Изобретение относится к ракетной технике, а именно к системам старта, преимущественно - морских противокорабельных и зенитных управляемых ракет.
В наиболее общем виде система старта ракет включает:
- направляющий аппарат (пусковая установка, контейнер, капсула);
- исполнительные устройства (двигатели, газогенераторы, газодинамические и аэродинамические органы управления);
- управляющие средства (датчики положения и параметров движения ракеты, бортовые вычислительные средства, электрооборудование и пр.).
Объектом данного изобретения является как особенности исполнительных устройств системы старта, так и порядок их работы (способ применения), задаваемый управляющими средствами. Причем первичным представляется именно способ применения, так как одно и то же устройство системы старта за счет изменения порядка и приемов работы его компонентов (как это будет показано ниже) позволяет добиться нового эффекта.
Для современных противокорабельных крылатых ракет (ПКР) и зенитных управляемых ракет (ЗУР) морского базирования большое значение придается возможности осуществления старта в широком диапазоне условий: при различных углах наклона пусковых установок (ПУ), с поверхности и из-под воды (последнее актуально для ПКР). Это обусловлено широкой номенклатурой возможных носителей оружия данного типа: от катеров и малых ракетных кораблей - до крейсеров и подводных лодок, существенно отличающихся друг от друга по архитектуре, габаритам и зонам размещения ракет (см., например, фиг.1-3).
Для адаптации ракет к различным типам носителей, удобства эксплуатации и ограждения конструкции от внешних неблагоприятных воздействий применяют транспортно-пусковые контейнеры (ТПК) различной конструкции. В частности, известны ТПК и система старта, предназначенные для пуска крылатой ракеты “Томагавк” из вертикальных ПУ подводных лодок (“ПУ вертикального запуска КР “Томагавк” на АЛЛ “Лос-Анджелес”, “Судостроение за рубежом”, №7, 1986, с.48-51). Упомянутая система старта включает исполнительные устройства: пороховой аккумулятор давления (ПАД), установленный в донной части ТПК, обтюрирующие элементы и разгонную двигательную установку (РДУ) ракеты, а также - систему управления пуском и электрооборудование, в том числе - датчики, фиксирующие выход ракеты из контейнера и воды. Способ старта крылатой ракеты “Томагавк”, реализуемый данной системой, предусматривает ее выстреливание по “минометной схеме” (путем создания избыточного давления в задонном объеме ТПК) и выход ракеты в “свободную воду”, где запускается РДУ. Под действием тяги РДУ ракета движется под водой и разгоняется на воздушном участке траектории, при этом стабилизация ее углового движения и выполнение программных разворотов обеспечивается за счет управления вектором тяги РДУ, а также аэродинамическими рулями.
Необходимо отметить, что данная система старта не является универсальной, так как предназначена только для реализации вертикального старта с погруженных подводных лодок (ПЛ). Например, с надводных кораблей (НК) “Томагавк” стартует по “проточной схеме” с запуском РДУ непосредственно в ПУ (см. Родионов Б.И., Новичков Н.Н. Крылатые ракеты в морском бою. - Воениздат, 1987, с.18). Учитывая относительно невысокую тяговооруженность стартового двигателя (РДУ “Томагавка” спроектирована под условия подводного старта), запуск ракеты из ПУ надводного корабля по “минометной схеме” с последующим включением РДУ в процессе движения вне пусковой установки очевидно привел бы к большим величинам послестартовой “просадки”, что при вертикальном старте чревато повреждением надпалубных конструкций стреляющего НК, а при старте под малым углом к горизонту - возможностью падения запущенной ракеты в воду.
Другим немаловажным качеством современных ПКР и ЗУР является способность совершать быстрые развороты в направлении цели, что определяет такие их принципиальные свойства, как время реакции и минимальная дальность стрельбы. Применяемые на крылатой ракете “Томагавк” органы управления не могут рассматриваться в качестве эффективных средств осуществления быстрых послестартовых разворотов: поворотное сопло РДУ не позволяет создавать управляющие моменты требуемой величины в силу упоминавшегося выше невысокого уровня тяги, в то время как аэродинамические рули становятся эффективными лишь с момента набора ракетой скорости не менее 100 м/с. Применительно к ПКР и ЗУР это означает ограничение тактических возможностей в части стрельбы на минимальную дальность и по внезапно обнаруженной скоростной цели.
Возможность выполнения быстрых разворотов ракеты в направлении цели может быть обеспечена применением специальных устройств, таких как, например, описанное в “Development of an orientation control system for the advanced kinetic energy missile”, Roger P. Berry, Aerospase Engineer US Army Missile Command Redstone Arsenal, Alabama, NY, 1992. 5p (AIAA paper/American institute of Aeronautics and Astronautics; 92-2763). Известное устройство, предназначенное для непосредственного управления ориентацией ракеты, размещено в ее хвостовой части и выполнено на основе газогенератора и соединенных с ним реактивных сопел. Способ применения данного устройства предусматривает сброс пассивной массы отработавших средств управления ориентацией (СУО) непосредственно перед запуском разгонной двигательной установки. Однако это создает сложности с точки зрения обеспечения безопасного применения оружия, так как требует принятия соответствующих мер по недопущению падения отделяемых элементов на носитель (стартовую площадку).
Наиболее близким по технической сущности к предлагаемому изобретению является исполнительная система старта и ориентации ракеты по патенту РФ №2082946 от 27.06.97 (МКИ: F 42 В 15/01, 10/66, В 64 С 15/00), точнее, один из вариантов ее конкретного исполнения. В состав известной исполнительной системы входят: пусковой контейнер, пороховой аккумулятор давления, разгонная двигательная установка и средства управления ориентации ракеты. Средства управления ориентацией ракеты, в наиболее близком к предлагаемому изобретению варианте исполнения, представляют собой набор импульсных твердотопливных реактивных двигателей, жестко смонтированных на кольцевом корпусе, установленном на хвостовой части ракеты. Благодаря тому что внутренняя поверхность упомянутого корпуса, выполненная конусообразной и покрытой теплоизоляционным материалом, образует газоход с проточным профилем, являющимся продолжением сопла РДУ, последняя может беспрепятственно запускаться и работать даже при неотделенном корпусе. Способ применения известной исполнительной системы включает создание ПАД-ом избыточного давления в задонном объеме ТПК, перемещение ракеты до среза ТПК с последующим ее движением в воздухе, ориентацию ракеты в направлении цели посредством импульсных реактивных двигателей управления ориентацией по крену, тангажу и курсу и запуск РДУ. После удаления ракеты на безопасное расстояние от носителя пассивная масса СУО для снижения энергозатрат на дальнейший разгон может быть сброшена.
Исполнительная система по патенту №2082946 обеспечивает достижение поставленной цели, а именно возможность трансформации ранее созданных и даже изготовленных ракет с наклонным стартом в перспективную ракету круговой обороны. Однако она не может быть признана полностью универсальной, так как предполагает сменную комплектацию ракет, реализующих тот или иной тип старта, что удорожает их серийное производство и усложняет условия эксплуатации на технической позиции и носителях.
Задачей предлагаемого изобретения является создание универсальной системы старта и приемов ее применения, обеспечивающих возможность осуществления надежного и безопасного запуска ракеты из ТПК в широком диапазоне условий, характерных для большинства типов морских носителей.
Технический результат выражается в обеспечении возможности осуществления посредством усовершенствования конструкции исполнительного устройства системы старта, запуска ракет из-под воды и с ее поверхности, в том числе и под разными углами.
Указанная задача достигается тем, что в устройстве для осуществления старта управляемой ракеты из транспортно-пускового контейнера, содержащем разгонную двигательную установку ракеты и средства управления ориентацией, выполненные в виде импульсных твердотопливных реактивных двигателей, смонтированных на отделяемом от ракеты корпусе, согласно заявленному изобретению разгонная двигательная установка выполнена состоящей из двух параллельно установленных ракетных двигателей большой и малой тяги, а корпус средств управления ориентацией установлен на носовой части ракеты и снабжен импульсными твердотопливными реактивными двигателями увода.
Указанная задача также достигается тем, что в способе старта управляемой ракеты из транспортно-пускового контейнера, включающем создание избыточного давления в донном объеме контейнера, движение ракеты в контейнере и за его пределами, ориентацию ракеты в направлении цели, отделение пассивной массы средств управления ориентацией и запуск разгонной двигательной установки, согласно заявленному изобретению осуществляют надводный старт путем запуска разгонной двигательной установки в режиме малой тяги в процессе перемещения ракеты в контейнере, задействуют средства управления ориентации по заданному времени от начала движения ракеты. Для отделения пассивной массы средств управления ориентацией ей сообщают импульс по направлению движения ракеты. После чего включают режим большой тяги разгонной двигательной установки. В случае старта под малым углом к горизонту ориентацию ракеты осуществляют путем курсового разворота контейнера в направлении цели. Отделение пассивной массы средств управления ориентацией производят в процессе перемещения ракеты в контейнере или осуществляют подводный старт путем запуска разгонной двигательной установки при прохождении ракетой среза контейнера, а средства управления ориентацией задействуют после выхода ракеты из-под воды.
Выбор последовательности и условий выполнения операций по срабатыванию предложенного устройства обусловлен следующим.
Применение двухрежимной РДУ, и, в частности, ее конкретного исполнения в виде параллельно установленных двигателей малой и большой тяги, обусловлено следующим:
- рациональным использованием энергетического потенциала РДУ и ограничения нагружения ракеты при движении под водой, что обеспечивается при работе двигателя малой тяги,
- обеспечением потребной для условий надводного старта высокой стартовой тяговооруженности ракеты, реализуемой при работе двигателя большой тяги или совместной работе обоих двигателей.
Запуск РДУ в процессе перемещения ракеты в ТПК, в случае осуществления надводного старта, преследует цель: дополнительное увеличение скорости ее выхода из ТПК, что позволит:
- во-первых, ограничить величины возмущений углового движения стартовавшей ракеты от качки носителя;
- во-вторых, сократить время, необходимое для ухода ракеты на расстояние безопасного (для носителя) выполнения маневров ориентации (особенно критично при вертикальном старте с ПК),
- в-третьих, будет способствовать интенсивному разгону ракеты при малых углах старта во избежание послестартовой “просадки”.
В то же время РДУ, даже в режиме малой тяги, не может быть запущена до начала движения ракеты в контейнере, так как это чревато резким возрастанием давления в ограниченном задонном объеме ТПК.
“Задержка” момента запуска РДУ при осуществлении подводного старта ракеты до прохождения последней среза ТПК связана с иной совокупностью и характером распределения сил, действующих на ракету при старте в воде и обусловлена:
- во-первых, отсутствием в рассматриваемом случае мотивации к увеличению ее скорости выхода из ТПК,
- во-вторых, стремлением избежать избыточного нагружения ракеты при “раскупорке” контейнера (момент выхода обтюратора ракеты за срез ТПК), так как вследствие практически полной несжимаемости воды повышенное давление воздействует как на донную часть, так и боковую поверхность ракеты.
Задействование средств управления ориентацией ракеты после выхода ее из-под воды при подводном старте или по заданному времени от начала движения - при надводном, так же как и последующий увод пассивной массы сработавших средств вперед по направлению полета, необходимо для обеспечения безопасности носителя во всем диапазоне условий старта.
Выбор момента включения режима большой тяги РДУ (после увода пассивной массы СУО) обусловлен стремлением ограничить величину потребного импульса увода, так как в противном случае многократно возрастают инерционные силы и скоростной напор, препятствующие их отделению.
Наконец, порядок операций по осуществлению надводного старта под малым углом к горизонту имеет ряд особенностей. Прежде всего необходимо отметить, что такой способ размещения характерен, в основном, для противокорабельного ракетного оружия кораблей малого водоизмещения класса “ракетный катер - корвет” (см. фиг.1). Тактика применения таких кораблей в большинстве ситуаций не требует от ПКР осуществления больших азимутальных разворотов (на угол больший ± 20-30°), так как за время предстартовой подготовки залпа сам корабль может легко занять наиболее выгодное положение для стрельбы с ориентацией ТПК с ПКР в направлении цели. Учитывая это, а также ранее упоминавшуюся критичность к интенсивности разгона ракет, стартовавших под малым углом к горизонту, предложено средства управления ориентацией не задействовать, а пассивную массу невостребованных СУО отделять в процессе перемещения ракеты в ТПК путем сообщения ей направленного импульса вслед за запуском РДУ в режиме малой тяги. Это позволит максимально ускорить включение режима большой тяги, обеспечив тем самым высокую тяговооруженность последующего разгона.
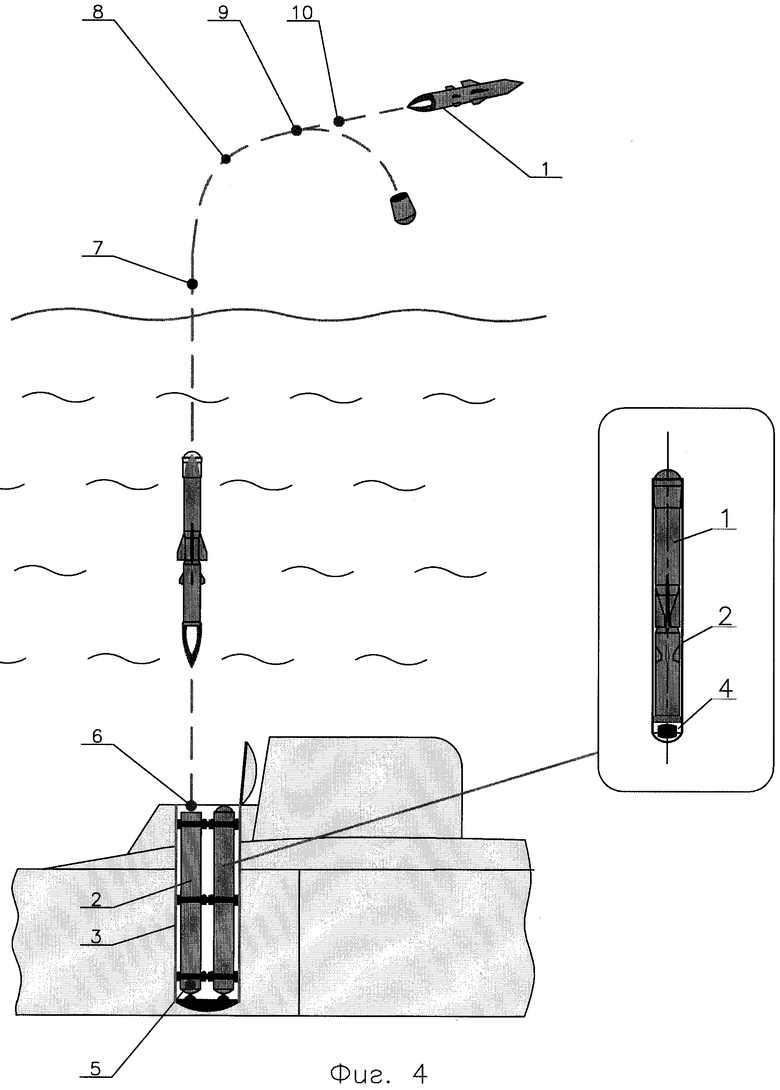
Сущность предлагаемого способа старта проиллюстрирована на фиг.4 и 5, где представлена укрупненная последовательность действий по его осуществлению. Более детально работа исполнительных средств из состава системы старта, в том числе ПАД, РДУ и СУО, будет приведена вслед за описанием устройства для осуществления предложенного способа.
На фиг.4 показан старт ракеты 1 из ТПК 2, установленного в вертикальную ПУ 3 подводной лодки.
На основании признака осуществляемого типа старта, например, “подводный”, выдаваемом на борт ракеты 1 в составе полетного задания, система управления реализует соответствующую последовательность заранее рассчитанных команд управления исполнительными устройствами старта.
В результате срабатывания ПАД создается избыточное давление 4 в задонном объеме ТПК 2 и ракета 1 под действием “поршневого эффекта” начинает движение 5 в контейнере. В момент прохождения хвостовой частью ракеты 1 среза ТПК 2, запускается РДУ в режиме малой тяги 6, под действием которой ракета 1 движется к поверхности воды.
По выходу ракеты 1 из воды задействуются СУО 7, которые по данным от системы управления обеспечивают выполнение пространственного маневра 8 ракеты в направлении, предусмотренном полетным заданием.
После срабатывания пассивной массе СУО сообщают импульс 9 в направлении движения ракеты 1 в текущий момент времени, в результате чего корпус СУО отделяется от носовой части ракеты 1 и уводится вперед и вниз по отношении к траектории ее дальнейшего полета.
Непосредственно вслед за фактом отделения корпуса СУО включают режим большой тяги 10 РДУ, ракета 1 резко ускоряется и продолжает полет по программной траектории.
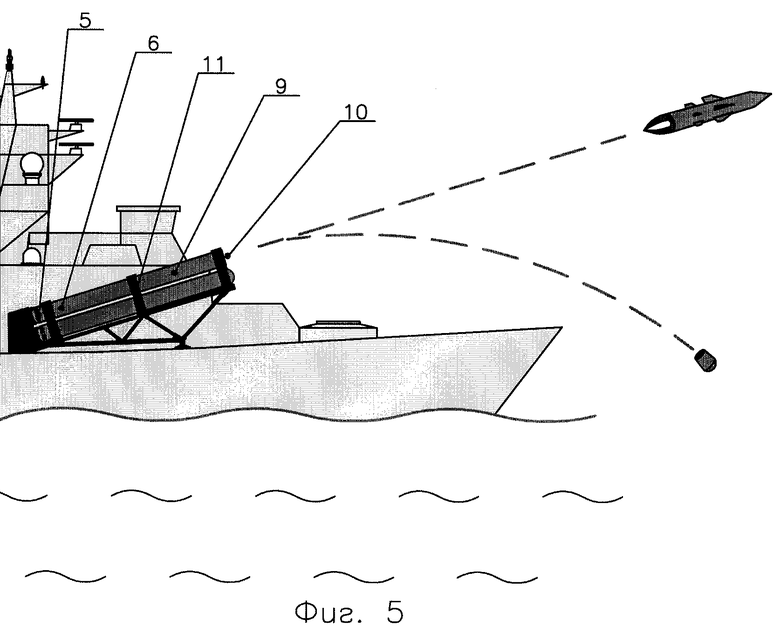
Последовательность действий по осуществлению старта ракеты 1 из ТПК 2, размещенного в пусковой установке 11 под малым (в пределах 10-30°) углом к палубе надводного корабля, характеризуется следующим (см. фиг.5).
В процессе предстартовой подготовки стрельбы ракетами 1, ТПК 2 ориентируют в направлении цели, например, путем соответствующего курсового разворота корабля с ТПК, жестко закрепленном на его корпусе (например, ПКР на корабле малого водоизмещения), или - разворота вращающейся пусковой установки с ТПК (например, ПУ корабельного зенитного ракетного комплекса).
После прохождения событий начальной фазы старта 4 и 5, полностью аналогичных приведенной выше схеме, бортовая система управления ракеты в соответствии с признаком “старт под малым углом” по прошествии заданного времени от начала движения 5 выдает последовательность команд на запуск РДУ в режиме малой тяги 6 и отделение пассивной массы СУО.
В результате ракета 1 увеличивает скорость движения в контейнере, а СУО, которые в данном случае не задействуются, сообщается импульс отделения 9 в направлении ориентации ТПК 2. Осуществление последнего события еще до момента полного выхода ракеты 1 из ТПК 2 делает возможным выдачу команды на запуск режима большой тяги РДУ 10 уже на срезе контейнера. В результате чего ракета 1 начинает интенсивный разгон сразу по выходу из ТПК 2 наклонной ПУ 11, исключая возможность возникновения опасных для носителя величин послестартовой “просадки” ракеты, в то время как отделившийся корпус СУО приводняется на гарантированно безопасном для носителя расстоянии.
Последовательность операций по осуществлению старта из наклонных (в пределах 30-45°) и вертикальных ПУ НК включает действие 4, 5 и 6 вышеописанного старта под малым углом к горизонту, но предусматривает работу СУО с целью выполнения необходимого в данном случае пространственного маневра 8. При реализации рассматриваемого типа старта задействование СУО 7 производят по команде, формируемой по заданному времени от начала движения 5 ракеты 1, которое заранее рассчитано, например, исходя из условия “неповреждения” надпалубных конструкций стреляющего корабля. Последующие за выполнением маневра 8 действия по отделению и уводу пассивной массы СУО 9 и включению режима большой тяги 10 РДУ полностью аналогичны варианту подводного старта (фиг.4).
Устройство для осуществления предложенного способа старта проиллюстрировано на фиг.6-11.
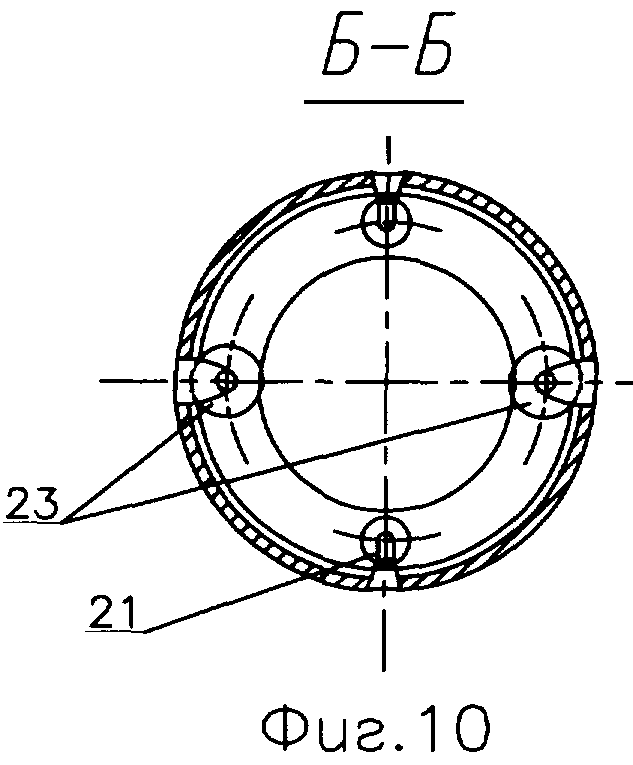
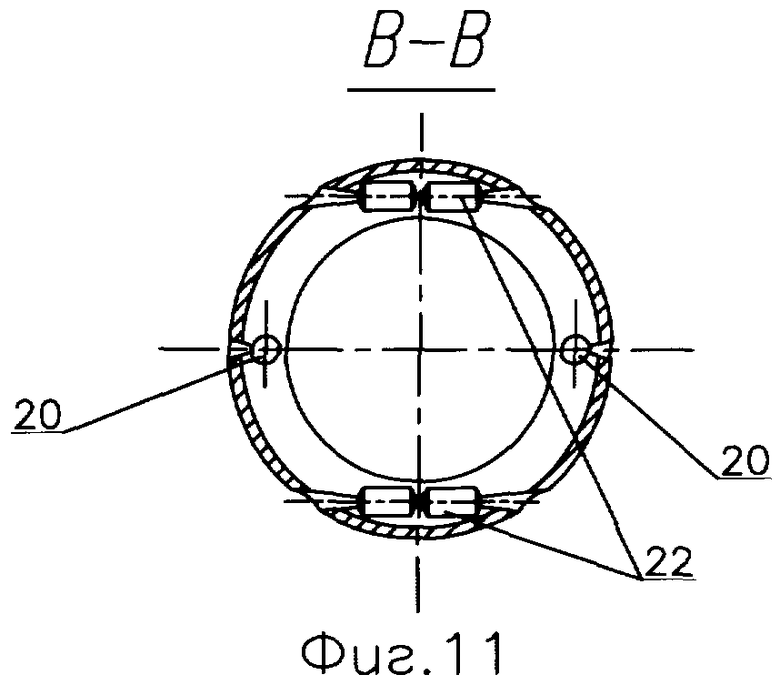
На фиг.6 показано размещение ракеты в ТПК. Хвостовая часть ракеты более детально представлена на фиг.7 (в частичном разрезе) и 8 (вид сзади), носовая часть ракеты с установленными на ней средствами управления ориентацией - соответственно на фиг.9 (в частичном разрезе), 10 и 11 (поперечные сечения).
Ракета 1 со сложенными крылом и оперением размещена в ТПК 2, выполненном в виде цилиндра с глухим задним днищем. В состав исполнительных устройств системы старта ракеты 1 входят ПАД 12, РДУ 13 и СУО 14, а также электрооборудование, в том числе - датчики выхода из воды и контейнера, концевые выключатели отделяемых элементов и пр.
ПАД 12 установлен в задонном объеме ТПК 2, ограниченном его задним днищем и хвостовой частью ракеты 1. РДУ 13, размещаемая, например, в полости маршевого прямоточного двигателя ракеты 1, выполнена в виде “параллельной связки” двух реактивных двигателей малой 15 и большой 16 тяги. На фиг.7 показано одно из возможных исполнений устройства такой РДУ в виде твердотопливного двигателя подводного хода с камерой сгорания тороцилиндрической формы, которая размещается вокруг сопла основного разгонного РДТТ. На корпусе РДУ 13 также смонтированы обтюратор 17, контактирующий с внутренней поверхностью ТПК 2, и донный электроразъем 18, служащий для связи бортовой системы управления ракеты 1 с корабельной системой управления оружием.
СУО 14 выполнены в виде совокупности импульсных РДТТ, жестко закрепленных на корпусе 19, установленном на носовой части ракеты 1 с возможностью отделения от последней. Упомянутые импульсные РДТТ функционально разделены, например, на двигатели разворота по курсу - пара двигателей 20, склонения по тангажу - пара двигателей 21 и четыре двигателя управления креном 22. Раструбы сопел двигателей 22 направлены по касательной к корпусу СУО 19, причем сопла двух двигателей развернуты в одну сторону, а двух других - в противоположную. На корпусе СУО 19 также установлена пара РДТТ 23 увода, раструбы сопел которых направлены под острым углом к продольной оси ракеты 1. Сам корпус оборудован средствами герметизации кольцевого зазора между ракетой 1 и ТПК 2 со стороны переднего торца последнего и срезными элементами продольного удержания ракеты в контейнере.
Непосредственно исполнительные устройства при осуществлении предложенного способа старта работают следующим образом.
Пороховые газы, образующиеся при срабатывании ПАД 12, создают в задонном объеме ТПК 2 избыточное давление, воздействующее на хвостовую часть ракеты 1. По достижении расчетной величины давления в задонном объеме происходит разрушение срезных элементов, удерживавших ракету 1 в исходном положении, и она начинает движение, скользя обтюратором 17 по направляющей цилиндрической поверхности ТПК 2. В результате расстыковывается донный электроразъем 18, что фиксируется бортовой системой управления ракеты 1, как факт начала движения 5 и может служить, например, точкой отсчета времени запуска РДУ 13 и задействования СУО 14 при осуществлении надводного старта.
Дальнейший порядок срабатывания устройств из состава системы старта, как это было отмечено выше, задается системой управления ракеты в соответствии с признаком реализуемого типа старта от системы управления оружием носителя.
Например, при осуществлении подводного старта (как наиболее “напряженного” из всех рассматриваемых), после прохождения хвостовой частью ракеты 1 среза ТПК 2, фиксируемого, например, соответствующим датчиком из состава электрооборудования, запускается РДТТ малой тяги 15, под действием которой ракета 1 движется в воде с умеренной и приблизительно постоянной скоростью. Раскрываются аэродинамические рули, обеспечивающие стабилизацию движения ракеты 1 на программной подводной траектории. По выходу ракеты 1 на поверхность, например, по факту срабатывания соответствующего датчика, задействуются СУО 14. Работу СУО 14 можно проиллюстрировать на примере выполнения маневра склонения ракеты 1 по тангажу:
- по команде от системы управления ракеты включается один из импульсных РДТТ 21, под действием тяги которого ракета набирает угловую скорость в канале тангажа,
- через промежуток времени, также рассчитанный бортовой системой управления исходя из заданного угла наклона траектории, включится второй двигатель 21, “гасящий” угловую скорость в момент приведения ракеты 1 в требуемое положение относительно горизонта.
Аналогичным образом ракета 1 может управляться в каналах рыскания и крена с учетом особенности последнего, где управление осуществляется посредством включения пар двигателей 22, создающих момент того или иного знака относительно продольной оси ракеты 1.
Работающий при выполнении пространственных маневров 8 РДТТ малой тяги 15, компенсируя силу тяжести ракеты 1, не допускает ее “просадки” относительно поверхности воды.
По завершении маневров ориентации ракеты корпусу СУО 19 посредством задействования РДТТ увода 23 сообщается импульс в направлении полета в текущий момент времени. Вслед за фактом отделения корпуса СУО 19 от носовой части ракеты 1 запускается РДТТ большой тяги 16 и начинается резкий разгон ракеты 1, во время которого движение ракеты стабилизируется, например, газодинамическими органами управления РДУ 13, а по набору достаточной скорости управление передается на аэродинамические рули.
Благодаря различной последовательности и признакам задействования исполнительных средств системы старта, предусмотренным предложенным выше способом, данное устройство придает ракете возможность стартовать с различных носителей с реализацией наиболее характерных для морского оружия типов старта (подводный, надводный, наклонный и вертикальный), а также - способность совершать быстрые послестартовые развороты.
Таким образом, можно констатировать, что изобретение позволяет создать полностью унифицированную ракету, отвечающую всем требованиям к современному морскому оружию общего назначения и адаптивную к самому широкому кругу носителей. Представляется, что корабельные комплексы противокорабельной и противовоздушной обороны, построенные на ее основе, имеют хорошие перспективы к широкому распространению во флотах государств, в том числе - обладающих многочисленными и разнородными ВМС, в составе которых наиболее полно “раскроются” преимущества унификации в части простоты и несопоставимо меньших затрат на эксплуатацию.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА С ПОДВОДНЫМ СТАРТОМ | 2007 |
|
RU2352894C1 |
| БЕРЕГОВОЙ КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ МНОГОРАЗОВЫЙ АВТОНОМНЫЙ | 2021 |
|
RU2768999C1 |
| КРЫЛАТАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2001 |
|
RU2215981C2 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
| МНОГОЦЕЛЕВАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ РАКЕТНАЯ СИСТЕМА | 2022 |
|
RU2791754C1 |
| СПОСОБ НАЗЕМНОГО ИЛИ НАДВОДНОГО СТАРТА РАКЕТЫ С СИСТЕМОЙ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2096721C1 |
| Стартовый блок ракеты | 2020 |
|
RU2752300C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
Изобретение относится к ракетной технике, а точнее к системам старта морских противокорабельных и зенитных управляемых ракет. Устройство содержит разгонную двигательную установку ракеты и средства управления ориентацией (далее - СУО). СУО выполнены в виде импульсных твердотопливных реактивных двигателей, смонтированных на отделяемом от ракеты корпусе. Разгонная двигательная установка выполнена состоящей из двух параллельно установленных ракетных двигателей большой и малой тяги. Корпус СУО установлен на носовой части ракеты и снабжен импульсными твердотопливными реактивными двигателями увода. Согласно способу старта осуществляют надводный старт путем запуска разгонной двигательной установки в режиме малой тяги в процессе перемещения ракеты в контейнере. Задействуют средства управления ориентации по заданному времени от начала движения ракеты. Для отделения пассивной массы средств управления ориентацией ей сообщают импульс по направлению движения ракеты, после чего включают режим большой тяги разгонной двигательной установки. В случае старта под малым углом к горизонту ориентацию ракеты осуществляют путем курсового разворота контейнера в направлении цели, а отделение пассивной массы средств управления ориентацией производят в процессе перемещения ракеты в контейнере. Подводный старт осуществляют путем запуска разгонной двигательной установки при прохождении ракетой среза контейнера. СУО задействуют после выхода ракеты из-под воды. Реализацией изобретений достигается возможность старта ракет с различных носителей. 2 с.п. ф-лы, 11 ил.
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА СТАРТА И ОРИЕНТАЦИИ РАКЕТЫ | 1995 |
|
RU2082946C1 |
| ПРОТИВОКОРАБЕЛЬНАЯ РАКЕТА | 2000 |
|
RU2186331C2 |
| US 4008869 А, 22.02.1977 | |||
| US 3286956 А, 22.11.1966. | |||

