Предложение относится к пусковым установкам наземного, воздушного или надводного базирования и может быть использовано для запуска ракет в пусковых трубах из состава переносного зенитного ракетного комплекса (ПЗРК) типа "Игла".
Известна спаренная установка для запуска зенитных ракет индивидуального пользования, содержащая основание с обоймой, поворотную часть с сиденьем, качающуюся часть с элементами крепления пусковых труб, механизмами перевода рукоятки привода управления запуском каждой ракеты и селектором запуска, выполненным в виде рукоятки со спусковым рычагом и переводчиком режима стрельбы и распределителя, кинематически связанного со спусковым рычагом и с механизмом перевода рукоятки привода управления запуском каждой ракеты, см. патент РФ 2088877, выданный по заявке 95119765, МПК 6 F 41 A 23/34, F 41 F 3/04.
Установка может монтироваться на основании с раздвижными станинами при стрельбе с грунта или на транспортном средстве, снабженным однотипным узлом крепления. Установка обеспечивает размещение двух ракет в пусковых трубах и их одновременный или последовательный запуски непосредственно оператором, а также при возникшей необходимости их использование без каких-либо изменений для запуска с плеча оператора. Для использования с воздушного транспортного средства не предназначена.
Известен комплекс "Мистраль" вертолетного базирования, содержащий одну или две пусковые установки на борту вертолета, каждая из которых включает две ракеты с тепловыми головками самонаведения и общей системой охлаждения фотоприемников. Обтекатель каждой головки самонаведения защищен механически раскрывающейся лепестковой крышкой. Комплекс включает также органы управления пуском и систему контроля с блоком интерфейса, обеспечивающим взаимодействие ракет и систем оружия вертолета, см. В. Викторов, Французские ЗРК "Мистраль", Зарубежное военное обозрение, 1987, 4, журнал Aviation Week, 1985, т. 122, 2, с. 70; Проспект комплекса воздух-воздух "Мистраль" фирмы MATRA DEFENSE; НТИ, 7-8, 1996, c. 46-49.
Наиболее близким аналогом (прототипом) является пусковой модуль (ПМ) воздушного базирования по патенту США 4429611, МПК F 41 F 3/04. ПМ предназначен для запуска с летательного аппарата ракет ПЗРК "Стингер" и включает центральный несущий каркас со средствами крепления к летательному аппарату, узлы крепления ложементов для пусковых труб со средствами быстрого раскрепления и направляющей для быстрой установки пусковых труб с ракетами в нужном положении и крепления с помощью средств соединения с системой электроснабжения и системой подачи охладителя на пусковую трубу.
Каркас ПМ состоит из удлиненного центрального U-образного канала, в полости которого размещены баллон с охладителем (сжатым газом), источник питания, устройство управления и другие элементы.
Пусковые трубы с ракетами расположены по обе стороны от центрального канала и находятся в двух снабженных замками (хомутами) опорах - передней и задней. Каждый передний замок состоит из неподвижного ложемента и подвижного элемента, который удерживается в требуемом положении винтами с барашками. Подвижные элементы прилегают к неподвижным ложементам и открываются наружу таким образом, что обеспечивается доступ к пусковым трубам с боковых сторон.
Задняя опора имеет аналогичную конструкцию. Подвижные элементы-крышки вращаются относительно осей в неподвижных ложементах и удерживаются на своих местах барашковыми винтами. Возможность поворота крышек позволяет извлекать пусковую трубу из ПМ движением вниз и в сторону. Это позволяет снаряжать ПМ, стоя сбоку, избегая ситуаций, когда снаряжающий оператор находится впереди или позади пусковой трубы с ракетой.
Направляющая для пусковой трубы включает ложементы с установленными на подпружиненных плунжерах плавающими контактными группами. Штыри контактной группы входят в соединение с плоскими отверстиями в кронштейнах для соответствующей пусковой трубы. Эти кронштейны предусмотрены штатной конструкцией пусковых труб для подключения пускового механизма при проведении оператором пуска с плеча. Направляющие служат для выравнивания трубы в осевом направлении и придания ей положения в осевом направлении относительно корпуса, при котором можно перевести трубу в зафиксированное положение, повернув ее вверх, и одновременно добиться подключения ее к гнезду подачи газа в систему и к разъемам электронной системы управления.
На каждой трубе ракеты предусмотрен замок, имеющий в своем составе прихват, который установлен на оси в кронштейне и снабжен рычагом для открывания замка. Прихваты замков входят в зацепление со штатными кронштейнами на передних частях пусковых труб.
ПМ содержит средства управления электроникой и средства задействования для проведения пуска соответствующей ракеты через кабельную связь с пультом оператора в кабине летательного аппарата, что позволяет пилоту или оператору производить пуск ракеты по выбору. При адаптации системы для использования ракет других типов производится доработка блока управления при помощи вставки других плат известным способом.
Система охлаждения тепловых головок самонаведения включает баллон с охлаждающим газом. Гнездо для подачи газа подключает газовый баллон к системе, в состав которой входит магистраль для распределения газа через две раздельные линии и подключения через управляемые электрически клапаны к соответствующей трубе. Электронная система контроля ПМ расположена в центральном канале и включает блок источника питания, соединенный с блоком управления, а также схемы, необходимые для задействования и управления работой головки самонаведения и системой наведения ракеты. Описание электронной системы не приводится. В блок коммутации входит предохранительная чека, исключающая пуск до тех пор, пока ПМ не будет полностью снаряжен и готов к взведению. При взведении ПМ чека вынимается из пускового модуля.
Каждая из пусковых труб с обоих концов закрыта защитными крышками, которые сбрасываются автоматически при запуске ракеты (за счет каких действия не разъясняется).
Упомянутый ПМ, предназначенный для последовательных пусков с воздушных носителей ракет такого вида ("Стингер"), не может быть из-за конструктивных различий использован для пусков широко распространенных ракет из состава ПЗРК типа "Игла" и не обеспечивает возможность залповой стрельбы одновременно двумя ракетами, что часто является необходимым в силу недостаточной эффективности воздействия одной сравнительно маломощной боевой части по современной высокозащищенной цели. Все управление запуском ракет фактически осуществляется оператором вручную.
Техническим результатом предложения является возможность запуска ракет из состава ПЗРК типа "Игла" (в том числе с использованием штатных наземных блоков электрогазового питания ПЗРК) как в режиме одиночной стрельбы, так и в режиме залповой стрельбы двумя ракетами одновременно с упрощением работы оператора за счет передачи отдельных операций при запуске ракет аппаратуре управления. Основным режимом работы является залповая стрельба. Предлагаемая система дает возможность осуществлять стрельбу ракетами семейства "Игла" (включая все известные модификации) с различных типов носителей: вертолет, БМП, БТР, катер, при минимальных доработках системы, связанных с условиями конкретного ее размещения на носителе, а также позволяет использовать штатные НБП от пехотного комплекса.
Это достигается тем, что в систему для запуска ПЗРК, содержащую ПМ, каждый из которых включает полую силовую балку с несущими опорами, центрирующими элементами для установки на носителе и с хомутами для закрепления по сторонам балки пусковых труб с ракетами из состава ПЗРК, механизмы расстопорения ракет, защитные передние крышки с механизмами их открывания, при этом каждый ПМ имеет газовую магистраль подачи через подводящий штуцер сжатого газа к оптической головке самонаведения (ОГС) ракеты, средства подключения ракет к ПМ, пульт дистанционного управления (ПДУ), а также размещенную в полости балки электронику управления ПМ, введен электронный модуль управления и связи (МУиС), подключенный к ПДУ и электрически связанный с каждым ПМ, при этом все ПМ снабжены приемными устройствами, аналогичными приемным устройствам для подстыковки наземных блоков электрогазового питания (НБП), механизмы расстопорения ракет и поворота защитных крышек выполнены в виде пневмоприводов, газовые магистрали присоединены через обратные клапаны к приемным устройствам, каждый подводящий штуцер снабжен механизмом фиксации и соединен с газовой магистралью через электропневмоклапан (ЭПК) выбора ракеты, к выходу которого подсоединены пневмопривод открывания защитной крышки и через дополнительный ЭПК - механизм расстопорения этой ракеты. МУиС содержит блок связи с ПМ, блок связи с ПДУ, блок выбора ПМ для работы и управления ПМ, блок формирования залпа, блок формирования запроса на ПДУ на задействование следующего НБП и ракеты и блок формирования сообщения на ПДУ о состоянии ПМ, ракет и всей системы. При наличии на носителе измерителя угловой скорости МУиС может включать блок анализа угловой скорости для повышения помехозащищенности при автоматическом захвате цели и при залповой стрельбе. Электроника управления ПМ содержит блок управления ПМ, блок управления захватом цели и пуском ракеты, блок выбора и задействования НБП, включающий пружинные механизмы взведения и электромагнитные ударно-спусковые механизмы для вскрытия герметизирующих мембран НБП, размещенные в приемных устройствах для установки НБП, и управления ЭПК пневмоприводов защитных крышек, ЭПК пневмопривода механизма расстопорения ракеты, блок задержки старта ракеты, датчики положения защитных крышек и стопоров, датчики наличия НБП и их задействования. Датчики положения защитных крышек и датчики положения стопоров ракет содержат последовательно соединенные элементы коммутации запальной цепи стартового двигателя. Каждый из ПМ снабжен съемной подковообразной чекой, блокирующей несанкционированный пуск, которая выполнена в виде подковообразной скобы, препятствующей при ее наличии открыванию защитных крышек ПМ. Устройства для электрической подстыковки ракет выполнены в виде направляющего подпружиненного кожуха с центрирующим отверстием. Несущие опоры каждого ПМ имеют снизу и сверху центрирующие элементы для точной установки на носителе нескольких ПМ с возможностью расположения их один под другим ("этажеркой", "гроздью"), а также рядами. При размещении на различных носителях при необходимости вносятся изменения в блок связи МУиС с ПДУ для обеспечения адаптации.
Сущность предложения поясняется чертежами и схемами.
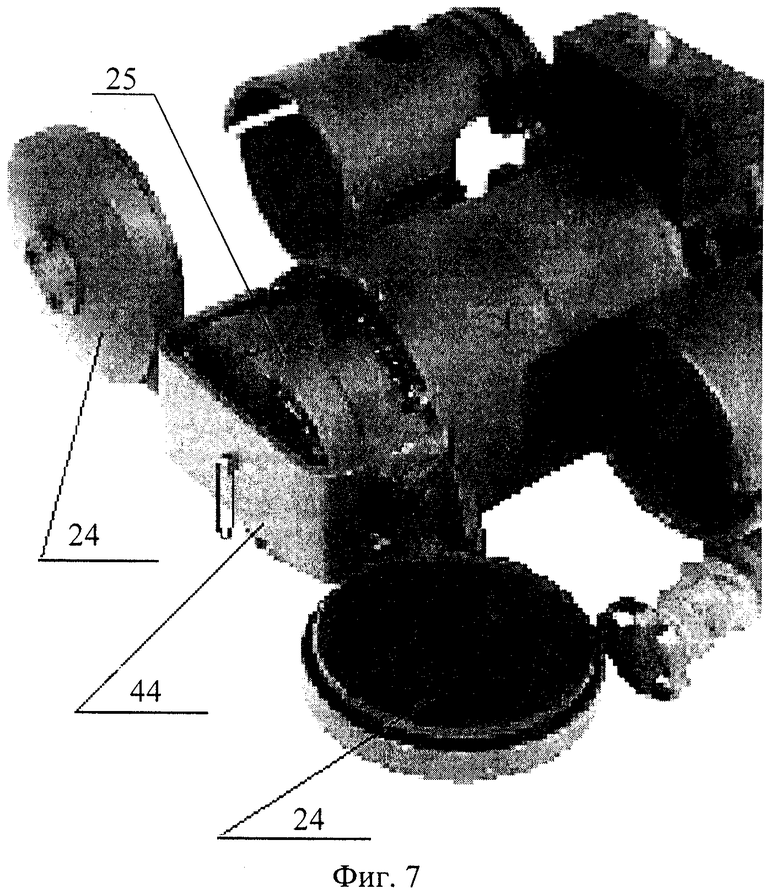
На фиг. 1 приведена блок-схема системы для автоматизированного запуска ракет типа "Игла", на фиг.2 изображен общий вид ПМ, на фиг.3 показана функциональная схема ПМ, на фиг.4 - общий вид приемных устройств для подключения НБП, на фиг.5 - общий вид устройства для электрической подстыковки пусковых труб от ПЗРК с ракетами, на фиг.6 - общий вид механизма расстопорения ракет и общий вид подводящего штуцера, на фиг.7 - общий вид защитных передних крышек и чеки.
Предлагаемая система (см. фиг.1) для автоматизированного запуска ракет из состава ПЗРК типа "Игла" включает в себя от одного до нескольких ПМ 1 (предпочтительно не менее двух). На фиг.1 для примера показана система, содержащая четыре модуля, по два на левом и правом борте носителя. Пусковые модули электрически связаны с МУиС 2. Для связи ПМ с МуиС использована шинная архитектура. Адресация ПМ в зависимости от их положения на носителе производится перемычками на кабельных разъемах.
МУиС электрически соединен с ПДУ 3, с которого оператором осуществляется управление запуском ракет. Конкретное исполнение ПДУ зависит от типа носителя и имеющегося на нем оборудования и, как минимум, содержит блок питания (БП) 4 (27 В) с органами для его включения, кнопку 5 (Зап НБП) для задействования НБП, кнопку 6 (РПуска) для выдачи команды "Разрешение запуска ракет". Для этих команд управления предпочтительнее применять кнопки, так как с помощью них выдаются кратковременные команды. Более длительной будет команда от кнопки 6 "Разрешение запуска ракет".
В предпочтительном варианте ПДУ 3 должен иметь блок индикации 7 (БИндик) для контроля работы системы. В качестве этого блока может служить многофункциональный дисплей управления оружием на носителе или это могут быть звуковые и световые индикаторы, получающие информацию от МУиС 2 и органов управления. ПДУ 3 имеет блок связи 8 (БСв ПДУ МУиС) для подключения к МУиС 2. Через этот блок двухсторонней связи (в предпочтительном варианте в виде последовательной асинхронной линии связи) МУиС и ПДУ производят обмен информационными сигналами известным способом. В составе ПДУ может быть подключаемый к блоку связи 8 блок дополнительных команд и сообщений управления 9, например, для осуществления контроля системы для автоматизированного запуска и передачи на МуиС информации о параметрах цели с устройств носителя.
МУиС содержит:
двухсторонний блок связи 10 (БСв МУиС ПДУ и БфорСообщ на ПДУ) с ПДУ, в состав которого входит блок формирования сообщений на ПДУ;
двухсторонний блок связи 11 (БСв МУиС ПМ) с ПМ;
блок 12 (БвыборПМ и Управления) выбора ПМ и управления ПМ;
блок 13 (БформировЗалпа) формирования команды на одновременный сход двух ракет в режиме залповой стрельбы;
блок 14 (БЗапросНБП) формирования запроса на ПДУ на задействование ракеты и (или) НБП, а также
блок фильтров и стабилизаторов 15 (БФильтров и Стабилизаторы), который соединен с блоком питания 4 ПДУ по входу и с ПМ 1 по выходу.
Для работы с носителями, имеющими блоки, дающие информацию о параметрах движения цели, дальности до цели и ее угловой скорости, например РЛС, МУиС содержит блок 16 (БАнализУглСкор) анализа величины угловой скорости, поступающей с ПМ 1 и со средств носителя через ПДУ от блока 9.
Блоки 6, 10, 11, 12, 13, 16 выполнены на микроконтроллерах типа 1830ВЕ51. Примеры выполнения различных блоков с использованием микроконтроллеров приведены, например, в книге В.В. Сташин, А.В. Урусов "Проектирование цифровых устройств на однокристальных микроконтроллерах", Москва, Энергоавтоиздат, 1990г. Асинхронные последовательные линии связи выполнены с использованием стандартных микросхем приемопередатчиков по протоколу RS-422.
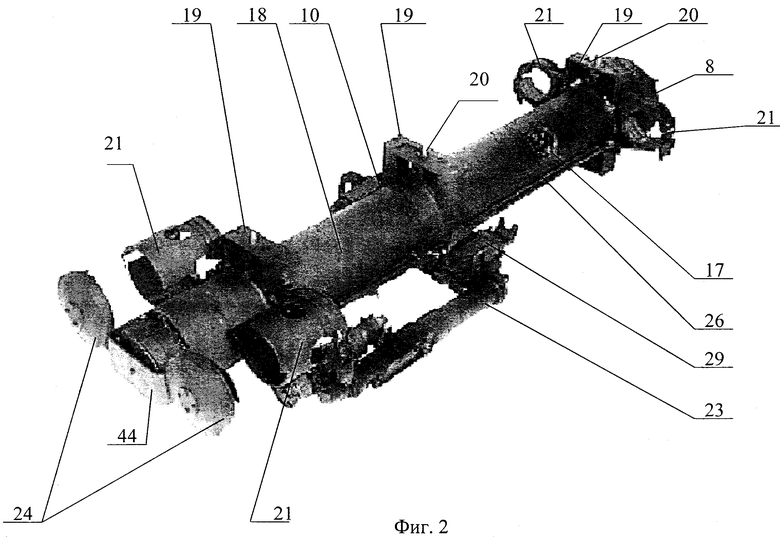
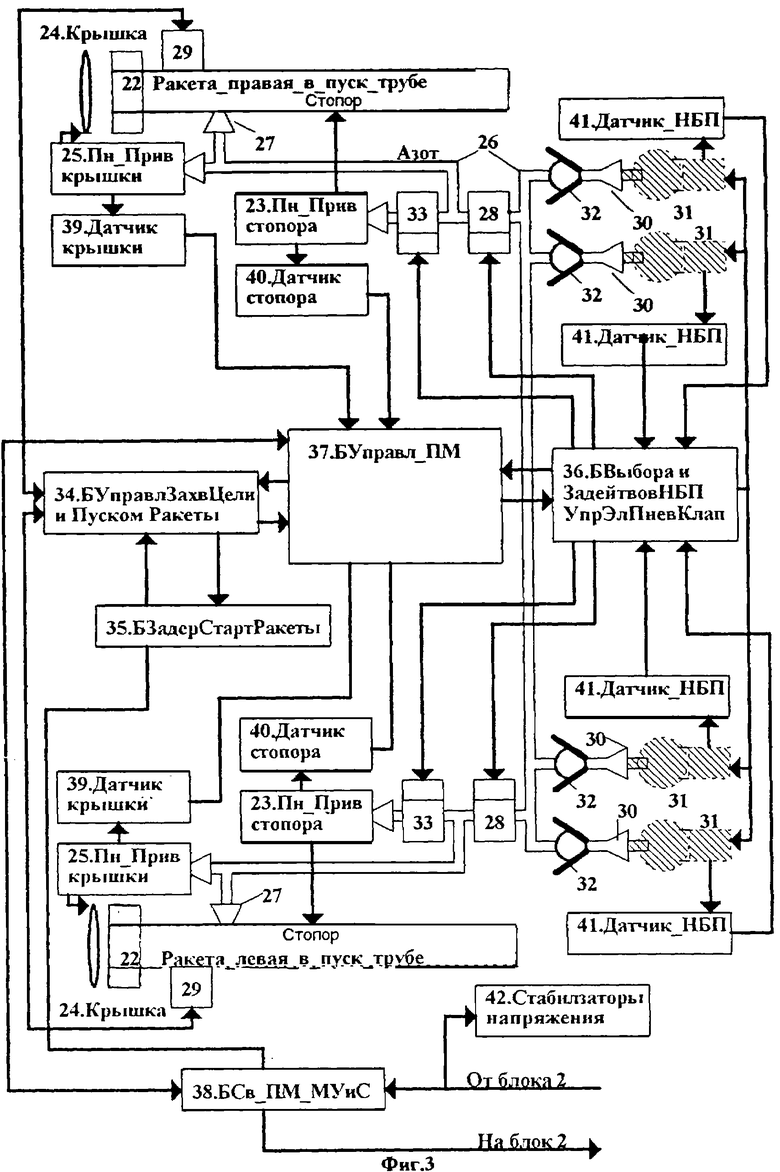
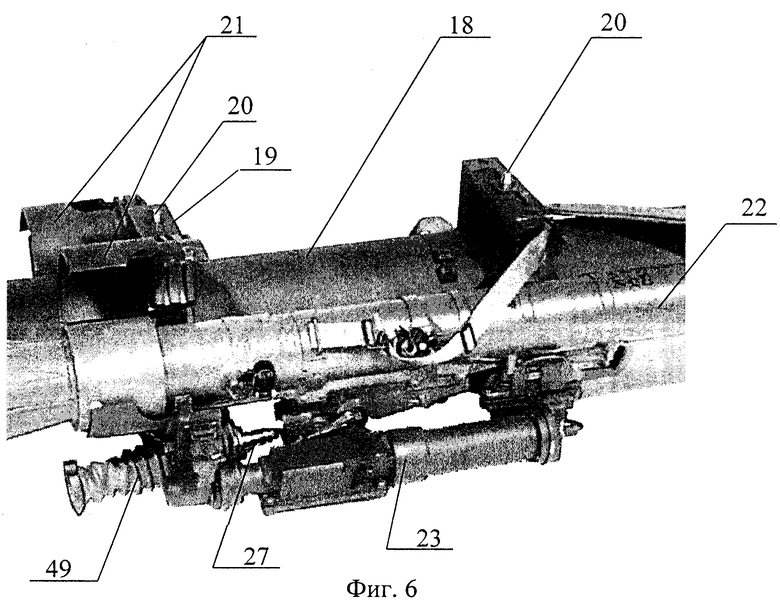
Связь МУиС с ПДУ и ПМ осуществляется электрическими кабелями (не показаны). ПМ имеет разъем 17 (фиг.2) для подсоединения кабеля от МУиС. Пусковой модуль имеет полую силовую балку 18 с несущими опорами 19, центрирующими элементами 20 для установки на носителе и с хомутами 21 для быстрого закрепления по сторонам балки ракет в пусковых трубах 22, фиг.3, 6 (не входят в состав ПМ), из состава ПЗРК. ПМ снабжен механизмами расстопорения ракет 23 (Пн Прив стопора), защитными передними крышками 24 с механизмами их открывания в виде пневмоприводов 25 (Пн Прив крышки), при этом каждый ПМ имеет газовую магистраль 26 подачи через подводящий штуцер 27 сжатого газа к оптической головке самонаведения (ОГС) ракеты от электропневмоклапанов (ЭПК) 28 и снабжен средствами электрического подключения 29 пусковых труб с ракетами к ПМ. В герметизированной полости силовой балки 18 размещена электроника управления ПМ. Несущие опоры 19 имеют элементы крепления и центрирования 20 и сверху, и снизу, позволяющие крепить ПМ как на носителе, так и между собой (друг над другом), в виде "этажерки" и(или) "грозди". Хомуты 21 для быстрого закрепления по стопорам балки 18 пусковых труб 22 с ракетами размещены на передней и задней несущих опорах 19. Механизмы 25 открывания передних защитных крышек 24 закреплены на переднем торце силовой балки 18. ПМ снабжены приемными устройством 30 (фиг.4) для подключения штатных НБП 31 (фиг.3, показаны условно). Приемное устройство 30 размещено на заднем торце силовой балки 18. ПМ содержит обратные клапаны 32, присоединенные к приемным устройствам 30 и ЭПК 28 выбора ракеты. К ЭПК 28 выбора ракеты подсоединены штуцер 27 подачи охлаждающего газа на ОГС ракеты, пневмопривод 25 открывания защитных крышек 24 и ЭПК 33 подключения пневмопривода 23 механизма расстопорения ракеты. Электроника управления ПМ содержит блок управления 34 (БУправлЗахвЦели и Пуском Ракеты) захватом цели и пуском ракеты, блок 35 (БЗадерСтартРакеты) задержки старта ракеты, блок 36 (БВыбора и ЗадействовНБП УпрЭлПневКлап) выбора и задействования НБП и управления ЭПК, блок 37 (БУправл ПМ) управления ПМ, связанный через блок 38 (БСв ПМ МУиС) связи ПМ МУиС двухсторонней связью с МУиС 2 и двухсторонней связью с блоком 34 управления захватом цели и пуском ракеты, блоком 36 выбора и задействования НБП и управления ЭПК. Пусковой модуль снабжен датчиками положения 39 защитных крышек и датчиками положения стопоров 40. Блок 36 выбора и задействования НБП и управления ЭПК соединен с ЭПК 28 выбора ракеты и ЭПК 33 подсоединения пневмоприводов расстопорения ракет для управления их задействованием и включением. Для определения наличия НБП в ПМ введены датчики 41 наличия незадействованных НБП. Блок 35 задержки старта ракеты соединен с блоком управления захватом цели и пуском ракеты 34 и через блок связи 38 с МУиС.
Блок управления захватом цели и пуском ракеты 34 связан со средствами подключения 29 ракет в пусковых трубах к ПМ и имеет средство для определения наличия ракеты на ПМ, например, в виде замкнутой цепи через ракету, которая размыкается при сходе ракеты с ПМ. ПМ имеет блок 42 питания, содержащий стабилизаторы напряжения, вход которого соединен с МУиС 2. Блок 38 связи ПМ с МУиС содержит средства для осуществления двусторонней связи с использованием протокола RS-422, которая выполнена с использованием стандартных микросхем.
Блоки 34, 35, 37, 38 выполнены на микроконтроллерах типа 1830ВЕ51.
В реализуемом варианте четыре приемных устройства 30, представленные на фиг. 4, конструктивно выполнены в едином блоке, закрепленном на заднем торце силовой балки 18. Каждое приемное устройство снабжено пружинным ударным механизмом взведения 43 и электромагнитным спусковым механизмом (не показан). Каждое приемное устройство выполнено в виде гнезда, к которому присоединена газовая магистраль и электроразъем для подключения цепей питания и управления НБП. Кроме того, гнездо оснащено фиксатором для закрепления штуцера НБП от выпадения. Предусмотрено подключение к газовой магистрали одного баллона большей емкости для многоразового запуска ракет. Установленные в ПМ датчики 39 защитных передних крышек и датчики 40 механизмов расстопорения ракет механически связаны с пневмоприводами соответствующих узлов, при этом элементы комплектации датчиков последовательно подключают запальную цель стартового двигателя соответствующей ракеты и выдают информацию об их положении в блок 37 управления ПМ.
На переднем торце ПМ (см. фиг.2) устанавливается подковообразная предохранительная чека 44, блокирующая несанкционированное открывание защитных передних крышек и, следовательно, блокирующая подключение стартового двигателя ракеты. Чека снимается при боевой работе после снаряжения ПМ пусковыми трубами с ракетами.
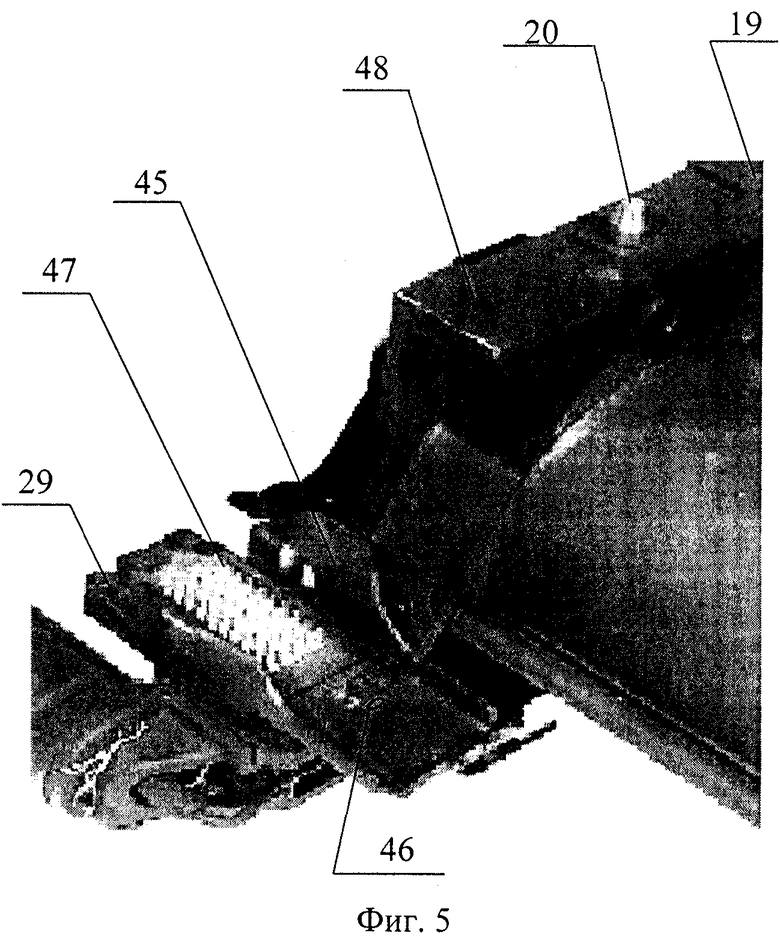
На средней несущей опоре 19 ПМ справа и слева размещены средства для подключения пусковых труб ПЗРК к ПМ 29 (см. фиг.5). Каждое устройство выполнено в виде направляющего коробчатого кожуха 45 с центрирующим отверстием 46 и электроразъемом 47. Коробчатый кожух снабжен пружинными элементами. Электрический разъем обеспечивает электрическую связь электроники управления через пусковую трубу с ракетой. Коробчатый кожух обеспечивает при снаряжении ПМ две функции - направляющего элемента для посадочного места пусковой трубы ПЗРК и защитного элемента для контактов электроразъема. Каждая несущая опора 19 снабжена центрирующими элементами 20 (сверху штырь, снизу отверстие) и отверстиями 48 для соединения с носителем или с другим ПМ.
При установке пусковой трубы с ракетой ее штырь западает в центрирующее отверстие коробчатого кожуха, чем обеспечивается сочленение элементов электроразъема и подсоединение электрических цепей ракеты к электронике управления.
На передней опоре 19 справа и слева размещены газоподводящие штуцеры 27 (см. фиг.6), снабженные пружинными механизмами фиксации 49.
Блок 34 управления захватом цели и пуском ракеты заимствован из ПЗРК "Игла" (Переносной зенитный ракетный комплекс "Игла" (9К38), (Москва, Военное издательство, 1987 г., стр.50)) и предназначен для подготовки ракеты к пуску, проведения захвата цели и подачи напряжения на пусковые цепи ракеты. Этот блок осуществляет раскрутку ротора гироскопа гирокоординатора ОГС, автоматическое арретирование и разарретирование, обработку и оценку сигналов, поступающих с ракеты при захвате цели ракетой. При залповой стрельбе информация о процессе захвата через блоки 37 и 38 поступает в МУиС 2, который через блок 13 формирования залпа осуществляет, во-первых, задержку начала программы запуска ракеты, а во-вторых, после начала запуска синхронизирует процессы запуска для одновременного схода ракет разных ПМ при залповой стрельбе. Через блок 36 выбора и задействования НБП и управления ЭПК блок 37 управляет ЭПК привода стопора ракеты и подключает при этом цепи стартового двигателя к блоку 34 управления захватом цели и пуском ракеты. От МУиС 2 через блок 38 поступают команды разрешения пуска и блокировки пуска.
Работа системы для автоматизированного запуска с носителя ракет ПЗРК включает следующие этапы:
- установка системы на носителе;
- снаряжение системы ракетами в пусковых трубах от ПЗРК и снаряжение ПМ НБП от ПЗРК;
- включение системы (режим ожидания);
- боевая работа.
В основном, в качестве ПДУ 3 используются средства управления индикации, уже имеющиеся на носителе. К ПДУ через кабель подсоединяют МУиС 2, а к нему закрепленные на носителе ПМ. ПМ крепятся к носителю своими элементами крепления 48, имеющимися на опорах, при этом точная пространственная фиксация обеспечивается центрирующими элементами опор 20. Электрическая связь каждого ПМ и МУиС осуществляется через разъем 17 ПМ.
Для снаряжения ПМ ракету в трубе из состава ПЗРК типа "Игла" укладывают, находясь сбоку, что исключает опасность для снаряжающего. Трубу с ракетой укладывают на нижние части хомутов на передней и задней опорах, обеспечивая "западание" штыря пусковой трубы в центрирующее отверстие 46 направляющего кожуха 45. Опускают последовательно хомуты на передней и задней опор и застегивают замки, вводят подводящий штуцер 27 в отверстие пусковой трубы ракеты и фиксируют его при помощи пружинного механизма 49 с байонетным соединением. Для снаряжения ПМ НБП штуцер НБП вводят в гнездо приемного устройства 30, после чего взводят ударный механизм 43 взведения НБП. В комплект поставки ПЗРК, в одной упаковке, входят две ракеты в пусковых трубах и четыре НБП. Отдельно могут поставляться НБП для многоразового использования.
Передние защитные крышки 24 ПМ закрывают передний торец трубы ракеты, обеспечивая ее пылебрызгозащищенность при транспортировке на носителе. Подковообразная чека 44 предотвращает открывание защитных передних крышек и, следовательно, предотвращает коммутацию цепей стартового двигателя, обеспечивая безопасность проведения всех работ по снаряжению - расснаряжению. Чека снимается после проведения снаряжения. Расснаряжение ПМ осуществляется в обратном порядке.
Включение системы производится перед боевой работой или с началом боевой работы, поэтому не будем выделять отдельно этап включения системы, рассматривая его как подэтап боевой работы.
При начале боевой работы (дежурства) с ПДУ 3 от источника питания 4 поступает питание на МУиС 2 и после фильтрации в блоке 15 подается на другие блоки МУиС 2 и ПМ. Через вторичные источники питания ПМ 42 происходит подача питания на блоки ПМ. Блок 12 МУиС через блок 11 связи МУиС с ПМ последовательно, периодически опрашивает ПМ по асинхронной линии связи. В это время блок 37 ПМ собирает информацию о имеющихся ресурсов ПМ и их состоянии ПМ, используя состояние датчиков 39, 40, 41 и сигналов с блока 34. По получению запроса по линии связи эта информация передается с блока 37 через блок 38 на МУиС 2. Это сообщение, например, содержит сведения о наличии ракет и пусковых труб на каждом месте ПМ, количестве неиспользованных НБП, положении защитных крышек и стопоров.
На основе полученной информации блок 12 выбора ПМ и управления ПМ выдает команду в блок 14 запроса НБП. Блок запроса НБП выдает сообщение на ПДУ 3 о готовности системы начать боевую работу и проверяет соответствие ответа с ПДУ установленным нормам, например, что это разовая ответная команда, которая должна прийти после запроса и иметь заданную длительность. Это необходимо для повышения надежности и исключения выполнения команды на запуск НБП от помех. Запрос может отображаться на блоке 7 индикации на ПДУ и обрабатываться оператором кратковременным нажатием кнопки 5 разрешения запуска НИП. В автоматизированной системе управления носителя эта команда может формироваться и автоматически при вхождении цели в зону пуска и наличия разрешения командира. Команда с кнопки 6 разрешения пуска выдается после совмещения прицельной оси ПМ с направлением на выбранную цель после ее вхождения в зону пуска. По получению команды на запуск НБП от ПДУ блок 12 выбирает случайно ПМ из числа, имеющих ресурс на работу, и выдает команду на выбранные ПМ начать работу. ПМ, получив команду в блок 37 управления ПМ от блока связи 38, выдает команду в блок 36 выбора и задействования НБП и управления ЭПК. Блок 36 выбирает по случайному закону ракету и НБП из имеющихся на ПМ и проводит задействование выбранного НБП и подключение к нему блока 34 управления захватом цели и пуском ракеты, а также выбранной для работы ракеты, одновременно подключая соответствующий ЭПК 28 выбора ракеты. Подача электропитания на электромагнит спускового механизма приемного устройства 30 НБП вызывает срабатывание ударного спускового механизма, который производит вскрытие НБП, при этом НБП вырабатывает газ высокого давления и электропитание, поступающие на борт ракеты. Через ЭПК 28 газ высокого давления поступает в пневмопривод 25 передней защитной крышки 24, которая при этом открывается и удерживается в таком положении в течении всего времени боевой работы. Через подводящий штуцер 27 в ракету поступает газ высокого давления для охлаждения ОГС. Блок 37 управления ПМ контролирует выход на режим НБП по напряжению и по срабатыванию датчика 39 передней защитной крышки по давлению газа и при отсутствии одного из этих событий может дать команду на выбор для работы другого НБП.
Блок 34 управления захватом цели и пуском ракеты осуществляет раскрутку ротора гироскопа координатора ОГС, обработку и оценку сигналов, поступающих с ракеты при захвате цели от ОГС, и при наличии команды разрешение пуска с кнопки 6 или заменяющей ее команды из блока 9 ПДУ, производит автоматическое разарретирование гирокоординатора ОГС и выдает в блок 37 управления ПМ сообщение о готовности данной ракеты к началу включения программы запуска (взведение бортового источника питания ракеты в полетном режиме, взведение боевой части, снятию ракеты со стопора, подаче питания на стартовый двигатель ракеты).
Это сообщение поступает от каждого работающего ПМ на МУиС через блоки 37, 38, 11. Блок 13 формирования залпа с учетом команд управления с ПДУ (через блок 12), времени, прошедшего от начала захвата цели первой ракетой, и, например, параметров цели, поступающей с блока 9 ПДУ через блок 12, задерживает начало программы запуска ракеты (через блок 35 задержки старта ракеты ПМ) первой захватившей цель до захвата цели второй ракетой или окончания заданного времени ожидания. Для одновременности старта ракет это необходимо, например, для исключения перекрытия дымом двигателя одной ракеты линии визирования на цель другой ракеты, команда на снятие задержки старта поступает одновременно на все ракеты. Блок 35 задержки старта ракеты снимает задержку, если ракета готова к началу старта, и запрещает старт ракеты в этом цикле работы, если на момент времени получения разрешения от блока 13 МУиС ракета не готова к старту. Старт этой ракеты будет возможен только после отпускания кнопки 6 ПДУ и вторичного ее нажатия и повторения цикла захвата цели ОГС.
Для повышения безопасности запальная цепь стартового двигателя подсоединяется к блоку 34 управления захватом цели и пуском ракеты только после открывания защитных крышек и снятия ракеты со стопора за счет введения в датчики 39 и 40 соответствующих цепей коммутации. После старта ракеты блок 36 управления ЭПК удерживает клапан ЭПК 33 пневмопривода механизма расстопорения ракеты некоторое время открытым для того, чтобы газ, оставшийся в пневмоприводе, истек в атмосферу через срезанную при старте ракеты трубку (является принадлежностью пусковой трубы). Электропитание с ЭПК 28 выбора ракеты снимается сразу после старта ракеты, при этом закрывается газовый тракт и оставшийся в НБП газ высокого давления может использоваться как дополнительный источник при запуске второй ракеты. Защитные передние крышки и рычаги пневмоприводов механизмов расстопорения возвращаются в исходное положение под действием имеющихся в их составе возвратных пружин.
Блок 16 анализа угловой скорости получает с ПМ величину угловой скорости линии визирования, измеряемую ОГС. Как известно, эта операция относится к основным функциям ОГС на ракетах с самонаведением на цель, к которым относятся ракеты ПЗРК типа "Игла". Величину угловой скорости цели обычно измеряют и средства носителя. Блок 16 сравнивает эти угловые скорости между собой и выдает в блок 12 сообщение о пусковых модулях, на которых угловые скорости превышают заданный порог. Блок 12 выбора ПМ и управления выдает через блок 11 на конкретный модуль команду повторить цикл захвата цели. Эта команда поступает по асинхронной линии связи на блок 38 связи ПМ с МУиС и на блок 37 управления ПМ. Последний дает команду блоку 34 управления захватом цели и пуском ракеты повторить цикл захвата. Блок 34 арретирует гирокоординатор ОГС. При этом оптическая ось координатора совмещается с прицельной линией ПМ. После этого повторяется захват цели системой.
Как следует из рассмотрения работы системы, она снабжена всеми средствами для установки на носителе и стрельбы ракетами ПЗРК от комплекса "Игла". При этом для запуска ракет достаточно подать питание на систему, совместить прицельную линию ПМ с направлением на цель, находящуюся в зоне пуска, удерживать это направление и выдать команды, разрешающие запуск НБП и пуск ракеты. Остальные предпусковые и пусковые операции система для автоматизированного запуска ракет выполнит автоматически.
Предлагаемое техническое решение легло в основу разработки и изготовления нескольких образцов системы для автоматизированного запуска ракет ПЗРК "Игла". В настоящее время с одного из макетных образцов проведены успешные пуски ракет комплекса "Игла" по цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯЖАНИЯ ПУСКОВОЙ УСТАНОВКИ РАКЕТОЙ В ПУСКОВОЙ ТРУБЕ ИЗ СОСТАВА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА ТИПА "ИГЛА" | 2002 |
|
RU2202755C1 |
| КОРАБЕЛЬНЫЙ КОНТЕЙНЕР ДЛЯ ХРАНЕНИЯ И ПУСКА РАКЕТЫ | 1999 |
|
RU2156941C1 |
| КОРАБЕЛЬНЫЙ КОНТЕЙНЕР ДЛЯ ХРАНЕНИЯ И ПУСКА РАКЕТЫ | 2000 |
|
RU2194235C2 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1996 |
|
RU2111445C1 |
| РАКЕТНАЯ ПУСКОВАЯ УСТАНОВКА | 2002 |
|
RU2219469C1 |
| СПОСОБ СТАРТА УПРАВЛЯЕМОЙ РАКЕТЫ ИЗ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240489C1 |
| РАКЕТНО-ТОРПЕДНАЯ ПУСКОВАЯ УСТАНОВКА | 2000 |
|
RU2170904C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |

Изобретение относится к пусковым установкам наземного, воздушного или надводного базирования и может быть использовано в переносных зенитных ракетных комплексах типа "Игла". Реализация системы позволяет осуществлять запуск ракет как в режиме залповой, так и одиночной стрельбы с различных типов носителей. Сущность изобретения заключается в том, что в систему введен электронный модуль управления и связи, подключенный к пульту дистанционного управления и электрически связанный с каждым пусковым модулем. Все пусковые модули снабжены приемными устройствами для подстыковки наземных блоков электрогазового питания. Механизмы расстопорения ракет и открывания защитных крышек выполнены в виде пневмоприводов. Газовые магистрали присоединены через обратные клапаны к приемным устройствам. Каждый подводящий штуцер снабжен механизмом фиксации и соединен с газовой магистралью через электропневмоклапан выбора ракеты, к выходу которого подсоединены пневмопривод открывания защитной крышки и через дополнительный электропневмоклапан - пневмопривод расстопорения этой ракеты. 8 з.п.ф-лы, 7 ил.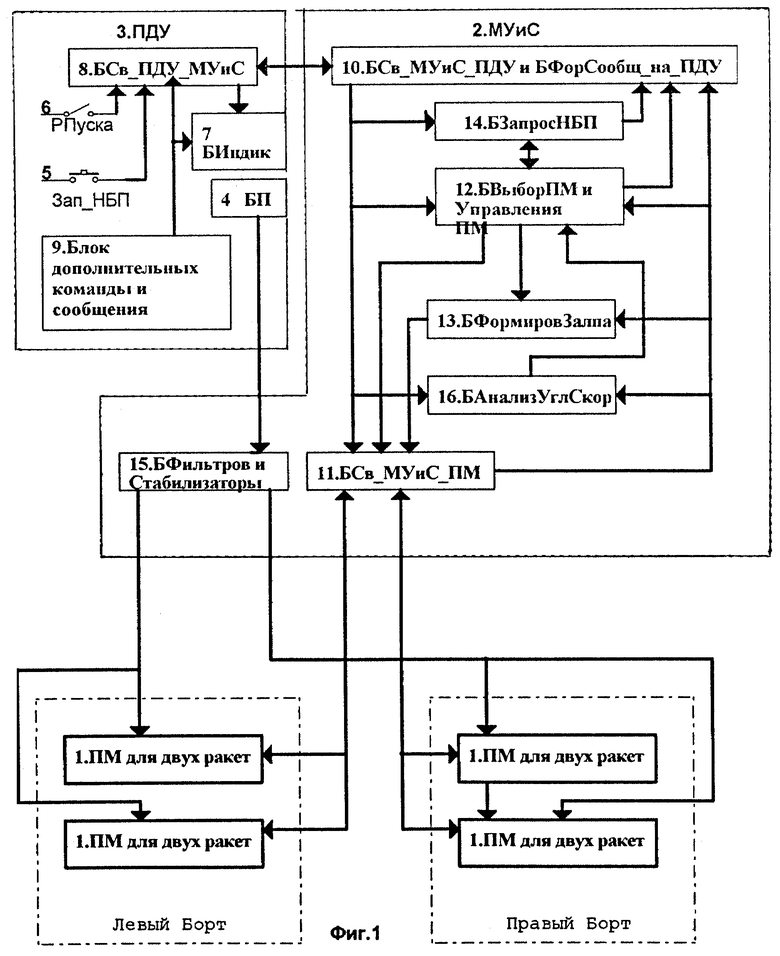
| US 4429611, 07.02.1984 | |||
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| РЕАКТИВНАЯ СИСТЕМА ЗАЛПОВОГО ОГНЯ | 1999 |
|
RU2168691C1 |
| GB 1294006, 25.10.1972 | |||
| US 6012375 А, 11.01.2000 | |||
| СВЧ ПЕРЕКЛЮЧАТЕЛЬ ПРИЕМ-ПЕРЕДАЧА | 2011 |
|
RU2461919C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НИЖНЕЙ ГРАНИЦЫ ЗАЛЕГАНИЯ МНОГОЛЕТНЕМЕРЗЛЫХ ПОРОД | 1998 |
|
RU2125149C1 |

