Предлагаемый способ относится к радиолокационной технике и может найти применение в горноспасательных работах для дистанционного обнаружения жертв аварии, поиска заблудившихся и потерявшихся в лесу, терпящих бедствие в морских условиях рыбаков, особенно в условиях малой видимости, для поиска туристов, геологов, а также для дистанционного опознания пострадавших при чрезвычайных и иных обстоятельствах (несчастные случаи, боевые действия, катастрофы, стихийные бедствия, природные катаклизмы и т.д.).
Известны способы обнаружения терпящих бедствие (авт. свид. СССР 385.819, 431.063, 637.298, 765.113, 988.655, 1.348.256, 1.505.840, 1.505.841, 1.588.636, 1.615.054, 1.643.325, 1.664.653, 1.832.237; патенты РФ 2.000.995, 2.009.956, 2.038.259, 2.043.259, 2.051.838; патенты США 3.621.501, 4.646.090, 4.889.511; патент Великобритании 1.145.051; патент ФРГ 2.555.505; патент Дании 103.118 и другие).
Из известных способов наиболее близким к предлагаемому является "Способ обнаружения терпящих бедствие" (авт. свид. СССР 1.832.237, G 01 S 7/292, 1991), который и выбран в качестве прототипа.
Данный способ основан на излучении N поисковых сигналов с неравными значениями частот, где N≥2, удовлетворяющих условию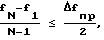
(где f1. ..fN - значение частот поисковых сигналов; Δfпр - заданная полоса приема), приеме переизлученного приемоответчиком (нелинейным элементом), размещенным на терпящем бедствие, сигнала на несущей частоте f1+fN с последующим его обнаружением.
Однако указанный способ обеспечивает только обнаружение терпящих бедствие и не позволяет их запеленговать и получить дополнительную информацию о терпящих бедствие.
Технической задачей изобретения является расширение функциональных возможностей способа путем пеленгации терпящих бедствие и получения дополнительной информации о них.
Поставленная задача решается тем, что согласно способу обнаружения терпящих бедствие, заключающемся в излучении сигнала, приеме переизлученного приемоответчиком, размещенным на терпящем бедствие, сигнала в заданной полосе приема Δfпр с последующим его обнаружением, в качестве зондирующего сигнала, излучаемого передатчиком сканирующего устройства, используют широкополосный сигнал с фазовой манипуляцией, а в качестве приемоответчика используют линию задержки на поверхностных акустических волнах и интегрированную с ней приемно-передающую антенну, принимаемый приемником сканирующего устройства широкополосный сигнал с фазовой манипуляцией преобразуют по частоте в измерительном канале, умножают его фазу на два, измеряют ширину спектра преобразованного по частоте широкополосного сигнала с фазовой манипуляцией и его второй гармоники, сравнивают их между собой и по результатам сравнения разрешают дальнейшую обработку преобразованного по частоте широкополосного сигнала с фазовой манипуляцией, делят фазу второй гармоники сигнала на два, выделяют ее узкополосным фильтром и используют для синхронного детектирования преобразованного по частоте широкополосного сигнала с фазовой манипуляцией, одновременно преобразованный по частоте широкополосный сигнал с фазовой манипуляцией перемножают с принимаемыми в четырех пеленгационных каналах широкополосными сигналами с фазовой манипуляцией, выделяют гармонические сигналы на частоте гетеродина, измеряют между ними и напряжением гетеродина фазовые сдвиги, по которым определяют фазовым методом в двух взаимно перпендикулярных плоскостях направления на терпящего бедствие, при этом приемные антенны измерительного и пеленгационных каналов размещают в виде прямого геометрического угла, в вершине которого помещают приемную антенну измерительного канала.
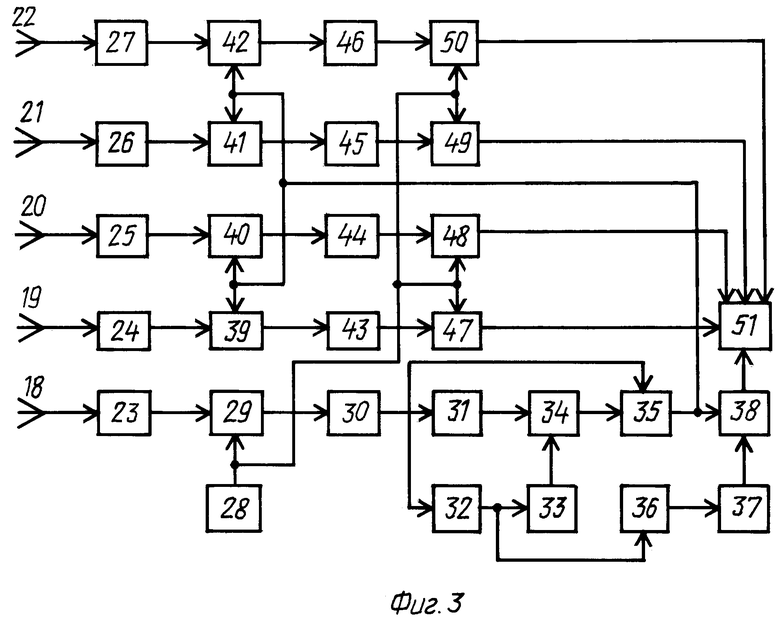
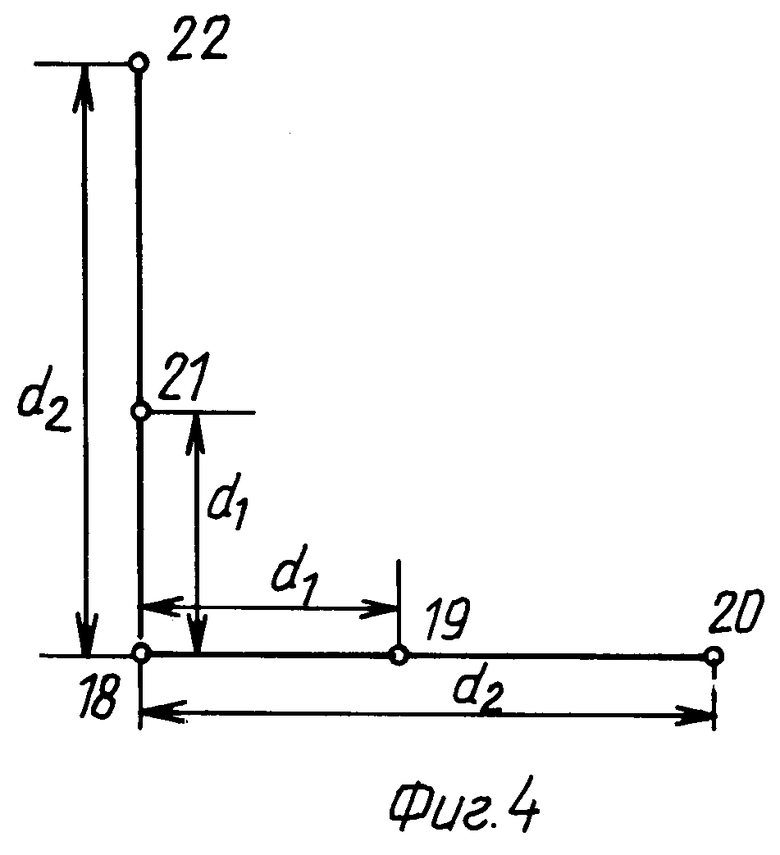
Структурная схема передатчика сканирующего устройства представлена на фиг. 1. Структурная схема приемоответчика изображена на фиг.2. Структурная схема приемника сканирующего устройства представлена на фиг. 3. Взаимное расположение приемных антенн показано на фиг.4. Временные диаграммы, помнящие принцип работы способа обнаружения терпящих бедствие, изображены на фиг.5.
Передатчик сканирующего устройства содержит последовательно включенные задающий генератор 1, фазовый манипулятор 3, второй вход которого соединен с выходом генератора 2 модулирующего кода, усилитель 4 мощности и передающую антенну 5.
Встречно-штыревой преобразователь ПАВ содержит электроды 6, шины 7, 8, звукопровод 9, сумматор 10, блок 11 управления, согласованный фильтр 12, рециркулярный контур 13, сумматор 14, линию 15 задержки, вентиль 16 и усилитель 17.
Приемник сканирующего устройства содержит измерительный и четыре пеленгационных канала. Измерительный канал содержит последовательно включенные приемную антенну 18, усилитель 23 высокой частоты, смеситель 29, второй вход которого соединен с выходом гетеродина 28, усилитель 30 промежуточной частоты, удвоитель 32 фазы, второй анализатор 33 спектра, блок 34 сравнения, второй вход которого через первый анализатор 31 спектра соединен с выходом усилителя 30 промежуточной частоты, ключ 35, второй вход у которого соединен с выходом усилителя 30 промежуточной частоты, фазовый детектор 38, второй вход которого через последовательно включенные делитель 36 фазы на два и узкополосный фильтр 37 соединен с выходом удвоителя 32 фазы, и блок 51 регистрации.
Каждый пеленгационный канал состоит из последовательно включенных приемной антенны 19 (20, 21,22), усилителя 24 (25, 26, 27) высокой частоты, перемножителя 39 (40, 41, 42), второй вход которого соединен с выходом ключа 35, узкополосного фильтра 43 (44, 45, 46) и фазометра 47 (48, 49, 50), выход которого подключен к блоку 51 регистрации.
Предлагаемый способ реализуется следующим образом.
Каждый предполагаемый участник мероприятий, которые могут сделать этого участника потенциально пострадавшим, должен быть снабжен достаточно простым, надежным и миниатюрным устройством (типа брелка, кольца или медальона), которое не должно затруднять обычную жизнедеятельность владельца, но должно нести на себе необходимую уникальную информацию об этом владельце. Второе важное требование к этому устройству - предоставляемая возможность дистанционного считывания несущей им информации неограниченное число раз без какого бы то ни было участия владельца.
Этим требованиям удовлетворяет система, реализующая предлагаемый способ. Она включает в себя сканирующее устройство и приемоответчик.
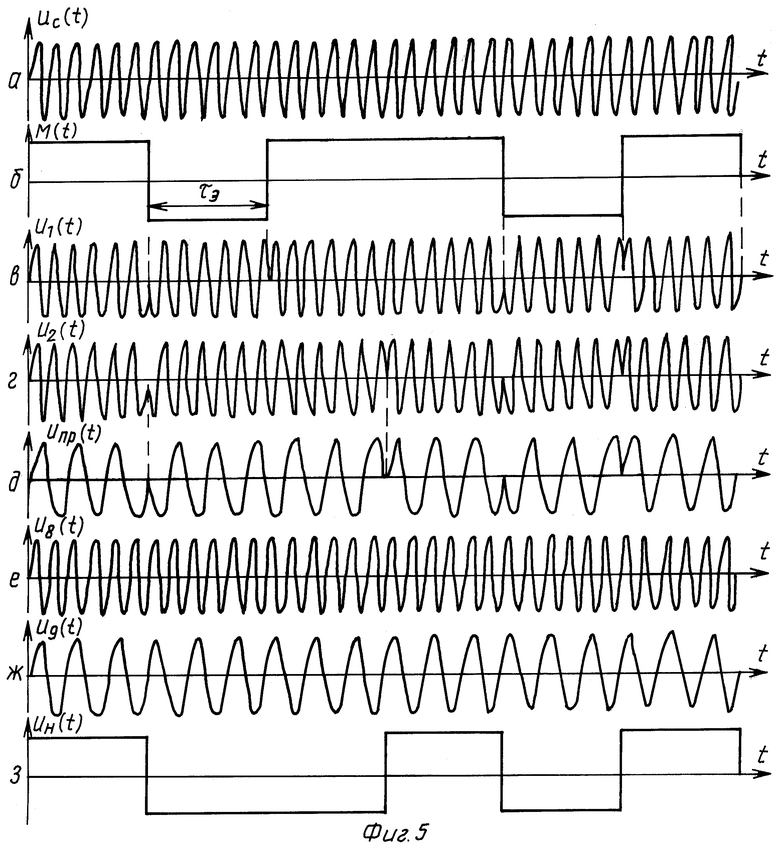
Передатчик сканирующего устройства формирует сигнал запроса. С этой целью задающий генератор 1 генерирует высокочастотное колебание (фиг.5, а)
Uc(t)=Vc•Cos•(Wct+ϕc), 0≤t≤Тс,
где Vc, Wc, ϕc, Тс - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания;
которое поступает на первый вход фазового манипулятора 3, на второй вход которого подается моделирующий код М(t) (фиг.5, б) с выхода генератора 2 модулирующего кода. На выходе фазового манипулятора 3 образуется фазоманипулированный (ФМН) сигнал (фиг.5, в)
U1(t) = Vc•cos•[Wct+ϕк1(t)+ϕc], 0≤t≤Тс,
где ϕк1(t) = {0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции, причем ϕк1(t)=cоnst при Kτэ<t<(K+1)τэ и может изменяться скачком при t = Kτэ, т.е. на границах между элементарными посылками (К=1,..., N-1),
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Tc(Tc = Nτэ).
Данный сигнал после усиления в усилителе 4 мощности излучается передающей антенной 5 в эфир и принимается антенной приемоответчика. Последний представляет собой пьезокристалл с нанесенным на его поверхность алюминиевым тонкопленочным преобразователем и набором отражателей. Преобразователь подключен к микрополосковой антенне (не показана), которая также может быть изготовлена на поверхности пьезокристалла.
Принцип действия приемоответчика основан на акустической обработке широкополосных сигналов с фазовой манипуляцией с помощью прибора на поверхностных акустических волнах (ПАВ). Поверхностные акустические волны - это волны, распространяющиеся вдоль поверхности твердых тел в относительно тонком поверхностном слое. Скорость распространения ПАВ в кристаллах примерно на пять порядков меньше скорости распространения электромагнитных колебаний. Это значит, что на сантиметре кристалла можно уместить информацию, которая заполнит кабель длиной в километр. Высокая информационная емкость приборов на поверхностных акустических волнах впервые была использована в линиях задержки, которые позволяют хранить, преобразовывать, канализировать, отводить и отражать распространяющиеся в них сигналы.
В основе работы приборов на ПАВ лежат три физические процесса:
- преобразование входного электрического сигнала в акустическую волну;
- распространение акустической волны вдоль поверхности звукопровода;
- обратное преобразование ПАВ в электрический сигнал.
Для прямого и обратного преобразования ПАВ используются преобразователи поверхностных акустических волн, наибольшее распространение среди которых получили встречно-штыревые преобразователи (ВШП).
Встречно-штыревой преобразователь ПАВ (фиг.2, а) состоит из двух гребенчатых систем электродов 6, нанесенных на поверхность звукопровода 9. Электроды каждой из гребенок соединены друг с другом шинами 7 и 8. Шины в свою очередь связаны с источником сигнала или с нагрузкой. Принцип работы электродных преобразователей основан на том, что переменные в пространстве и времени электрические поля, создаваемые в пьезоэлектрическом кристалле системой электродов, вызывают из-за пьезоэффекта упругие деформации, которые распространяются в кристалле в виде ПАВ.
Согласованная фильтрация ФМН-сигналов реализуется с помощью многоотводной линии задержки на ПАВ, сигналы с отводов которой умножаются на соответствующие весовые коэффициенты и линейно суммируются. В результате получается встречно-штыревая структура, вид которой определяется модулирующим кодом М(t). В качестве примера на фиг.2, б показана структура для кода 10101110.
При изменении структуры сложных ФМН-сигналов используются адаптивные (программируемые) согласованные фильтры, способные изменять свою импульсную характеристику в соответствии с изменением структуры анализируемого сигнала. Решение данной проблемы возможно путем когерентного накопления выходных сигналов программируемого согласованного фильтра в рециркулярном контуре 13 (фиг.2, в).
Оптимальная обработка в этом контуре осуществляется в два этапа. На первом этапе выполняется посегментная согласованная фильтрация принимаемого ФМН-сигнала с помощью согласованного фильтра 12, импульсная характеристика которого задается блоком программного управления 11. При совпадении программы управления импульсной характеристикой согласованного фильтра 12 с законом формирования принимаемого ФМН-сигнала на выходе согласованного фильтра формируется последовательность корреляционных пиков небольшого уровня, отстоящих друг от друга на время задержки входного сигнала в согласованном фильтре 12. На втором этапе осуществляется когерентное накопление этих пиков в рециркуляционном контуре 13, состоящем из сумматора 14, линии задержки 15 с временем задержки, равным периоду следования корреляционных пиков, вентиля 16, задающего длительность интервала накопления, и усилителя 17, компенсирующего ослабление выходного сигнала согласованного фильтра 12 в элементах контура рециркуляции. В результате когерентного накопления отношение сигнал/шум на выходе рециркуляционного контура 13 увеличивается пропорционально количеству циклов накопления.
Следовательно, ФМН-сигнал U1(t), излученный передающей антенной 5 и принятый антенной приемоответчика (не показана), преобразуется в акустическую волну, модифицируется уникальным, зависящим от топологии приемоответчика образом. Затем акустическая волна претерпевает обратное преобразование в ФМН-сигнал, который поступает в антенну и излучается в пространство (фиг.5, г)
U2(t) = V2•cos[Wct+ϕк2(t)+ϕ2], 0≤t≤Тс,
Данный сигнал улавливается приемными антеннами 18-22:
U3(t) = V3•cos[(Wc±ΔW)t+ϕк2(t)+ϕ3],
U4(t) = V4•cos[(Wc±ΔW)t+ϕк2(t)+ϕ4],
U5(t) = V5•cos[(Wc±ΔW)t+ϕк2(t)+ϕ5],
U6(t) = V6•cos[(Wc±ΔW)t+ϕк2(t)+ϕ6],
U7(t) = V7•cos[(Wc±ΔW)tt+ϕк2(t)+ϕ7],
где ±ΔW - нестабильность несущей частоты, вызванная различными дестабилизирующими факторами, в том числе и эффектом Доплера.
Причем приемные антенны 18-22 располагаются в виде геометрического прямого угла, в вершине которого помещают приемную антенну 18 измерительного канала, общую для четырех пеленгационных каналов, расположенных в азимутальной и угломестной плоскостях, по два на каждую плоскость, образуя тем самым в каждой плоскости две измерительные базы d1 и d2, между которыми устанавливают неравенство:
d1/λ<1/2≤d2/λ,
где λ - длина волны.
При этом меньшие базы d1 образуют грубые, но однозначные шкалы отсчета углов, а большие базы d2 образуют точные, но неоднозначные шкалы отсчета углов.
Сканирующее устройство может быть установлено на транспортном средстве, вертолете, самолете или космическом аппарате.
Напряжение U3(t) с выхода приемной антенны 18 через усилитель 23 высокой частоты поступает на первый вход смесителя 29, на второй вход которого подается напряжение гетеродина 28
Uг(t)=Vг•сos•(Wгt+ϕг).
На выходе смесителя 29 образуются напряжения комбинационных частот. Усилителем 30 выделяется напряжение промежуточной (разностной) частоты (фиг. 5, д):
Uпр(t) = Vпр•cos[(Wпр±ΔW)t+ϕк2(t)+ϕпр], 0≤t≤Тс,
где Vпр=•1/2К1•V3•Vг
K1 - коэффициент передачи смесителя;
Wпр=Wc-Wг - промежуточная частота;
ϕпр = ϕз-ϕг,
которое поступает на вход удвоителя 32 фазы, на выходе которого образуется гармоническое напряжение (фиг.5, е)
U8(t)=Vпр•сos•[2(Wпр±ΔW)t+2ϕпр], 0≤t≤Тс,
в котором фазовая манипуляция уже отсутствует [2ϕк2(t) = {0,2π}].
Ширина спектра сложного ФМН-сигнала определяется длительностью τэ его элементарных посылок (Δfc = 1/τэ). Тогда как ширина спектра его второй гармоники определяется длительностью сигнала Тс(Δf2=1/Тc). Следовательно, при умножении фазы на два широкополосного ФМН-сигнала его спектр сворачивается в N раз
Δfc/Δf2 = N.
Это обстоятельство позволяет обнаружить и отселектировать широкополосный ФМН-сигнал среди других сигналов и помех.
Ширина спектра широкополосного ФМН-сигнала измеряется с помощью анализатора 31 спектра, а ширина спектра Δf2 его второй гармоники измеряется с помощью анализатора 33 спектра. Напряжения V0 и V2, пропорциональные Δfc и Δf2 соответственно, с выходов анализаторов 31 и 33 спектра поступают на два входа блока 34 сравнения.
Если на два входа блока 34 сравнения поступают приблизительно одинаковые по интенсивности напряжения, то на его выходе напряжение отсутствует. Если на два входа блока 34 сравнения поступают разные по интенсивности напряжения, то на его выходе появляется постоянное напряжение.
Так как V0>V2, то на выходе блока 34 сравнения формируется постоянное напряжение, которое поступает на управляющий вход ключа 35, открывая его. В исходном состоянии ключ 35 всегда закрыт.
При этом ФМН-сигнал Uпр(t) (фиг.5, д) на промежуточной частоте через открытый ключ 35 поступает на первый вход фазового детектора 38.
Напряжение U8(t) (фиг.5, е) с выхода удвоителя 32 фазы поступает на вход делителя 36 фазы на два, на выходе которого образуется гармоническое напряжение (фиг.5, ж)
U9(t)=Vпр•сos•[(Wпр±ΔW)t+ϕпр], 0≤t≤Тс,
которое выделяется узкополосным фильтром 37, используется в качестве опорного напряжения и подается на опорный вход фазового детектора 38. На выходе фазового детектора 38 образуется низкочастотное напряжение (фиг.5, з)
Uн(t)=Vн•сos•ϕк2(t),
где Vн=1/2К2•Vпр2,
К2 - коэффициент передачи фазового детектора, которое фиксируется блоком 51 регистрации.
В низкочастотном напряжении Uн(t) содержатся паспортные данные о потерпевшем бедствие.
Напряжение Uпр(t) (фиг.5, д) с выхода усилителя 30 промежуточной частоты через открытый ключ 35 одновременно подается на вторые входы перемножителей 39-42 пеленгационных каналов, на первые входы которых поступают принимаемые ФМН-сигналы U4(t)-U7(t) с выходов усилителей 24-27 высокой частоты. На выходах перемножителей 39-42 образуются следующие гармонические колебания:
U10(t)=V10•cos•(Wгt+ϕг+Δϕ1);
U11(t)=V11•cos•(Wгt+ϕг+Δϕ2);
U12(t)=V12•cos•(Wгt+ϕг+Δϕ3/ );
U13(t)=V13•cos•(Wгt+ϕг+Δϕ4),
где V10=•1/2К3•V4•Vпр;
V11=•1/2К3•V5•Vпр;
V12=•1/2К3•V6•Vпр;
V13=•1/2К3•V7•Vпр;
К3 - коэффициент передачи перемножителей;
Δϕ1 = ϕ4-ϕ3 = 2π(d1/λ)•cosα;
Δϕ2 = ϕ5-ϕ3 = 2π(d2/λ)•cosα;
Δϕ3 = ϕ6-ϕ3 = 2π(d1/λ)•cosβ;
Δϕ4 = ϕ7-ϕ3 = 2π(d2/λ)•cosβ;
где d1, d2 - измерительные базы;
α,β - угловые координаты потерпевшего бедствие (азимут и угол места),
которые выделяются узкополосными фильтрами 43-46 и поступают на первые входы фазометров 47-50, на вторые входы которых подается напряжение Uг(t) гетеродина 28.
Измеренные фазометрами 47-50 фазовые сдвиги Δϕ1-Δϕ4, определяющие направление на потерпевшего бедствие, фиксируются блоком 51 регистрации.
Таким образом, предлагаемый способ по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает не только обнаружение терпящих бедствие, но и их пеленгацию, а также дистанционное опознание терпящих бедствие. Причем пеленгация осуществляется на стабильной частоте гетеродина, способ инвариантен к виду модуляции и нестабильности несущей частоте используемых широкополосных сигналов.
С точки зрения обнаружения указанные сигналы обладают энергетической и структурной скрытностью.
Энергетическая скрытность широкополосных ФМН-сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого широкополосный ФМН-сигнал в точке приема может оказаться замаскирован шумами. Причем энергия широкополосного сигнала отнюдь не мала, она просто распределена по частотно-временной области так, что в каждой точке этой области мощность сигнала меньше мощности шумов.
Структурная скрытность широкополосных ФМН-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку широкополосных сигналов априорно неизвестной структуры с целью повышения чувствительности приемного устройства.
Широкополосные ФМН-сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляется новая возможность выделять эти сигналы среди других сигналов и помех, действующих в той же полосе частот и в те же промежутки времени.
Достоинством предлагаемого способа является также высокая эффективность использования частотного диапазона, так как для обнаружения многих терпящих бедствие может быть использован радиоканал одной частоты, например fc=26,945 КГц, выделенной для дистанционной охранной сигнализации.
Тем самым функциональные возможности способа расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2005 |
|
RU2311623C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2306159C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРОТИВОТРАНСПОРТНЫХ МИН | 2001 |
|
RU2213999C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2009 |
|
RU2402787C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2248235C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2288486C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2002 |
|
RU2226479C2 |

Изобретение относится к радиолокационной технике и может найти применение в горноспасательных работах для дистанционного обнаружения жертв аварии, поиска заблудившихся и потерявшихся в лесу, терпящих бедствие в морских условиях рыбаков, для поиска туристов, геологов, а также для дистанционного опознавания пострадавших при чрезвычайных и иных обстоятельствах. Предлагаемый способ реализуется приемоответчиком и сканирующим устройством, передатчик которого содержит задающий генератор, генератор модулирующего кода, фазовый манипулятор, усилитель мощности и передающую антенну. Приемник сканирующего устройства содержит пять приемных антенн, пять усилителей высокой частоты, гетеродин, смеситель, усилитель промежуточной частоты, два анализатора спектра, удвоитель фазы, блок сравнения, ключ, делитель фазы на два, узкополосный фильтр, фазовый детектор, четыре перемножителя, четыре узкополосных фильтра, четыре фазометра и блок регистрации. Принцип действия приемоответчика основан на акустической обработке широкополосных сигналов с фазовой манипуляцией с помощью встречно-штыревого преобразователя поверхностных акустических волн (ПАВ). Достигаемым техническим результатом изобретения является расширение функциональных возможностей способа путем пеленгации терпящих бедствие и получение дополнительной информации о них. 5 ил.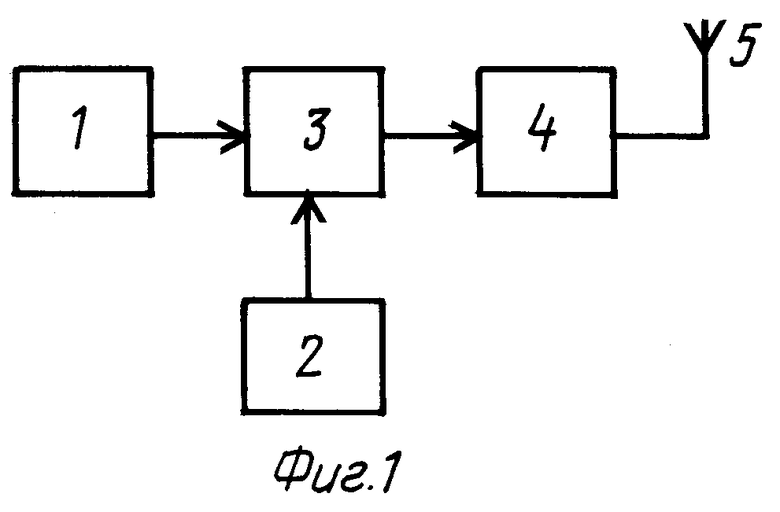
Способ обнаружения терпящих бедствие, заключающийся в излучении сигнала, приеме переизлученного приемоответчиком, размещенным на терпящем бедствие, сигнала в заданной полосе приема Δfпр с последующим его обнаружением, отличающийся тем, что в качестве зондирующего сигнала, излучаемого передатчиком сканирующего устройства, используют широкополосный сигнал с фазовой манипуляцией, а в качестве приемоответчика используют линию задержки на поверхностных акустических волнах и интегрированную с ней приемопередающую антенну, принимаемый приемником сканирующего устройства, содержащим измерительный и четыре пеленгационных канала, широкополосный сигнал с фазовой манипуляцией преобразуют по частоте в измерительном канале, умножают его по фазе на два, измеряют ширину спектра преобразованного по частоте широкополосного сигнала с фазовой манипуляцией и его второй гармоники, сравнивают их между собой и по результатам сравнения разрешают дальнейшую обработку преобразованного по частоте широкополосного сигнала с фазовой манипуляцией, делят фазу второй гармоники на два, выделяют полученное гармоническое напряжение узкополосным фильтром и используют его для синхронного детектирования преобразованного по частоте широкополосного сигнала с фазовой манипуляцией, одновременно преобразованный по частоте широкополосный сигнал с фазовой манипуляцией перемножают с принимаемыми в четырех пеленгационных каналах широкополосными сигналами с фазовой манипуляцией, выделяют гармонические сигналы на частоте гетеродина, измеряют между ними и напряжением гетеродина фазовые сдвиги, по которым определяют фазовым методом в двух взаимно перпендикулярных плоскостях направления на терпящего бедствие, при этом приемные антенны измерительного и пеленгационных каналов размещают в виде геометрического прямого угла, в вершине которого помещают приемную антенну измерительного канала.
| SU 1832237 А1, 07.08.1993 | |||
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2155352C1 |
| US 4947177, 07.08.1990 | |||
| US 4646090, 24.02.1987. | |||

