Изобретение относится к военной технике, преимущественно к тактическим системам управляемого ракетного оружия (УРО) класса "поверхность - поверхность".
Известны комплексы УРО, обеспечивающие поражение целей управляемыми (самонаводящимися) ракетами и реактивными снарядами (PC), в т.ч. баллистическими класса "поверхность - поверхность" (см., например, Волков Е.Б., Мазинг Г. Ю. , Сокольский В.Н. Твердотопливные ракеты. - М.: Машиностроение, 1992, с. 275-280; Головин С.А., Сизов Ю.Г., Скоков А.Л., Хунданов Л.Л. Высокоточное оружие и борьба с ним. - М.: издательство "В.П.К.", 1996 - аналоги).
Известен способ высокоточного поражения цели вращающимся баллистическим PC со стабилизированным по крену головным отсеком (ГО), в котором размещена головка самонаведения (ГСН) - см. патент РФ 2158411 от 27.10.2000 (приоритет от 06.10.1999); функционирование PC по данному способу - ближайший аналог.
Однако способ - ближайший аналог не определяет особенностей функционирования управления PC в части их "количественной" привязки по характерной траектории полета.
Целью предлагаемого изобретения является уточнение особенностей функционирования управления баллистического PC, в т.ч. со стабилизированным по крену ГО.
Указанная цель достигается тем, что прием информации от ГСН начинают в момент времени t, определяемый ДО ЗАПУСКА PC по значению стартового угла θ между продольной осью PC и плоскостью горизонта, а также по табличным значениям начальной скорости PC, аэродинамического сопротивления PC и максимальной дальности работы ГСН по типовой цели. При этом угол наклона γ оси визирования антенного устройства (АУ) ГСН в точку прицеливания определяют ДО ЗАПУСКА PC по конфигурации баллистической траектории PC, параметрам вращения (либо стабилизации, например, для стабилизированных ГО ближайшего аналога) по крену и времени полета PC от момента t до окончания режима самонаведения. В свою очередь, стартовый угол θ измеряют на горизонтированной пусковой установке (ПУ) датчиком угла наклона на борту PC и/или датчиком угла наклона на ПУ с последующей передачей значения θ или t на борт PC. Наконец, стабилизацию PC в полете по крену осуществляют по информации от бортового свободного гироскопа и/или по информации от ГСН, визирующей контрастные ориентиры подстилающей поверхности.
Структурная схема устройства, реализующего работу (функционирование) по данному способу, представлена на фиг.1-6, схема полета PC - на фиг.7.
Приняты обозначения:
1 - головка самонаведения,
2 - устройство определения угла места θ (например, датчик угла наклона маятникового либо уровневого типа),
3 - бортовой вычислительный комплекса (БВК),
4 - свободный гироскоп стабилизации РС (ГО, АУ ГСН) по каналу крена,
5 - бортовой источник питания,
6 - рулевой привод,
7 - сигнализатор старта (например, типа акселерометра),
8 - датчик температуры.
На фиг. 1 показан вариант PC (PC с ГО) по предложенному способу, в котором реализовано АВТОНОМНОЕ предстартовое измерение угла места θ при помощи устройства 2, предстартовая раскрутка свободного гироскопа 4 (при этом рассогласование связанных осей координат PC (ГО) и вектора кинетического момента свободного гироскопа отслеживается посредством БВК 3). Послестартовое электропитание бортовых систем (и, одновременно, определение по началу поступления электропитания "ноля" бортового времени) обеспечивается бортовым источником электропитания 5, например, типа ампульной или термохимической батареи. БВК 3 обрабатывает достартовую информацию от устройства измерения θ 2, послестартовую информацию от свободного гироскопа 4 и ГСН 1 и выдает управляющие команды на рулевые привода 6.
На фиг. 2 показан вариант PC (PC с ГО), отличающийся от представленного на фиг. 1 организацией автономного канала стабилизации PC (ГО) по крену (управляющие команды по крену, пропорциональные рассогласованию вектора кинетического момента свободного гироскопа 4 и связанных осей координат PC (ГО), "напрямую" - минуя БВК 3 - подведены к рулевым приводам 6, обеспечивающим управление по крену). Следует отметить, что определение "напрямую" не исключает применения в канале специализированных блоков усиления, введения (изменения) передаточного отношения и т.п. (которые на фиг.1-6 не показаны).
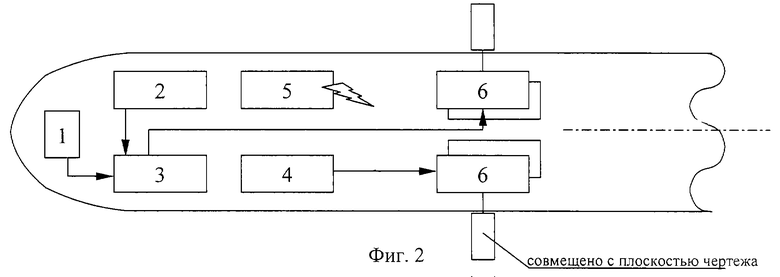
На фиг.3 изображен вариант PC (РС с ГО), в состав бортовых систем которого дополнительно введен специализированный сигнализатор старта 7 - для "сверхточного" определения "ноля" бортового времени, например, по осевой стартовой перегрузке. Дополнительно может быть введен также датчик температуры 8, на базе показаний которого БВК 3 корректирует значение расчетной стартовой скорости PC.
На фиг.4 представлен вариант PC (PC с ГО), в котором с целью упрощения и удешевления снаряда упразднено БОРТОВОЕ устройство измерения угла θ, но одновременно введено аналогичное устройство 2 на горизонтируемой пусковой установке - с вводом предстартового значения θ в БВК 3 каждого PC (ГО PC).
Другим вариантом упрощения и удешевления PC (PC с ГО) является упразднение БОРТОВОГО свободного гироскопа 4 (см. фиг.5) с передачей функций датчика уходов PC (ГО) по крену оптической ГСН 1. При этом алгоритмы обработки, принятые для ГСН 1, должны обеспечивать по изображению подстилающей поверхности и/или линии горизонта стабилизацию с требуемой точностью PC (ГО) по каналу крена.
Следует отметить, что на пусковой установке могут размещаться все системы, показания которых используются в алгоритмах работы БВК 3 ДО СТАРТА, а именно: устройство определения угла места 2, сигнализатор старта 7, датчик температуры 8 и также дополнительно анемометр (определение скорости ветра), барометр (определение атмосферного давления) и т.п. - с передачей информации от них на борт PC.
Вариант PC (PC с ГО) по предложенному способу, в котором достигается максимальное упрощение бортового управляющего комплекса, представлен на фиг. 6. Аналогично варианту, представленному на фиг.4, угол места θ вводится в БВК 3 от устройства определения θ 2, размещенного на горизонтируемой пусковой установке и единого для всех PC данной ПУ. Одновременно, аналогично варианту на фиг. 5 упразднен бортовой свободный гироскоп 4 (с передачей функций датчика крена на ГСН 1). На борту PC (PC с ГО), таким образом, из управляющих устройств размещены лишь ГСН 1 и БВК 3, при этом ГСН 1 выполняет функции датчика крена и обеспечивает возможность осуществления распознавания и самонаведения на цель, а БВК 3 с учетом "жестко зашитых" собственных алгоритмов и сигналов распознавания (наблюдаемых ориентиров) от ГСН 1 обеспечивает формирование управляющих команд на рулевые приводы 6 для стабилизации PC (ГО) по крену и коррекции попадающей в цель траектории PC (связки ГО + реактивный снаряд).
Схема полета PC по предложенному способу управления представлена на фиг. 7. Характерными точками на этой траектории являются старт, где определяется (измеряется) угол места θ и разарретируется свободный гироскоп стабилизации крена PC (ГО); далее - полет по баллистической кривой; начало работы ГСН по зоне цели - в расчетной точке t, при этом ось визирования антенны ГСН разворачивается (механически либо посредством электронного сканирования) в тангажной плоскости на угол γ относительно продольной оси снаряда; участок корректируемого полета, где БВК, отрабатывая информацию ГСН о рассогласовании связанных осей PC с направлением на цель и поддерживая стабилизацию PC (ГО) по крену, формирует команды управления для режима самонаведения PC на объект атаки.
Достартовый расчет времени начала работы ГСН по зоне цели t и угла разворота оси визирования антенны ГСН γ может быть проведен, например, по следующим исходным данным:
θ - угол места, измеряемый на борту РC (либо на пусковой установке с трансляцией значения θ на борт PC);
D - максимальная паспортная дальность работы ГСН PC по типовой цели (группе типовых целей) - константа БВК 3;
V0 - расчетная скорость PC после окончания работы его двигательной установки (для случая твердотопливных PC Vo ~ f (температуры топливного заряда), что, в частности, может быть оперативно и с требуемой точностью учтено введением датчика температуры 8; для случая массированного применения PC по площадной цели допускается использование табличного ("среднего расчетного") значения V0).
Расчет текущей (мгновенной) скорости реактивного снаряда V может быть произведен, например, по следующему алгоритму:
сначала определяем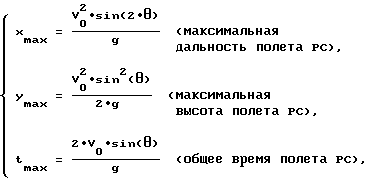
- расчетные зависимости движения PC в поле тяготения Земли (g - ускорение свободного падения) без учета возмущающих сил и моментов в системе координат Оху (см. фиг. 7: ось Ox - местная горизонталь в плоскости стрельбы, Оу - местная вертикаль, О - точка старта).
Основными возмущающими факторами при движении PC по баллистической кривой будем считать (см., например, "Справочник по технической механике" под ред. Динника А.Н. - М.: ОГИЗ Гостехиздат, 1949, с.189-192);
1 - силу лобового сопротивления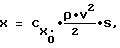
где CXo - коэффициент лобового сопротивления при нулевом угле атаки PC, определяемый конструктивно-технологическими параметрами изделия (константы БВК 3); ρ- плотность атмосферы, введена в БВК 3 для стандартной атмосферы как ρ = f (высоты полета); S - мидель PC (константа БВК 3); V - текущая скорость PC (вычисляется в БВК 3, например, пошаговым методом от V0);
2 - прочие силы аэродинамического сопротивления (волновое, профильное, индуктивное при появлении углов атаки PC и т.п.) - вычисляются по соответствующим формульным зависимостям по исходным данным, заложенным в БВК 3; интегрально составляют относительно небольшую добавку к X. Уточняют текущее (мгновенное) значение скорости V по траектории полета PC;
3 - подъемную силу, которая определяется преимущественно обводами носовой части корпуса PC и наличием несущих аэродинамических плоскостей (поверхностей); при симметричных обводах и профилях пропорциональна углу атаки (скольжения). Уточняет рассеяние PC по дальности и боковому отклонению;
4 - динамические характеристики (в частности, параметры устойчивости) PC, определяющие расчетные значения реализующихся углов атаки и скольжения по траектории полета, уровень прецессионных и нутационных колебаний (для вращающихся PC) и т.п. Используются в расчетных алгоритмах БВК 3, в результате чего дополнительно уточняется пространственно-временное положение PC по траектории его полета для каждого заданного момента времени;
5 - прочие возмущения, которые могут быть учтены как посредством расчета, так и путем введения поправочного коэффициента, определяемого по результатам экспериментальной отработки (отстрела) изделий на этапе, например, летно-конструкторских испытаний.
Расчет t и γ по представленным математическим моделям и экспериментальным данным может быть проведен как аналитическими, так и численными методами, причем допускается применение относительно "примитивных" БВК 3, поскольку указанный расчет производится ДО СТАРТА и не связан с реальным масштабом времени полета PC.
Применение предложенного технического решения представляется ОСОБЕННО целесообразным для вариантов со стабилизируемыми по крену ГО-модулями дооснащения штатных неуправляемых PC, например систем залпового огня: в этом случае можно наилучшим образом объединить "наработанную веками" кучность (добавим: простоту и дешевизну) НЕУПРАВЛЯЕМЫХ вращающихся реактивных снарядов с "примитивной" (минимум простейших бортовых средств) системой коррекции траектории и самонаведения на НЕНАБЛЮДАЕМЫЕ типовые цели в зоне обстрела. Таким образом, ВПЕРВЫЕ появляется возможность МАССИРОВАННОГО (следовательно, весьма эффективного) применения высокоточного УРО "поверхность - поверхность" в реальном масштабе времени боя БЕЗ ввода на борт PC полетного задания (т. е. при этом не требуется повышения существующей квалификации боевого расчета). Можно прогнозировать, что с учетом критерия "стоимость - эффективность", комплексы УРО на базе предложенного технического решения могут составить наиболее многочисленный класс т. н. легкого высокоточного оружия "поверхность - поверхность" ближайшего будущего.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| УПРАВЛЯЕМЫЙ РЕАКТИВНЫЙ СНАРЯД | 1999 |
|
RU2164657C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ РАКЕТНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2718560C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ОПТИЧЕСКОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2004 |
|
RU2280590C2 |
| РАЗЪЕМ БОРТОВОЙ | 2001 |
|
RU2216834C2 |
| СПОСОБ СТАРТА УПРАВЛЯЕМОЙ РАКЕТЫ ИЗ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240489C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2000 |
|
RU2166726C1 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
Изобретение относится к военной технике, преимущественно к тактическим системам управляемого ракетного оружия (УРО) класса "поверхность - поверхность", обеспечивающим поражение целей самонаводящимися баллистическими реактивными снарядами (РС). Технический результат - повышение точности наведения РС на цель. Согласно изобретению прием информации от головки самонаведения (ГСН) начинают в момент времени t, определяемый до запуска РС по значению стартового угла θ между продольной осью РС и плоскостью горизонта, а также по табличным значениям начальной скорости РС, аэродинамического сопротивления РС и максимальной дальности работы ГСН по типовой цели. При этом угол наклона γ оси визирования антенного устройства ГСН в точку прицеливания определяют до запуска РС по конфигурации баллистической траектории РС, параметрам вращения (либо стабилизации, например, для стабилизированных ГО) по крену и времени полета РС от момента t до окончания режима самонаведения. В свою очередь, стартовый угол θ измеряют на горизонтированной пусковой установке (ПУ) датчиком угла наклона на борту РС и/или датчиком угла наклона на ПУ с последующей передачей θ или t на борт РС. Наконец, стабилизацию РС в полете по крену осуществляют по информации от бортового свободного гироскопа и/или по информации от ГСН, визирующей контрастные ориентиры подстилающей поверхности. Применение предложенного технического решения представляется особенно целесообразным для вариантов со стабилизируемыми по крену ГО-модулями дооснащения штатных неуправляемых РС. Можно прогнозировать, что с учетом критерия "стоимость - эффективность" комплексы УРО на базе предложенного технического решения могут составить наиболее многочисленный класс т.н. легкого высокоточного оружия "поверхность - поверхность" ближайшего будущего. 3 з.п.ф-лы, 7 ил.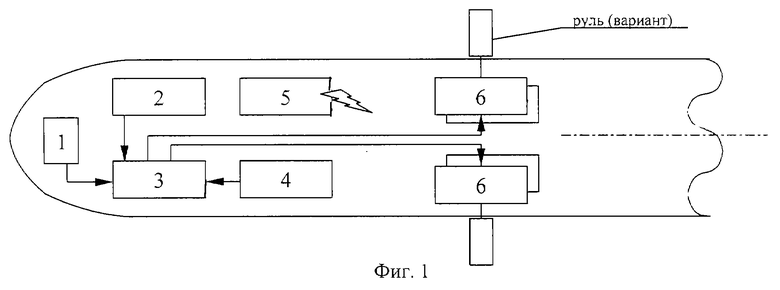
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| СПОСОБ СТРЕЛЬБЫ АРТИЛЛЕРИЙСКИМ УПРАВЛЯЕМЫМ СНАРЯДОМ | 1999 |
|
RU2165589C1 |
| СПОСОБ ФОРМИРОВАНИЯ И ПРОВЕРКИ ПОДЛИННОСТИ КОЛЛЕКТИВНОЙ ЭЛЕКТРОННОЙ ЦИФРОВОЙ ПОДПИСИ, ЗАВЕРЯЮЩЕЙ ЭЛЕКТРОННЫЙ ДОКУМЕНТ | 2011 |
|
RU2450438C1 |
| US 4383662, 17.05.1983 | |||
| US 4606514, 19.08.1986. | |||

