Изобретение относится к радиолокационной технике и может найти применение в горноспасательных работах для дистанционного обнаружения жертв аварий, поиска заблудившихся и потерявшихся в лесу, терпящих бедствие в морских условиях рыбаков, особенно при плохой видимости, для поиска туристов, геологов, а также для дистанционного обнаружения пострадавших при чрезвычайных и иных обстоятельствах (несчастные случаи, боевые действия, катастрофы, стихийные бедствия, природные катаклизмы и т.д.).
Известны способы обнаружения терпящих бедствие (авторские свидетельства СССР №№988.655, 1.348.256, 1.505.840, 1.588.636, 1.615.054, 1.664.653, 1.832.237; патенты РФ №№2.000.995, 2.009.956, 2.038.259, 2,043.259, 2.051.956, 2.206.902, 2.346.290; патенты США №№3.621.501, 4.646.090, 4.889.511; патент Великобритании №1.145.051; патент Германии №2.555.505 и другие).
Из известных способов наиболее близким к предлагаемому является «Способ обнаружения терпящих бедствие» (патент РФ №2.346.290, G01S 7/292, 2007 г.), который и выбран в качестве прототипа.
Известный способ реализуется приемоответчиком и сканирующим устройством.
Принцип действия приемоответчика основан на акустоэлектронной отработке сложных сигналов с фазовой манипуляцией (Фмн) с помощью встречно-штыревого преобразователя (Вшп) поверхностных акустических волн (ПАВ).
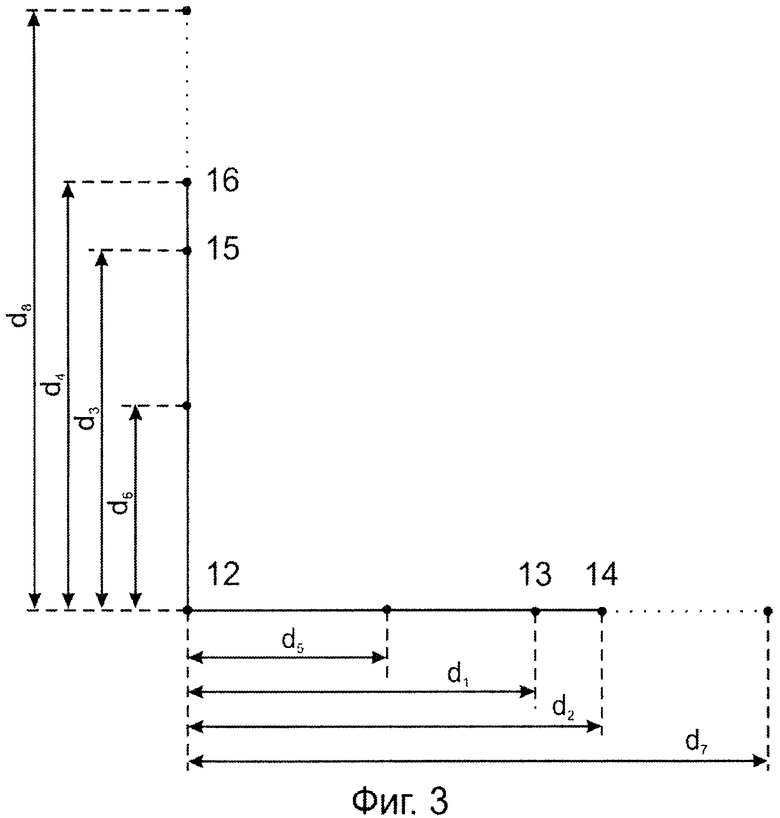
Приемник сканирующего устройства содержит пять приемных антенн, которые располагаются в виде геометрического прямого угла, в вершине которого помещают приемную антенну измерительного канала, общую для четырех пеленгационных каналов, расположенных в азимутальной и угломестной плоскостях, по два на каждую плоскость, образуя тем самым в каждой плоскости две измерительные базы. Для увеличения диапазона однозначного измерения азимута и угла места при малой длине грубых измерительных баз, указанные базы формируются косвенным методом.
Известный способ обеспечивает точное и однозначное измерение фазовым методом только угловых координат (азимута и угла места) потерпевшего бедствие, а также позволяет определить идентификационный номер потерпевшего бедствие, снабженного приемоответчиком.
Однако для определения местоположения потерпевшего бедствие необходимо измерить не только угловые координаты, но и дальность до него, а для повышения достоверности определения идентификационного номера потерпевшего бедствие необходимо устранить явление «обратной работы», присущее известному способу.
Технической задачей изобретения является расширение функциональных возможностей известного способа путем определения дальности до потерпевшего бедствие, а также повышение достоверности определения идентификационного номера потерпевшего бедствие путем устранения явления «обратной работы».
Поставленная задача решается тем, что способ обнаружения терпящих бедствие, заключающийся, в соответствии с ближайшим аналогом, в излучении сигнала, приема переизлученного приемоответчиком, размещенным на терпящим бедствие, сигнала в заданный полосе приема Δfпр с последующим его обнаружением, при этом в качестве зондирующего сигнала, излучаемого передатчиком сканирующего устройства, используют широкополосный сигнал с разовой манипуляцией, а в качестве приемоответчика используют линию задержки на поверхностных акустических волнах и интегрированную с ней микрополосковую приемопередающую антенну, принимаемый приемником сканирующего устройства, содержащим измерительный и четыре пеленгационных канала, широкополосный сигнал с фазовой манипуляцией преобразуют по частоте в измерительном канале, умножают его по фазе на два, измеряют ширину сектора преобразованного по частоте широкополосного сигнала с фазовой манипуляцией и его второй гармоникой, сравнивают их между собой и по результатам сравнения разрешают дальнейшую обработку преобразованного по частоте широкополосного сигнала с фазовой манипуляцией, делят фазу второй гармоники на два, выделяют полученное гармоническое напряжение узкополосным фильтром и используют его в качестве опорного напряжения для синхронного детектирования преобразованного по частоте широкополосного сигнала с фазовой манипуляцией, одновременно преобразованный по частоте широкополосный сигнал с фазовой манипуляцией перемножают с принимаемыми в четырех пеленгационных каналах широкополосными сигналами с фазовой манипуляцией, выделяют гармонические сигналы на частоте гетеродина, измеряют между ними и напряжением гетеродина фазовые сдвиги:
Δφ1=φ1-φг=2πd1/λCosα;
Δφ2=φ2-φг=2πd2/λCosα;
Δφ3=φ3-φг=2πd3/λCosβ;
Δφ4=φ4-φг=2πd4/λCosβ;
где d1, d2, d3, d4 - измерительные базы;
λ - длина волны;
α, β - азимут и угол места,
в каждой плоскости формируют две измерительные базы d1 и d2, d3 и d4, определяют разности разностей фаз:
Δφр1=Δφ2-Δφ1, Δφр2=Δφ4-Δφ3,
эквивалентные измерению фазовых сдвигов на измерительных базах, длина которых:
d5=d2-d1, d6=d4-d3,
формируют с использованием разности разностей фаз грубые, но однозначные шкалы отсчета углов α и β, соответствующие малым измерительным базам d5 и d6, определяют сумму разностей фаз:
ΔφΣ1=Δφ1+Δφ2, ΔφΣ2=Δφ3+Δφ4,
эквивалентные измерению фазовых сдвигов на измерительных базах, длина которых:
d7=d1+d2, d8=d3+d4,
формируют с использованием суммы разностей фаз точные, но неоднозначные шкалы отсчета углов α и β, соответствующие большим измерительным базам d7 и d8, приемные антенны измерительного и пеленгационных каналов размещают в виде геометрического прямого угла, в вершине которого помещают антенну измерительного канала, отличается от ближайшего аналога тем, что передающую антенну передатчика и приемную антенну измерительного канала приемника сканирующего устройства объединяют и используют как одну приемопередающую антенну, которую связывают с передатчиком и приемником через дуплексер, зондирующий сложный сигнал с фазовой манипуляцией передатчика пропускают через блок регенерируемой задержкой, перемножают его с ретранслированным сложным сигналом с фазовой манипуляцией измерительного канала приемника, выделяют низкочастотное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию R(τ) на максимальном уровне, фиксируют временную задержку τ3 между зондирующим и ретранслированным сигналами и по ее значению определяют дальность до приемоответчика, размещенного на терпящем бедствие, определяют моменты скачкообразного изменения фазы опорного напряжения под воздействием различных дестабилизирующих факторов, возвращают фазу опорного напряжения в исходное состояние, стабилизируя тем самым фазу опорного напряжения и устраняя явление «обратной работы».
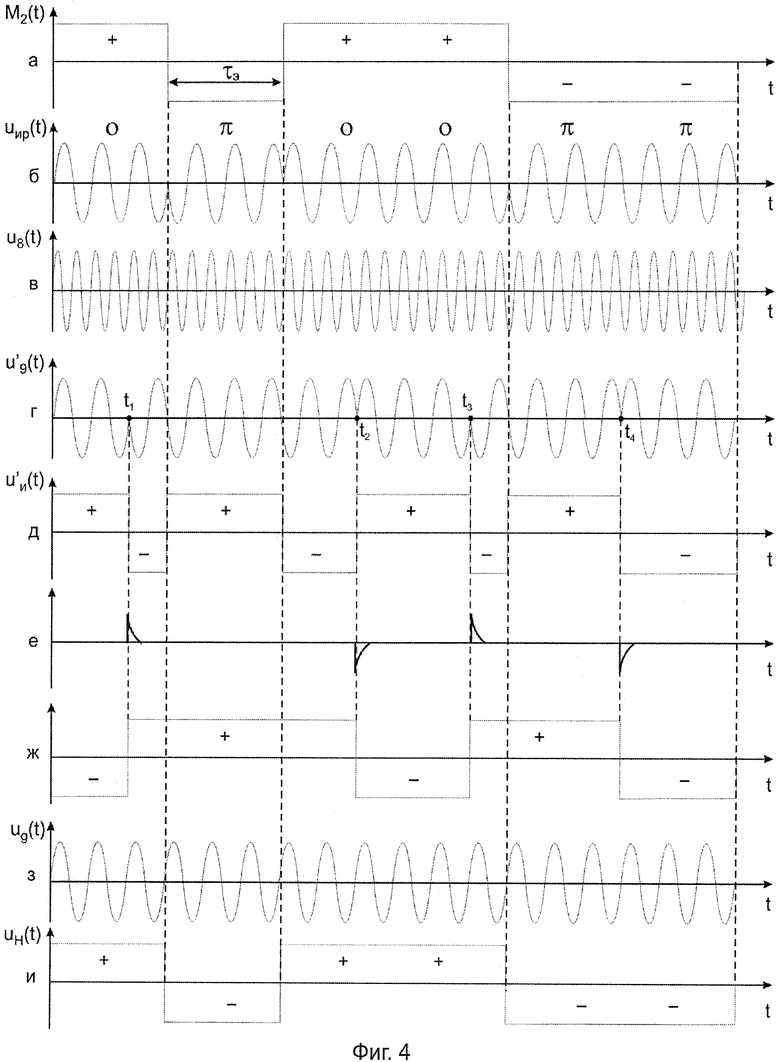
Структурная схема сканирующего устройства представлена на фиг.1. Структурная схема приемоответчика изображена на фиг.2. Взаимное расположение приемных антенн показано на фиг.3. Взаимные диаграммы, поясняющие работу сканирующего устройства, изображены на фиг.4.
Сканирующее устройство содержит последовательно включенные задающий генератор 1, фазовый манипулятор 3, второй вход которого соединен с выходом генератора 2 модулирующего кода, усилитель 4 мощности, дуплексер 50, вход-выход которого связан с приемопередающей антенной 12, усилитель 17 высокой частоты, смеситель 23, второй вход которого соединен с выходом гетеродина 22, усилитель 24 промежуточной частоты, удвоитель 26 фазы, второй анализатор 27 спектра, блок 28 сравнения, второй вход которого через первый анализатор 25 спектра соединен с выходом усилителя 24 промежуточной частоты, ключ 29, второй вход которого соединен с выходом усилителя 24 промежуточной частоты, фазовой детектор 32 и блок 49 регистрации. К выходу удвоителя 26 фазы последовательно подключены делитель 30 фазы на два, узкополосный фильтр 31, частотный детектор 57, триггер 58 и двойной балансный переключатель 59, второй вход которого соединен с выходом узкополосного фильтра 31, а выход подключен к второму входу фазового детектора 32. К входу фазового манипулятора 3 последовательно подключены блок 55 регулируемой задержки, перемножитель 52, второй вход которого соединен с выходом усилителя 17 высокой частоты, фильтр 53 нижних частот, экстремальный регулятор 54, блок 55 регулируемой задержки и указатель 56 дальности. Перемножитель 52, фильтр 53 нижних частот, экстремальный регулятор 54 и блок 55 регулируемой задержки образуют коррелятор 51.
Каждый пеленгационный канал состоит из последовательно включенных приемной антенны 13 (14, 15, 16), усилителя 18 (19, 20, 21) высокой частоты, перемножителя 33 (34, 35, 36), второй вход которого соединен с выходом ключа 29, узкополосного фильтра 37 (38, 39, 40) и фазометра 41 (42, 43, 44). Выходы фазометров 41 и 42 (43 и 44) через вычитатель 45 (46) и сумматор 47 (48) подключены к соответствующим входам блока 49 регистрации.
Приемоответчик представляет собой встречно-штыревой преобразователь (Вшп) поверхностных акустических волн (ПАВ), который содержит две гребенчатые системы электродов 8, шины 9 и 10, которые соединяют электроды каждой из гребенок между собой. Шины в свою очередь связаны с микрополосковой приемопередающей антенной 7. Электроды 8, шины 9, 10, отражатели 11 и микрополосковая антенна 7 нанесены на поверхность пьезокристалла 6.
Предлагаемый способ реализуется следующим образом.
Все люди риска снабжаются пассивными приемоответчиками, которые могут быть выполнены в виде брелков, колец или медальонов.
Передатчик сканирующего устройства формирует сигнал запроса (зондирующий сигнал). С этой целью задающий генератор 1 генерирует высокочастотное колебание
uc(t)=Uc·Cos(wct+φc), 0≤t≤Tc,
которое поступает на первый вход фазового манипулятора 3, на второй вход которого подается модулирующий код M1(t) с выхода генератора 2 модулирующего кода. На выходе фазового манипулятора 3 образуется фазоманипулированный (Фмн) сигнал
u1(t)=Uc·Cos[wct+φк1(t)+φс], 0≤t≤Tc,
где φк1(t)={0,π},
который после усиления в усилителе 4 мощности через дуплексер 50 поступает в приемопередающую 12 антенну, излучается ею в эфир, улавливается микрополосковой приемопередающей антенной 7 приемоответчика. Затем Фмн-сигнал u1(t) преобразуется в акустическую волну, которая распространяется по поверхности пьезокристалла 6, отражается от отражателей 11 и опять преобразуется в электромагнитный сигнал с фазовой манипуляцией
u2(t)=U2·Cos[wct+φк2(t)+φс], 0≤t≤Tc,
где φк2(t)={0, π}, φк2(t)=φк1(t)+φк(t).
При этом внутренняя структура φк(t) сформированного Фмн-сигнала определяется топологией встречно-штыревого преобразователя, имеет индивидуальный характер и содержит всю необходимую уникальную информацию о владельце, например фамилия, имя, отчество, год рождения и т.п.
Сформированный Фмн-сигнал u2(t) излучается микрополосковой антенной 7 в эфир и улавливается приемными антеннами 12-16 сканирующего устройства:
u3(t)=U3·Cos[(wc±Δw)t+φк2(t)+φ1],
u4(t)=U4·Cos[(wc±Δw)t+φк2(t)+φ2],
u5(t)=U5·Cos[(wc±Δw)t+φк2(t)+φ3],
u6(t)=U6·Cos[(wc±Δw)t+φк2(t)+φ4],
u7(t)=U7·Cos[(wc±Δw)t+φк2(t)+φ5], 0≤t≤Tc,
где ±Δw - нестабильность несущей частоты, вызванная различными факторами, в том числе и эффектом Доплера.
Причем приемные антенны 12-16 располагаются в виде геометрического прямого угла, в вершине которого помещают приемопередающую антенну 12 измерительного канала, общую для приемных антенн четырех пеленгационных каналов, расположенных в азимутальной и угломестной плоскостях, но по две на каждую плоскость.
Сканирующее устройство может быть установлено на транспортном средстве, вертолете, самолете или космическом аппарате.
Напряжение u3(t) с выхода приемопередающей антенны 12 через дуплексер 50 и усилитель 17 высокой частоты поступает на первый вход смесителя 23, на второй вход которого подается напряжение гетеродина 22
uг(t)=Uг·Cos(wгt+φг).
На выходе смесителя 23 образуются напряжения комбинационных частот. Усилителем 24 выделяется напряжение промежуточной (разностной) частоты (фиг.4б)
uпр(t)=Uпр·Cos[(wпр±Δw)t+φк2(t)+φпр], 0≤t≤Тс,
где Uпр=1/2U3·Uг;
Wпр=Wc-Wг - промежуточная (разностная) частота;
φпр=φс-фг,
φк2(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M2(t) (фиг.4а), причем φк2(t)=const при кτэ<t<(к+1) τэ и может изменяться скачком при t=кτэ, т.е. на границах между элементарными посылками (к=1, 2, …, N);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс (Тс=N·τэ);
M2(t)=M1(t)+М(t), M(t) - модулирующий код, который определяется топологией встречно-штыревого преобразователя.
Это напряжение поступает на вход удвоителя 26 фазы, на выходе которого образуется гармоническое напряжение (фиг.4в)
u8(t)=U8·Cos[2(wпр±Δw)t+2φпр], 0≤t≤Tc,
где U8=1/2Uпр 2,
в котором фазовая манипуляция уже отсутствует [2φк2(t)={0,2 π}].
Ширина спектра Δfc сложного Фмн-сигнала определяется длительностью τэ его элементарных посылок (Δfc=1/τэ). Тогда как ширина Δf2 его второй гармоники определяется длительностью сигнала Tc (Δf2=1/Tс). Следовательно, при умножении фазы на два широкополосного Фмн-сигнала его спектр сворачивается в N раз 
Это обстоятельство позволяет обнаружить и отселектировать широкополосный Фмн-сигнал среди других сигналов и помех.
Ширина спектра широкополосного Фмн-сигнала измеряется с помощью анализатора 25 спектра, а ширина спектра Δf2 его второй гармоники измеряется с помощью анализатора 27 спектра.
Напряжения U0 и U2, пропорциональные Δfc и Δf2 соответственно, с выходов анализаторов 25 и 27 спектра поступают на два входа блока 28 сравнения.
Если два входа блока 28 сравнения поступают приблизительно одинаковые по интенсивности напряжения, то на его выходе напряжение отсутствует. Если на два выхода блока 28 сравнения поступают разные по интенсивности напряжения, то на его выходе формируется постоянное напряжение.
Так как U0>>U2, то на выходе блока 28 сравнения формируется постоянное напряжение, которое поступает на управляющий вход ключа 29, открывая его. В исходном состоянии ключ 29 всегда закрыт.
При этом Фмн-сигнал uпр(t) (фиг.4б) на промежуточной частоте через открытый ключ 29 поступает на первый (информационный) вход фазового детектора 32. Напряжение u8(t) (фиг.4в) с выхода удвоителя 26 фазы поступает на вход делителя 30 фазы на два, на выходе которого образуется гармоническое напряжении (фиг.4з)
u9(t)=U9·Cos[(wпр±Δw)t+φпр], 0≤t≤Tc,
которое выделяется узкополосным фильтром 31, используется в качестве опорного напряжения и подается на второй (опорный) вход фазового детектора 32. На выходе фазового детектора 32 образуется низкочастотное напряжение (фиг.4и)
uн(t)=Uн·Cosφк2(t), 0≤t≤Tc,
где Uн=1/2Uпр·U9,
которое фиксируется блоком 49 регистрации. В низкочастотном напряжении uн(t), которое пропорционально модулирующему коду М2(t), содержатся паспортные данные о потерпевшем бедствие.
Однако указанная информация может искажаться из-за явления «обратной работы», которое обусловлено скачкообразными переходами фазы опорного напряжения из одного состояния φпр в другое φпр+π под воздействием помех, кратковременного прекращения приема и других дестабилизирующих факторов. Эти переходы за время приема Фмн-сигнала происходят в случайные моменты времени, например, t1, t2, t3, t4 (фиг.4г). При этом на выходе фазового детектора 32 выделяется искаженный аналог модулирующего кода uн 1 (t) (фиг.4д), который не позволяет достоверно определять идентификационный номер терпящего бедствие.
Полученное гармоническое колебание u9 1 (t) (фиг.4г) из-за явления обратной работы имеет неустойчивую фазу. Это колебание поступает на первый вход двойного балансного переключателя 59 и на вход частотного детектора 57. При скачкообразном изменении фазы опорного напряжения на +π, например, в моменты времен t1 и t3 (фиг.4г), на выходе частотного детектора 57 появляются короткие положительные импульсы, а при скачке фазы на - π в момент времени t2 и t4 (возвращение фазы опорного напряжения в первоначальное положение) - отрицательные короткие импульсы (фиг.4е), знакопередающие импульсы с выхода частотного детектора 57 управляют работой триггера 58, выходное напряжение которого (фиг.4ж), в свою очередь, управляет работой двойного балансного переключателя 59.
В устойчивом состоянии, когда фаза опорного напряжения u9 1 (t) совпадает, например, с нулевой фазой принимаемого Фмн-сигнала (фиг.4б), на выходе триггера 58 образуется отрицательное напряжение (фиг.4ж) и двойной балансный переключатель 59 находится в своем первоначальном положении, при котором опорное напряжение u9 1 (t) (фиг.4г) поступает на второй (опорный) вход фазового детектора 32 без изменения.
При скачкообразном изменении фазы опорного напряжения на +π триггер 58 в моменты времени, например, t1 и t3 положительными короткими импульсами с выхода частотного детектора 57 переводится в другое устойчивое состояние. При этом входное напряжение триггера 58 в моменты времени t1 и t3 становится и остается положительным до очередного скачка фазы опорного напряжения в момент времени t2 и t4, которые возвращают фазу опорного напряжения в первоначальное состояние, положительное выходное напряжение триггера 58 (фиг.4ж) переводит переключатель 59 в другое устойчивое состояние, при котором опорное напряжение u9 1 (t) (фиг.4г) с выхода узкополосного фильтра 31 поступает на опорный вход фазового детектора 32 с изменением фазы -π. Это позволяет устранить нестабильность фазы опорного напряжения u9 1 (t) (фиг.4г), вызванную скачкообразным ее изменением под действием помех и связанную с ней «обратную работу». При этом на опорный вход фазового детектора 32 будет поступать опорное напряжение (фиг.4з)
u9(t)=U9·Cos[(wпр±Δw)t+φпр], 0≤t≤Тс,
со стабильной фазой.
Одновременно напряжение u3(t) с выхода усилителя 17 высокой частоты поступает на первый вход перемножителя 52, на второй вход которого подается напряжение u1(t) с выхода фазового манипулятора 3 через блок 55 регулируемой задержки. Полученное на выходе перемножителя 52 напряжение пропускается через фильтр 53 нижних частот, на выходе которого формируется корреляционная функция R(τ), где τ - текущая временная задержка. Экстремальный регулятор 54, предназначенный для поддержания максимального значения корреляционной функции R(τ) и подключенный к выходу фильтра 53 нижних частот, воздействует на блок 55 регулируемой задержки и поддерживает вводимую им задержку τ равной τ3(τ=τ3), что соответствует максимальному значению корреляционной функции R(τ). Указатель 56 дальности, связанный с блоком 55 регулируемой задержки, позволяет непосредственно считывать измеренное значение дальности Д до терпящего бедствие

где С - скорость распространение радиоволны.
Следовательно, задача измерение дальности Д до терпящего бедствие сводится к измерению временной задержки τ3 ретранслированного сигнала относительно запросного (зондирующего).
Напряжение uпр(t) с выхода усилителя 24 промежуточной частоты через открытый ключ 29 одновременно подается на вторые входы перемножителей 33-36, на первые входы которых поступают принимаемые ФМн-сигналы u4(t)-u7(t) с выходов усилителей 18-21 высокой частоты. На выходе пермножителей 33-36 образуются следующие гармонические колебания:
u10(t)=U10·Cos[wгt+φг+Δφ1],
u11(t)=U11·Cos[wгt+φг+Δφ2],
u12(t)=U12·Cos[wгt+φг+Δφ3],
u13(t)=U13·Cos[wгt+φг+Δφ4],
где U10=1/2U4·Uпр; U11=1/2U5·Uпр;
U12=1/2U6·Uпр; U13=1/2U7·Uпр;
Δφ1=φ2-φ1=2πd1/λCosα;
Δφ2=φ3-φ1=2πd2/λCosα;
Δφ3=φ4-φ1=2πd3/λCosβ;
Δφ4=φ5-φ1=2πd4/λCosβ;
где d1, d2, d3, d4 - измерительные базы;
α, β - угловые координаты потерпевшего бедствие (азимут и угол места), которые выделяются узкополосными фильтрами 37-40 и поступают на первые входы фазометров 41-44, на вторые входы которых подается напряжение uг(t) гетеродина 22.
Измеренные сдвиги фаз Δφ1 и Δφ2 с выходов фазометров 41 и 42 поступают на два входа вычитателя 45 и сумматора 47. На выходе вычитателя 45 формируются разность разностей фаз
Δφp1=Δφ2-Δφ1,
эквивалентное измерению фазового сдвига на измерительный базе, длина которой
d5=d2-d1.
Таким образом, выбирая разность баз d5 достаточно малой, можно обеспечить формирование грубой, но однозначной шкалы отсчета азимута α.
На выходе сумматора 47 формируется сумма разностей фаз
ΔφΣ1=Δφ1+Δφ2,
эквивалентное измерению фазового сдвига на измерительной базе, длина которой
d7=d1+d2.
Так формируется точная, но неоднозначная шкала отсчета азимута α.
Измеренные сдвиги фаз Δφ3 и Δφ4 с выходов фазометров 43 и 44 поступают на два входа вычитателя 46 и сумматора 48.
На выходе вычитателя 46 формируется разность разностей фаз
Δφр2=Δφ4-Δφ3,
эквивалентное измерению фазового сдвига на измерительной базе, длина которой
d6=d4-d3.
Таким образом, выбирая разность баз d6 достаточно малой, можно обеспечить формирование грубой, но однозначной шкалы отсчета угла места β.
На выходе сумматора 48 формируется сумма разностей фаз
ΔφΣ2=Δφ3+Δφ4,
эквивалентное измерению фазового сдвига на измерительной базе, длина которой
d8=d3+d4.
Так формируется точная, но неоднозначная шкала отсчета угла места β.
Между сформированными измерительными базами устанавливают следующие неравенства:
Способ обеспечивает не только обнаружение терпящих бедствие, но их пеленгацию, а также дистанционное опознавание терпящих бедствие. Причем пеленгация осуществляется на стабильной частоте гетеродина, способ инвариантен к виду модуляции и нестабильности несущей частоты используемых широкополосных Фмн-сигналов.
С точки зрения обнаружения указанные сигналы обладают высокой энергетической и структурной скрытностью.
Энергетическая скрытность широкополосных Фмн-сигналов обусловлена их высокой сжимаемостью во времени или по спектру при оптимальной обработке, что позволяет снизить мгновенную излучаемую мощность. Вследствие этого широкополосный Фмн-сигнал в точке приема можно оказаться замаскирован шумами и помехами. Причем энергия широкополосного Фмн-сигнала отнюдь не мала, она просто распределена по частотно - временной области так, что в каждой точке этой области мощности сигнала меньше мощности шумов и помех.
Структурная скрытность широкополосных Фмн-сигналов обусловлена большим разнообразием их форм и значительными диапазонами изменения значений параметров, что затрудняет оптимальную или хотя бы квазиоптимальную обработку широкополосных Фмн-сигналов априорно неизвестной структуры с целью повышения чувствительности приемного устройства.
Широкополосные Фмн-сигналы позволяют применять новый вид селекции - структурную селекцию. Это значит, что появляются новая возможность выделять эти сигналы среди других сигналов и помех, действующих в той же полосе частот и в те же промежутки времени.
Положительным свойством приемоответчика на ПАВ является отсутствие источников питания и малые габариты.
Достоинством способа является также высокая эффективность использования частотного диапазона, так как обнаружение многих терпящих бедствие может быть использован радиоканал одной частоты, например fc=26,945 кГц, выделенной для дистанционной охранной сигнализации.
Кроме того, способ обеспечивает увеличение диапазона однозначного измерения азимута и угла места терпящего бедствие при малой длине грубых измерительных баз. Это достигается формированием грубых и точных шкал косвенным методом.
Таким образом, предлагаемый способ по сравнению с базовым объектом и другими техническими решениями аналогичного назначения обеспечивает не только обнаружение терпящих бедствие, точное и однозначное измерение их угловых координат (азимута и угла места), но и позволяет измерить дальность до них, а следовательно, определить местоположение терпящих бедствие.
Кроме того, предлагаемый способ позволяет устранить явление «обратной работы», обеспечивая тем самым достоверное определение идентификационных номеров терпящих бедствие и их опознание.
Тем самым функциональные возможности известного способа расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2009 |
|
RU2426145C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2012 |
|
RU2514131C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2008 |
|
RU2363614C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2001 |
|
RU2206902C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2009 |
|
RU2423730C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2009 |
|
RU2418714C2 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2010 |
|
RU2448017C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2378138C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 2000 |
|
RU2172968C1 |
Изобретение относится к радиолокационной технике и может найти применение в горноспасательных работах для дистанционного обнаружения жертв аварий, поиска заблудившихся и потерявшихся в лесу, терпящих бедствие в морских условиях рыбаков, особенно при плохой видимости, для поиска туристов, геологов, а также для дистанционного обнаружения пострадавших при чрезвычайных и иных обстоятельствах (несчастные случаи, боевые действия, катастрофы, стихийные бедствия, природные катаклизмы и т.д.). Согласно изобретению система содержит сканирующее устройство и приемоответчик, размещенный на терпящем бедствие. Сканирующее устройство содержит задающий генератор (1), генератор (2) модулирующего кода, фазовый манипулятор (3), усилитель (4) мощности, приемные антенны (12), (13), (14), (15), (16), усилитель (24) промежуточной частоты, анализаторы (25) и (27) спектра, удвоитель (26) фазы, блок (28) сравнения, ключ (29), делитель (30) фазы на два, узкополосный фильтр (31), фазовый детектор (32), перемножители (33)-(36), узкополосные фильтры (37)-(40), фазометры (41)-(44), вычитатели (45) и (46), сумматоры (47) и (48), блок (49) регистрации, дуплексер (50), коррелятор (51), перемножитель (52), фильтр (53) нижних частот, экстремальный регулятор (54), блок (55) регулируемой задержки, указатель (56) дальности, частотный детектор (57), триггер (58) и двойной балансный переключатель (59), Приемоответчик содержит пьезокристалл (6), микрополосковую приемопередающую антенну (7), электроды (8) шины (9) и (10), отражатели (11). Техническим результатом является расширение функциональных возможностей известного способа путем определения дальности до потерявшего бедствие, а следовательно, и его местоположение, а также повышение достоверности определения идентификационного номера потерпевшего бедствие путем устранения явления «обратной работы». 4 ил.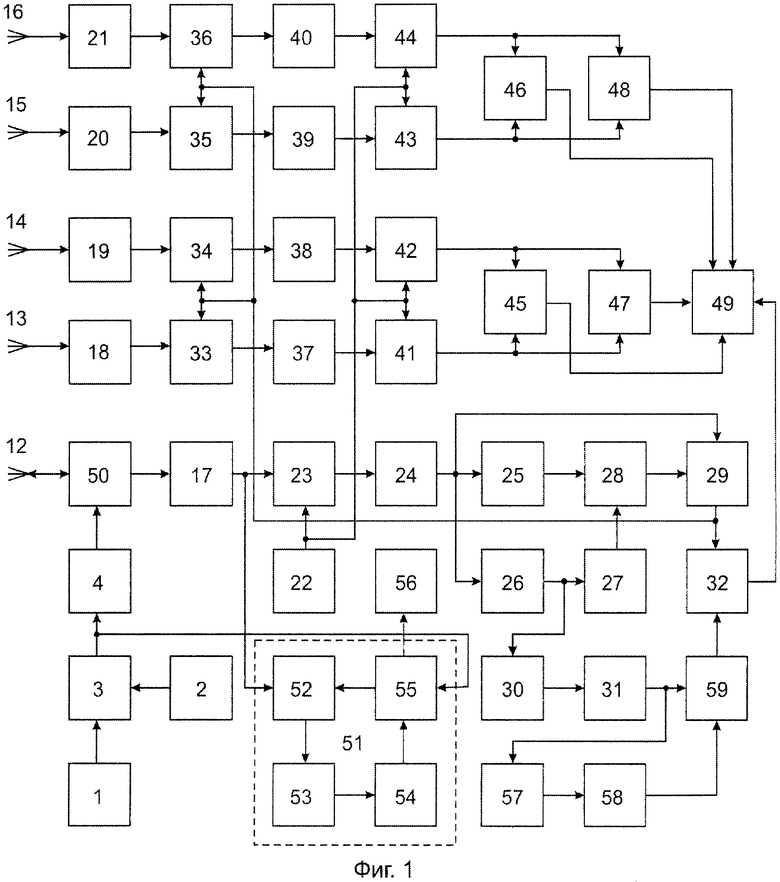
Способ обнаружения терпящих бедствие, заключающийся в излучении сигнала, приема переизлученного приемоответчиком, размещенным на терпящем бедствие, сигнала в заданной полосе приема Δfпр с последующим его обнаружением, при этом в качестве зондирующего сигнала, излучаемого передатчиком сканирующего устройства, используют широкополосный сигнал с фазовой манипуляцией, а в качестве приемоответчика используют линию задержки на поверхностных акустических волнах и интегрированную с ней микрополосковую приемопередающую антенну, принимаемый приемником сканирующего устройства, содержащим измерительный и четыре пеленгационных канала, широкополосный сигнал с фазовой манипуляцией преобразуют по частоте в измерительном канале, умножают его по фазе на два, измеряют ширину спектра преобразованного по частоте широкополосного сигнала с фазовой манипуляцией и его второй гармоники, сравнивают их между собой и по результатам сравнения разрешают дальнейшую обработку преобразованного по частоте широкополосного сигнала с фазовой манипуляцией, делят фазу второй гармоники на два, выделяют полученное гармоническое напряжение узкополосным фильтром и используют его в качестве опорного напряжения для синхронного детектирования преобразованного по частоте широкополосного сигнала с фазовой манипуляцией, одновременно преобразованный по частоте широкополосный сигнал с фазовой манипуляций перемножают с принимаемыми в четырех пеленгационных каналах широкополосными сигналами с фазовой манипуляцией, выделяют гармонические сигналы на частоте гетеродина, измеряют между ними и напряжением гетеродина фазовые сдвиги:
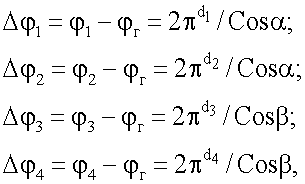
где d1, d2, d3, d4 - измерительные базы;
λ - длина волны;
α, β - азимут и угол места,
в каждой плоскости формируют две измерительные базы d1 и d2, d3 и d4, определяют разности разностей фаз:
Δφp1=Δφ2-Δφ1, Δφр2=Δφ4-Δφ3,
эквивалентные измерению фазовых сдвигов на измерительных базах, длина которых:
d5=d2-d1, d6=d4-d3, формируют с использованием разности разностей фаз грубые, но однозначные шкалы отсчета углов α и β, соответствующие малым измерительным базам d5 и d6, определяют сумму разностей фаз:
ΔφΣ1=Δφ1+Δφ2, ΔφΣ2=Δφ3+Δφ4,
эквивалентные измерению фазовых сдвигов на измерительных базах,
длина которых:
d7=d1+d2, d8=d3+d4,
формируют с использованием суммы разностей фаз точные, но неоднозначные шкалы отсчета углов α и β, соответствующие большим измерительным базам d7 и d8, приемные антенны измерительного и пеленгационных каналов размещают в виде геометрического прямого угла, в вершине которого помещают антенну измерительного канала, отличающийся тем, что передающую антенну передатчика и приемную антенну измерительного канала приемника сканирующего устройства объединяют и используют как одну приемопередающую антенну, которую связывают с передатчиком и приемником через дуплексер, зондирующий сложный сигнал с фазовой манипуляцией передатчика пропускают через блок регенерируемой задержкой, перемножают его с ретранслированным сложным сигналом с фазовой манипуляцией измерительного канала приемника, выделяют низкочастотное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию R(τ) на максимальном уровне, фиксируют временную задержку τ3 между зондирующим и ретранслированным сигналами и по ее значению определяют дальность до приемоответчика, размещенного на терпящем бедствие, определяют моменты скачкообразного изменения фазы опорного напряжения под воздействием различных дестабилизирующих факторов, возвращают фазу опорного напряжения в исходное состояние, стабилизируя тем самым фазу опорного напряжения и устраняя явления «обратной работы».
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2007 |
|
RU2346290C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2001 |
|
RU2206902C1 |
| Передача с мальтийским крестом | 1947 |
|
SU75199A1 |
| US 4646090 A, 24.02.1987. | |||

