На фиг.12 представлена схема, относящаяся к фиг.10, показывающая устройство, посредством которого определяются переменные состояния, указывающие положение колес, с тем чтобы компенсировать влияние вращения групп.
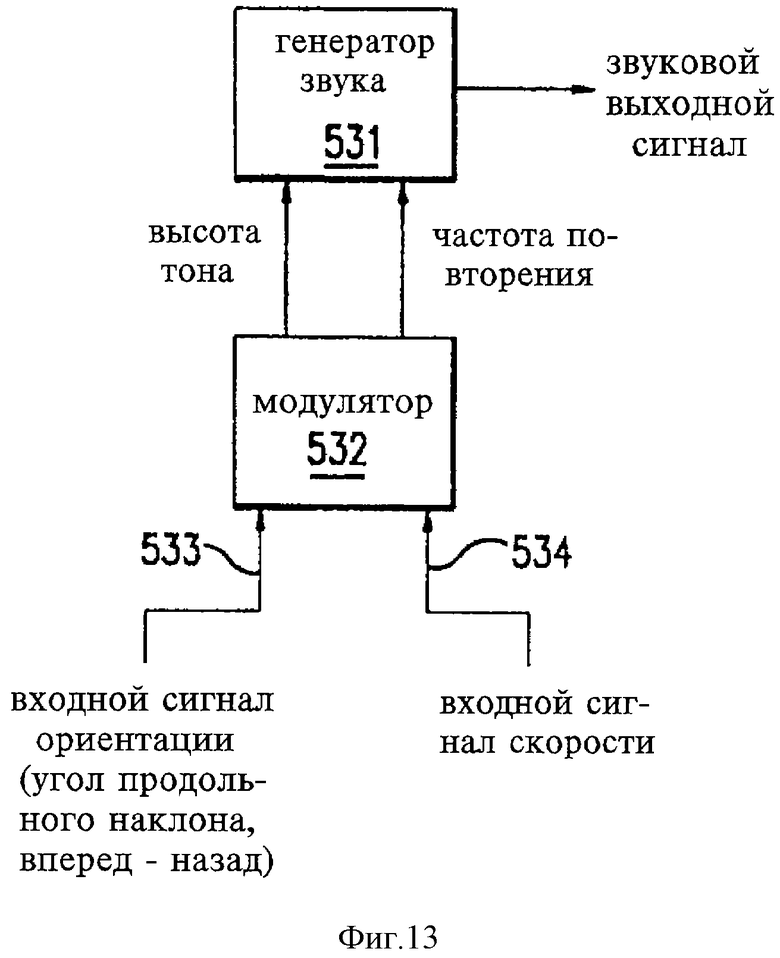
На фиг.13 представлен вариант конструкции изобретения, в котором предусмотрена выработка невизуальных выходных сигналов, с помощью которых человек может управлять транспортным средством.
Сведения, подтверждающие возможность осуществления изобретения
Изобретение может быть выполнено в широком диапазоне вариантов его осуществления. Отличительным признаком многих из этих вариантов конструкции является использование пары расположенных в поперечном направлении вращающихся элементов, соприкасающихся с землей (самые нижние вращающиеся элементы, которые соосно расположены вокруг одной поперечной оси), с тем чтобы разместить над поверхностью человека, относительно которой человек перемещается. Элементы, соприкасающиеся с землей, приводят в движение двигателями.
Во многих вариантах конструкции транспортное средство с находящимся на нем человеком во время передвижения по меньшей мере определенную часть времени имеет недостаточную собственную остойчивость относительно вертикали в продольной плоскости, но при этом оно относительно остойчиво по отношению к вертикали в поперечной плоскости. Продольная остойчивость достигается за счет применения системы автоматического управления, в которую включен двигатель, для работы этого двигателя совместно с элементами, соприкасающимися с землей. Как описано ниже, пара элементов, соприкасающихся с землей, может, например, представлять собой пару колес или пару колесных групп. В этих вариантах выполнения конструкции элементы, соприкасающиеся с землей, приводят в движение приводом от двигателя в системе автоматического управления таким образом, чтобы сохранять центр массы транспортного средства над точкой контакта элементов с землей независимо от возмущений и сил, действующих на транспортное средство.
Вариант транспортного средства 18, показанный на фиг.1, включает в себя опорное устройство 211, в данном случае выполненное в виде платформы, на которой человек 13 может стоять или, в другом варианте, показанном на фиг.2, сидеть. Как показано на фиг.1, человек 13 стоит на платформе 211 и держится за захват 212 на рукоятке 213, прикрепленной к платформе 211, таким образом, что транспортное средство в таком исполнении может действовать подобно самокату. Соприкасающийся с землей модуль 26 транспортного средства включает пару колес 11, расположенных поперечно (боком) друг к другу и по одной и той же оси 22. Колеса помогают определить ряд осей, включая вертикальную ось Z-Z, поперечную ось Y-Y, параллельную оси колес, и продольную ось Х-Х, перпендикулярную оси колес.
Плоскость, задаваемая вертикальной осью Z-Z и поперечной осью Y-Y, в некоторых случаях будет здесь называться "поперечной плоскостью", а плоскость, задаваемая продольной осью Х-Х и вертикальной осью Z-Z - "продольной плоскостью". Направления, параллельные осям Х-Х и Y-Y, называют соответственно продольными и поперечными направлениями. Можно видеть, что транспортному средству, когда оно опирается на пару колес 11 для соприкосновения с землей, свойственна собственная неустойчивость по отношению к вертикали в продольном направлении, однако оно относительно остойчиво по отношению к вертикали в поперечном направлении.
Как показано на фиг.2, человека 13 можно перемещать на платформе 211, усадив его на кресло 34. Кресло 34 может быть установлено с возможностью поворота в шарнире 42 относительно платформы 211, что способствует переносу тяжести тела человека при наклоне, как это рассматривается ниже в качестве возможного способа управления движением транспортного средства. Кресло 34 может быть соединено с платформой 211 посредством рычага 38 и шарнира 40. Можно видеть, что в варианте осуществления конструкции, описанном на фиг. 1-2, для достижения относительной подвижности приходится жертвовать собственной продольной остойчивостью транспортного средства.
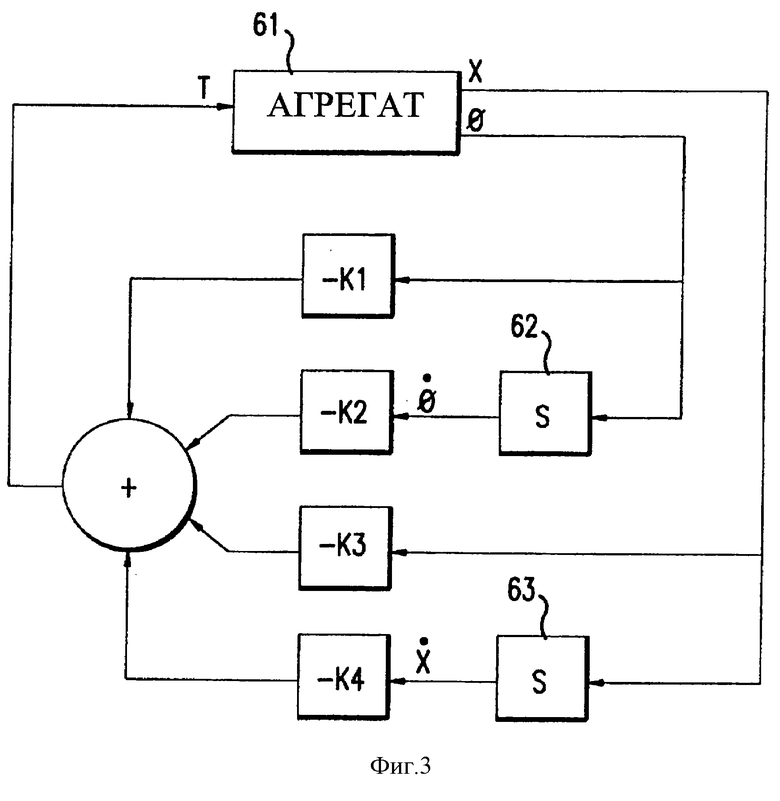
Упрощенный алгоритм управления для обеспечения равновесия в варианте осуществления изобретения согласно фиг. 1, когда колеса задействованы для выполнения движения, представлен на блок-схеме фиг.3. Агрегат 61 эквивалентен уравнениям движения системы с модулем, соприкасающимся с землей и приводимым в движение одним двигателем, перед тем как применяется система автоматического управления. Т обозначает крутящий момент колеса. Буква θ обозначает продольный наклон (угловое отклонение транспортного средства по отношению к силе тяжести, то есть к вертикали), Х обозначает продольное смещение вдоль поверхности относительно базовой точки, а точка над буквой обозначает производную переменной по времени. Остальная часть фигуры представляет собой средство управления, используемое для обеспечения равновесия. Прямоугольники 62 и 63 обозначают дифференцирование. Для выполнения динамического управления с целью обеспечения остойчивости системы, а также для того, чтобы система оставалась вблизи базовой точки на поверхности, крутящий момент Т колеса в этом варианте осуществления конструкции устанавливают таким, чтобы он удовлетворял следующему уравнению:
Коэффициенты К1, К2, К3 и К4 зависят от физических параметров системы и иных факторов, например силы тяжести. Упрощенный алгоритм управления согласно фиг.6 позволяет сохранять равновесие, а также близость к базовой точке на поверхности при наличии возмущений, например, таких, которые изменяют центр массы системы относительно базовой точки на поверхности вследствие движения человека или его контакта с другими лицами или объектами.
Для того, чтобы разместить два колеса вместо одноколесной системы, представленной на фиг.6, крутящий момент, требуемый от левого двигателя, и крутящий момент, требуемый от правого двигателя, можно рассчитывать по отдельности обычным способом, описанным ниже применительно к фиг.10. Кроме того, отслеживание движения как левого, так и правого колеса, позволяет вносить коррекции для предотвращения нежелательного поворота транспортного средства и учитывать различия характеристик между двумя приводными двигателями.
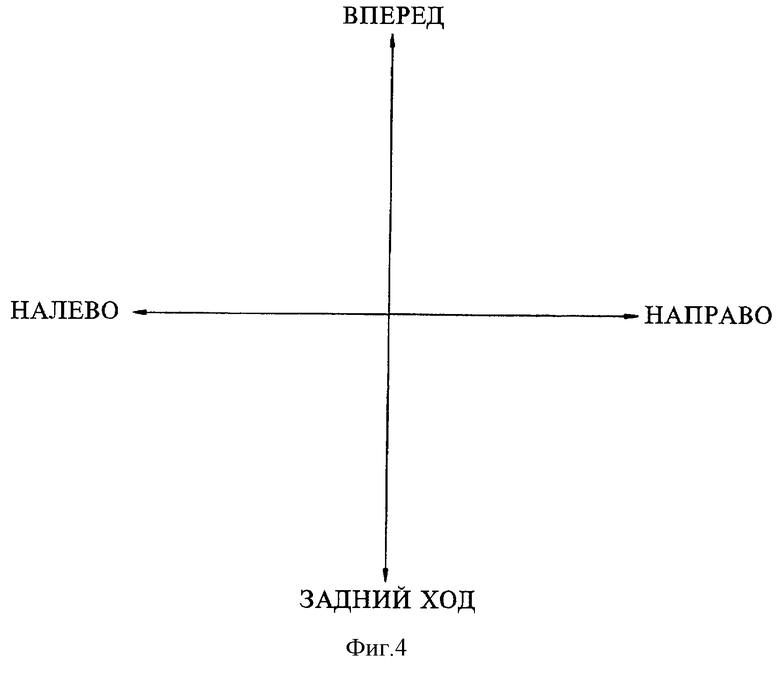
Для регулирования крутящего момента каждого двигателя может быть использован ручной интерфейс, например ручка управления. Ручка управления имеет оси, указанные на фиг.4. При работе этого варианта осуществления конструкции движение ручки управления вперед используют, чтобы обеспечить движение транспортного средства вперед, а обратное движение ручки управления вызывает движение транспортного средства назад. Подобным же образом левый поворот выполняют движением ручки управления влево. Для поворота вправо ручку управления перемещают вправо. Используемая здесь конфигурация обеспечивает возможность поворота транспортного средства на месте при перемещении ручки управления влево или вправо. Что касается движения вперед или заднего хода, то альтернативой воздействию на ручку управления является просто наклон вперед или назад, поскольку в этом случае уклономер или датчик продольного наклона (измеряющий θ) установит изменение угла продольного наклона, которое система будет пытаться скомпенсировать, что приведет к переднему или обратному движению - в зависимости от направления наклона. Как вариант, могут быть воплощены принципы управления, основанные на нечеткой логике.
Можно видеть, что такой подход, предусматривающий регулирование крутящих моментов двигателей в режиме равновесия, обеспечивает возможность получения продольной остойчивости без необходимости использования дополнительных стабилизирующих колес или подпорок (хотя может быть обеспечено и такое содействие остойчивости). Иными словами, остойчивость достигается динамически посредством движения компонентов транспортного средства (в этом случае образующих все транспортное средство) относительно земли.
Следует заметить, что хотя во многих из описанных здесь вариантов осуществления конструкции используют отдельные двигатели с индивидуальным управлением, для определенного количества функций может быть использован общий двигатель, при этом отдельное управление может быть обеспечено соответствующими устройствами сцепления или иными устройствами трансмиссии (передачи энергии), например дифференциальным приводом. Термин "привод от двигателя" (или механический привод), который используется в этом описании и в приведенной далее формуле изобретения, означает любое устройство, вырабатывающее механическую энергию независимо от средств создания энергии, и поэтому включает в себя двигатель, который может быть электрическим, гидравлическим, пневматическим или термодинамическим (последний включает в себя двигатель внутреннего или внешнего сгорания) совместно с любым приемлемым устройством для передачи такой механической энергии, либо устройство, создающее реактивную тягу, например турбореактивный двигатель или приводимый двигателем воздушный винт.
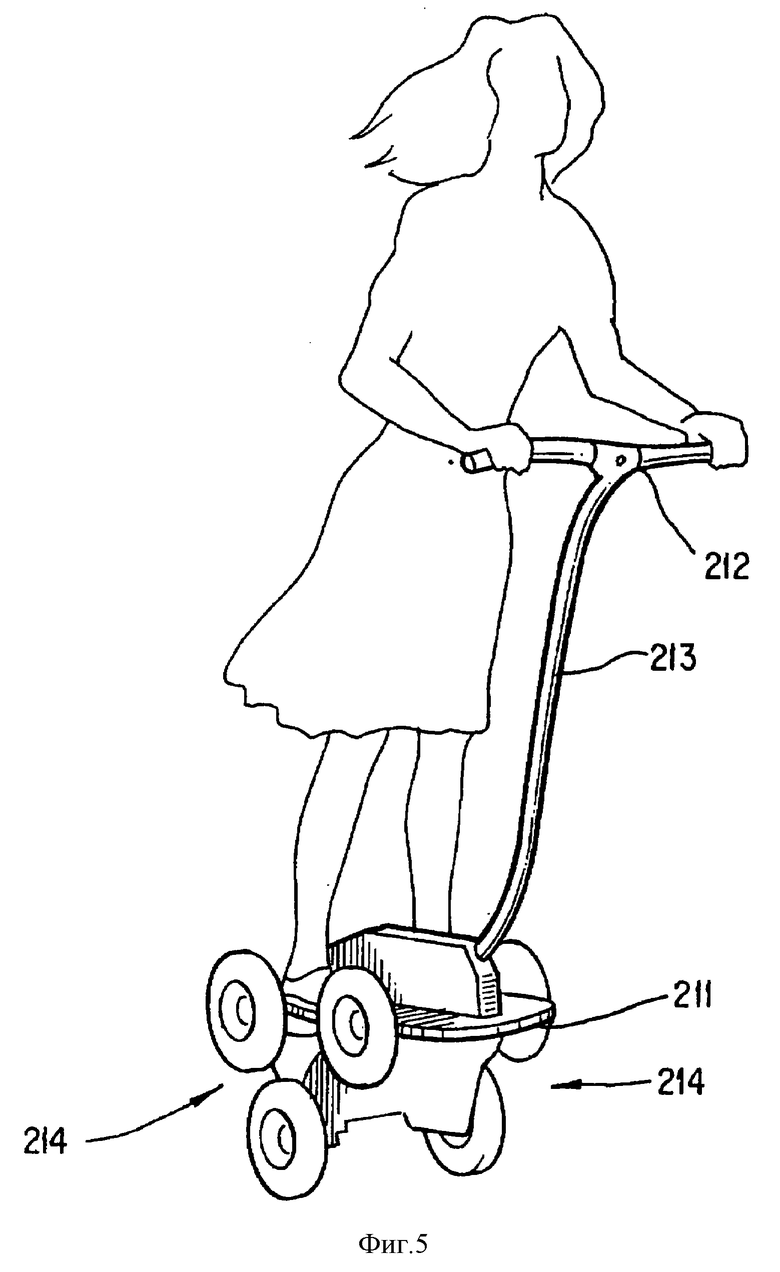
На фиг.5 показан еще один вариант предложенного транспортного средства, в котором не предусмотрено кресло. Человек стоит на платформе 211 и удерживает захват 212 на рукоятке 213, прикрепленной к платформе 211, так что транспортное средство согласно этому варианту осуществления конструкции может действовать способом, аналогичным способу действия самоката. На захвате 212 может быть установлена ручка управления, которой удобно манипулировать большим пальцем руки, для контроля направления движения транспортного средства (управления по курсу), хотя также могут быть использованы и другие способы управления. Например, вполне можно обойтись без рукоятки 213 и захвата 212, а платформа 211 может быть снабжена датчиками, определяющими наклон человека.
Действительно, как описано применительно к фиг.3 и далее описано ниже, угол продольного наклона транспортного средства определяется и корректируется в системе автоматического управления, поэтому, если человек наклоняется вперед, транспортное средство будет перемещаться вперед, с тем чтобы сохранить остойчивость по вертикали. Соответственно наклон вперед вызовет движение вперед, а наклон назад вызовет движение назад. Для восприятия левостороннего и правостороннего наклона могут быть предусмотрены соответствующие преобразователи (датчики) силы, а для выполнения поворота влево или вправо при восприятии соответствующего наклона могут быть предусмотрены связанные с ними органы управления. Наклон также можно фиксировать посредством использования бесконтактных датчиков.
Подобным же образом транспортное средство согласно этому варианту осуществления конструкции может быть оборудовано приводимым в действие ступней (или усилием) переключателем для приведения транспортного средства в действие таким образом, чтобы переключатель был замкнут для автоматического приведения транспортного средства в действие, когда человек стоит на платформе 211. Хотя этот вариант осуществления конструкции показан с левой и правой колесными группами 214, транспортное средство, как вариант, может быть снабжено другими элементами, соприкасающимися с землей, например поперечно расположенной одинарной парой колес, подобных показанным на фиг.1.
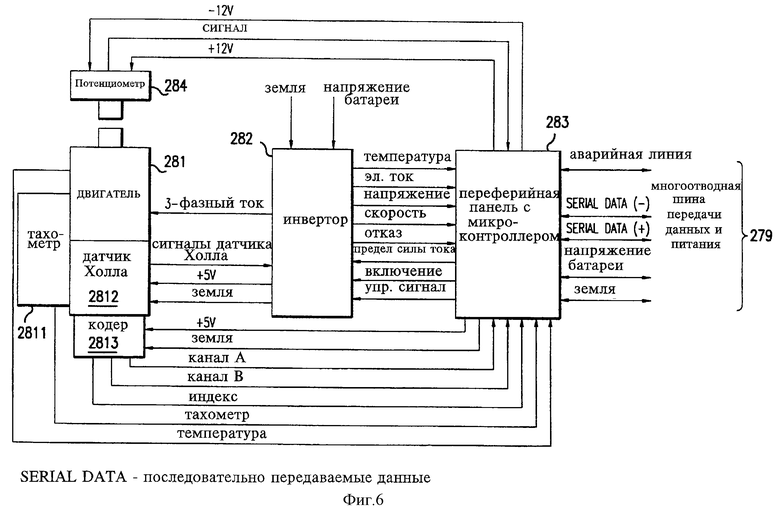
Общая структура каждого из узлов управления колесами показана на фиг.6. Двигатель 281 получает трехфазный ток от инвертора 282. Выход от датчика 2812, действующего на основе эффекта Холла, обеспечивает подачу информационных сигналов к инвертору 282 для управления фазами тока, подводимого к двигателю. Информационные сигналы, относящиеся к вращению вала двигателя или к положению механических систем, приводимых в действие двигателем, могут вырабатываться одним или более из следующих устройств: потенциометром 284, тахометром 2811 или инкрементным кодирующим устройством 2813. (Как вариант, может быть использован сам датчик 2812, действующий на основе эффекта Холла). Эти сигналы подают к периферийной панели (плате) 283 с микроконтроллером. Кроме того, температурные выводы, взаимосвязанные с инвертором 282 и двигателем 281, создают входные сигналы для периферийной панели 283 с микроконтроллером. В свою очередь, периферийная панель 283 с микроконтроллером связана с центральной панелью с микроконтроллером посредством шины 279.
На фиг. 7 приведена блок-схема, дающая подробное представление о блоке интерфейса 273 пользователя. Периферийная панель 291 с микроконтроллером получает сигнал от ручки управления 292, а также от уклономера 293. Уклономер вырабатывает информационные сигналы, касающиеся угла продольного наклона и скорости продольного наклона. (Термин "уклономер", который используют в контексте этого описания и прилагаемой формулы изобретения, означает любое устройство, создающее выходной сигнал, означающий продольный наклон или скорость продольного наклона независимо от схемы, используемой для обеспечения выходного сигнала; если же в качестве выходного сигнала выдается только одна из переменных - продольный наклон или скорость продольного наклона, то другая переменная может быть получена посредством соответствующего дифференцирования или интегрирования по времени).
Когда транспортное средство движется с поворотом, для обеспечения управляемого поперечного наклона транспортного средства в сторону поворота (а следовательно, для повышения устойчивости при повороте) можно также использовать второй уклономер для получения информации, касающейся поперечного наклона или скорости поперечного наклона, или, как вариант, результирующей веса системы и центробежной силы. Желательно также обеспечить другие входные сигналы 294, например входной сигнал к периферийной панели 291 с микроконтроллером. Такие иные входные сигналы могут включать в себя сигналы, вводимые переключателями (кнопками и рукоятками) для регулирования кресла и для установления режима работы (например, режима наклона или режима равновесия, описанных ниже). Периферийная панель 291 с микроконтроллером также имеет входы для получения сигналов от батарейного пакета 271, касающихся напряжения, тока и температуры батареи. Периферийная панель 291 с микроконтроллером посредством шины 279 связана с центральной панелью микроконтроллера.
На фиг.8 представлена логическая схема выполнения операций, которой следует панель с микроконтроллером в ходе выполнения одного цикла управления. Для целей диагностики цикл начинают на стадии 301 проверкой наличия какого-либо входного сигнала от специалиста по техническому обслуживанию (техника). На следующей стадии, обозначенной позицией 302, производят считывание входных сигналов от оператора, создаваемых ручкой управления, переключателями, кнопками и рукоятками. Далее, на стадии 303, в качестве входных сигналов считываются переменные состояния транспортного средства. После этого на стадии 3011 производят обновление отображаемой информации, выдаваемой технику (в случае диагностического использования), и далее, на стадии 304, состояние программы изменяют на основе входных переменных, полученных на стадиях 301-303. Затем выполняют тестирование, есть ли выход программы (стадия 3041), и если определено "да", то все усилители двигателей отключают (стадия 3042), и программа заканчивается.
В ином случае выполняют проверку надежности (на стадии 3043) соответствующих переменных (таких как температура, напряжение батареи и т.д.), и если получают отрицательный результат, то усилители двигателей колес и групп отключают (стадия 3044) и после этого состояние программы изменяют (стадия 3055). Вместе с тем, надлежащим образом используют несколько уровней проверки, с тем чтобы усилители двигателей отключались только после получения условий на грани сигнала тревоги. Если проверка надежности на стадии 3043 положительна, или после изменения состояния программы на стадии 3055, проводят последовательные расчеты для обеспечения сигнала крутящего момента группы (стадия 305), сигнала крутящего момента колес (стадия 306), сигнала скорости продольного наклона (стадия 307), сигнала скорости поперечного наклона (стадия 308) и сигнала скорости изменения высоты подъема (309). Затем результаты этих вычислений выдают в виде выходных сигналов к соответствующим средствам на стадии 3010. На стадии 3091 программа ожидает следующего тактового сигнала, чтобы вновь начать цикл управления. В этом варианте осуществления конструкции частота циклов управления находится в диапазоне 200-400 Гц, который обеспечивает удовлетворительное быстродействие и устойчивость управления.
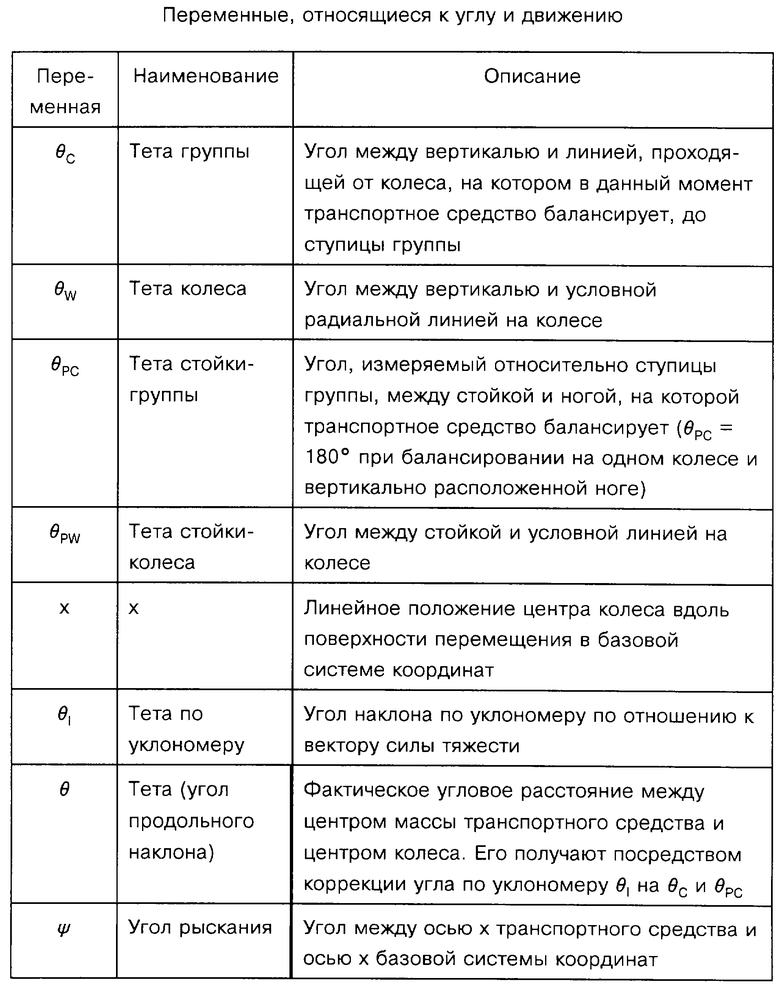
При использовании переменных, указанных в таблице и рассматриваемых в последующем описании, приняты следующие условности:
1. Переменные, определенные в мировой системе координат, именуются с помощью одного прописного подстрочного индекса. Мировая система координат - это система координат, привязанная к Земле (инерциальная).
2. Переменные, определенные в относительной системе координат, именуются с использованием двойного подстрочного индекса. Подстрочные индексы указывают конечные точки переменной. Порядок индексов указывает на знак переменной. Например, θPC представляет собой угол между стойкой и ногой группы, когда вращение по часовой стрелке от стойки группы положительное (см. пункт 4). "Нога" группы - это линейный отрезок от центра группы до центра колеса, на котором транспортное средство балансирует в данный момент. "Стойка" группы - это линейный отрезок от центра массы системы до центра группы.
3. Строчные нижние индексы используют для указания других атрибутов, например левый/правый и т.д.: r=правый; l=левый; ref=базовый; f=конец; s= начало.
4. Все углы положительны в направлении часовой стрелки в тех случаях, когда положительное перемещение происходит в положительном направлении X.
5. Точка над переменной обозначает производную по времени, например 
На фиг. 9 представлены переменные угловых характеристик и характеристик движения, имеющие отношение к определению ориентации группы относительно транспортного средства и пространства. Эти переменные характеризуются так, как указано в таблице.
На фиг.10-12 представлены блок-схемы, показывающие алгоритмы управления, приемлемые для использования совместно с узлами управления согласно настоящему изобретению для обеспечения остойчивости транспортного средства согласно рассматриваемым в заявке вариантам конструкции, при балансировании на паре колес как во время движения, так и в фиксированном положении.
На фиг.10 представлено устройство управления остойчивостью транспортного средства, представляющее собой устройство управления двигателями правых и левых колес. Устройство имеет входы для сигналов  (линейная скорость левого колеса относительно мировой системы координат) и
(линейная скорость левого колеса относительно мировой системы координат) и  (линейная скорость правого колеса) в дополнение к входу 3300 для команд контроля направления по курсу, определяемых положением рукоятки управления по осям Х и Y базовой системы координат.
(линейная скорость правого колеса) в дополнение к входу 3300 для команд контроля направления по курсу, определяемых положением рукоятки управления по осям Х и Y базовой системы координат.
Описываемые ниже входные сигналы  и сигналы рассогласования (ошибки) х и
и сигналы рассогласования (ошибки) х и  умножаемые на коэффициенты усиления соответственно К1, К2, К3 и К4, становятся входными сигналами, идущими к сумматору 3319, который выдает команду в отношении основного уравновешивающего крутящего момента колес, в общем виде, описанным выше со ссылкой на фиг.6. Выходной сигнал сумматора 3319 объединяют с выходным сигналом описываемого ниже пропорционально-интегрально-дифференциального (ПИД) контура регулирования 3316 по рысканию (по курсу) в сумматоре 3320, затем делят в делителе 3322 и ограничивают по предельному значению в ограничителе 3324, с получением сигнала крутящего момента левого колеса. Подобным же образом выходной сигнал сумматора 3319 объединяют с выходным сигналом ПИД-контура 3316 в сумматоре 3321, затем делят в делителе 3323 и ограничивают по предельному значению в ограничителе 3325, с получением сигнала крутящего момента правого колеса.
умножаемые на коэффициенты усиления соответственно К1, К2, К3 и К4, становятся входными сигналами, идущими к сумматору 3319, который выдает команду в отношении основного уравновешивающего крутящего момента колес, в общем виде, описанным выше со ссылкой на фиг.6. Выходной сигнал сумматора 3319 объединяют с выходным сигналом описываемого ниже пропорционально-интегрально-дифференциального (ПИД) контура регулирования 3316 по рысканию (по курсу) в сумматоре 3320, затем делят в делителе 3322 и ограничивают по предельному значению в ограничителе 3324, с получением сигнала крутящего момента левого колеса. Подобным же образом выходной сигнал сумматора 3319 объединяют с выходным сигналом ПИД-контура 3316 в сумматоре 3321, затем делят в делителе 3323 и ограничивают по предельному значению в ограничителе 3325, с получением сигнала крутящего момента правого колеса.
Согласно фиг.10 составляющая команды направления по оси Х перемещает базовую систему координат по ее оси Х относительно мировой системы координат (которая характеризует поверхность передвижения) со скоростью, пропорциональной смещению ручки управления. Составляющая команды направления по оси У поворачивает базовую систему координат вокруг ее оси Z с угловой скоростью, пропорциональной смещению ручки управления. Здесь подразумевается, что движение ручки управления в положительном направлении по оси Х задает движение транспортного средства вперед; движение ручки управления в отрицательном направлении по оси Х задает задний ход.
Подобным же образом движение ручки управления в положительном направлении по оси Y означает поворот влево, против часовой стрелки, если смотреть сверху; движение ручки управления в отрицательном направлении по оси Y означает поворот вправо, по часовой стрелке, если смотреть сверху.
Соответственно команды направления по осям Y и Х вводятся через блоки 3301 и 3302 зон нечувствительности соответственно, чтобы расширить область нейтрального положения ручки управления, затем умножают на коэффициенты усиления К11 и К10, после чего ограничивают по скорости ограничителями соответственно 3303 и 3304, которые ограничивают соответственно угловое и линейное ускорения базовой системы координат. Сумма этих выходных сигналов, получаемая посредством сумматора 3305, становится базовой скоростью  в то время как разность этих выходных сигналов, получаемая посредством сумматора 3306, становится базовой скоростью
в то время как разность этих выходных сигналов, получаемая посредством сумматора 3306, становится базовой скоростью  Эти базовые скорости вычитают в сумматорах 3308 и 3307 из скорректированных входных сигналов
Эти базовые скорости вычитают в сумматорах 3308 и 3307 из скорректированных входных сигналов  линейной скорости левого и правого колес (см. приведенное ниже описание применительно к фиг.12 для этих величии), с тем чтобы получить сигналы
линейной скорости левого и правого колес (см. приведенное ниже описание применительно к фиг.12 для этих величии), с тем чтобы получить сигналы  ошибки скорости для левого и правого колес в пределах базовой системы координат.
ошибки скорости для левого и правого колес в пределах базовой системы координат.
В свою очередь, усредненная величина этих сигналов, определяемая сумматором 3317 и делителем 3318, создает сигнал  рассогласования по линейной скорости. Сигнал рассогласования по перемещению х получают посредством интегрирования
рассогласования по линейной скорости. Сигнал рассогласования по перемещению х получают посредством интегрирования  в интеграторах 3310 и 3309, ограничения результатов по предельным значениям в ограничителях 3312 и 3311 и далее усреднения их выходных сигналов посредством сумматора 3313 и делителя 3315. Разность этих смещений, определяемая посредством сумматора 3314, обеспечивает получение сигнала ψ рассогласования по углу рыскания (отклонения от заданного курса).
в интеграторах 3310 и 3309, ограничения результатов по предельным значениям в ограничителях 3312 и 3311 и далее усреднения их выходных сигналов посредством сумматора 3313 и делителя 3315. Разность этих смещений, определяемая посредством сумматора 3314, обеспечивает получение сигнала ψ рассогласования по углу рыскания (отклонения от заданного курса).
Сигнал ψ рассогласования по углу рыскания проходит через стандартный ПИД-контур регулирования 3316, выходной сигнал которого суммируют с выходным сигналом основного уравновешивающего крутящего момента на сумматоре 3319, с получением команд крутящих моментов отдельных колес, которые управляют колесами так, чтобы сохранять остойчивость в продольном направлении, а также приводят ориентацию транспортного средства к осям базовой системы координат и направляют его относительно начала базовой системы координат согласно входным сигналам (командам) 3300 направления.
На фиг.11 представлена схема устройства управления группами. Управление ориентацией групп можно осуществлять входными сигналами 3400 направления. При необходимости та же самая ручка управления, которую используют для ввода входных сигналов 3300 направления в отношении колес, посредством отдельного выключателя может быть переключена на отдельный режим работы, чтобы обеспечить входные сигналы 3400 направления, задающие ориентацию групп. Способом, в общем аналогичным прохождению сигнала через сумматоры 3306 и 3305 согласно фиг. 10, в данном случае сигналы ручки управления, получаемые при ее положительном смещении в направлении Х складывают, а сигналы, получаемые при положительном смещении в направлении Y, вычитают друг из друга в сумматорах 3402 и 3401, чтобы создать сигналы скорости вращения левой и правой групп, которые после интегрирования в интеграторах соответственно 3404 и 3403 обеспечивают информацию о желательной угловой ориентации группы для сумматоров соответственно 3406 и 3405 левой и правой групп.
При отсутствии входных сигналов 3400 направления предпочтительную ориентацию групп, обычно с θPCref=π радиан, обеспечивают по линии 3413 фиг.11 для каждого из сумматоров 3406 и 3405 совместно с сигналами, указывающими фактическую ориентацию θPCl и θPCr групп (получают посредством прохождения сигналов угловой скорости группы от кодирующих устройств левой и правой групп через интеграторы соответственно 3412 и 3411). Поэтому выходные сигналы сумматоров 3406 и 3405 представляют собой сигналы рассогласования по положению соответственно для левой и правой группы. Эти сигналы подают через ПИД-контуры регулирования 3408 и 3407, и ограничители 3410 и 3409 по предельным значениям для приведения в действие двигателей левой и правой групп.
На фиг. 12 представлена схема, относящаяся к фиг.10 и показывающая устройство, посредством которого определяют переменные состояния, указывающие положение колес, угол продольного наклона и скорость продольного наклона для компенсации влияния поворота групп. Как указано в таблице, угол θ продольного наклона представляет собой реальный угол между центром массы транспортного средства и центром колеса, на котором транспортное средство балансирует в данный момент. Угол θl, измеренный уклономером, представляет собой угол стойки по отношению к вертикали. Следовательно, действительный угол θ продольного наклона основан на θl, из которого корректирующий сигнал θlcorr вычитают сумматором 3518.
Сигнал θlcorr вычисляют в сумматоре 3516 как θPC+π-θC. Сигнал θPC определяют как среднее углов θPCl и θPCr от левой и правой стойки к группе, получаемых от интегрирования в интеграторах 3509 и 3510 выходных сигналов кодирующих устройств левой и правой групп; среднее получают путем использования сумматора 3511 и делителя 3512. Если допустить, что транспортное средство уравновешено, то θC может быть получен из θPC с использованием формулы
Это вычисление производят на участке 3515. θlcorr дифференцируют посредством дифференциатора 3517, чтобы обеспечить корректировку сигнала  скорости продольного наклона, который подают сумматором 3519, с получением скорректированного выходного сигнала
скорости продольного наклона, который подают сумматором 3519, с получением скорректированного выходного сигнала 
Подобным же образом линейные левую и правую скорости  левого и правого колес получают дифференцированием посредством дифференциаторов 3507 и 3508 полученных сигналов
левого и правого колес получают дифференцированием посредством дифференциаторов 3507 и 3508 полученных сигналов  линейного левого и правого положения. Сигналы положения, в свою очередь, получают умножением на коэффициент r в множительных устройствах 3505 и 3504 для определенных абсолютных угловых положений θWl и θWr левого и правого колес. Угловые положении θWl и θWr определяют первым интегрированием сигналов
линейного левого и правого положения. Сигналы положения, в свою очередь, получают умножением на коэффициент r в множительных устройствах 3505 и 3504 для определенных абсолютных угловых положений θWl и θWr левого и правого колес. Угловые положении θWl и θWr определяют первым интегрированием сигналов  кодирующих устройств левого и правого колес в интеграторах 3501 и 3502 для получения θPWl и θPWr. Затем эти сигналы подают к сумматорам 3503 и 3504, где их корректируют с учетом вращения групп путем добавления θC и величины 1/2(θPC-π), получаемых от сумматора 3513 и делителя 3514.
кодирующих устройств левого и правого колес в интеграторах 3501 и 3502 для получения θPWl и θPWr. Затем эти сигналы подают к сумматорам 3503 и 3504, где их корректируют с учетом вращения групп путем добавления θC и величины 1/2(θPC-π), получаемых от сумматора 3513 и делителя 3514.
Ограничение скорости.
Еще в одном варианте любой из представленных выше вариантов конструкции транспортного средства согласно настоящему изобретению может быть выполнен с ограничением скорости для сохранения равновесия и управления, которые были бы потеряны, если бы колеса (или дугообразные элементы) достигли максимальной скорости, с которой они могли бы быть приведены в движение в данный момент.
Ограничение скорости осуществляют посредством обратного продольного наклона транспортного средства в направлении, противоположном текущему направлению перемещения, что вызывает замедление транспортного средства. В этом варианте обратный наклон транспортного средства выполняют добавлением корректирующего изменения угла продольного наклона к значению угла продольного наклона по уклономеру. Ограничение скорости происходит в любом случае, когда скорость транспортного средства превышает пороговое значение, которое определяет предел скорости транспортного средства. Величину корректирующего изменения угла продольного наклона определяют в зависимости от интегрируемой по времени разности между скоростью транспортного средства и определенным пределом скорости. Циклическую коррекцию продольного наклона сохраняют до тех пор, пока не произойдет замедление транспортного средства и падение скорости до заданного значения (скорости, которая несколько ниже предельной), после чего значение угла продольного наклона плавно возвращается к своей первоначальной величине.
Одним из способов определения предела скорости транспортного средства является отслеживание напряжения батареи, результаты которого затем используют для оценки максимальной скорости, которую транспортное средство может сохранять в данный момент. Другой способ заключается в измерении напряжения на батарее и двигателе и контроле их разности; эта разность обеспечивает возможность оценки величины запаса по скорости, имеющегося у транспортного средства в данный момент.
Несколько процессоров
Хотя предшествующие варианты изобретения описаны с точки зрения применения одной панели с микроконтроллером, в некоторых вариантах конструкции мы считаем перспективным использование нескольких параллельно работающих микропроцессоров. Еще в одном варианте конструкции используют четыре разных микропроцессора, действующих параллельно, каждый из которых выдает сообщение на шину обмена данными, что позволяет микропроцессорам контролировать друг друга. Также предусмотрен интерфейс специалиста по техническому обслуживанию, позволяет специалисту изменять коэффициенты усиления, перепрограммировать процессор и т.д.
Четыре разных процессора управляют разными компонентами системы следующим образом: микропроцессор 1 управляет кнопкой коленного и бедренного соединений и ручкой управления (по осям Х и Y); микропроцессор 2 управляет измерением расстояния, проверкой наличия (человека), контролем батарей и интерфейсом пользователя (тем самым управляя режимами транспортного средства); микропроцессор 3 управляет алгоритмом балансирования посредством групп; микропроцессор 4 управляет алгоритмом балансирования посредством колес. При необходимости в зависимости от сложности измерения расстояния и других проблем могут быть применены и другие процессоры. При этом нет необходимости в ограничении количества процессоров.
Преимущества параллельной обработки, реализуемой этим вариантом, таковы: надежность (каждый микропроцессор действует независимо, так что нарушение работы одного микропроцессора не означает нарушения всех функций); возможность более легкой разработки резервных систем; пониженные энергетические требования (несколько менее мощных микропроцессоров, которые совместно обладают такой же энергоемкостью, как и персональный компьютер); одновременная работа (несколько более медленных микропроцессоров могут действовать с такой же скоростью обработки данных, как у персонального компьютера).
Дополнительные варианты осуществления изобретения.
Настоящее изобретение также может быть выполнено в ряде дополнительных вариантов конструкции. Нами установлено, что транспортное средство согласно изобретению может надлежащим образом действовать в качестве протеза для лиц с нарушенной вследствие какого-либо заболевания (например, болезни Паркинсона или нарушения слуха) или дефекта способностью сохранять равновесие или выполнять передвижение. Протез, которым становится предложенное транспортное средство, функционирует как продолжение собственных систем равновесия и движения человека, поскольку транспортное средство имеет контур обратной связи, который учитывает изменения положения центра тяжести транспортного средства, связанные с перемещением человека относительно него.
Таким образом, предоставление транспортного средства такого рода инвалиду является способом оснащения его протезом, позволяющим осуществлять управление движением и равновесием, которое в ином случае было бы невозможным. Мы наблюдали волнующее восстановление возможности управления равновесием и передвижением у лиц, страдающих болезнью Паркинсона, которые использовали транспортное средство согласно вариантам осуществления настоящего изобретения.
Если принять во внимание сложную роль оператора при использовании различных вариантов осуществления транспортного средства для обеспечения передвижения при изменяющихся условиях, не удивительно, что вообще и при использовании этих вариантов обычно весьма важна визуальная ориентация и информация о перемещении. Тем не менее могут иметь место обстоятельства, когда получение визуальной информации или ухудшено (из-за темноты или инвалидности), или недостаточно. Еще в одном варианте осуществления конструкции согласно изобретению в транспортном средстве применены один или несколько невизуальных выходных сигналов для индикации ориентации или направления и скорости. Такие выходные сигналы могут быть осязаемыми (тактильными) или акустическими (звуковыми); выходные сигналы модулируют посредством модулятора для отображения скорости и ориентации транспортного средства.
На фиг.13, например, показан случай акустического выходного сигнала, создаваемого генератором 531 и модулируемого модулятором 532, имеющим вводы 533 и 534 соответственно для сигналов скорости и ориентации. В этом случае может быть применен повторно воспроизводимый звуковой сигнал, где частота повторения звука может быть использована для индикации скорости, а высота звука может быть использована для указания направления движения и ориентации (например, вперед с более высоким звуком; назад с пониженным, а вертикально - со средним звуком), при этом степень изменения высоты звука указывает на степень наклона, то есть угол продольного наклона транспортного средства (используя эффект сопоставления высоты звука с углом продольного наклона транспортного средства).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) И СПОСОБ КОМПЕНСАЦИИ НЕДОСТАТОЧНОЙ СПОСОБНОСТИ ЧЕЛОВЕКА, СТРАДАЮЩЕГО НАРУШЕНИЕМ РАВНОВЕСИЯ, СОХРАНЯТЬ РАВНОВЕСИЕ | 1995 |
|
RU2153868C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2245267C2 |
| МЕХАНИЗМ ПРОТИВ ОПРОКИДЫВАНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2190382C2 |
| СИСТЕМА РОЗЛИВА С ДОЗИРОВАНИЕМ ПРОДУКТОВ | 2009 |
|
RU2506223C2 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ | 2008 |
|
RU2495473C2 |
| НАСОСНЫЕ СИСТЕМЫ ДОСТАВКИ ТЕКУЧИХ СРЕД И СПОСОБЫ ПРИМЕНЕНИЯ УСТРОЙСТВА ПРИЛОЖЕНИЯ УСИЛИЯ | 2007 |
|
RU2447905C2 |
| СИСТЕМА И СПОСОБ ГЕНЕРИРОВАНИЯ ВОЗБУЖДАЮЩЕГО СИГНАЛА | 2008 |
|
RU2552171C2 |
| СИСТЕМА И СПОСОБ RFID | 2008 |
|
RU2503100C2 |
| НАСОСНАЯ СИСТЕМА, ИМЕЮЩАЯ КАЛИБРОВОЧНУЮ КРИВУЮ | 2007 |
|
RU2435984C2 |
| СИСТЕМА ВЫДАЧИ ПРОДУКТА | 2008 |
|
RU2482055C2 |
Изобретение относится к транспортным средствам и способам транспортирования объектов, в частности, по местности, поверхность которой может быть неровной. Транспортное средство содержит опору для транспортируемого объекта, пару поперечно расположенных колес, соединенных с опорой и выполненных с ней в едином узле, привод от двигателя, установленный на указанном узле и соединенный с колесами. Система автоматического управления снабжена средством выработки сигналов рассогласования по скорости и перемещению транспортного средства, средством выработки сигналов угла продольного наклона и угловой скорости продольного наклона транспортного средства, а также снабжена суммирующим устройством, входы которого связаны соответствующими выходами указанных средства выработки сигналов рассогласования по скорости и перемещению и средства выработки сигналов угла продольного наклона и угловой скорости продольного наклона, а выход которого связан с приводом от двигателя. Второй вариант выполнения транспортного средства отличается от первого колеса объединением колес в две группы, установленные с возможностью поворота вокруг оси, проходящей через центры групп, наличием привода от двигателя, включающего в себя двигатель привода колес и двигатель привода групп. Техническим результатом данного изобретения является способность транспортного средства динамически сохранять равновесие на месте или в движении, в том числе по лестницам, посредством привода на колеса. 2 с. и 39 з.п. ф-лы, 13 ил., 1 табл.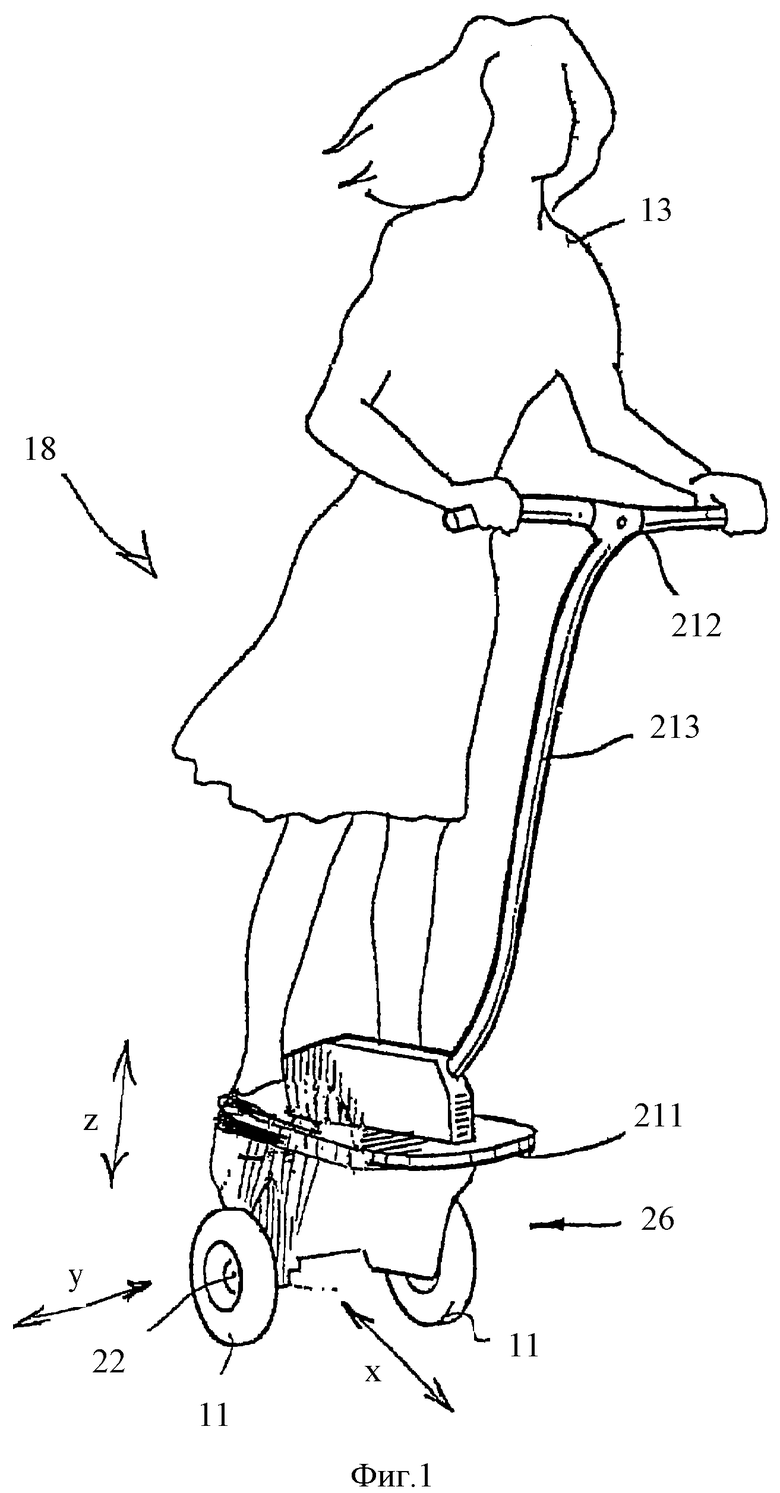
| US 3374845, 26.03.1968 | |||
| Ручная тележка для перемещения по лестницам | 1980 |
|
SU948734A1 |
| Способ изготовления слоистых изделий из бетона | 1973 |
|
SU455855A1 |
| Кресло-коляска | 1988 |
|
SU1527065A1 |

