Изобретение относится к области авиационной техники, к системам и средствам управления воздушным движением, в частности к пилотажно-навигационному и радиотехническому оборудованию, и предназначено для установки на маневренных летательных аппаратах (ЛА), направлено на повышение точности и безопасности автоматической посадки.
Известна спутниковая система посадки ЛА, включающая взаимодействующие с навигационными спутниками Земли бортовую часть спутниковой навигационной системы (СНС), содержащую бортовую аппаратуру потребителя СНС, систему автоматического управления САУ, подключенную к приборам контроля траектории посадки ЛА, бортовой терминал системы связи, наземную часть СНС, содержащую первую наземную аппаратуру потребителя СНС, установленную в начале взлетно-посадочной полосы (ВПП), подключенный входом к ее выходу наземный вычислитель, контрольно-диспетчерский пункт (КДП), контрольно-корректирующую станцию (ККС), связанная с ним наземная аппаратура линия передачи сигналов (ЛПС) на борту ЛА и подключенная входами к наземному вычислителю, в бортовую часть системы введен бортовой траекторный вычислитель посадки, входы которого подключены к выходам бортового терминала системы связи и бортовой аппаратуры потребителя СНС, а выход его подключен к входу САУ ЛА, в наземную часть СНС введена вторая дополнительная наземная аппаратура потребителя СНС, размещенная в конце ВПП, выход которой подключен к входу наземного вычислителя (см. полезная модель №9651, 1999 г., G 01 S 1/10, Харин Е.Г., Свешников Э.В. и др.).
Однако спутниковая система посадки с использованием ККС в дифференциальном режиме обладает недостаточной точностью, отличается сложной конструкцией, трудно реализуется на аэродромах.
Известна спутниковая система посадки ЛА, включающая на борту ЛА САУ с вычислителем, с датчиками углового и линейного положения ЛА и рулевыми приводами, курсоглиссадный радиоприемник сигналов глиссадного и курсового радиомаяков (ГРМ и КРМ), вычислитель посадки перестраиваемой структуры (ВППС), аппаратуру потребителя СНС, связанную в дифференциальном режиме работы с космической - навигационными спутниками и наземной частью контрольно-корректирующей станции (ККС), первым выходом связана с индикатором летчика, вторым выходом со входом первого и второго компараторов вычислителя ВППС, а третий и четвертый выходы соединены с первыми входами первого и второго блоков деления вычислителя ВППС, вторые входы первого и второго компараторов соединены с выходами источников напряжения сдвига по дальности глиссадного (ГРМ) и курсового (КРМ) радиомаяков, вторые входы первого и второго блоков деления соединены соответственно с входами первого и второго компараторов, выходы первого и второго блоков деления связаны с первым и вторым входами радиоприемника сигналов ГРМ и КРМ, вторые выходы его соединены с входами блоков напряжения сдвига по дальности ГРМ и КРМ, а выходы переключающей матрицы соединены с входом вычислителя САУ (см. свидетельство на полезную модель №21769, 2002 г. Кабачинский В.В. и др.).
Однако данная система с использованием радиомаячных средств в силу своего принципа действия обслуживает узкие сектора пространства, требует достаточно сложной корректировки приема сигналов радиосигнальных зон в зависимости от ввода значений постоянных расстояний смещения радиомаяков на конкретном аэродроме. Точность такой системы недостаточна, т.к. по мере приближения к радиомаяку наступает неустойчивость и САУ нужно отключать.
Наиболее близким к заявленному техническому решению является спутниковая система посадки ЛА, состоящая из спутниковой навигационной системы (СНС), бортовой части ЛА, содержащей бортовую аппаратуру потребителей СНС, скомплексированной с инерциальной навигационной системой ИС, блок формирования траекторных сигналов, вычислитель САУ, выходы которого связаны с сервоприводом поверхностей управления по тангажу и курсу, механически связанных с соответствующими рулевыми приводами, датчики углового положения ЛА, связанные с вычислителем САУ, подключенный к приемнику СНС индикатор летчика, радиовысотомер, компаратор, курсоглиссадный приемник, связанные с ним через радиоканалы глиссадный и курсовой радиомаяки (ГРМ, КРМ), установленные по штатному расположению относительно взлетно-посадочной полосы. Патент РФ №2040434, 1993 г. "Система автоматического управления посадкой самолета", МПК В 64 С 13/18, G 05 D 1/00, авт. Бабушкин С.А. Однако в известной системе посадки используются из СНС навигационные координаты широты и долготы и применяется тангажный закон управления в продольном канале при посадке, что приводит к неоправданному усложнению всей системы. Кроме того, при приближении к радиомаякам растет коэффициент усиления и система становится неустойчивой, в известной системе используют блоки определения возмущений, блоки адаптации, что снижает точность, усложняет систему посадки. Повышает требования по ограничению величин внешних возмущений при посадке на аэродром, что снижает безопасность.
Сущность изобретения
Изобретение направлено на повышение точности и безопасности спутниковой автоматической системы посадки ЛА. Кроме того, позволит улучшить динамические характеристики ЛА системы управления, снизить требования к величине внешних возмущений при посадке на аэродром.
Сущность заявленного технического решения системы автоматической посадки ЛА состоит в том, что в систему автоматической посадки летательных аппаратов, содержащую в бортовой части летательного аппарата бортовую аппаратуру, состоящую из спутниковой навигационной системы СНС, скомплексированной с инерциальной навигационной системой ИС, связанный с бортовой аппаратурой потребителей блок формирования траекторных сигналов для фильтрации и интегрирования составляющих вектора скорости ЛА, вычислитель системы автоматического управления САУ, выходы которого связаны с сервоприводом поверхностей управления по тангажу и курсу, механически связанных с соответствующими рулевыми приводами, датчики углового положения ЛА, связанные с вычислителем САУ, подключенный к приемнику СНС индикатор летчика, радиовысотомер, компаратор, курсоглиссадный приемник КРП, связанные с ним через радиоканалы глиссадный и курсовой радиомаяки (ГРМ, КРМ), установленные по штатному расположению относительно взлетно-посадочной полосы, для достижения указанной цели введены схема комплексирования (фильтрации) линейных траекторных параметров СНС и угловых отклонений от равносигнальных зон радиотехнических средств РТС, содержащая сумматоры и интеграторы, выход которой связан со входом вычислителя САУ, два блока умножения, две схемы НЕ, последовательно соединенные с компаратором, два входа которого соединены с задатчиком высоты 60-70 м и радиовысотомером. При этом первый и второй выходы блока формирования траекторных параметров по отклонениям от глиссады и осевой линии ВПП соединены с входами первых сумматоров схемы комплексирования, третьи выходы по дальности Dгрм и Dкрм ЛА до радиомаяков (ГРМ и КРМ) соединены через блоки умножения с первыми входами интеграторов схемы комплексирования, вторые входы блоков умножения через схемы НЕ подключены к первым двум выходам КРП, вторые выходы которого подключены к первым входам вторых сумматоров схемы комппексирования, соединенных со вторыми входами интеграторов, подключенных ко вторым входам первых сумматоров, выходы которых подключены ко вторым входам вторых сумматоров, выделенные схемой комплексирования траекторные параметры используют для формирования управляющих сигналов посадки ЛА.
Такое выполнение автоматической системы посадки позволит повысить точность при обеспечении безопасности.
Перечень фигур на чертежах.
Изобретение поясняется следующими фигурами:
на фиг.1 изображена функциональная схема автоматической системы посадки ЛА,
на фиг.2, 3 приведены кинематические соотношения движения самолета по траектории посадки.
На фиг.1 изображены
1 - космическая часть спутниковой навигационной системы (СНС) - искусственные спутники земли (ИСЗ)
2 - аппаратура потребителей на борту ЛА
3 - индикатор СНС летчика
4, 5 - сглаживающие электрические фильтры
6 - блок формирования траекторных сигналов
7 - задатчик высоты
12 - интеграторы
8, 9 - блоки умножения
10 - схема комплексирования (фильтрации)
11, 18 - сумматоры
13, 14 - схемы «НЕ»
15 - компаратор
16 - датчики углового положения ЛА
17 - вычислитель САУ
19 - радиовысотомер
20 - электрогидропривод САУ
21 - рулевые поверхности
22 - курсоглиссадный радиоприемник (КРП)
23 - курсовой радиомаяк (КРМ)
24 - глиссадный радиомаяк (ГРМ)
Сведения, подтверждающие возможность осуществления изобретения
Система автоматической посадки ЛА содержит спутниковую навигационную систему 1, в бортовой части ЛА бортовую аппаратуру потребителей (АП) СНС, скомплексированной с инерциальной навигационной системой ИС 2, связанный с бортовой АП блок формирования траекторных сигналов 6, предназначенный для фильтрации и интегрирования составляющих вектора скорости ЛА, поступающих на него с бортовой аппаратуры потребителей, вычислитель системы автоматического управления САУ 17, выходы которого связаны с сервоприводом поверхностей управления по тангажу и курсу 20, механически связанных с соответствующими рулевыми поверхностями 21, датчики углового положения ЛА 16, связанные с вычислителем САУ 17, подключенный к приемнику СНС индикатор летчика 3, радиовысотомер 19, компаратор 15, курсоглиссадный приемник КРП 22, связанные с ним через радиоканалы глиссадный и курсовой радиомаяки (ГРМ 24, КРМ 23), установленные по штатному расположению относительно взлетно-посадочной полосы. Для достижения указанной цели введены схема комплексирования (фильтрации) 10 линейных траекторных параметров СНС и угловых отклонений от равносигнальных зон радиотехнических средств РТС, содержащая сумматоры и интеграторы, выход которой связан со входом вычислителя САУ 17, два блока умножения 8, 9, две схемы НЕ 13, 14, последовательно соединенные с компаратором 15, два входа которого соединены с задатчиком высоты 60-70 м и радиовысотомером 7, 8. При этом первый и второй выходы блока формирования траекторных параметров по отклонениям от глиссады и осевой линии ВПП 6 соединены с входами первых сумматоров 11 схемы комплексирования 10, третьи выходы по дальности Dгрм и Dкрм ЛА до радиомаяков (ГРМ и КРМ) соединены через блоки умножения 8 и 9 с первыми входами интеграторов 12 схемы комплексирования, вторые входы блоков умножения через схемы НЕ 13, 14 подключены к первым двум выходам КРП 22, вторые выходы которого подключены к первым входам сумматоров 18 схемы комплексирования, соединенных со вторыми входами интеграторов, подключенных ко вторым входам сумматоров 11, выходы которых подключены ко вторым входам сумматоров 18, выделенные схемой комплексирования траекторные параметры используют для формирования управляющих сигналов посадки ЛА.
Система работает следующим образом.
Навигационная аппаратура потребителей на борту ЛА СНС и ИС 2 с приемо-индикатором 3 производит выбор рабочего созвездия искусственных спутников Земли (ИСЗ) - 1, поиск и слежение за сигналами, обработку измеренных радионавигационных параметров для определения координат и скорости потребителя ЛА. СНС-2 включает в себя 22 навигационных спутника, которые располагаются таким образом на своих орбитах, что в каждый момент времени в любой точке Земли наблюдается не менее 4-х спутников; прием сигнала от навигационного спутника позволяет определить на ЛА необходимые параметры. Благодаря тому, что спутник по каналу связи сообщает постоянные параметры своей орбиты, на ЛА вычисляются его координаты: широта ϕ, долгота λ, высота Н, составляющие скорости Vx, Vy, Vz и по принимаемому сигналу определяется дальность Dn(t) между ЛА и спутником и  ее изменение.
ее изменение.
При измерении навигационных параметров Dn(t) и  со спутника передается высокочастотный сигнал, модулированный по фазе с помощью временной функции, форма которой заранее известна и на спутнике, и на ЛА. По временному сдвигу между этим сигналом и сигналом со спутника определяется время прохождения радиоволн со спутника к ЛА и расстояние между ними, скорость
со спутника передается высокочастотный сигнал, модулированный по фазе с помощью временной функции, форма которой заранее известна и на спутнике, и на ЛА. По временному сдвигу между этим сигналом и сигналом со спутника определяется время прохождения радиоволн со спутника к ЛА и расстояние между ними, скорость  определяется по доплеровскому сдвигу принимаемого радиосигнала.
определяется по доплеровскому сдвигу принимаемого радиосигнала.
Элементы орбиты спутника, которые с высокой точностью можно считать постоянными, в течение 1-2 час передаются со спутника всем потребителям. По элементам орбиты и бортовому времени вычисляются декартовы координаты Хsn, Ysn, Zsn спутника для любого наперед заданного (текущего) момента времени. А уже по расстояниям до трех спутников, находящихся в известных точках пространства, определяется местоположение ЛА; по значениям скорости изменения дальности до трех спутников вычисляется вектор V земной скорости ЛА.
Спутниковая навигационная система СНС-1-2 включает аппаратуру потребителей - 2 с приемоиндикатором 3, производит выбор рабочего созвездия искусственных спутников Земли (ИСЗ) - 1, поиск и слежение за сигналами, обработку измеряемых радионавигационных параметров для определения координат и составляющих скорости потребителя НСНС, ZСНС. Данные параметры получаются после фильтрации в блоках 4, 5 и интегрирования в блоке формирования траекторных параметров 6 составляющих вектора скорости Vу, Vz, которые далее интегрируют, определяют координаты высоты и бокового отклонения, что упрощает систему посадки.
В рассматриваемой системе ИСЗ-1 получают двоичный фазоманипулированный сигнал, код которого является индивидуальной принадлежностью каждого ИСЗ. Это позволяет всем ИСЗ-1 работать на общей несущей частоте, не создавая заметных внутрисистемных помех. Измеряемыми радионавигационными параметрами служат время запаздывания и доплеровское смещение частоты принимаемого радионавигационного сигнала относительно его образца, формируемого на борту потребителя. Время запаздывания принятого сигнала относительно шкалы времени потребителя включает начальное расхождение шкал времени потребителя и ИСЗ и задержку распространения сигнала на трассе «ИСЗ-потребитель». Если фазы опорных генераторов потребителя и ИСЗ совпадают (расхождение шкал времени равно нулю), то измеряемое время запаздывания пропорционально расстоянию между ИСЗ и потребителем. В противном случае оно пропорционально квазидальности (псевдодальности) и для оценки координат необходимо использовать квазидальномерные или разностно-дальномерные измерения.
В связи с тем, что для определения координат необходимо иметь сведения о местоположении ИСЗ-1 на каждый момент времени, на борту потребителя следует располагать эфемеридной информацией. Для этого на борту ИСЗ дальномерный фазоманипулируемый радионавигационный сигнал подвергается дополнительной фазовой манипуляции на 0 и 180° в соответствии с информационным сообщением, представленным последовательностью нулей и единиц. Выделяемый на борту потребителя информационный сигнал несет сведения о параметрах движения ИСЗ, а дальномерный радионавигационный сигнал - сведения о параметрах движения потребителя относительно ИСЗ.
При расхождении шкал времени Δt=const измеренная квазидальность включает величину сΔt (с - скорость света), поэтому система уравнений принимает вид:

где индекс i соответствует номеру ИСЗ. Для расчета Хп, Yп, Zп и Δt требуется измерить четыре параметра (Di+сΔt, i=1, 2, 3, 4) и решить систему из четырех уравнений.
При квазидальномерных измерениях оценка составляющих вектора скорости потребителя производится по результатам измерения разности частот принятого сигнала и бортового опорного генератора. При высокой стабильности опорных генераторов и достаточно высокой точности установки их номинальных частот изменение Δt за время навигационного сеанса невелико и при нахождении координат потребителя им можно пренебречь. При измерении скорости зависимость Δt от времени существенно влияет на погрешность измерений.
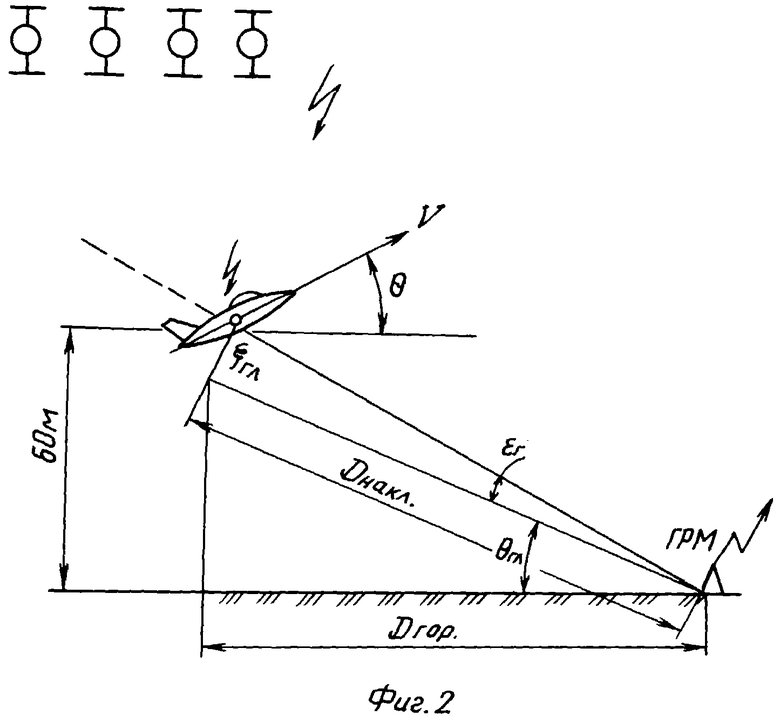
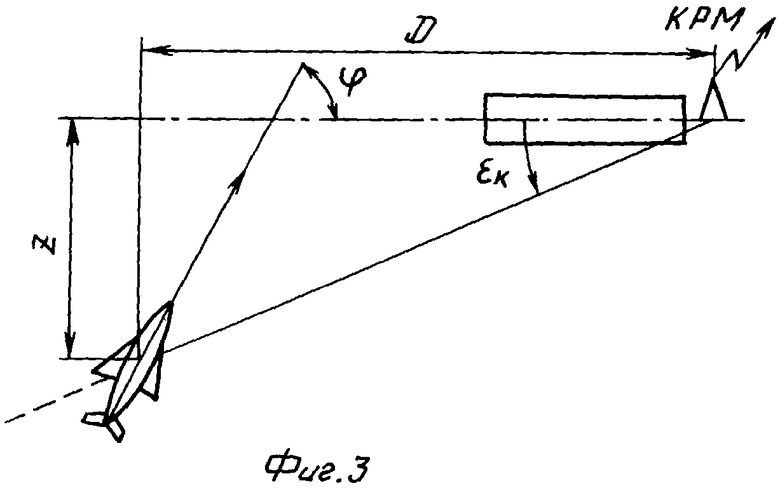
Особенность систем захода на посадку связана с угломерностью радиотехнических средств (РТС) захода на посадку. Формирование закона управления САУ происходит на базе линейного отклонения самолета от равносигнальных зон, несмотря на то, что выходной сигнал РТС пропорционален углу отклонения самолета от этих зон. Это обстоятельство приводит к необходимости иметь на борту самолета дополнительную информацию об изменении дальности до радиомаяка. Связь между угловыми и линейными отклонениями от равносигнальных зон определяется соотношениями для курсового маяка, фиг.2
где εк - угол отклонения ЛА от равносигнальной зоны в горизонтальной плоскости, рад;
для глиссадного маяка, фиг.3
где εг - угол отклонения ЛА от равносигнальной зоны в вертикальной плоскости, рад;
D - проекция горизонтальной дальности самолета от КРМ на ось ВПП;
Z - линейное отклонение ЛА от осевой линии ВПП;
θ0 - угол залегания нулевой линии глиссады;
ξгл - линейное отклонение ЛА от равносигнальной зоны ГРМ;
Н - высота полета ЛА при автоматическом или директорном управлении ЛА в случае его отклонения от равносигнальной зоны КРМ на линейную величину; ξ - крутизна выходного сигнала курсоглиссадного радиоприемника (КРП) на 1-м отклонении будет равна
Кξ=Iкрп/ξ, мкА·рад-1,
где IКРП - выходной сигнал КРП, соответствующий линейному отклонению ЛА от равносигнальной зоны, равному ξ;
Кξ - текущая крутизна сигнала РТС;
ξ - отклонение ЛА от равносигнальной зоны ГРМ.
В случае РТС, измеряющих и выдающих сигнал, пропорциональный линейному отклонению ЛА от равносигнальной зоны, величина этой крутизны остается постоянной на протяжении всего процесса захода на посадку. При использовании информации только об угле отклонения ЛА от равносигнальной зоны курса величина выходного сигнала КРП на единицу линейного отклонения от курсовой зоны с учетом выражения ξк=Z/D может быть представлена как:
где I* КРП выходной сигнал КРП, соответствующий угловому отклонению ЛА от равносигнальной зоны, равному εк;
КРТС - крутизна сигнала угломерных РТС, величина постоянная для данных РТС [мк·рад-1].
Следовательно, в процессе каждого захода ЛА на посадку при использовании информации только от угломерных РТС крутизна выходного сигнала КРП на единицу линейного отклонения будет непрерывно возрастать по мере приближения ЛА к ВПП. Величина текущей дальности, входящей в выражение для параметра εк, можно представить как
 где
где
Do - горизонтальная дальность начала выполнения маневра захода на посадку вдоль оси ВП;
Δψ - угол разворота траектории полета ЛА в горизонтальной плоскости, отсчитанный от курса ВПП.
Или

Тогда

Аналогично для продольного движения имеем
где IГРП - выходной сигнал ГРМ, соответствующий угловому отклонению ЛА от равносигнальной зоны, равному εгл, КРТС - крутизна сигнала угломерных РТС [мкА/рад].
Следовательно, в каждом заходе на посадку по глиссаде снижения при использовании информации только от угломерных РТС крутизна выходного сигнала ГРП на единицу линейного отклонения от равносигнальной зоны будет непрерывно возрастать по мере уменьшения высоты полета ЛА.
DГРМ поступает от ретранслятора ГРМ-24 на радиоприемник сигналов курсоглиссадных зон-22.
Автоматическая посадки ЛА включает измерение линейных траекторных параметров по сигналам спутниковой навигационной системы и угловых параметров радиотехнических систем в связанной системе координат ЛА, формирование сигналов управления выхода ЛА на посадку, отработку заданных командных сигналов от СНС и РТС в системе автоматического управления посадкой ЛА. При этом измеренные СНС линейные траекторные параметры по осям Y, Z, дальность и угловые отклонения от равносигнальных зон РТС комплексируют путем фильтрации, сравнения и интегрирования, корректируют и уточняют средние значения отклонений от глиссады и от осевой линии ВПП параметров СНС по сигналу РТС, из выделенной зависимости траекторных параметров формируют управляющие сигналы посадкой ЛА, затем при выходе ЛА на высоты 70-60 м отключают сигналы (цепи) управления РТС от вычислителя САУ и переводят управление посадкой по сигналам СНС.
Кроме того, формируют управляющие сигналы посадкой ЛА в соответствии с перегрузочным законом управления в продольном канале, определяют вертикальное ускорение и угол крена nузад, γзад по сигналам углового отклонения от траектории.
Жесткость требований к точности движения самолета по равносигнальным зонам радиомаяков 23 и 24 при действии внешних возмущений требует применять в системах автоматического управления астатические законы управления. Независимо от типа сервопривода САУ астатический закон управления формируют на базе интегрального закона, содержащего в своем составе сигнал интеграла отклонения от заданной траектории полета. Однако применение интегральных законов не всегда возможно как по конструктивно-техническим причинам, так и с точки зрения обеспечения требуемой динамики системы «самолет - САУ».
В САУ для управления траекторным движением используется сигнал углового отклонения от заданной траектории, его производная и ряд других параметров ЛА. Алгоритмы формирования управляющих сигналов nузад, γзад по сигналам углового отклонения от траектории следующие:

а в боковом канале по алгоритму:

где К(D)=57,3/D, iεг, iεк, μεг, μεк, Т1, Т2, Т3 - передаточные числа и постоянные времени в продольном и в боковом каналах, D - дальность до соответствующего радиомаяка (ГРМ, КРМ), Н, Z - линейные отклонения от глиссады и оси ВПП.
iH=iεг·К(D) - коэффициент отклонения ЛА от посадочной глиссады по высоте;
iГ=iεг·К(D) - коэффициент отклонения ЛА от осевой линии в угловой зоне;
μH=μεг·К(D) - коэффициент при производной от линейного отклонения ЛА от посадочной глиссады по высоте;
μг=μεг·К(D) - коэффициент при производной от линейного отклонения ЛА от осевой линии в угловой зоне;
ΔН=εг·D - линейное отклонение от посадочной глиссады по высоте, где εГ - коэффициент для перевода угловых зон в линейное отклонение от посадочной глиссады по высоте;
Z=εК·D - линейное отклонение от осевой линии в угловой зоне, εК - коэффициент для перевода угловых зон в линейное отклонение от осевой линии в угловой зоне.
Система автоматической посадки ЛА, выведенного на глиссаду планирования, определяемую глиссадным сигналом, подаваемым радиомаяком ГРМ-24, установленным в створе ВПП, и курсовым радиомаяком КРМ-23, установленным по оси ВПП, воспринимает сигналы курсоглиссадного радиоприемника 22. Система автоматической посадки имеет устройство для постепенного уменьшения коэффициента усиления по мере того, как ЛА приближается к радиомаякам, к земле. На высоте H=60 м по сигналам задатчика высоты 7 и радиовысотомера 19 компаратор 15 отключает в двух схемах НЕ 13 и 14 сигналы радиоприемника 22 εк, εг от СНС2. Корректирование в блоке 10 СНС от РТС прекращается и система автоматической посадки ЛА снова переходит на управление по СНС. САУ ЛА с вычислителем 17 содержит электрогидропривод 20 поверхностей управления 21 по тангажу и курсу, датчики 22 отклонения от глиссады планирования, датчики 16 вертикальной скорости, барометрический датчик вертикальной скорости, датчик вертикальных ускорений, датчик тангажа и угловой скорости тангажа.
Техническая устойчивость системы характеризуется сохранением его во время движения по заданной траектории определенных параметров в заданных пределах. К этим параметрам следует отнести все параметры движения ЛА, имеющие предельные значения (углы атаки, перегрузки, углы крена и т.д.), а также параметры, определяющие качество приземления самолета. Отключение сигналов радиомаяков на высоте 70-60 м и управление по сигналам СНС решает проблему неустойчивости системы, так как ошибка не накапливается по траектории посадки, что повышает устойчивость системы. Заявленная система автоматической посадки обладает повышенной точностью и надежностью, которые достигаются за счет выбранной структуры автоматического управления посадкой всей системы контуров управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2468964C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
Изобретение относится к области авиационной техники и предназначено для установки на маневренных летательных аппаратах (ЛА). Технический результат заключается в повышении точности и безопасности автоматической посадки ЛА. Система автоматической посадки летательного аппарата содержит в бортовой части ЛА бортовую аппаратуру потребителей, состоящую из спутниковой навигационной системы (СНС), скомплексированной с инерциальной навигационной системой (ИС), блок формирования траекторных параметров, вычислитель системы автоматического управления (САУ), выходы которого связаны с электрогидроприводом поверхностей управления по тангажу и курсу, механически связанных с соответствующими рулевыми приводами, датчики углового положения ЛА, связанные с вычислителем САУ. К приемнику СНС подключен индикатор летчика. В систему включены радиовысотомер, компаратор, курсоглиссадный приемник, связанные с ним через радиоканалы глиссадный и курсовой радиомаяки, блок фильтрации линейных траекторных параметров СНС и угловых отклонений от равносигнальных зон радиотехнических средств (РТС), две схемы НЕ, последовательно соединенные с компаратором, два входа которого соединены с задатчиком высоты 70-60 м и радиовысотомером, два блока умножения. 3 ил.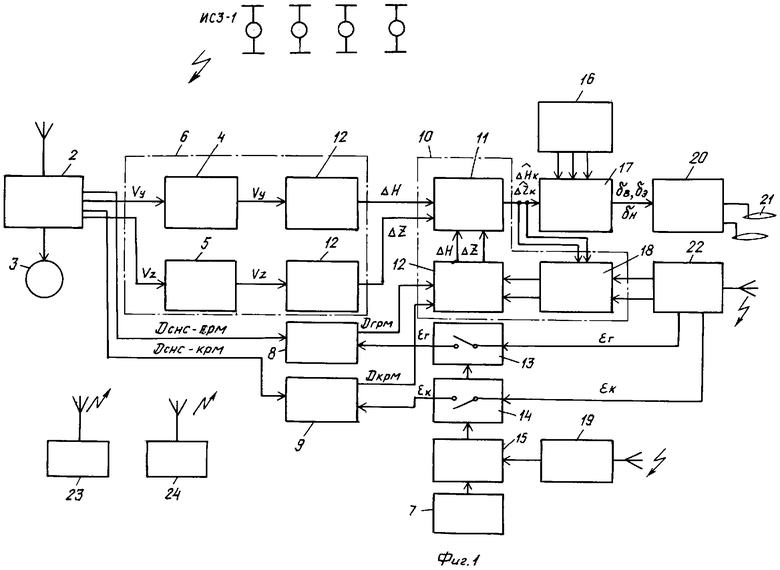
Система автоматической посадки летательных аппаратов, содержащая в бортовой части летательного аппарата (ЛА) бортовую аппаратуру потребителей, состоящую из спутниковой навигационной системы (СНС), скомплексированной с инерциальной навигационной системой (ИС), блок формирования траекторных параметров, предназначенный для фильтрации и интегрирования составляющих вектора ЛА, поступающих на него с бортовой аппаратуры потребителей, вычислитель системы автоматического управления (САУ), выходы которого связаны с сервоприводом поверхностей управления по тангажу и курсу, механически связанных с соответствующими рулевыми приводами, датчики углового положения ЛА, связанные с вычислителем САУ, подключенный к приемнику СНС индикатор летчика, радиовысотомер, компаратор, курсоглиссадный радиоприемник (КРП), связанные с ним через радиоканалы глиссадный и курсовой радиомаяки (ГРМ, КРМ), установленные по штатному расположению относительно взлетно-посадочной полосы (ВПП), отличающаяся тем, что в нее введены блок фильтрации линейных траекторных параметров СНС и угловых отклонений от равносигнальных зон радиотехнических средств (РТС), выполненный на сумматорах и интеграторах, два блока умножения, две схемы НЕ, последовательно соединенные с компаратором, два входа которого соединены с задатчиком высоты 60-70 м и радиовысотомером, при этом первый и второй выходы блока формирования траекторных параметров по отклонениям от глиссады и осевой линии ВПП соединены с входами первых сумматоров блока фильтрации, третьи выходы бортовой аппаратуры потребителей по дальности Dгрм и Dкрм ЛА до радиомаяков ГРМ и КРМ соединены через блоки умножения с первыми входами интеграторов блока фильтрации, вторые входы блоков умножения через схемы НЕ подключены к первым двум выходам КРП, вторые выходы которого подключены к первым входам вторых сумматоров блока фильтрации, соединенных со вторыми входами интеграторов, подключенных ко вторым входам первых сумматоров, выходы которых подключены ко вторым входам вторых сумматоров, выделенные блоком фильтрации траекторные параметры используют для формирования управляющих сигналов посадки ЛА.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОЛЕТА ДЛЯ ОСУЩЕСТВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ САМОЛЕТА | 2001 |
|
RU2206873C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |
| WO 0232764 A1, 25.04.2002 | |||
| US 6012001 A, 04.01.2000. | |||

