Предлагаемое изобретение относится к резервированным электрогидравлическим рулевым приводам, предназначенным для применения в высоконадежных системах автоматического управления, например в системах дистанционного управления полетом летательного аппарата.
Одним из требований обеспечения отказобезопасности таких приводов является необходимость установки и фиксации выходного звена привода (силового штока) в среднем положении после отказа привода. Эта задача может быть решена с помощью подвижных механических упоров, например как в приводе по а.с. 1066280, F 15 B 9/03 или с помощью специального гидроцилиндра, включаемого гидроклапанами с гидрологикой, например как по а.с. 1772432 А1, F 15 B 9/03.
Эти решения конструктивно сложны, не обеспечивают компактности и минимального веса конструкции привода.
Наиболее близким по технической сущности является решение по а.с. 1601907, МКИ В 64 С 13/42.
Резервированный электрогидравлический привод по а.с. 1601907 содержит двухкамерный силовой гидроцилиндр с силовым штоком, датчиком обратной связи, многоканальную электрогидравлическую рулевую машину, связанную с золотниковым распределительным устройством и снабженную электромагнитными клапанами отключения каналов, гидролинии нагнетания и слива, а также гидромеханическое устройство, выполненное в виде механизма стопорения и дифференциальной качалки, один из шарнирных узлов которой связан с механизмом стопорения, два других - с распределительным золотником и силовым штоком гидроцилиндра.
Привод имеет тот недостаток, что дифференциальная качалка гидромеханического устройства, предназначенного для обеспечения установки силового штока в среднее положение при отказе электрогидравлических каналов управления, в случае больших ходов силового штока должна иметь соответственно большие габариты. Одновременно пропорционально увеличению хода увеличиваются габариты механизма стопорения.
Технической задачей изобретения является устранение указанных недостатков, а именно: сокращение габаритов и соответственно массы гидромеханического устройства, обеспечение независимости размеров этого устройства от величины максимального хода силового штока.
Поставленная задача решается тем, что для приведения силового штока в среднее положение при отказе электрогидравлического управления привод снабжен гидромеханическим устройством, выполненным в виде гидравлического цилиндра стопорения и рычажного механизма, состоящего из рычага с роликом на одном плече и дифференциальной качалки, средняя точка которой соединена шарниром со вторым плечом рычага, а крайние точки соединены через шарнирные тяги с гидравлическим цилиндром стопорения и золотниковым распределительным устройством, при этом в среднем положении силового штока ролик контактирует с конической поверхностью на силовом штоке и прижимается к нему совместно гидравлическим цилиндром стопорения и пружиной, расположенной соосно с золотниковым распределительным устройством.
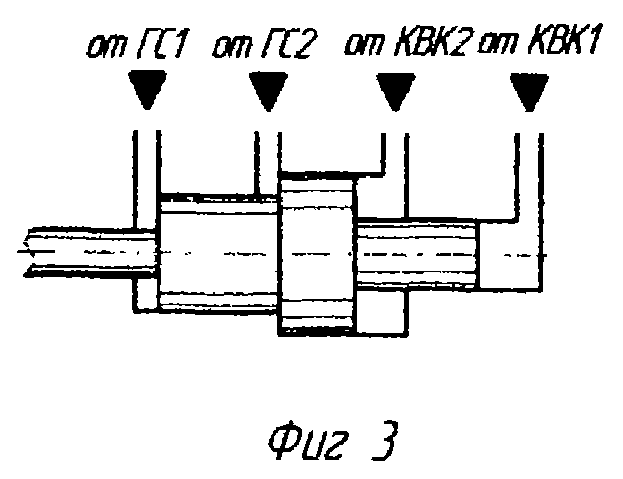
Для двухкамерного привода, работающего от двух независимых гидросистем, гидравлический цилиндр стопорения выполняется в виде цилиндра с трехступенчатым плунжером, который образует четыре рабочие полости, две из которых соединены непосредственно с линиями нагнетания соответствующих гидросистем, а две другие - через соответствующие клапаны включения-кольцевания.
Обеспечение требуемой скорости приведения силового штока в среднее положение осуществляется регулировкой положения (подъема) ролика в рычаге и ограничителем перемещения рычага.
Сущность заявляемого изобретения поясняется чертежом, где представлена общая схема привода.
Электрогидравлический рулевой привод содержит силовой гидроцилиндр 1 с силовым штоком и датчиком обратной связи 2, корпус с золотниковым распределительным устройством 3, штоком 4 и датчиком обратной связи 5, управляемым электрогидравлическим усилителем мощности (ЭГУ) 14, электромагнитный клапан (ЭГК) 15, клапан включения-кольцевания (КВК) 13, гидромеханическое устройство, содержащее гидравлический цилиндр стопорения 6 и рычажный механизм, состоящий из рычага 7 с роликом 8 на одном плече и дифференциальной качалки 9, средняя точка которой соединена шарниром со вторым плечом рычага, а крайние точки соединены через шарнирные тяги 10, 11 с золотниковым распределительным устройством 3 и гидравлическим цилиндром стопорения 6. Рабочие окна клапана включения-кольцевания 13 соединяют гидролиниями 16, 17, электрогидравлический усилитель мощности - с полостями управления золотникового распределительного устройства, а дополнительные рабочие окна в положении золотника, соответствующем кольцеванию, соединяют через межбуртовую камеру 23, гидролинию нагнетания 20 - с полостью 19 гидравлического цилиндра стопорения 6, при этом гидролиния нагнетания 20 отключена от электрогидравлического усилителя мощности 14. В положении золотника клапана включения-кольцевания 13, соответствующем включению, дополнительные рабочие окна соединяют через межбуртовую камеру 23 гидролинию слива 21 с полостью 19 гидравлического цилиндра стопорения 6, а через межбуртовую камеру 24 - гидролинию нагнетания 20 с электрогидравлическим усилителем мощности 14. Управляющая камера клапана включения-кольцевания 13 соединена с выходом электромагнитного клапана 15.
На фиг.2 показана конструктивная схема регулировки положения ролика 8 в рычаге 7 и ограничителя 22 перемещения рычага для обеспечения требуемой скорости приведения силового штока в среднее положение.
На фиг. 3 показана конструктивная схема гидравлического цилиндра стопорения для двухкамерного привода, работающего от двух независимых гидросистем ГС1 и ГС2, выполненного в виде цилиндра с трехступенчатым плунжером, который образует четыре рабочие полости, две из которых непосредственно соединены с линиями нагнетания соответствующих гидросистем, а две другие - через соответствующие клапаны включения-кольцевания КВК1 и КВК2.
Привод работает следующим образом.
Под воздействием управляющего сигнала электрогидравлический усилитель мощности 14 распределяет подведенный к нему из гидролинии нагнетания 20 поток рабочей жидкости через включенный клапан включения-кольцевания 13 и гидролинии 16 и 17 в полости управления золотниковым распределительным устройством 3, вызывая перемещение золотника на величину, соответствующую управляющему сигналу, при этом датчик обратной связи 5 выдает сигнал, пропорциональный перемещению золотника для компенсации входного сигнала. Золотниковое распределительное устройство 3, в свою очередь, распределяет поток рабочей жидкости из линии нагнетания 20 в рабочие полости силового гидроцилиндра 1, создавая соответствующее перемещение его силового штока, при этом датчик обратной связи 2 выдает сигнал, пропорциональный перемещению силового штока для компенсации входного сигнала. При этом рабочая полость 18 гидравлического цилиндра стопорения 6 соединена с гидролинией нагнетания 20, а рабочая полость 19 через клапан включения-кольцевания 13 включаемым электромагнитным клапаном 15 - с гидролинией слива 21. Под воздействием давления, подведенного в рабочую полость 18, дифференциальный поршень гидравлического цилиндра стопорения сдвинут внутрь, рычаг 7, кинематически связанный через дифференциальную качалку 9 и шарнирную тягу 11 с гидравлическим цилиндром стопорения, повернут так, что при работе золотникового распределительного устройства 3, связанного с дифференциальной качалкой 9 через шток 4 и шарнирную тягу 10, ролик имеет возможность свободно перемещаться, не контактируя с поверхностью силового штока.
При отказе привода или выключении электрогидравлического клапана 15 клапан включения-кольцевания 13 кольцует рабочие полости гидроцилиндра 1, соединяя гидролинии 16 и 17 между собой, отключает гидропитание электрогидравлического усилителя мощности 14 и соединяет полость 19 гидравлического цилиндра стопорения с гидролинией нагнетания 20. Под воздействием давления дифференциальный поршень гидравлического цилиндра стопорения 6 за счет разницы площадей в полостях 18 и 19 выдвигается наружу до упора, поворачивая при этом через шарнирную тягу 11 и дифференциальную качалку 9 рычаг 7 до контакта ролика 8 с конической поверхностью силового штока, если силовой шток находится в среднем положении, либо с цилиндрической - если силовой шток смещен относительно среднего положения внутрь. Если силовой шток смещен наружу, то рычаг 7 под действием пружины 12 поворачивается до упора в ограничитель перемещения рычага 22.
В положении рычага 7, когда ролик контактирует с цилиндрической поверхностью силового штока, золотник распределительного устройства 3, связанный штоком 4 через шарнирную тягу 10 и дифференциальную качалку 9 с рычагом 7, устанавливается в положение, обеспечивающее движение силового штока наружу. Шток движется до тех пор, пока ролик 8 рычага 7 не переместится с цилиндрической поверхности на коническую, при этом золотник распределительного устройства 3, связанный кинематикой с рычагом 7, сместится в нейтральное положение, запирая полость силового гидроцилиндра и фиксируя шток в среднем положении.
Если в момент отказа силовой шток был смещен наружу относительно среднего положения, рычаг 7 под действием пружины 12 поворачивается до упора в ограничитель перемещения рычага. Одновременно золотник распределительного устройства 3 устанавливается в положение, обеспечивающее движение солового штока внутрь. Силовой шток движется до тех пор, пока ролик 8 не установится на коническую поверхность штока, при этом золотник распределительного устройства 3, связанный кинематикой с рычагом 7 и роликом 8, сместится в нейтральное положение, запирая полость силового гидроцилиндра и фиксируя шток в среднем положении.
Скорость силового штока в режиме приведения его в среднее положение зависит от смещения золотника распределительного устройства 3 от нейтрального положения, определяемого углом поворота рычага 7, и обеспечивается регулировкой положения ролика 8 в рычаге 7 при движении силового штока из положения "внутрь" к среднему положению и ограничителя 22 перемещения рычага при движении из положения "наружу" с помощью резьбового соединения, как показано на фиг.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ | 2000 |
|
RU2191297C2 |
| ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2238220C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2211962C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ | 2005 |
|
RU2298698C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ | 2002 |
|
RU2233768C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2005 |
|
RU2288133C1 |
| ЭЛЕКТРОГИДРОМЕХАНИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2191138C2 |
| КОМБИНИРОВАННЫЙ АГРЕГАТ УПРАВЛЕНИЯ | 2012 |
|
RU2532634C2 |
| КОМБИНИРОВАННЫЙ ПРИВОД | 2007 |
|
RU2337856C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
Предлагаемое изобретение относится к резервированным электрогидравлическим рулевым приводам, предназначенным для применения в высоконадежных системах автоматического управления, например в системах дистанционного управления полетом летательного аппарата. Привод снабжен гидромеханическим устройством, выполненным в виде гидравлического цилиндра стопорения и рычажного механизма, состоящего из рычага с роликом на одном плече и дифференциальной качалки, средняя точка которой соединена шарниром со вторым плечом рычага, а крайние точки соединены через шарнирные тяги с гидравлическим цилиндром стопорения и золотниковым распределительным устройством, при этом в среднем положении силового штока ролик контактирует с конической поверхностью на силовом штоке и прижимается к нему совместно гидравлическим цилиндром стопорения и пружиной, расположенной соосно с золотниковым распределительным устройством. Технический результат заключается в сокращении габаритов и соответственно массы гидромеханического устройства, обеспечении независимости размеров этого устройства от величины максимального хода силового штока. 3 з.п.ф-лы, 3 ил.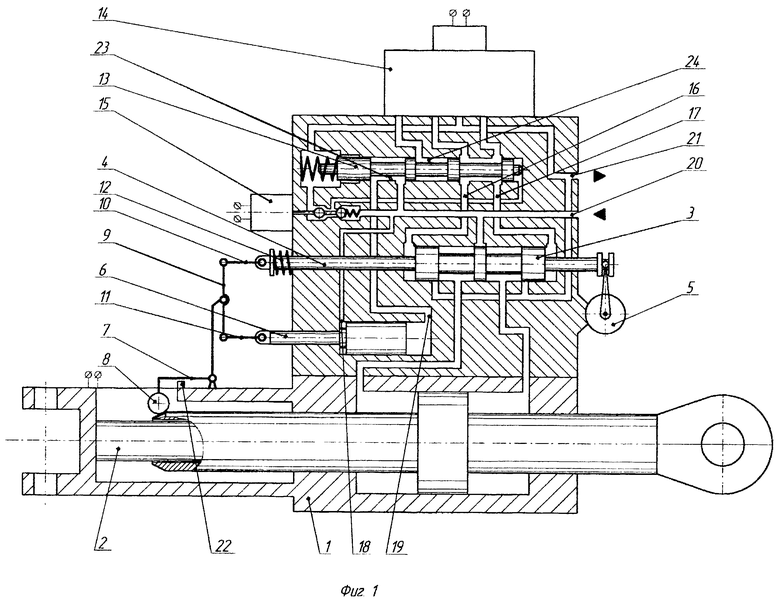
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1989 |
|
SU1601907A1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2092388C1 |
| US 3540350 А, 17.11.1970 | |||
| US 3590690 А, 06.07.1971 | |||
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1997 |
|
RU2133386C1 |

