Изобретения относятся к строительной технике и предназначены для обнаружения устройств ударного действия - пробойников, применяемых для пробивания скважин.
Известен способ определения местоположения пробойника с помощью обнаружения искрового генератора, расположенного на пробойнике или рядом с ним, минимум двумя антеннами, расположенными на поверхности земли, по максимуму сигнала. Известный способ реализуется с помощью устройства, содержащего закрепленную рядом с пробойником динамомашину с приводом от турбины, прерыватель, трансформатор, разрядник, две приемных антенны, приемное устройство и индикатор. [Патент N2009298, Е 02 F 5/18 - Буданов Г.И., Ткач Х.Б., Костылев А. Д. , Трубицын В.В. - Способ обнаружения пневмопробойника в грунте и устройство для его реализации].
В известном способе и устройстве динамомашина, приводимая во вращение турбиной, работающей от сжатого воздуха, вырабатывает высоковольтное напряжение, прерыватель, сидящий на общем валу с турбиной, периодически размыкает входную цепь трансформатора, соединяющую его с динамомашиной, в выходной цепи трансформатора формируется высоковольтный импульс, пробивающий разрядник. При этом излучается широкополосный радиоимпульс, принимаемый антеннами. Принятые сигналы усиливаются в приемном устройстве и подаются на индикатор.
Недостаток известного способа и устройства состоит в том, что способ не позволяет определить направление движения и тангаж пробойника.
Наиболее близкими к предлагаемому изобретению являются известные способ и устройство для определения местоположения пробойника (патент RU 2132428, МПК 6 Е 02 F 5/18). Способ (фиг.1) заключается в том, что обнаруживают сигнал излучателя 2, расположенного на пробойнике 1 или рядом с ним, с помощью антенн 3, 4, расположенных на поверхности земли, в качестве сигнала излучателя используют вращающееся магнитное поле, причем магнитное поле вращают так, чтобы плоскость вращения вектора магнитного момента Рм излучателя была перпендикулярна оси пробойника, принимают сигналы в ближней зоне, где преобладает реактивная мощность поля, находят положение этой плоскости в пространстве с помощью направленных свойств антенн 3, 4 и по ее ориентации определяют направление оси пробойника, а также с помощью минимум двух отсчетов определяют параметры вектора градиента поля и по направлению вектора градиента определяют направление на излучатель, а по модулю градиента и кубической зависимости напряженности поля от расстояния определяют дальность до излучателя.
Наиболее близкое к предлагаемому устройство для определения местоположения пробойника 1 (фиг.1) содержит излучатель 2 электромагнитных колебаний, расположенный на пробойнике или рядом с ним, две направленные антенны 3, 4, приемное устройство 5, вычислитель 6 и индикатор 7, расположенные на поверхности, при этом выходы приемного устройства подключены к входам вычислителя, а его выход подключен к индикатору, приемные антенны, выходы которых подключены к входам приемника, закреплены на общей базе на расстоянии d так, чтобы плоскости нулей их диаграмм направленности совпадали, а база выполнена с возможностью переноса. В качестве излучателя используют генератор вращающегося магнитного поля.
К недостатку наиболее близкого способа и устройства следует отнести сравнительно низкую точность определения направления на пробойник из-за того, что изменение модуля градиента поля при малых углах отклонения от истинного направления на излучатель стремится к нулю.
Таким образом, решаемой задачей (техническим результатом) является повышение точности определения местоположения, курса и тангажа пробойника.
Поставленная задача решается тем, что в способе обнаружения пробойника, согласно которому с помощью расположенного на пробойнике или рядом с ним излучателя возбуждают вращающееся магнитное поле, поле вращают так, чтобы плоскость вращения вектора магнитного момента излучателя была перпендикулярна к оси пробойника, находят положение этой плоскости в пространстве с помощью направленных свойств антенн, расположенных на поверхности земли, согласно изобретению дополнительно определяют по крайней мере две плоскости, разнесенные в пространстве над пробойником. Каждую из плоскостей определяют по трем точкам, в которых относительные запаздывания между сигналами одинаково ориентированных антенн, располагаемых в этих точках, равны нулю. Находят линию пересечения этих плоскостей, а затем находят точку пересечения этой линии с известной плоскостью вращения магнитного момента излучателя. При этом линия пересечения плоскостей с нулевым запаздыванием сигналов совпадает с осью пробойника, а точка пересечения этой линии с плоскостью вращения вектора магнитного момента совпадает с центром излучателя. Таким образом уточняют местоположение, курс и тангаж пробойника.
Поставленная задача решается также тем, что в пространстве над пробойником определяют единственную вертикальную плоскость с нулевым относительным запаздыванием сигналов, наведенных вращающимся магнитным полем в антеннах, располагаемых в этой плоскости. Для определения этой плоскости базу с закрепленными на ней одинаково ориентированными антеннами располагают вертикально и, перемещая базу в пространстве над пробойником, находят две точки на поверхности, в которых запаздывание сигнала между антеннами равно нулю. Линия, проведенная через эти точки, является линией пересечения найденной плоскости с горизонтальной поверхностью и совпадает с курсом пробойника.
Поставленная задача решается также тем, что в устройство для определения местоположения пробойника, содержащее излучатель вращающегося магнитного поля, расположенный на пробойнике или рядом с ним, по крайней мере две одинаково ориентированные антенны, двухканальное, по крайней мере, приемное устройство, вычислитель и индикатор, расположенные на поверхности, выходы антенн подключены к входам каналов приемного устройства, выходы которых подключены к входам вычислителя, а его выход подключен к входу индикатора, согласно изобретению дополнительно введены измеритель запаздывания и второй индикатор, входы измерителя запаздывания подключены к выходам каналов приемного устройства, выход измерителя запаздывания подключен к входу второго индикатора.
Изобретение иллюстрируется чертежами:
на фиг.1 изображено устройство, реализующее способ-прототип;
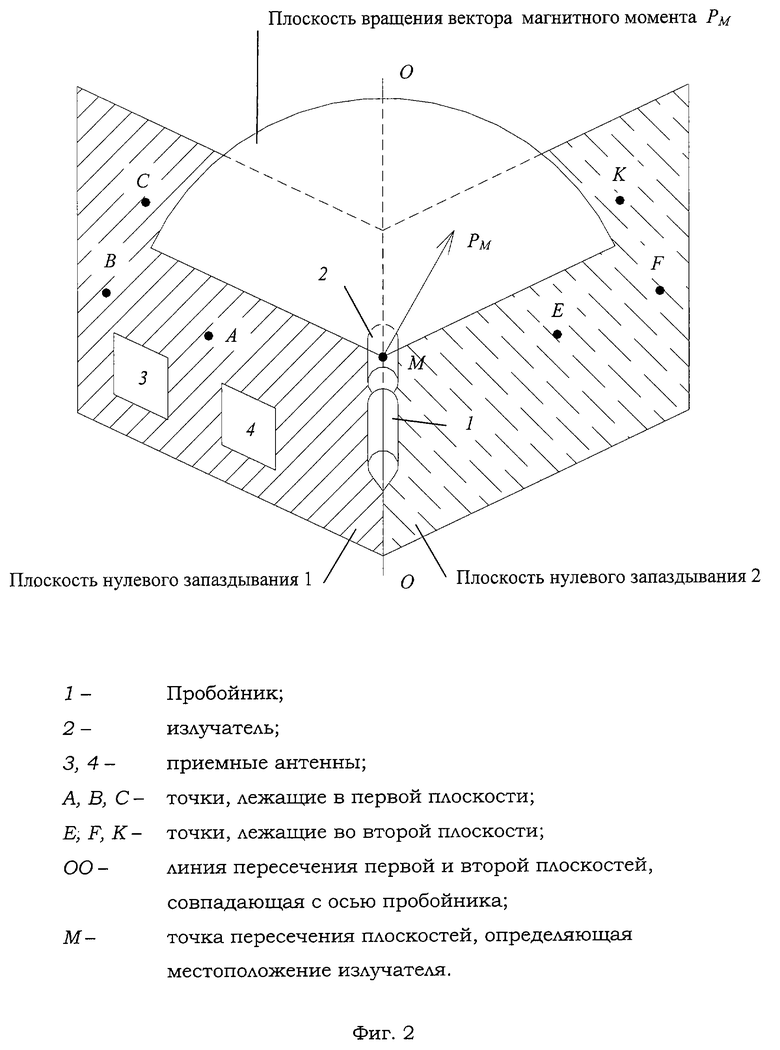
на фиг.2 схематично показан принцип нахождения плоскостей нулевого запаздывания и определения оси пробойника и места его расположения;
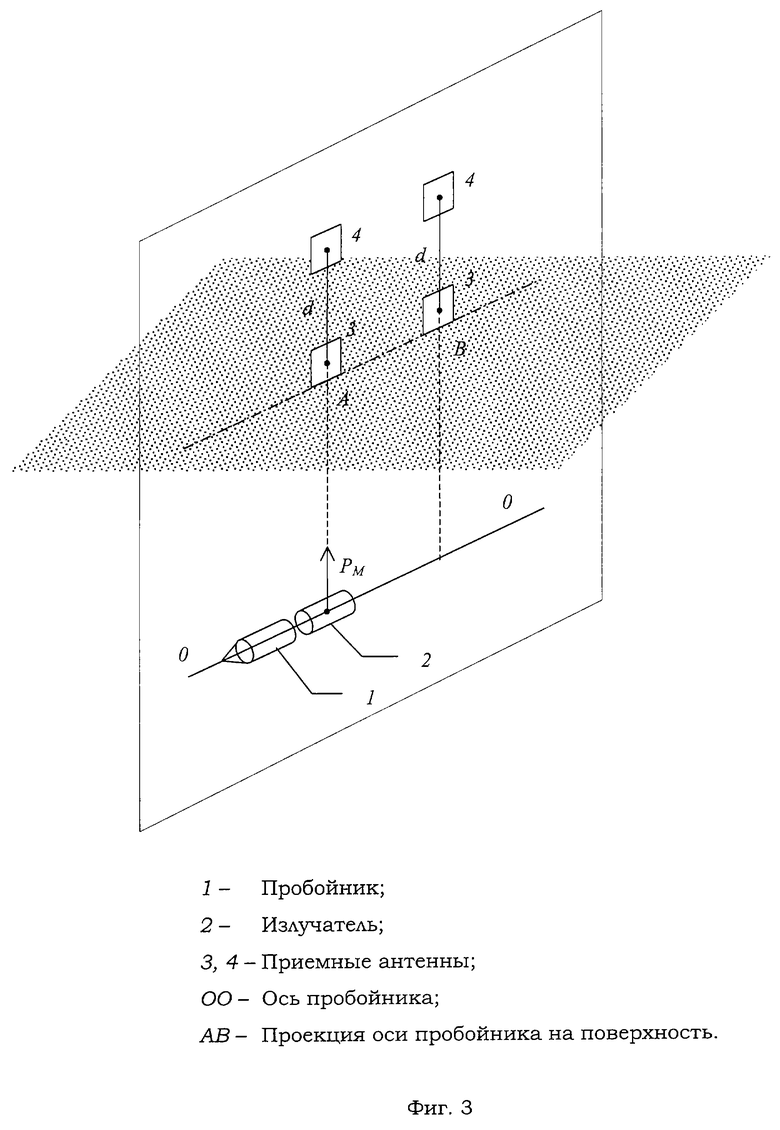
на фиг. 3 показан способ уточнения курса по плоскости нулевого запаздывания сигналов;
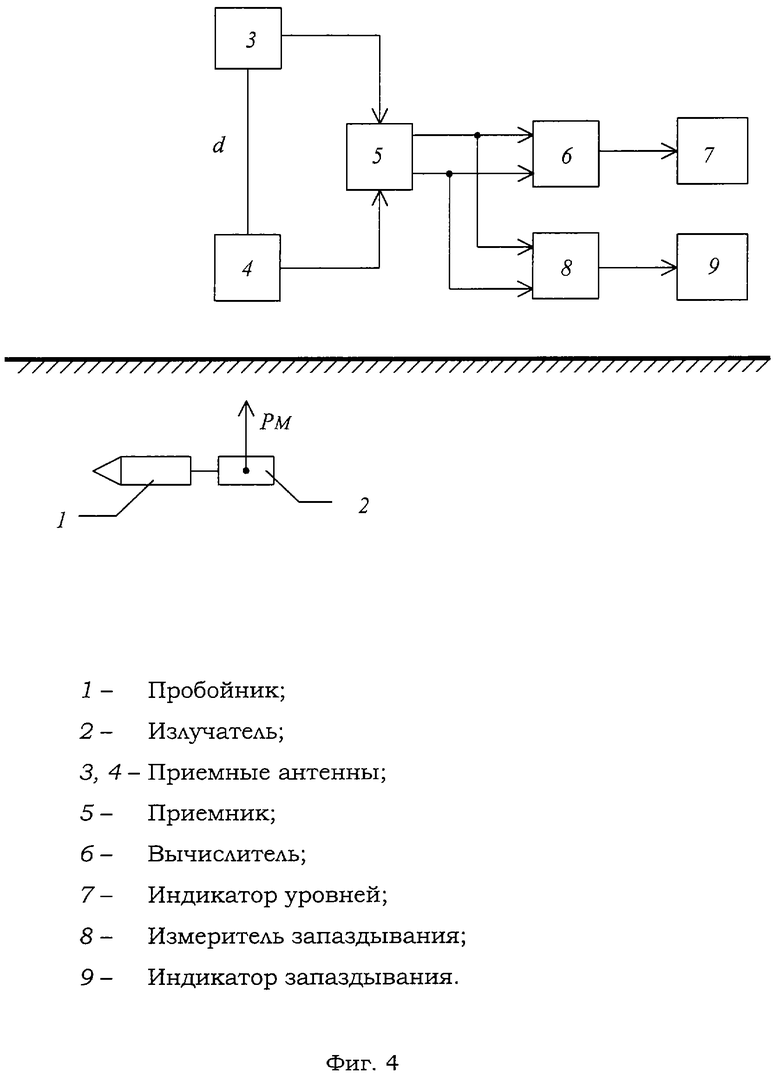
на фиг.4 изображено устройство, реализующее предложенный способ.
Рассмотрим реализуемость способа и устройства на конкретном примере.
В предлагаемом способе для уточнения местоположения, курса и тангажа пробойника используется вращающееся магнитное поле, излучатель которого расположен на пробойнике 1 или рядом с ним (фиг.2). Возьмем плоскость, в которой лежат вектор магнитного момента Рм и ось пробойника. Так как вектор магнитного момента вращается вокруг оси пробойника, то и плоскость вместе с лежащими на ней силовыми линиями будет вращаться. В моменты пересечения плоскостью антенн 3, 4 (фиг.2) в них будут наводиться максимумы сигналов. Запаздывание максимумов этих сигналов будет зависеть от пространственного расположения антенн. Всегда можно найти такую плоскость, в которой лежит ось пробойника и обе антенны и в которой запаздывание сигнала в одной антенне относительно сигнала в другой будет равно нулю (плоскость нулевого запаздывания). Чтобы отыскать такую плоскость достаточно зафиксировать положение антенны 3 в точке А (фиг. 2), а антенну 4 последовательно располагать в точках В и С, в которых запаздывание сигнала относительно сигнала в антенне 3 равно нулю. Зафиксировав координаты этих точек, мы однозначно определяем положение первой плоскости нулевого запаздывания. Переместив антенну 3 в точку Е аналогично находим координаты точек F и К, то есть определяем положение второй плоскости нулевого запаздывания, хотя плоскости можно определять одновременно, используя большее количество антенн. Линия пересечения этих плоскостей будет совпадать с осью пробойника, а точка М пересечения этой линии с известной плоскостью вращения магнитного момента совпадает с центром излучателя. Таким образом уточняется местоположение, курс и тангаж пробойника.
Более простой вариант способа уточнения курса с использованием плоскости нулевого запаздывания состоит в следующем.
Одинаково ориентированные антенны 3, 4, закрепляют на базе d, которую располагают вертикально и находят точку А (фиг.3) на поверхности, в которой относительное запаздывание сигналов в антеннах равно нулю. Фиксируют положение этой точки. Затем смещаются относительно нее на некоторое расстояние и, сохраняя вертикальное положение базы, находят точку В, в которой относительное запаздывание сигналов равно нулю. Линия, соединяющая точки А и В, совпадает с проекцией оси пробойника на поверхность, то есть с его курсом.
Повышение точности в предлагаемом способе связано с тем, что все измерения сводятся к нулевым отсчетам, а такие измерения имеют высокую разрешающую способность.
Устройство, реализующее способ определения местоположения пробойника 1 (фиг. 4), содержит излучатель 2, расположенный на пробойнике 1 или рядом с ним, две антенны 3, 4, выходы антенн подключены к входам приемника 5, вычислитель 6 и индикатор уровней 7, измеритель запаздывания 8, входы которого подключены к соответствующим выходам приемника 5, а выход подключен к входу индикатора запаздывания 9.
Устройство работает следующим образом. Сигналы, наведенные в антеннах 3, 4, поступают на входы двухканального приемника 5, усиливаются и поступают соответственно на два входа измерителя запаздывания 8, роль которого может выполнять обычный фазовый детектор. Сигнал с выхода измерителя запаздывания поступает на индикатор величины запаздывания 9. Кроме того, одновременно сигналы с выходов приемника 5 поступают на входы вычислителя 6, измеряющего уровни сигналов и их отношение, а с его выхода на вход индикатора 7.
Таким образом, устройство позволяет дополнительно к уровням сигналов измерять величину запаздывания между сигналами, наведенными вращающимся полем в антеннах 3, 4, и находить плоскости нулевого запаздывания сигналов, по которым проводится уточнение местоположения пробойника согласно предлагаемому способу.
Изобретение относится к строительной технике и предназначено для обнаружения пробойников, применяемых для пробивания скважин в грунте. Технический результат: повышение точности определения местоположения, курса и тангажа пробойника. Сущность изобретения: с помощью расположенного на пробойнике или рядом с ним излучателя возбуждают вращающееся магнитное поле. Поле вращают так, чтобы плоскость вращения вектора магнитного момента излучателя была перпендикулярна оси пробойника. Находят положения этой плоскости в пространстве с помощью направленных свойств антенн, расположенных на поверхности земли. Определяют по крайней мере две плоскости, разнесенные в пространстве над пробойником, в каждой из которых, по крайней мере в трех точках, относительные запаздывания сигналов между одинаково ориентированными антеннами, располагаемыми в этих точках, равны нулю. Находят линию пересечения этих плоскостей, которая совпадает с осью пробойника и определяет его курс и тангаж. Точка пересечения этой линии с определенной ранее плоскостью вращения вектора магнитного момента излучателя определяет его местоположение. Устройство состоит из расположенного на пробойнике или рядом с ним излучателя вращающегося магнитного поля, расположенных на поверхности двух одинаково ориентированных антенн, двухканального приемного устройства, вычислителя, измерителя и двух индикаторов. Выходы антенн подключены соответственно к входам каналов приемного устройства, выходы соответствующих каналов подключены к входам вычислителя, выход которого подключен к входу первого индикатора. Выходы каналов приемного устройства подключены к входам измерителя запаздывания, выход которого подключен к входу второго индикатора. 2 с. и 1 з.п. ф-лы, 4 ил.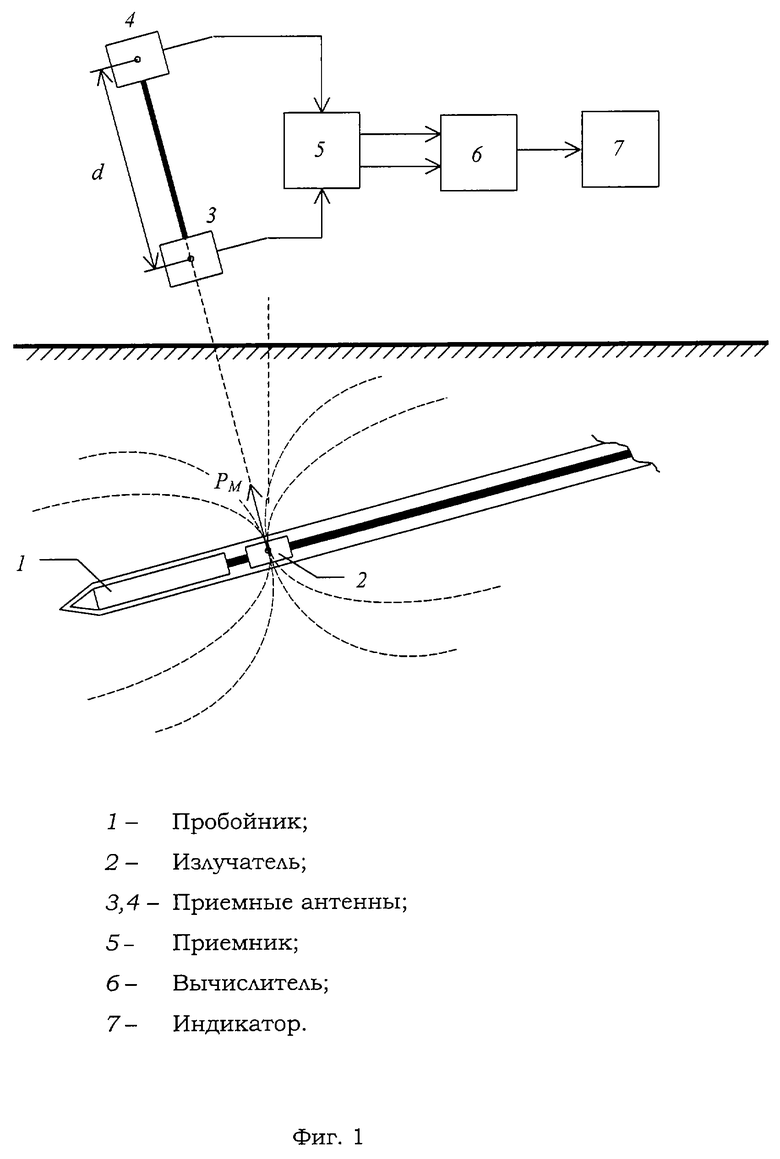
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2132428C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПНЕВМОПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2009298C1 |
| US 6095260, 01.08.2000 | |||
| US 6035951, 14.03.2000. | |||

