Изобретение относится к вспомогательным приспособлениям для электронных микроскопов и может быть использовано в качестве координатного стола при работе с другими контрольно-измерительными или технологическими приборами, требующими точного позиционирования объекта исследования.
Известны устройства позиционирования, выполненные на основе пьезоэлектрических приводов (DE 3833091 A1, G 12 В 5/00, 05.04.1990; ЕР 0149017 А2, G 02 В 21/26, 24.07.1985).
Недостатки известных устройств связаны с малым числом обеспечиваемых степеней свободы при регулировании местоположения объекта исследования. Кроме того, пьезоэлектрический принцип позиционирования предопределяет генерацию электромагнитных помех, что является крайне нежелательным при отдельных исследованиях и технологических процессах.
Известно шестикоординатное устройство позиционирования для электронного микроскопа, содержащее основание, пять установленных одна над другой горизонтальных платформ, верхняя из которых является предметным столиком, а также связанные с соответствующими платформами приводы линейного перемещения и привод вращательного перемещения, выполненные с использованием шариков, упругих опор, шарниров и связей, а также механизмов с гибкими звеньями (RU 2160884 C1, G 01 В 5/00, 20.12.2000).
Недостаток указанного устройства определяется невысокой надежностью работы, ограниченным сроком службы и существенной сложностью настройки, которые обусловлены некачественными приводами.
Наиболее близким к предложенному является устройство позиционирования на основе гидравлического привода, содержащее две параллельные платформы и привод вертикального перемещения, включающий размещенную между платформами трубку в виде тора, упруго деформируемую под действием давления энергоносителя, и средство создания давления (DE 3427213 A1, G 02 В 21/26, 30.01.1986). Данное устройство позволяет варьировать параметры позиционирования только в вертикальном направлении.
Техническим результатом является создание устройства, позволяющего обеспечить позиционирование в любом требуемом направлении при обеспечении высокой его точности.
Технический результат достигается тем, что в устройстве позиционирования, содержащем две параллельные платформы и привод перемещения, включающий размещенную между платформами трубку, упруго деформируемую под действием давления энергоносителя, и средство создания давления, привод перемещения дополнительно включает размещенную между платформами вторую трубку, аналогичную указанной трубке, обе трубки выполнены прямолинейными овального сечения и размещены так, что их продольные оси параллельны, а каждая связана с обеими платформами в зонах своих образующих, лежащих в плоскости малых осей их поперечных сечений.
Достижению технического результата способствуют частные варианты выполнения устройства.
В устройстве по первому варианту трубки привода перемещения размещены с ориентированием больших осей поперечных сечений параллельно указанным первой и второй платформам с возможностью обеспечения изменения расстояния между платформами при одновременном создании давления в обеих трубках и обеспечения поворота одной из платформ вокруг оси, параллельной осям трубок, в обе стороны при создании давления в одной из трубок, а привод перемещения представляет собой привод вертикального перемещения и/или поворота.
Это устройство может быть снабжено третьей платформой и вторым приводом вертикального перемещения и/или поворота, выполненным аналогично первому указанному приводу, трубки второго указанного привода размещены между второй и третьей платформой так, что их продольные оси перпендикулярны осям трубок первого указанного привода.
Кроме того, оно также может быть снабжено первой дополнительной платформой и приводом горизонтального перемещения, включающим трубки, упруго деформируемые под действие давления энергоносителя, размещенные между одной из крайних из указанных двух или трех платформ и первой дополнительной платформой с ориентированием малых осей поперечных сечений параллельно указанным платформам и связанные с соответствующими платформами посредством имеющихся на этих платформах перпендикулярных к ним выступов с возможностью плоскопараллельного перемещения этих платформ друг относительно друга при одновременном создании давления в обеих этих трубках.
Устройство также может быть снабжено второй дополнительной платформой и вторым приводом горизонтального перемещения, который выполнен аналогично указанному первому приводу горизонтального перемещения и трубки которого расположены между одной из крайних из указанных двух, или трех, или четырех платформ и второй дополнительной платформой так, что их продольные оси перпендикулярны продольным осям трубок первого привода горизонтального перемещения.
В устройстве по второму варианту трубки привода перемещения размещены с ориентированием малых осей поперечных сечений параллельно указанным первой и второй платформам и связаны с соответствующими платформами посредством имеющихся на платформах перпендикулярных к ним выступов с возможностью плоскопараллельного перемещения платформ друг относительно друга при одновременном создании давления в обеих трубках, а привод перемещения представляет собой привод горизонтального перемещения.
При этом оно может быть снабжено третьей платформой и вторым приводом горизонтального перемещения, который выполнен аналогично указанному первому приводу горизонтального перемещения, а трубки которого размещены между второй и третьей платформами так, что продольные оси его трубок перпендикулярны осям трубок первого привода горизонтального перемещения.
Любое из описанных устройств может быть снабжено приводом вращения, связанным с одной из крайних из указанных платформ.
Указанный привод вращения может включать две трубки, расположенные между одной из крайних из указанных платформ и третьей дополнительной платформой и упруго деформируемые под действием давления энергоносителя, и средство создания давления, указанные трубки связаны с соответствующими платформами посредством имеющихся на каждой платформе перпендикулярных к ним выступов, расположенных на каждой платформе по два со стороны каждой трубки и по одному со стороны каждой образующей, лежащей в плоскости малых осей поперечных сечений трубки, так что пары выступов обеих платформ разнесены по длине соответствующей трубки, а все выступы расположены симметрично относительно оси, перпендикулярной платформам.
В другом варианте выполнения привода вращения он может включать, по меньшей мере, три трубки, упруго деформируемые под действием давления энергоносителя, и средство создания давления, трубки изогнуты так, что их оси лежат в одной плоскости, параллельной платформам, и имеют каждая форму логарифмической спирали, одни концы трубок связаны с основанием, а другие концы трубок связаны с одной из платформ.
В устройстве по третьему варианту трубки привода перемещения, представляющего собой привод вращения, могут быть размещены с ориентированием малых осей поперечных сечений параллельно платформам и связаны с соответствующими платформами посредством имеющихся на каждой платформе перпендикулярных к ним выступов, расположенных на каждой платформе по два со стороны каждой трубки и по одному со стороны каждой образующей, лежащей в плоскости малых осей поперечных сечений трубки так, что пары выступов обеих платформ разнесены по длине соответствующей трубки, а все выступы расположены симметрично относительно оси, перпендикулярной платформам.
В любом из описанных выше устройств в каждом приводе перемещения трубки могут быть выполнены металлическими, средство создания давления может быть выполнено в виде металлического сильфона с приводным винтом, сообщенного с каждой трубкой для привода вертикального перемещения и/или поворота или со всеми трубками для других приводов, а сообщенные полости трубки или трубок и сильфона заполнены жидким энергоносителем.
Технический результат достигается также тем, что частью устройства может являться привод вращения, содержащий упруго деформируемую под действием давления энергоносителя трубку и средство создания давления, отличающееся тем, что трубка имеет овальное поперечное сечение и закручена вокруг своей оси с возможностью раскручивания при создании в ней давления.
Кроме того, трубка может быть выполнена металлической, средство создания давления может быть выполнено в виде металлического сильфона с приводным винтом, а сообщенные друг с другом полости трубки и сильфона заполнены жидким энергоносителем.
На фиг.1 представлена схема общего вида варианта выполнения устройства с приводом вращения в виде закрученной трубки в аксонометрии; на фиг.2 - конструкция того же варианта устройства, в разрезе; на фиг.3 - вариант привода вращения в виде трех спиральных трубок, вид сверху; на фиг.4 - осевое сечение на фиг.3; на фиг.5 - вариант привода вращения с двумя трубками; на фиг.6 - выполнение средства создания давления.
Выполнение устройства раскрыто на примере шестикоординатного устройства позиционирования (фиг. 1, 2). Устройство представляет собой платформы 1-5, установленные одна над другой, и приводы перемещения, включающие пары трубок 6 и 7, 8 и 9, 10 и 11, 12 и 13, размещенные между соответствующими платформами 1 и 2, 2 и 3, 3 и 4, 4 и 5 и связанные с ними. Верхняя платформа 1 является предметным столиком для микроскопа.
Трубки 6-13 являются упруго деформируемыми под действие давления энергоносителя и выполнены прямоугольными овального сечения. Продольные оси каждой пары трубок параллельны, а каждая трубка связана с обеими соответствующими платформами в зонах своих образующих, лежащих в плоскости малых осей их поперечных сечений, так, что при создании в них давления размер трубок по малой оси увеличивается, и перемещение стенок трубки передается на платформы.
В зависимости от ориентации осей трубок относительно платформ могут создаваться различные виды перемещений: вертикальное, горизонтальное, поворот вокруг горизонтальной оси и вращение вокруг вертикальной оси, т.е. перемещение по всем шести координатам.
Пары трубок 6 и 7, 8 и 9 размещены соответственно между платформами 1 и 2, 2 и 3 так, что большие оси их поперечных сечений параллельны указанным платформам. Такое размещение позволяет изменять расстояние между указанными платформами при одновременном создании давления в обеих трубках каждой пары 6 и 7 или 8 и 9. При создании давления в одной из трубок пары 6 и 7 или 8 и 9 обеспечивается поворот (наклон) платформы 1 или 2 вокруг оси, параллельной оси трубок. Поскольку оси трубок 6 и 7 перпендикулярны осям трубок 8 и 9, они обеспечивают поворот платформы вокруг взаимно перпендикулярных осей. Таким образом, описанные два привода вертикального перемещения и/или поворота обеспечивают позиционирование по трем координатам.
Пары трубок 10 и 11, 12 и 13 размещены соответственно между платформами 3 и 4, 4 и 5 и образуют приводы горизонтального перемещения в двух перпендикулярных направлениях. Малые оси указанных трубок 10-13 параллельны платформам 3-5 и связаны с ними посредством перпендикулярных выступов, имеющихся на платформах 3-5. Выступы выполнены в виде пластин, а каждая трубка 10-13 размещена между двумя выступами разных платформ так, что в поперечном сечении выступы одной из платформ находятся с одноименных сторон от соответствующей трубки (например, выступы платформы 4, направленные вниз, находятся справа от поперечных сечений трубок 12, 13, а выступы платформы 5, направленные вверх, находятся слева от поперечных сечений трубок 12, 13) и скреплены с трубками в зонах образующих, лежащих в плоскости малых осей поперечных сечений трубок. Такое расположение трубок обеспечивает увеличение расстояния между выступами, связанными с каждой трубкой, при создании в ней давления.
Поскольку оси трубок 10 и 11 перпендикулярны осям трубок 12 и 13, описанные приводы обеспечивают линейное горизонтальное перемещение во взаимно перпендикулярных направлениях.
Каждый из описанных приводов перемещения может использоваться самостоятельно, и любые из них могут быть связаны друг с другом в любом сочетании в зависимости от требуемых координат позиционирования.
Также самостоятельно или в сочетании с любыми из описанных приводов может использоваться любой из описанных ниже приводов вращения.
На фиг.5 показан вариант привода вращения, в основе которого также лежат две трубки 14, 15, расположенные между двумя платформами 16, 17 и упруго деформируемые под действием давления энергоносителя. Трубки 14, 15 связаны с платформами 16, 17 посредством имеющихся на последних перпендикулярных выступов, расположенных на каждой платформе по два со стороны каждой образующей, лежащей в плоскости малых осей поперечного сечения трубки 14 и 15.
Пары выступов обеих платформ 16, 17 разнесены по длине соответствующей трубки, а все выступы расположены симметрично относительно оси, перпендикулярной платформам 16, 17 так, что при создании в трубках 14, 15 давления платформы 16, 17 будут вращаться (поворачиваться) друг относительно друга вокруг указанной оси.
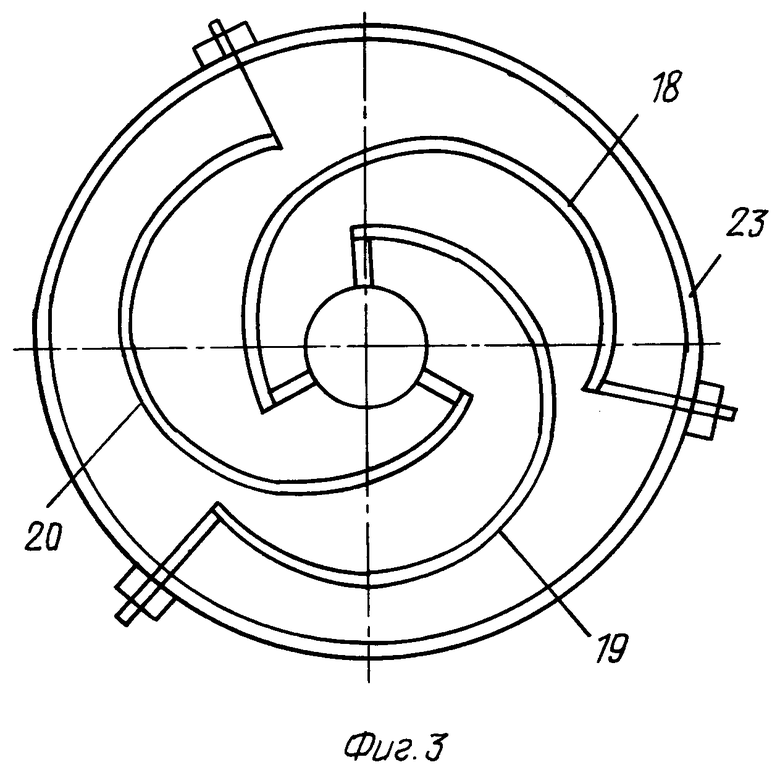
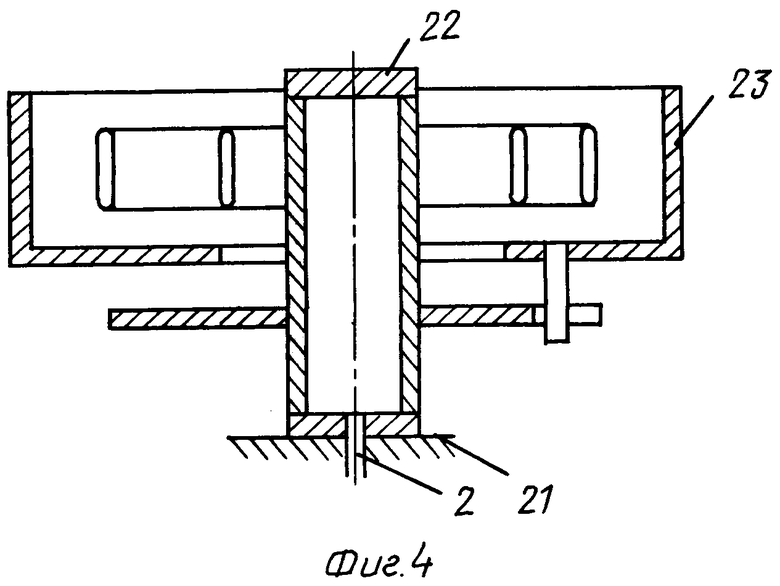
На фиг. 3, 4 показан второй вариант выполнения привода вращения в виде трех трубок 18-20, упруго деформируемых под действием давления энергоносителя. Трубки 18-20 изогнуты так, что их оси лежат в одной плоскости, параллельной платформам 1-5 и имеют каждая форму логарифмической спирали и овальное сечение с ориентированием малой оси параллельно платформам. Концы трубок 18-20, расположенные ближе к центру симметрии спиралей, связаны с основанием 21 посредством полой оси 22, сообщающей полости трубок со средством создания давления. Другие концы трубок 19-20 связаны с одной из платформ 1-5 посредством кольца 23. При создании давления в трубках 18-20 они будут разгибаться и поворачивать (вращать) кольцо 23, а через него - платформу.
На фиг.1, 2 показан вариант выполнения привода вращения в виде трубки 24 с овальным поперечным сечением, закрученной вокруг своей оси. Трубка 24 является упруго деформируемой под действием давления энергоносителя. Верхний торец трубки 24 связан с платформой, например платформой 5 или непосредственно с платформой, являющейся предметным столиком, а нижний торец - с основанием 25. При создании давления в трубке 24 она начинает раскручиваться, поворачивая (вращая) платформу вокруг перпендикулярной к ней оси.
Все трубки в устройстве выполнены металлическими (стальными или иными) и соединены каждая со средством создания давления (фиг.6) в виде металлического сильфона 25 с приводным винтом 27, приводимым в движение шаговым электродвигателем или вручную. Полости трубки и сильфона 26 сообщены и заполнены жидким энергоносителем, коэффициент температурного расширения которого и изменение объема при сжатии близки к нулю. Предпочтительными являются специальные, жидкие металлы и масла для гидроприводов. При сжатии-расширении сильфона происходит пропорциональное изменение объема трубки и соответствующее перемещение связанных с ней платформ.
В приводах вращения и горизонтального перемещения обе трубки 10 и 11, 12 и 13, 14 и 15 каждого привода соединены с одним общим сильфоном, так как в них давление создается одновременно. В приводах вертикального перемещения и поворота (наклона) каждая из трубок 6 и 7, 8 и 9 соединена со своим сильфоном, поскольку в них давление создается как одновременно, так и порознь. На фиг.2 показаны магистрали 28, соединяющие трубки с сильфонами.
Работает устройство следующим образом.
Перед началом исследования какого-либо объекта электронным микроскопом выполняют экспериментальную градуировку позиционирующего устройства, а также градуировку с учетом температурных расширений.
В процессе исследования расположенного на предметном столике (платформе 1) объекта перемещение предметного столика осуществляется вручную исследователем или по заданной программе специальным узлом управления. В первом случае производится необходимое перемещение подкручиванием управляющих приводных винтов 27, а во втором - централизованное управление шаговыми электродвигателями. При сжатии-расширении того или иного сильфона 26 происходит пропорциональное изменение объема и перемещение исполнительного органа - трубок соответствующего привода.
При подаче давления в трубку 24 происходит вращательное перемещение платформы 5 относительно основания 25 вокруг оси Z при сохранении их параллельности.
При подаче давления в трубки 12 и 13 платформа 4 линейно перемещается относительно платформы 5 вдоль оси X.
При подаче давления в трубки 10 и 11 платформа 3 линейно перемещается относительно платформы 4 вдоль оси Y.
При подаче давления в трубки 8 и 9 изменяются расстояния между краями платформ 2 и 3, либо платформа 2 наклоняется относительно оси Х в ту или иную сторону.
При подаче давления в трубки 6 и 7 изменяются расстояния между краями платформ 1 и 2, и платформа 1 наклоняется относительно оси Y в ту или иную сторону.
При одновременной подаче давления в трубки 8 и 9 платформа 2 перемещается относительно платформы 3 вдоль оси Z.
При одновременной подаче давления в трубки 6 и 7 платформа 1 перемещается относительно платформы 2 вдоль оси Z.
Таким образом, описанный вариант предложенного устройства при достаточно простой и надежной конструкции обеспечивает позиционирование предметного столика с шестью степенями свободы. Использованные в устройстве гидравлические приводы успешно выдерживают до 109 циклов работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПЕРЕМЕЩЕНИЯ И СХВАТ | 2002 |
|
RU2215198C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ВАКУУМНЫХ ОБЪЕМОВ | 2002 |
|
RU2232329C1 |
| МЕХАНИЗМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ | 2002 |
|
RU2210682C1 |
| НОРМАЛЬНО ЗАКРЫТЫЙ КЛАПАН НА ОСНОВЕ ТРУБЧАТОГО УПРУГОДЕФОРМИРУЕМОГО ЭЛЕМЕНТА | 2002 |
|
RU2224156C1 |
| ВАКУУМНЫЙ ЗАТВОР | 1996 |
|
RU2109196C1 |
| ОПОРА ТРУБОПРОВОДА | 2002 |
|
RU2211981C1 |
| ВАКУУМНЫЙ ЗАТВОР | 1996 |
|
RU2114354C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ГАЗА В ПНЕВМОСИСТЕМУ | 2001 |
|
RU2204060C1 |
| ЗАТВОР | 1998 |
|
RU2147349C1 |
| КООРДИНАТНОЕ УСТРОЙСТВО | 2001 |
|
RU2211114C2 |



Изобретение относится к вспомогательным приспособлениям для электронных микроскопов и может быть использовано в качестве координатного стола при работе с другими приборами. Изобретение позволяет обеспечивать позиционирование в требуемом направлении при обеспечении его высокой точности. Изобретение содержит две параллельные платформы и привод перемещения, включающий размещенные между платформами две трубки, упруго деформируемые под действием давления энергоносителя. Трубки выполнены прямолинейными овального сечения и размещены так, что их продольные оси параллельны, а каждая трубка связана с обеими платформами в зонах своих образующих, лежащих в плоскости малых осей их поперечных сечений. При ориентировании больших осей поперечных сечений трубок параллельно платформам привод осуществляет вертикальное перемещение и/или поворот. При ориентировании больших осей поперечных сечений перпендикулярно платформам привод может осуществлять горизонтальное перемещение или вращение в зависимости от расположения на платформах выступов, связывающих трубки с платформами. Возможно использование привода вращения в виде трех трубок, оси которых лежат в одной плоскости и изогнуты в виде упругодеформируемой закрученной вокруг своей оси трубки. 4 с. и 14 з.п. ф-лы, 6 ил.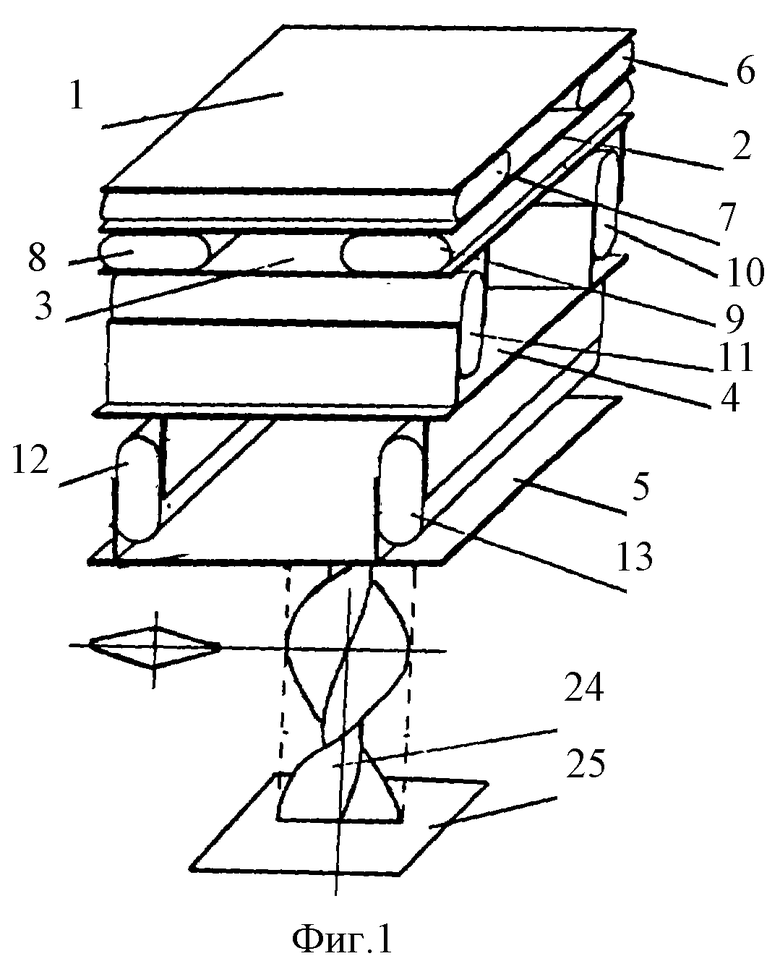
| DE 3427213 A1, 30.01.1986 | |||
| Пятиосный столик для аналитических исследований | 1954 |
|
SU103213A1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| GB 1436330 А, 19.05.1976 | |||
| Устройство для автоматического регулирования концентрации мономера в шихте | 1976 |
|
SU658136A1 |
| Фотоэлектрическое устройство для деления длины изделия на части | 1959 |
|
SU125045A1 |
