Изобретение относится к исполнительным механизмам и может быть использовано для подачи в зону обработки изделий и их удаления из зоны обработки в высоком вакууме.
Известен механизм перемещения, содержащий упругодеформируемый элемент, выполненный в виде четырех изогнутых плоских трубок, соединенных своими концами с образованием замкнутого контура так, что две первые противоположные трубки изогнуты в направлении друг к другу, а две вторые - в направлении друг от друга, и установленный на одной из первых трубок штуцер для подачи рабочей среды, предназначенный для крепления привода (Васин В.А. Ресурсосберегающие принципы проектирования исполнительных устройств оборудования для высоких технологий. Журнал "Машиностроитель", Москва, 1997, 9, с. 39-40). Данный механизм создает перемещение только одной из двух первых трубок. При выполнении схвата (захвата) на основе такого привода будет происходить асимметричное перемещение одной из трубок, что сужает возможности его применения. При использовании двух захватов на одной из трубок будет закреплен один из захватов и штуцер, что снижает долговечность трубки.
Решаемой задачей является создание механизма возвратно-поступательного перемещения с расширенными эксплуатационными возможностями.
Технический результат данного предложения заключается в обеспечении симметричного перемещения трубок и губок захвата, позволяющего удерживать несущую раму и создавать ее возвратно-поступательное перемещение.
Технический результат достигается тем, что механизм возвратно-поступательного перемещения содержит несущую раму и, по меньшей мере, два захвата, каждый из которых включает направленные в противоположные стороны с возможностью удержания несущей рамы губки, закрепленные на противоположных частях упругого трубчатого элемента, выполненного с возможностью сообщения с источником текучей среды, и два привода, каждый из которых включает упругий трубчатый элемент, выполненный с возможностью сообщения с источником текучей среды и несущий соответствующий трубчатый элемент захвата, который может быть закреплен на упругом трубчатом элементе привода через трубчатую стойку и сообщен через них с источником текучей среды.
Упругий трубчатый элемент привода также может быть сообщен с источником текучей среды через трубчатые стойки, закрепленные на основании.
Трубчатые элементы захвата могут быть выполнены из трубок, две из которых несут захваты и выпуклостями обращены друг к другу, а две другие выпуклостями обращены в противоположные стороны и одна из них сообщена с источником текучей среды.
Трубчатые элементы привода могут быть образованы сообщенным с источником текучей среды прямолинейным участком, сопряженными с ним изогнутыми в направлении друг друга участками и связывающим концы последних трубчатым держателем, который выполнен U-образным и им охвачена соответствующая трубчатая стойка.
Сущность изобретения поясняется чертежами.
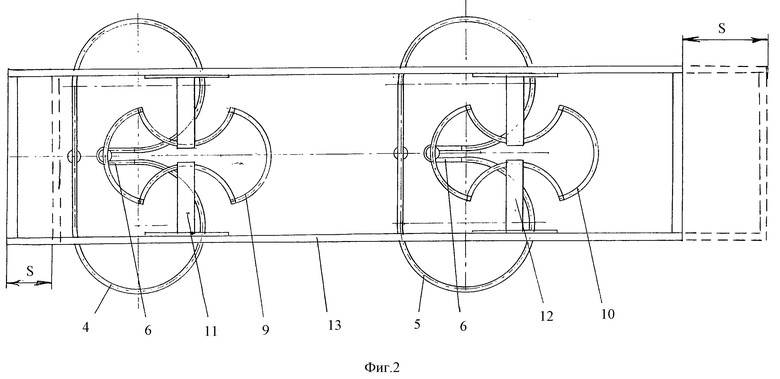
На фиг.1 показан схематично механизм (вид сбоку); на фиг.2 - то же, вид сверху.
Механизм состоит из основания - плиты 1 (плита 1 может быть стенкой камеры оборудования), в которой герметично закреплены трубчатые стойки 2 и 3, с одной стороны соединенные с источником избыточного давления (не показан), а с другой герметично соединены с приводами в виде упругих трубчатых элементов 4 и 5, свободные концы которых герметично соединены с держателем 6, который объединяет части пневматической пружины, образуя замкнутый контур, что увеличивает жесткость привода и увеличивает несущую способность.
Каждый из двух упругих трубчатых элементов 4 и 5 приводов имеет прямолинейный участок, сообщенный с соответствующей трубчатой стойкой 2 или 3, и сопряженные с ним изогнутые в направлении друг друга участки, связанные U-образными держателями 6.
В держателях 6 приводов горизонтального перемещения жестко закреплены трубчатые стойки 7 и 8, каждая из которых одним концом герметично связана с источником давления текучей среды гибкими переходниками, а к другому концу жестко и герметично прикреплены захваты, включающие упругие трубчатые элементы 9 и 10, выполненные каждый в виде полой пневмопружины в форме гантели из отдельных секторов, герметично соединенных между собой. Каждый упругий трубчатый элемент 9 или 10 образован четырьмя сообщенными трубчатыми участками, два из которых обращены выпуклостями друг к другу и несут губки 11 и 12, а два других выпуклостями обращены в противоположные стороны и один из них соединен с трубчатой стойкой 7 или 8 для подачи текучей среды. Губки 11 и 12 жестко прикреплены к упругому трубчатому элементу 9 или 10 симметрично относительно центральной продольной оси и выполнены каждая в виде жесткой пластины, концы которой имеют форму уголка. Причем все уголки губок 11 и 12 расположены в одном уровне горизонтальной плоскости. На губках 11 и 12 установлена несущая рама 13, на конце которой жестко закреплен контейнер 14 для расположения и крепления на ней перемещаемых деталей.
Принцип работы заключается в следующем.
В начальном положении несущая рама 13 с контейнером 14 покоится в губках 11 и 12 захватов 9 и 10 соответственно в свободном состоянии и в приводы 4 и 5 горизонтального перемещения и пневмопружины 9 и 10 захватов давление от пневмоисточника не подается. Для осуществления перемещения несущей рамы 13 с контейнером 14 необходимо подать давление изначально в одну из двух пневмопружин захвата, например 9, для фиксации несущей рамы 13 и удержания ее в горизонтальном положении при движении. Затем подается давление в привод 4 горизонтального перемещения, что приводит к перемещению всей системы, т.е. пневмопружины 9 захвата с закрепленными в нем несущей рамой 13 и контейнером 14 в горизонтальном направлении на величину S (величина хода привода горизонтального перемещения). После чего подается давление в пневмопружину 10 захвата и одновременно сбрасывается давление из пневмопружины 9 захвата. Теперь несущая рама 13 и контейнер 14, находясь в другом, отличном от первоначального положении, удерживаются губками 12. Затем подается давление в привод 5 горизонтального перемещения и одновременно сбрасывается давление из привода 4, что приводит к горизонтальному перемещению схвата 10 с удерживаемыми в нем губками 12 несущей рамы 13 и контейнера 14 еще на одну величину S (поскольку приводы 4 и 5 имеют одинаковую конструкцию и, следовательно, одинаковый ход), а привод 4 горизонтального перемещения, возвращаясь в исходное положение, возвращает и пневмопружину 9 с губками 11. Таким образом, за один цикл работы устройства несущая рама 13 и контейнер 14 переместились на 2S. При многократном повторении описанного цикла несущая рама 13 и контейнер 14 достигает намеченной точки назначения и в этот момент давление из всех пневмопружин 4 и 5, 9 и 10 сбрасывается, тем самым фиксируя конечное положение.
При возвращении несущей рамы с контейнером 14 в начальное положение необходимо изменить цикл подачи давления на обратное, т.е. сначала подается давление, например, в пневмопружину 10 и губками 12 фиксируется несущая рама 13. Затем подается давление в упругий элемент 4 привода горизонтального перемещения, тем самым перемещается пневмопружина 9 в горизонтальном направлении, но без несущей рамы 13 и контейнера 14. После чего подается давление в пневмопружину 9 и одновременно сбрасывается давление в пневмопружине 10. Затем сбрасывается давление в пневмопружине 4 привода, тем самым возвращается пневмопружина 9 с удерживаемыми губками 11, несущая рама 13 и контейнер 14 на один шаг S назад, и одновременно подается давление в привод 5 и перемещается пневмопружина 10 с губками 12 в горизонтальном направлении, но без несущей рамы 13 и контейнера 14. При повторении подобного цикла многократно несущая рама 13 и контейнер 14 займут первоначальное положение.
При наличии в механизме трех и более захватов порядок их работы остается таким же, при этом за один цикл работы несущая рама и контейнер переместятся на величину 3S, 4S и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПЕРЕМЕЩЕНИЯ И СХВАТ | 2002 |
|
RU2215198C1 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ И ПРИВОД ВРАЩЕНИЯ ДЛЯ НЕГО | 2001 |
|
RU2206913C2 |
| ОПОРА ТРУБОПРОВОДА | 2002 |
|
RU2211981C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ВАКУУМНЫХ ОБЪЕМОВ | 2002 |
|
RU2232329C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ГАЗА В ПНЕВМОСИСТЕМУ | 2001 |
|
RU2204060C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2002 |
|
RU2219397C1 |
| НОРМАЛЬНО ЗАКРЫТЫЙ КЛАПАН НА ОСНОВЕ ТРУБЧАТОГО УПРУГОДЕФОРМИРУЕМОГО ЭЛЕМЕНТА | 2002 |
|
RU2224156C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ | 1998 |
|
RU2133706C1 |
| ВАКУУМНЫЙ ЗАТВОР | 1996 |
|
RU2114354C1 |
| КООРДИНАТНОЕ УСТРОЙСТВО | 2001 |
|
RU2211114C2 |
Механизм предназначен для возвратно-поступательного перемещения исполнительного органа. Механизм содержит несущую раму и, по меньшей мере, два захвата, каждый из которых включает направленные в противоположные стороны с возможностью удержания рамы губки, закрепленные на противоположных частях упругого трубчатого элемента, предназначенного для сообщения с источником текучей среды, и два привода, каждый из которых включает в себя упругий трубчатый элемент, предназначенный для сообщения с источником текучей среды и несущий соответствующий трубчатый элемент захвата. Технический результат - расширение эксплуатационных возможностей. 5 з.п.ф-лы, 2 ил.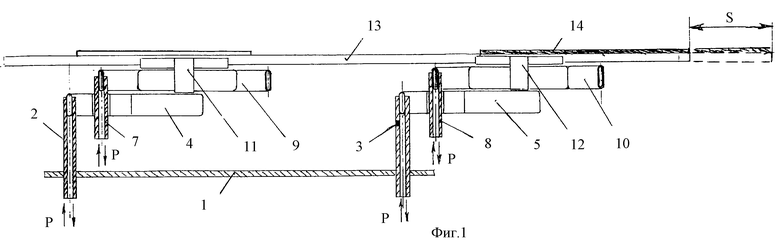
| ВАСИН В.А | |||
| Ресурсосберегающие принципы проектирования исполнительных устройств оборудования для высоких технологий | |||
| Ж | |||
| "Машиностроитель" | |||
| - М., 1997, № 9, с.39-40 | |||
| Пневмогидравлический привод | 1988 |
|
SU1679068A1 |
| Пневматическое устройство для перемещения поддонов | 1990 |
|
SU1772433A1 |
| DE 1450723 A1, 15.03.1973 | |||
| Механизированный склад пылевидных материалов | 1977 |
|
SU656925A1 |

