Изобретения относятся к строительной технике и предназначены для обнаружения устройств ударного действия - пробойников, применяемых для пробивания скважин.
Известны способ и устройство для определения местоположения пробойника (патент RU №2132428, МПК6 Е 02 F 5/18), заключающийся в том, что обнаруживают сигнал излучателя, расположенного на пробойнике или рядом с ним, с помощью двух антенн, расположенных на поверхности земли, в качестве сигнала излучателя используют вращающееся магнитное поле, причем магнитное поле вращают так, чтобы плоскость вращения вектора магнитного момента РМ излучателя была перпендикулярна оси пробойника, принимают сигналы в ближней зоне, где преобладает реактивная мощность поля, находят положение этой плоскости в пространстве с помощью направленных свойств антенн и по ее ориентации определяют направление оси пробойника, а также с помощью минимум двух отсчетов определяют параметры вектора градиента поля и по направлению вектора градиента определяют направление на излучатель, а по модулю градиента и кубической зависимости напряженности поля от расстояния определяют дальность до излучателя.
Известное устройство для определения местоположения пробойника (патент RU №2132428, МПК6 Е 02 F 5/18) содержит излучатель электромагнитных колебаний, расположенный на пробойнике или рядом с ним, две направленные антенны, приемное устройство, вычислитель и индикатор, расположенные на поверхности, при этом выходы приемного устройства подключены к входам вычислителя, а его выход подключен к индикатору, приемные антенны, выходы которых подключены к входам приемника, закреплены на общей базе на расстоянии d так, чтобы плоскости нулей их диаграмм направленности совпадали, а база выполнена с возможностью переноса. В качестве излучателя используют генератор вращающегося магнитного поля.
К недостаткам известных способа и устройства следует отнести сравнительно низкую точность определения направления на пробойник из-за того, что изменение модуля градиента поля при малых углах отклонения от истинного направления на излучатель стремится к нулю, и отсутствие возможности определения крена. Под креном в данном случае понимается угол поворота пробойника вокруг его продольной оси относительно начального положения, в котором крен принимается равным нулю.
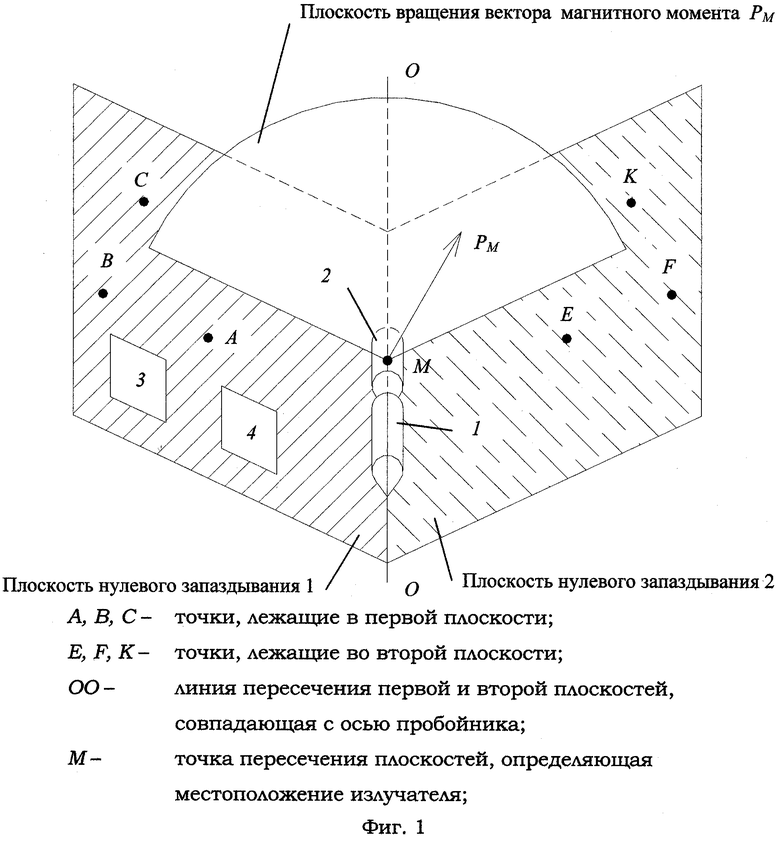
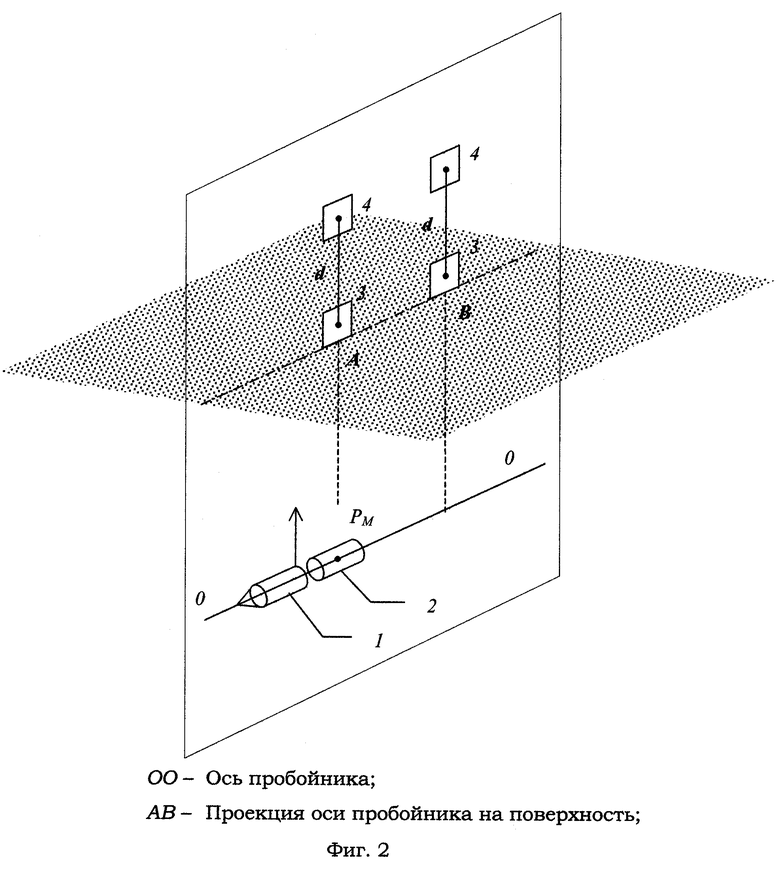
Наиболее близким к предлагаемому изобретению является способ для определения местоположения пробойника в грунте (решение о выдаче патента от 10.01.2003 г. по заявке на изобретение №2002102815/28 от 31.01.2002 г. МПК6 Е 02 F 5/18). По способу (фиг.1), согласно которому с помощью расположенного на пробойнике 1 или рядом с ним излучателя 2 возбуждают вращающееся магнитное поле, поле вращают так, чтобы плоскость вращения вектора магнитного момента излучателя была перпендикулярна к оси пробойника, находят положение этой плоскости в пространстве с помощью направленных свойств антенн 3, 4, расположенных на поверхности земли, определяют по крайней мере еще две плоскости, разнесенные в пространстве над пробойником. Каждую из плоскостей определяют по трем точкам, в которых относительные запаздывания между сигналами одинаково ориентированных антенн, располагаемых в этих точках, равны нулю. Находят линию пересечения этих плоскостей, а затем находят точку пересечения этой линии с известной плоскостью вращения магнитного момента излучателя. При этом линия пересечения плоскостей с нулевым запаздыванием сигналов совпадает с осью пробойника, а точка пересечения этой линии с плоскостью вращения вектора магнитного момента совпадает с центром излучателя. Таким образом определяют местоположение и тангаж пробойника. В пространстве над пробойником 1 (фиг.2) определяют единственную вертикальную плоскость с нулевым относительным запаздыванием сигналов, наведенных вращающимся магнитным полем в антеннах 3, 4, располагаемых в этой плоскости. Для определения этой плоскости одинаково ориентированные антенны 3, 4 располагают на одной вертикали и, синхронно перемещая их в пространстве над пробойником, находят две точки А и В на поверхности, в которых запаздывание сигнала между антеннами равно нулю. Линия, проведенная через эти точки, является линией пересечения найденной плоскости с горизонтальной поверхностью и совпадает с курсом пробойника.
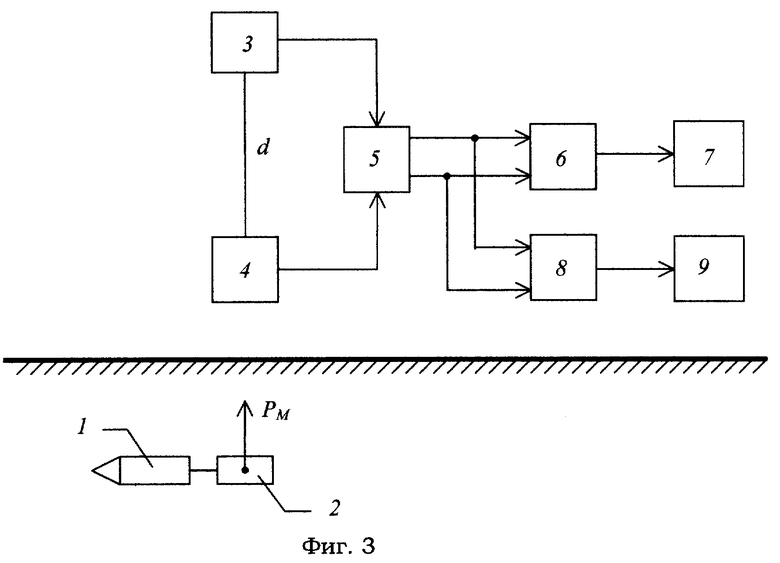
В известном, наиболее близком к предлагаемому изобретению устройстве (решение о выдаче патента от 10.01.2003 г. по заявке на изобретение №2002102815/28 от 31.01.2002 г. МПК6 Е 02 F 5/18) (фиг.3) для определения местоположения пробойника 1, содержащем излучатель вращающегося магнитного поля 2, расположенный на пробойнике или рядом с ним, по крайней мере две одинаково ориентированные антенны 3, 4, двухканальное, по крайней мере, приемное устройство 5, вычислитель 6 и индикатор 7, измеритель запаздывания 8 и индикатор запаздывания 9, расположенные на поверхности, выходы антенн 3, 4 подключены к входам каналов приемного устройства 5, выходы которых подключены к двум входам вычислителя 6 и параллельно к двум входам измерителя запаздывания 8, а их выходы подключены к входам индикаторов 7 и 9.
Недостатком известных наиболее близких к предлагаемому изобретению способа и устройства является отсутствие возможности определения крена пробойника. Знание крена необходимо при управлении направлением движения пробойника.
Таким образом, решаемой задачей (техническим результатом) является определение крена пробойника.
Поставленная задача (технический результат) решается тем, что в способе обнаружения пробойника, согласно которому с помощью связанного с пробойником излучателя возбуждают вращающееся магнитное поле, поле вращают так, чтобы плоскость вращения вектора магнитного момента излучателя была перпендикулярна к оси пробойника, находят положение этой плоскости в пространстве с помощью направленных свойств антенн, расположенных на поверхности земли, определяют по крайней мере две плоскости, разнесенные в пространстве над пробойником. Каждую из плоскостей определяют по трем точкам, в которых относительные запаздывания между сигналами одинаково ориентированных антенн, располагаемых в этих точках, равны нулю. Находят местоположение пробойника как точку пересечения найденных трех плоскостей, располагают над пробойником на одной вертикали две разнесенные одинаково ориентированные антенны и, перемещая их в пространстве над пробойником, находят точку на поверхности, в которой относительное запаздывание сигналов в антеннах равно нулю, начальную фазу вращения вектора магнитного момента жестко связывают с положением пробойника, в котором его крен принимается равным нулю, синхронно вращают разнесенные и расположенные на одной вертикали в найденной точке антенны до получения максимального уровня сигналов в антеннах и в этом положении определяют величину запаздывания сигнала в одной из антенн относительно начальной фазы вращения вектора магнитного момента излучателя, по величине этого запаздывания определяют крен пробойника.
Поставленная задача (технический результат) решается также тем, что относительное запаздывание сигналов в антеннах определяется как разность запаздываний сигналов в каждой антенне, найденных относительно начальной фазы вращения вектора магнитного момента.
Поставленная задача (технический результат) решается также тем, что в устройство для определения местоположения пробойника в грунте, содержащее излучатель вращающегося магнитного поля, связанный с пробойником, по крайней мере две разнесенные одинаково ориентированные антенны, двухканальное, по крайней мере, приемное устройство, вычислитель и индикатор, устройство измерения запаздывания и индикатор запаздывания, расположенные на поверхности, выходы антенн подключены к входам каналов приемного устройства, а их выходы подключены к двум входам вычислителя и параллельно к двум входам измерителя запаздывания, а их выходы подключены к входам индикаторов, согласно изобретению связь излучателя с пробойником выполнена жесткой и дополнительно введены третий вход измерителя запаздывания и блок формирования и передачи начальной фазы, вход блока формирования и передачи начальной фазы подключен к излучателю, а выход соединен с третьим входом измерителя запаздывания.
Изобретение иллюстрируется чертежами:
на фиг.1 и фиг.2 показан способ-прототип;
на фиг.3 изображено устройство, реализующее способ-прототип;
на фиг.4 показан способ определения крена;
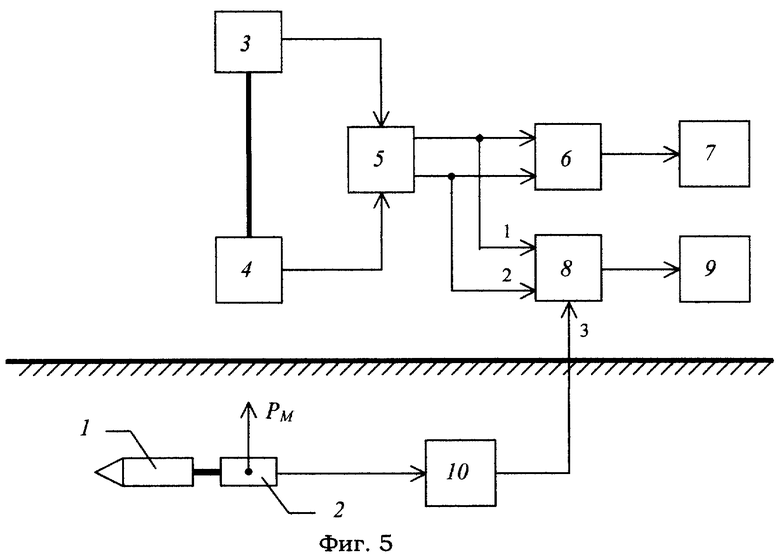
на фиг.5 изображено устройство, реализующее предлагаемый способ.
Рассмотрим реализуемость способа и устройства на конкретном примере.
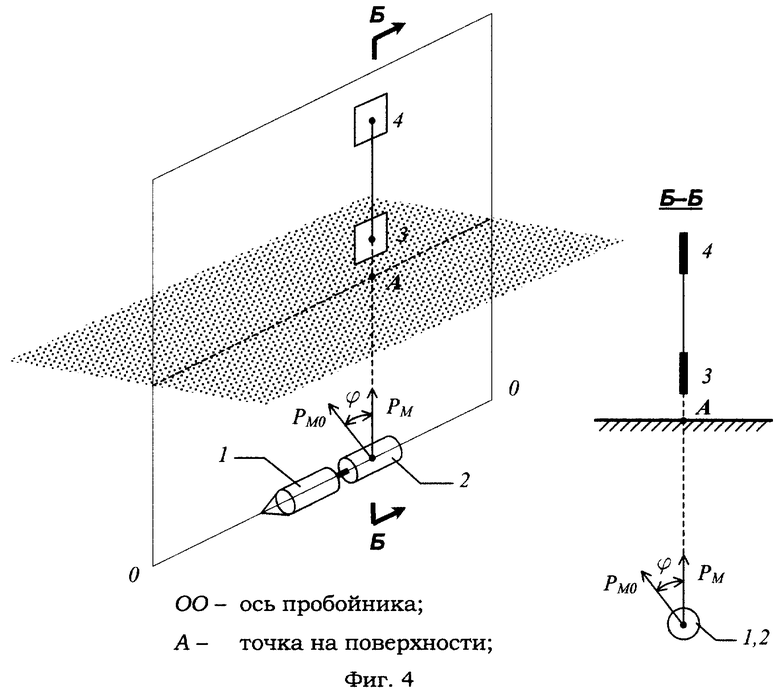
В предлагаемом способе для определения крена пробойника используют вращающееся магнитное поле, излучатель которого жестко связан с пробойником 1 (фиг.4). Возьмем плоскость, в которой лежат вектор магнитного момента РМ и ось пробойника (фиг.4). Так как вектор магнитного момента вращается вокруг оси пробойника, то и плоскость вместе с лежащими на ней силовыми линиями будет вращаться. Начальная фаза вращения вектора магнитного момента РМ соответствует положению вектора РМ0 и жестко связана с положением пробойника, в котором его крен принимается равным нулю. Тогда запаздывание сигналов, наведенных в антеннах 3, 4 относительно положения вектора РМ0, будет однозначно в пределах 360° зависеть от угла ϕ поворота пробойника и жестко связанного с ним излучателя вокруг продольной оси, т.е. от крена пробойника. Начальная фаза сигнала, возбуждающего вращающееся магнитное поле в излучателе 2, жестко связана с начальной фазой вектора вращения вектора магнитного момента, т.е. с положением вектора РМ0, не зависит от крена пробойника и служит в качестве начала отсчета при измерении запаздывания сигналов, наведенных в каждой антенне. При этом относительное запаздывание определяется как разность запаздываний сигналов в антеннах, найденных относительно начальной фазы вращения вектора магнитного момента. Информацию о начальной фазе сигнала, возбуждающего излучатель и жестко связанного с начальной фазой вращения вектора магнитного момента РМ, передают от излучателя с помощью блока формирования и передачи начальной фазы 10.
Определение крена производят следующим образом. Над пробойником 1 (фиг.4) располагают на одной вертикали две одинаково ориентированные разнесенные антенны 3, 4. Синхронно перемещая их в пространстве над пробойником 1, находят точку на поверхности, в которой относительное запаздывание сигналов в антеннах равно нулю. В этом месте антенны синхронно вращают вокруг вертикали до получения максимального уровня сигналов в антеннах. Получение максимального уровня сигнала соответствует такой ориентации антенн относительно силовых линий вращающегося магнитного поля, при которой измеренное запаздывание будет истинным. Далее замеряют запаздывание в одной из антенн и по нему путем пересчета определяют крен пробойника.
Устройство, реализующее предлагаемый способ определения крена пробойника 1 (фиг.5), содержит излучатель 2, связанный с пробойником 1, две антенны 3, 4, выходы антенн подключены к входам приемника 5, вычислитель 6 и индикатор уровней 7, измеритель запаздывания 8 и индикатор запаздывания 9, в него дополнительно, согласно изобретению, введены третий вход измерителя запаздывания 8 и блок формирования и передачи начальной фазы 10, входы антенн подключены к двум входам приемника 5, а его выходы - к двум входам вычислителя 6 и, параллельно, к двум входам измерителя запаздывания 8, выход вычислителя 6 подключен к индикатору 7, а выход измерителя запаздывания - к индикатору запаздывания 9, вход блока 10 подключен к излучателю, а его выход подключен к третьему входу измерителя запаздывания 8.
Устройство работает следующим образом. Сигналы, наведенные в антеннах 3, 4, поступают на входы двухканального приемника 5, усиливаются и поступают соответственно на два входа вычислителя 6, в котором определяются уровни сигналов и их отношение, сигнал с выхода вычислителя 6 поступает на индикатор 7. Одновременно сигнал с выходов приемных каналов приемника 5 поступает на два входа измерителя запаздывания 8, роль которого могут выполнять обычные фазовые детекторы. Сигнал с выхода излучателя 2 поступает на вход блока формирования и передачи начальной фазы 10, а с его выхода - на третий вход измерителя запаздывания 8, где используется в качестве опорного сигнала, сигнал с выхода измерителя запаздывания поступает на индикатор запаздывания 9.
В качестве блока формирования и передачи начальной фазы 10 можно использовать, например, устройство, содержащее модулятор, радиопередатчик с передающей антенной, расположенные на излучателе, приемную антенну, радиоприемник и демодулятор, расположенные на поверхности. При этом вход модулятора связан с излучателем, его выход подключен к входу радиопередатчика, а выход радиопередатчика подключен к антенне. Приемная антенна связана со входом радиоприемника, его выход подключен к входу демодулятора, а выход демодулятора подключен к третьему входу измерителя запаздывания 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2206906C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОБОЙНИКА ИЛИ БУРА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442192C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2132428C1 |
| СПОСОБ ПАССИВНОЙ РАДИОЛОКАЦИИ | 2014 |
|
RU2560089C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2690526C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАСС ПРОКЛАДКИ ПОДВОДНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2386152C1 |
| Измеритель проводимости земной поверхности | 2024 |
|
RU2820896C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ С БЫСТРЫМ ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2014 |
|
RU2561003C1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННАЯ РАДИОМАЯЧНАЯ СИСТЕМА ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2745836C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ФАЗОВЫМ ПЕЛЕНГАТОРОМ НА КОПТЕРЕ | 2024 |
|
RU2841365C1 |
Изобретение относится к строительной технике и предназначено для обнаружения пробойников (П), применяемых для пробивания скважин в грунте. Техническим результатом изобретения является обеспечение определения крена пробойника для управления направлением движения П. Для этого с помощью связанного с П излучателя возбуждают вращающееся магнитное поле. Поле вращают так, чтобы плоскость вращения вектора магнитного момента (ВММ) излучателя была перпендикулярна к оси П. Положение этой плоскости находят в пространстве с помощью направленных свойств антенн, расположенных на поверхности грунта. Затем определяют по крайней мере две плоскости, разнесенные в пространстве над П, в каждой из которых по крайней мере в трех точках относительные запаздывания сигналов между одинаково ориентированными антеннами, располагаемыми в этих точках, равны нулю. Определяют местоположение П как точку пересечения трех найденных плоскостей. Располагают над П на одной вертикали две разнесенные одинаково ориентированные антенны и, перемещая их над П, находят точку, в которой относительное запаздывание сигналов в антеннах равно нулю. Начальную фазу вращения ВММ жестко связывают с положением П, в котором его крен принимается равным нулю. Разнесенные и расположенные на одной вертикали антенны синхронно вращают вокруг вертикали до получения максимального уровня сигнала в антеннах и в этом положении определяют величину запаздывания сигнала в одной из антенн относительно начальной фазы вращения ВММ. По величине запаздывания определяют крен П. Относительные запаздывания сигналов в антеннах определяют как разность запаздываний в каждой антенне. Запаздывания сигналов в каждой антенне определяют относительно начальной фазы вращения ВММ. 2 с. и 1 з.п. ф-лы, 6 ил.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2132428C1 |
| УСТРОЙСТВО для ОБРАЗОВАНИЯ СКВАЖИНШ МЕТОДОМ ПРОКОЛАИ?Л 5 til ИИ;-•-»-•- •''•^'-="-'\, . .,..- ,--rv ;-.;-р:гЛЯ' | 0 |
|
SU378605A1 |
| Стенд для испытания пневматических машин ударного действия | 1977 |
|
SU617542A1 |
| Стенд для исследования устройств ударного действия | 1985 |
|
SU1268675A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПНЕВМОПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2009298C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОДАВЛИВАЕМОГО ТРУБОПРОВОДА | 1993 |
|
RU2049205C1 |
| US 6095260 A, 01.08.2000 | |||
| US 6035951 A, 14.03.2000 | |||
| DE 3306047 A, 23.08.1984. | |||

